Аппарат ультразвуковой левитации под управлением Aрдуино



В-третьих, звук — это вибрация, которая распространяется через среду, например, газ, жидкость или твердый объект. Если ударить в колокольчик, он завибрирует в воздухе.
* В утверждении авторов есть спорные моменты, но это их личное мнение.
Акустический левитатор состоит из двух основных частей — преобразователя, который представляет собой вибрирующую поверхность, издающую звук, и отражателя. Часто преобразователь и отражатель имеют вогнутые поверхности, помогающие сфокусировать звук. Звуковая волна распространяется от преобразователя и отражается от отражателя. Свойства этой бегущей отражающей волны помогают ей «подвешивать» объекты в воздухе.
Когда звуковая волна отражается от поверхности, взаимодействие между ее сжатием и разрежением вызывает интерференцию. Сжатия, которые встречаются с другими сжатиями, усиливают друг друга, а сжатия, которые встречаются с разрежением, уравновешивают друг друга. Иногда отражение и интерференция могут образовывать стоячую волну. Кажется, что стоячие волны движутся вперед и назад или колеблются сегментами, а не перемещаются с места на место. Эта иллюзия неподвижности и дает название стоячим волнам.
Стоячие звуковые волны имеют определенные узлы или области минимального давления и пучности или области максимального давления. Узлы стоячей волны являются причиной акустической левитации.
Размещая отражатель на правильном расстоянии от преобразователя, акустический левитатор создает стоячую волну. Когда ориентация волны параллельна силе тяжести, части стоячей волны имеют постоянное давление вниз, а другие — постоянное давление вверх. Помещая между ними какой-то небольшой легкий предмет, мы и имеем эффект левитации.

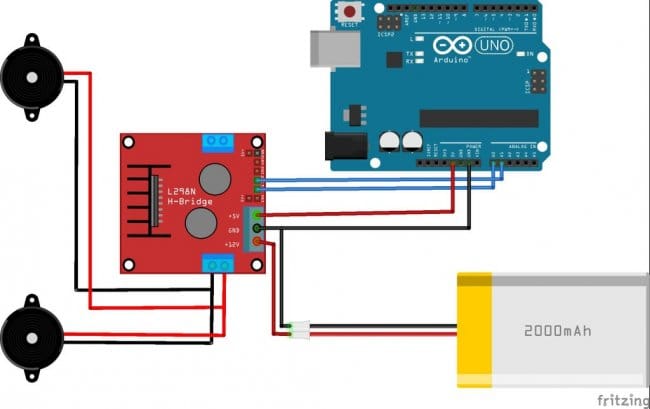
Шаг второй: схема
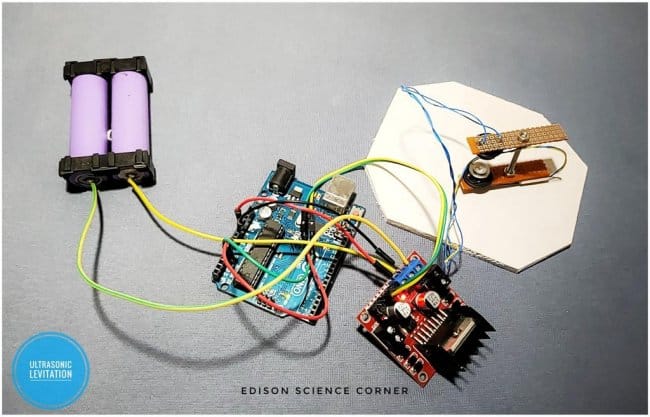
Принцип работы схемы очень прост. Основным компонентами этого проекта является Arduino, драйвер двигателя L298 и ультразвуковой преобразователь, собранный из модуля ультразвукового датчика HCSR04. Как правило, ультразвуковой датчик передает акустическую волну на частоте от 25 кГц до 50 кГц. Эти ультразвуковые волны создают стоячие волны с узлами и пучностями.
Рабочая частота данного ультразвукового преобразователя составляет 40 кГц.
Итак, цель использования Arduino состоит в том, чтобы генерировать высокочастотный колебательный сигнал 40 кГц для ультразвукового датчика или преобразователя, и этот импульс подается на вход IC L293D драйвера двигателя (от контактов Arduino A0 и A1 ) для управления ультразвуковым преобразователем. В результате ультразвуковой преобразователь производит акустические звуковые волны.
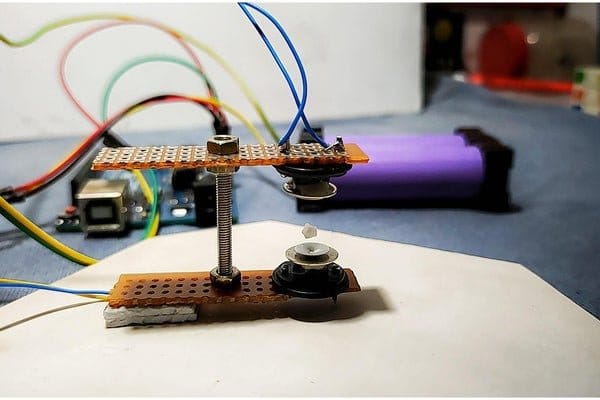
Шаг третий: изготовление преобразователя
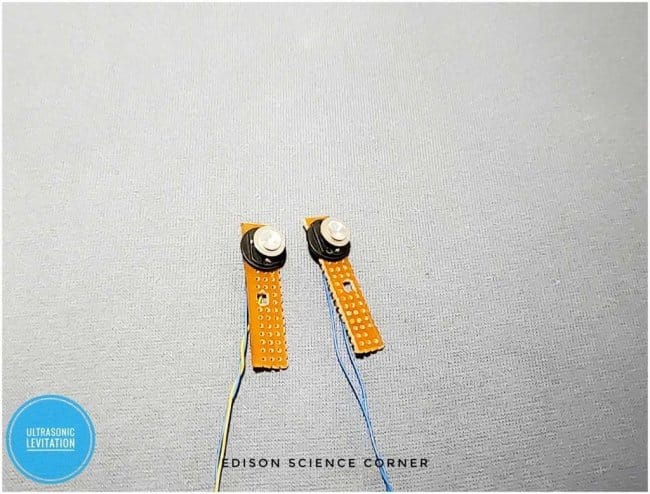
Сначала нужно демонтировать ультразвуковые датчики. Затем нужно снять защитный колпачок и нарастить провода.
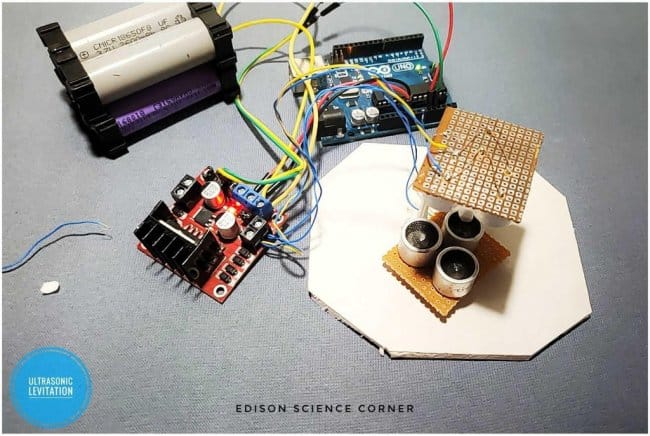
Дальше отрезаем две пластинки