- MAL4X Научно-технический форум разработчиков симуляторов и автоматики
- 6dof платформа
- MAL4X Научно-технический форум разработчиков симуляторов и автоматики
- 6dof платформа
- 6dof платформа
- Строим motion simulator из палок и синей изоленты
- Стойка игрового руля своими руками (часть 3 — подвижная).
- Найдены возможные дубликаты
- Беспроводной пульт для презентаций своими руками
- Увеличение количества пинов NodeMCU с помощью сдвигового регистра
- Дисплей Nextion и NRF24 беспроводное управлении реле
- Самое простое дистанционное управление компьютером
- Как сделать тетрис классический
MAL4X Научно-технический форум разработчиков симуляторов и автоматики

6dof платформа
karen » 09 окт 2011, 20:36
не сам, конечно: 2 напарника, 1 завод, 1 мастерская и мой гараж 6х6м. )))
(Добавление)
микрики служат для блокировки ? или для выставления нуля?
просто я пока не дошел до варианта управления по CANopen, насколько понимаю там все управляется командами, положение отслеживает сам преобразователь, по энкодерам на движках
Pavel155 » 09 окт 2011, 20:38
karen » 09 окт 2011, 20:38
Pavel155 » 09 окт 2011, 20:42
нет, это только хуже, там что-то связано с производитьностью.
делать надо 3 контроллера, по 2 оси на каждый.
еще в преобразователе попробуй установить время разгона на 0, увеличит резкость
(Добавление)
но с контроллером Таноса надо ставить линейный потенциометр на 50-60 см с аналоговым выходом 0-5В — дорогая штука (.
karen » 09 окт 2011, 20:46
Pavel155 » 09 окт 2011, 20:48
karen » 09 окт 2011, 20:50
Pavel155 » 09 окт 2011, 20:51
у меня стоит PCI плата с 2 ком портами. 2 контроллера, каждый подключен к своему com порту на плате.
4 ось готова, вот тока успользовать ее в гараже не могу, мало габаритов
karen » 09 окт 2011, 20:54
Pavel155 » 09 окт 2011, 20:57
сначало доделаю свой 4 dof, уже красится.
Потом буду проектировать 3dof с 360 градусным вращением для ависимов, или 6dof
Источник
MAL4X Научно-технический форум разработчиков симуляторов и автоматики
6dof платформа
6dof платформа
karen » 08 окт 2011, 10:58
Pavel155 » 08 окт 2011, 19:08
Класно! Но потребления электричества многовато.
А чем не устраивает X-Sim ? он поддержит все 6 осей, тока с настройками будет сложновато. А на http://x-simulator.de где-то я видел плагин или настройку для 6-dof.
(Добавление)
А по какому протоколу хочешь управлять ?
Death_Morozz » 08 окт 2011, 22:16
karen » 09 окт 2011, 13:14
Ребят я не знаю каким протоколом управляется! я только могу сказать что программист приехал из России написал корявую программу даже не дал исходники и уехал.
Могу перечислить частотники, фирма и модель, самопальный контроллер а все остальное я сам допилил, у меня даже профайлы не x-simовские
Pavel155 » 09 окт 2011, 19:14
было бы неплохо, подскажу чем можно им управлять
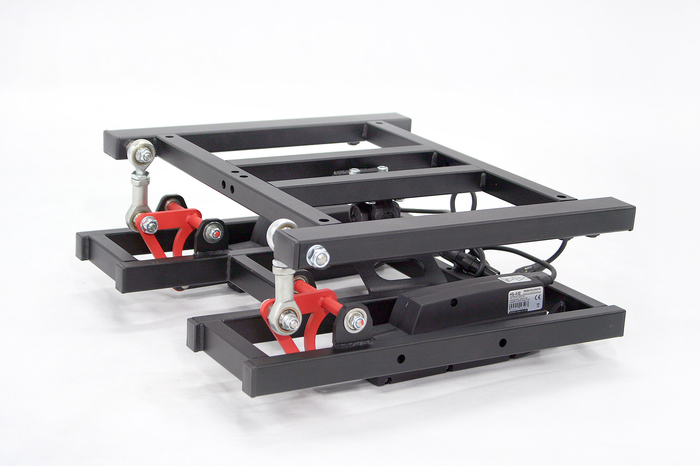
можно фотку с обоих сторон.
У меня возникли вопросы:
1. Зачем преобразователи и системник находятся на платформе ?
Это лишний вес — сказывается на скорости платформы.
2. Почему двигатели стоят вверху ?
Их вес приплюсовывается к платформе, причем набирается около 20 кг. Это потеря скорости.
karen » 09 окт 2011, 19:27
Ответ на вопросы:
1. что бы было все компактно.
«Это лишний вес — сказывается на скорости платформы.» платформа способна поднять 800кг.
2. «Почему двигатели стоят вверху ?» планировалось ставить сим. на набережной Ялты, где после дожей потопы!
«Их вес приплюсовывается к платформе, причем набирается около 20 кг. Это потеря скорости.[/quote]» движки 0.55кв. 1500 их вроде бы хватает с запасом .
жду еще вопросы.
(Добавление)
Частотники Altivar 31 на 0.55 кв. фото контроллера скину позже
Pavel155 » 09 окт 2011, 20:08
а движки как подключены ? звезда или треугольник ?
у меня в звезде платформу с весом 50кг не могут поднять с места
если будешь писать программу то делай для протокола CANopen
Modbus — не стоит, т.к. имеет 60 мс задержку в командах.
karen » 09 окт 2011, 20:19
Pavel155 » 09 окт 2011, 20:20
karen » 09 окт 2011, 20:22
Pavel155 » 09 окт 2011, 20:23
посмотрел преобразователи, аналогом можно управлять 0-10В — скорость.
и еще надо 1 контакт на направление вращения
karen » 09 окт 2011, 20:26
Pavel155 » 09 окт 2011, 20:29
karen » 09 окт 2011, 20:30
Pavel155 » 09 окт 2011, 20:30
не сам, конечно: 2 напарника, 1 завод, 1 мастерская и мой гараж 6х6м. )))
(Добавление)
микрики служат для блокировки ? или для выставления нуля?
просто я пока не дошел до варианта управления по CANopen, насколько понимаю там все управляется командами, положение отслеживает сам преобразователь, по энкодерам на движках
Источник
Строим motion simulator из палок и синей изоленты

Обычно первый комментарий к статье про какую-то неведомую технологию выглядит так: «Вы бы перед тем как углубляться сначала рассказали что это и зачем нужно». Итак, сия чуднАя периферия призвана при игре в автомобильные симуляторы имитировать воздействие перегрузок на игрока. В данном случае это обеспечивается наклоном кресла по двум осям, следовательно получился симулятор движения с двумя степенями свободы.
Наглядная демонстрация:
Кусочек истории
Несколько лет назад увидел в Интернетах этот ролик. Захотелось построить что-то похожее. Рассудив, что такую конструкцию я не осилю, решил сделать просто качающееся кресло. Погуглил, оказалось Америку я не открыл и такие устройства бывают. Девайс, описанный в топике реализован по схеме racingseat, когда кресло закреплено на карданной передаче или её функциональном аналоге. Это уже вторая попытка реализации. Первой была схема joyrider, при которой кресло вращается на двух перпендикулярных осях в идеале пересекающихся в центре масс платформы. Также я исходил из того, что денег нет. Поэтому между хорошим, дешевым, плохим и дорогим пришлось выбирать хорошее и дешевое.
Комплектующие
Двигатель. Изучая тематические ресурсы на предмет выбора, так и не смог найти четкий ответ какой мощности двигатель нужен. В предыдущей версии я использовал двигатель от аккумуляторного шуруповерта, результат был не очень. Обычно для таких целей используют мотор-редукторы для стеклоочистителей автомобилей. Рекомендуют использовать узлы от автомобилей с большими лобовыми окнами (большие легковушки, автобусы, грузовые автомобили), поскольку электромоторы там мощнее. И даже несмотря на это симоводы обычно жалуются на малую мощность. Оценив бюджет я решил забить на рекомендации, смириться с малой мощностью и сделать дешево и сердито — прикупил два мотор-редуктора от Ланоса по $20 каждый. Двигатель маркирован как 30Ваттный. Я полагал пластиковая ведомая шестерня редуктора проживет недолго. К счастью я ошибся, спустя пол года использования не появилось даже люфта. Могу сказать, что по ощущениям мощности этих двигателей вполне достаточно. При желании можно поднять напряжение питания и получить еще немного динамики.
Карданная передача использована от карданного вала ВАЗ-2101.
$20
Блок питания 12В 350Вт заказан в Китае, поскольку в ATX’овом блоке питания чуть меньшей мощности срабатывала защита даже при работе одного двигателя. Думаю эту защиту при желании можно легко отключить, но не стал заморачиваться. Китайский же тянет оба двигателя не напрягаясь.
$30
Шарниры ball joint – шарниры, передающие усилие мотор-редукторов на кресло. Не знаю как этот шарнир называется по-русски. Возможно шаровой шарнир. Первая мысль была использовать рулевые наконечники от автомобиля. Купил, попробовал — оказались слишком тугие и громоздкие. Затем решил сколхозить самодельные — оказались слишком большими зазоры. В результате заказал в том же Китае по $3 за штуку. Забавно, что когда я пытался найти такие шарниры в оффлайн, в конторе, специализирующейся на продаже подшипников, надо мной малость посмеялись и сказали что такое найти невозможно.
Пара автоматических выключателей для защиты от КЗ.
Автомобильное кресло с неизвестной родословной, и совершенно точно нелегкой судьбой.
Метизы, железо, провода, всякие мелочи вроде вениляторов, ХЗ сколько.
Игровой контроллер aka Logitech G25, компьютер, монитор и остальное уже было в наличии.
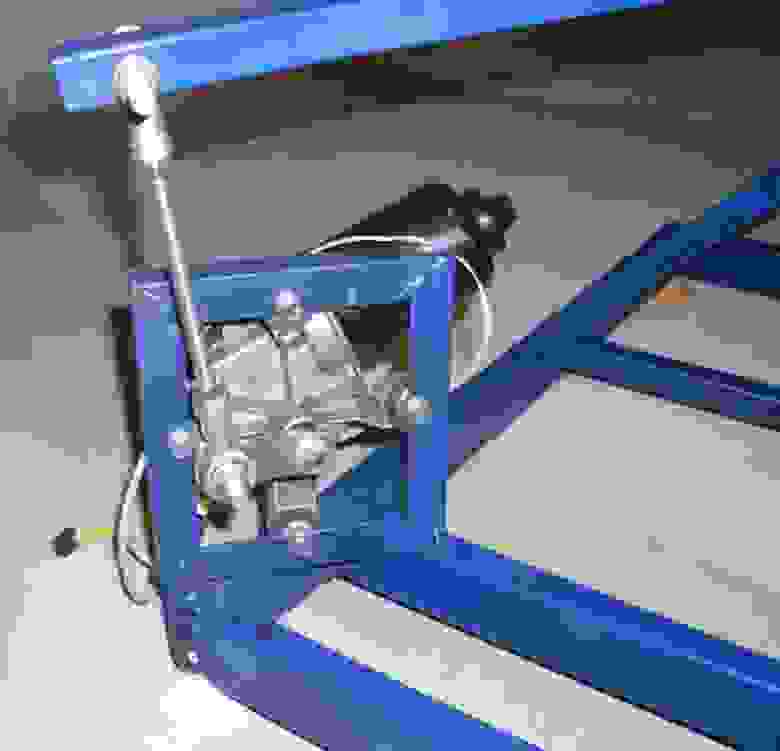
Несколко фотографий для понимания механической части. Крепление карданного шарнира и двигателей с упомянутыми выше ball joint. Заодно можете посмеяться над над моими скилами сварщика и маляра:

Электроника.

Некоторые места в схемах были исправлены уже на текстолите, так что не рекомендую повторять. Рисуем платы, расчехляем лазерный утюг, тапок для съемки. Получаем следующее:
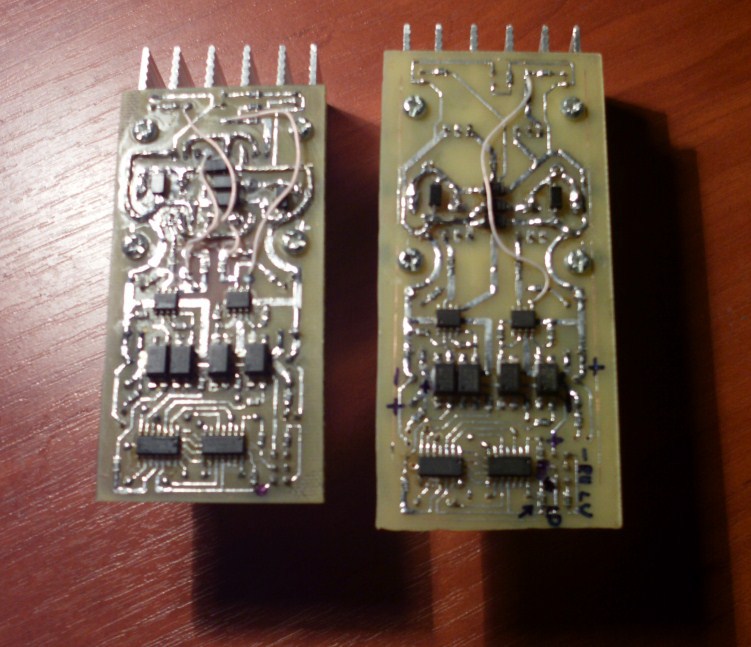
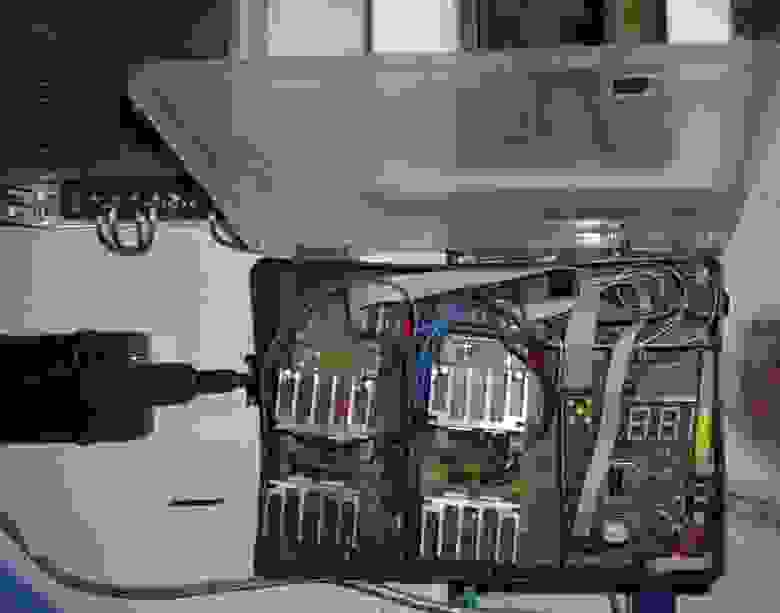
И упаковываем все в элегантный корпус:
Само собой не обошлось без косяков и в некоторых местах плату пришлось исправлять.
Необходимая для работы информация (задание положения двигателя) передается через переходник USB-Serial TTL на микросхеме cp2102 в контроллер. Контроллер реализован на МК atmega88 с минимальной обвязкой. Для удобства добавлен четырехразрядный семисегментный индикатор. Контроллер по сигналу обратной связи, датчиком которой выступает переменный резистор на оси мотор-редуктора, определяет фактическое положение двигателя и при необходимости вносит в него коррективы. В контроллере реализован пропорциональный регулятор. Прошивкой скорее всего не поделюсь, т. к. не люблю бэкапы. В драйверах двигателей реализован H-мост. Контроллер имеет возможность открыть любой из транзисторов моста, что в данном случае избыточно. Из-за этого пришлось городить логическую защиту от КЗ. Достаточно было бы передать из контроллера в драйвер сигналы направления и разрешения.
Рисуем остальные части совы Как то так все это выглядит если собрать вместе:

Софт для компьютера.
Для меня было откровением, что многие игры реализуют вывод телеметрии. Раньше я думал, что получить данные о физической модели игры можно только с помощью черной магии и метода научного тыка в память процесса. Оказывается нет, часто разработчики игр заморачиваются над выводом соответствующих данных через сокет. Отличное место чтобы изобрести еще один велосипед, а то я уже почти оправился от предыдущего. Но тут что-то пошлО не так и я решил посмотреть готовые варианты. А их есть как минимум два бесплатных:
X-Sim напичкана массой свистелок вроде возможности прикручивания плагинов, перехватывания состояния джойстиков, но сложна для старта. Список поддерживаемых игр.
SimTools относительно новая программа, значительно проще первой, но обладает меньшим функционалом. Для старта самое оно. Список поддерживаемых игр.
Обе программы допускают вывод необходимой информации через последовательный порт (в данном случае виртуальный). Поддерживаются практически все более-менее известные преимущественно автомобильные, но есть также и авиационные симуляторы.
Думаю в комплект к этому девайсу неплохо бы поиметь Oculus Rift. Только вероятно понадобится вторая версия, поскольку у первой гироскопы с ума сойдут.
Хочу извиниться перед теми, кто просмотрел все картинки, но так и не увидел синюю изоленту, и перед читателями, кто сюда дочитал, за пост вида КакНарисоватьСову.jpg. Изначально он не планировался, поэтому не вся информация о процессе изготовления сохранилась. Но по крайней мере статья расскажет о подобных устройствах тем, кто не задумывался об их существовании. Еще несколько видео с этой железкой есть в этом плейлисте.
Источник
Стойка игрового руля своими руками (часть 3 — подвижная).
Многие писали про реалистичность.. Вот, у меня руки зачесались.
Решил сделать платформу под кресло. Нашёл множество прототипов вроде этого:
Прикупил обучающий набор Arduino и понеслось. Экспресс курс и спустя полторы недели имеем вот это чудо.
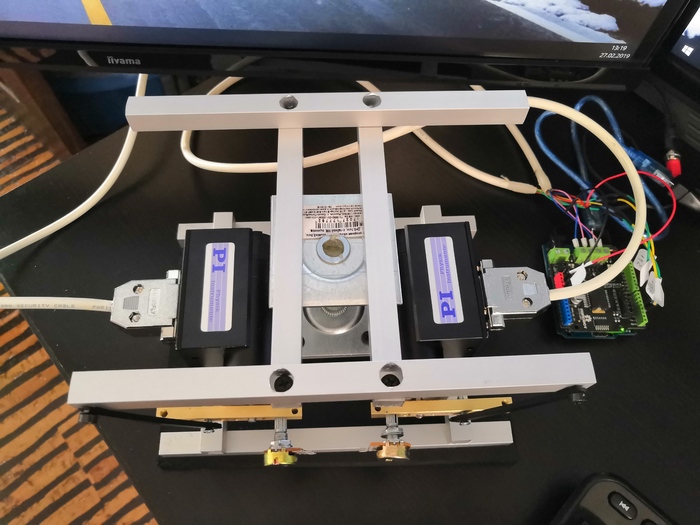
Оно даже шевелится и работает.
Это всего лишь модель, вдвое меньше нужного. Держит только вес книги.
Надо подобрать мотор-редукторы (как советуют — червячного типа). Известно разве что это: частота вращения на выходе — 50 об/мин, рабочий цикл
100%, питание 12-24В.
Вес конструкции с водителем 100-120 кг (на центральной опоре).
Пока разбираюсь с играми (телеметрия, Shared memory, UTP) и, параллельно, с ардуино. Благо язык знакомый. Но, есть нюансы. Контроллерами ранее не занимался, а тут надо быстродействие. Планирую заняться телеметрией.
Софт импортный есть, но у меня желание разобраться самому (тыжпрограммист).
Собственно обращение к пикабушникам — нужен совет по подбору момента (мощности) мотор-редуктора. Может кто уже сталкивался.
В плане электроники, то вот схема с зарубежных ресурсов:
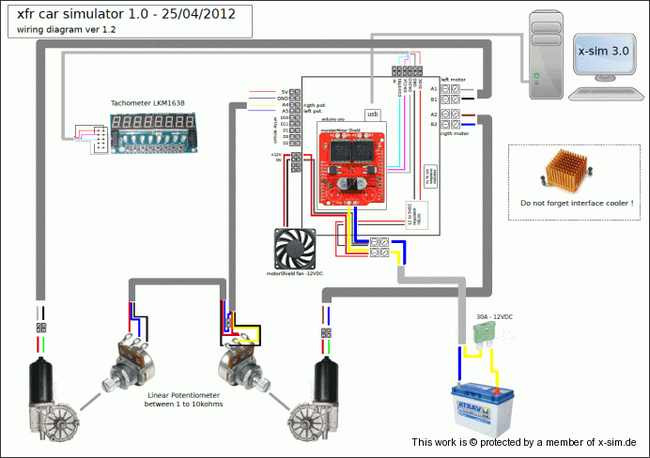
На зарубежных сайтах типа xsimulator много всего, но матчасть отсутствует.
На этом всё.
Найдены возможные дубликаты
А я думал что, при повороте тебя должно тянуть наружу радиуса, а не во внутрь. Или я не прав?
Полно-рамную конструкцию отмёл. Сделал seat mover.
Результатом доволен, работаю над софтом и корпусом для электроники.
Кому интересно, пишите в личку — буду пилить пост.
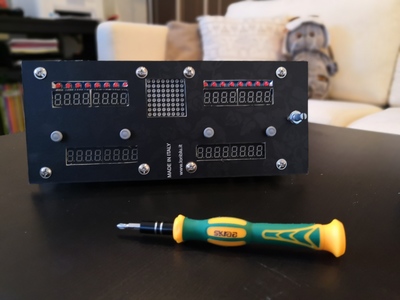
А пока фото самодельной панели приборов для гонок
Хорошо когда человек творит. Респектую. Главное руки не опускать. Я недавно собрал аппарат для напитков. Ооооочень топорно, всё дома на коленке. Смотрится фаршмачно но главеное что он работает. А самое главное понял что если что-то взялся делать то лучше не опускать руки. Делай, чувак, буду наблюдать.
Да, на коленках собирать это то ещё удовольствие.. Но, мастерской дома нету, к сожалению. Только холодная лоджия..
О, чувак, у тебя есть лоджия! Шикуете бояре))) Я дома электролобзиком корпус пилил для своего аппарата)) Я в 7 заканчиваю работать и дома в полвосьмого появляюсь и старался до 9 вечера всё быстренько пилить что бы не шуметь долго и люди с работы отдыхали. Из за скорости всё очень криво получилось)) Но буду делать ещё один аппарат и решил что дома шуметь уже не буду, не только из за того что поздно вечером но ещё потому что нет нормальных инструментов. Нашёл знакомого у которого столярка. Буду к нему обращаться.
— нужна тонкая настройка моторов;
— кратковременные превышения по току
— прогиб стойки (она для напольного использования только хороша);
— пока всё скрипит и гремит)
Исходя из законов физики необходимую мощность двигателя можно оценить:
g=9.8 м/с^2, массу тела m, нужно поднять на h сантиметров за t секунд.
мощность двигателя P=g m (h*0.01) / t
К примеру для m=100 кг, l=1 см и t=1 сек P будет 10 Вт,
для 10 см и 0.1 сек. P=1 кВт.
Далее умножаем где то на 2 для компенсации КПД, потерь в редукторе и механизме.
Редуктор рассчитываем, что бы при максимальной скорости перемещения были оптимальные обороты.
Привет! Очень загорелся собрать активное кресло, но в програмировании и и электрики можно сказать я полный ноль! хотелось бы попоросить тебя о помощи мне в этом!
Если есть желание помочь, откликнись пожалуйста в VK https://vk.com/id70195779 . Заранее спасибо.
Привет! Очень загорелся собрать активное кресло, но в програмировании и и электрики можно сказать я полный ноль! хотелось бы попоросить тебя о помощи мне в этом!
Если есть желание помочь, откликнись пожалуйста в VK https://vk.com/id70195779 . Заранее спасибо.
Это дорого. Умельцы делают стойки SFX 100 ( https://www.youtube.com/watch?v=mUyURD8yrEQ ). Полное описание и модели для 3D печати есть.. Тоже дорого, даже самому делать. И не на коленках, а в мастерской.
На такой трясучке весь позвоночник высыпется и удовольствие вряд ли будет после получаса игры
Можно же и подрегулировать: комфорт, нормальный, спорт)
Большая часть стоимости это моторы, блоки питания, затем Sabertooth и сварка каркаса.. Посмотрим..
Я DC планирую. Смотрю в сторону Transtecno. Симпатичные серии Robin, но есть сомнения на счёт мощности..
Вот такого типа приблизительно:

Согласен. Подкупает своей простотой.На зарубежных сайтах типа xsimulator net много самодельных проектов. От 2DOF до 6DOF
2000$ это дорого. Надо постараться дешевле.


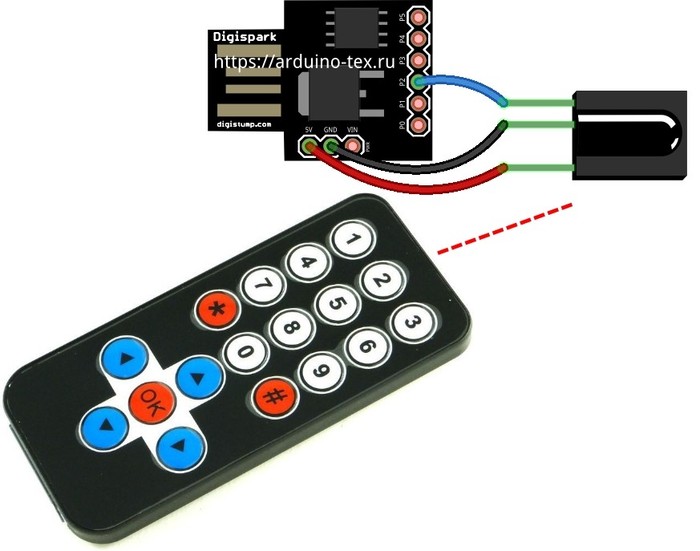
Беспроводной пульт для презентаций своими руками
Сегодня хотел бы поделиться информацией, как можно собрать беспроводной пульт для презентаций. Про беспроводное управление компьютером рассказывал в предыдущей публикации.
После чего решил сделать прошивку, которая подойдет для реализации пульта для управления презентацией.
Управлять можно не только презентацией, но и медиафайлами и уровнем звука.
Также можно управлять курсором мыши, что придает пульту большую универсальность и область применения.
Управлять с помощью пульта можно:
• Открытие и просмотр документов,
При желании функционал можно урезать или расширить.
Надеюсь моя информация будет полезной.
Спасибо! Всем добра!
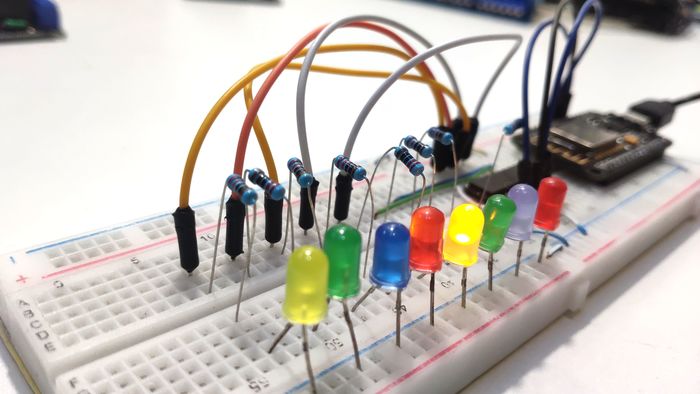
Увеличение количества пинов NodeMCU с помощью сдвигового регистра
Так как у NodeMCU не так и много пинов для подключения периферии, часто возникает нехватка pin. Поэтому такую замечательную отладочную плату откладываем на полку и ищем другие железки для реализации проекта.
Но в некоторых случаях можно расширить количество пинов с помощью сдвигового регистра и реализовать проект на NodeMCU.
Все исходные материалы к уроку можно найти на сайте>>
Надеюсь моя информация будет полезной.
Спасибо! Всем добра!
Дисплей Nextion и NRF24 беспроводное управлении реле
Я уже вкладывал уроки про дисплей Nextion. В которых рассказывал, как можно организовать контроль доступа. Сегодня в проекте рассмотрим более расширено применение полученных знаний из уроков.
С помощью радио модуля NRF24 беспроводным способом (по воздуху) будем управлять реле. Включать и выключать можно различную нагрузку: свет, отопление, вентиляцию и пр.
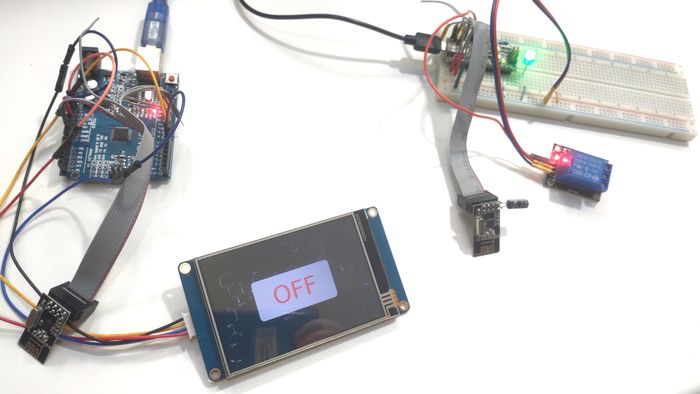
На основе данной системы можно сделать беспроводное управление освещением в доме.

Надеюсь моя информация будет полезной.
Спасибо! Всем добра!
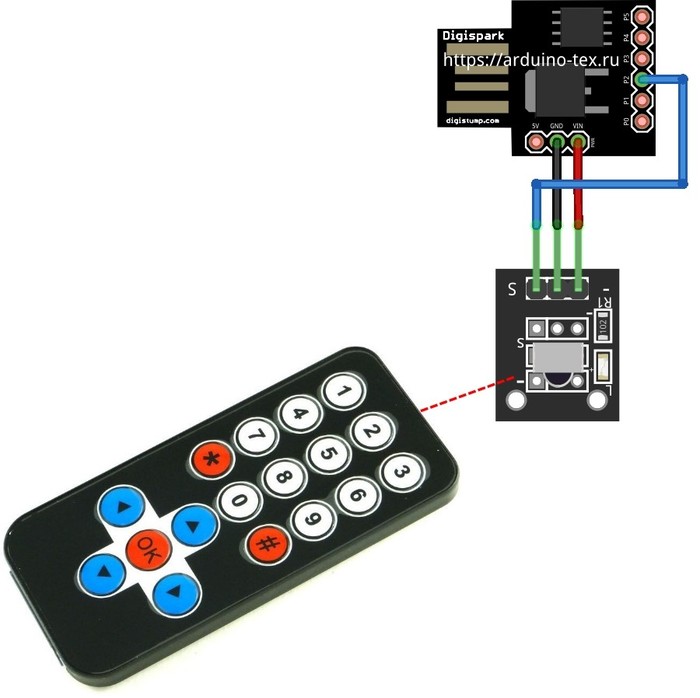
Самое простое дистанционное управление компьютером
Сегодня расскажу, как я делал удалённое управление ПК с помощью пульта ДУ. Реализовывал я это года 3-4 назад для переключения мультиков для ребёнка на YouTube.
Когда я сидел за компьютером, а ребенок смотрел мультики в другом конце комнаты. И чтобы не вставать постоянно для переключения мультфильмов. Сделал вот такую леньтяйку.

Сегодня данным проектом решил поделиться с вами.

Так выглядит переключение композиций в ВК. А также регулирование громкости.
Надеюсь моя информация будет полезной.
Спасибо! Всем добра!


Как сделать тетрис классический
Дисплей от Nokia 5110 — это наверное самый дешевый дисплей который можно найти для своих проектов на Arduino. На базе него мы разберемся с вопросом: «Как же сделать тетрис-игру?@
Основная проблема всех библиотек для рисования на этом дисплее — отсутствие поддержки русского языка. Решается установкой дополнительных шрифтов, которые подменяют английские символы на русские.

Избалованные i2c шиной скажут «фу», ведь у нас 4 провода управления SCLK, DIN, DC, CE и RTS которые соответственно подключаются к Arduino, 3, 4, 5, 6, 7. Не забываем подключить питание 3.3 вольта, и землю.
Для рисования будем использовать библиотеку Adafruit GFX Library. В архиве с ней есть примеры использования.
Для управления игрой используем ИК пульт от телевизора. Сигнал будет принимать датчик TL1838.
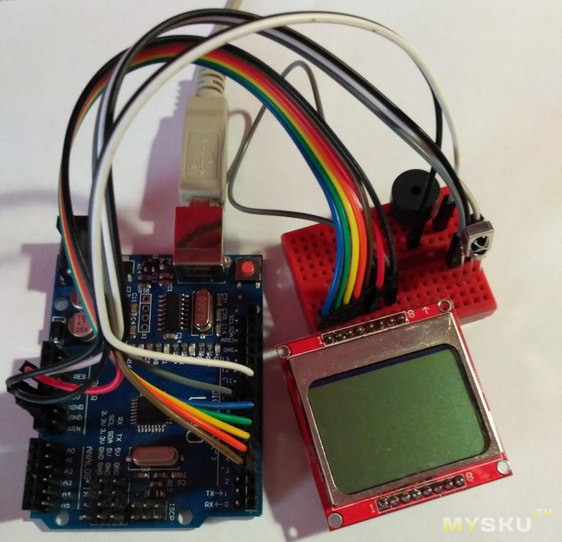
Я использовал Arduino Uno, т.к. она уже имеет стабилизатор на 3.3 вольт.
Подключение IR приемника:
pin 8 — IR (управляющий). Питание на +5V и GND.
pin 9 — speaker, Земля на GND.
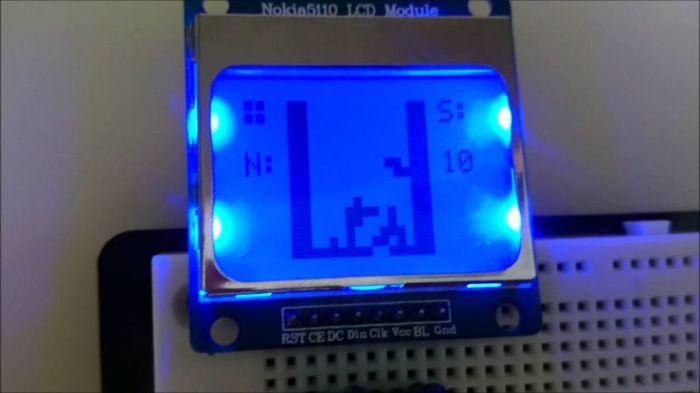
При «проваливании» на собранную строку будет воспроизводиться писк. Он реализован на особенности нескольких пинов Ардуино (в нашем случае 9) выдавать ШИМ с заданной частотой. Игра поддерживает все атрибуты нормальной игры. Ту и подсказка следующей фигуры и текущий счет. Игра ведет учет рекордов. Это значение хранится в энергонезависимой памяти Ардуино. Чтобы сбросить рекорд, достаточно изменить в скетче значение flfirst=1234 на любое другое. В игре также идет автоувеличение скорости падения через каждые 30 списанных строчек, так что, бесконечно долго поиграть не получится ). Скетч не оптимизировался и тщательно не прогонялся, а был написан на досуге в свое удовольствие. Если кто обнаружит ошибку — пишите. О ©. Скетч разрешается править для себя как угодно. Только при публикации где-либо своих вариантов ссылку на первоисточник-муську указывайте ). Для чего делал — длинные выходные + «из любви к искусству». Была бы дочка маленькой, сделал бы ей, наверное, мини игровой автомат для кукольной комнатки на 8 марта, как раз успел бы. Добавил бы несколько игр типа Змейки и Арканоида, а корпус вырезал бы из текстолита, наверное. Только дочка в этом году уже докторскую защищает, так, что мимо, но может кому еще эта идея пригодится ).
Источник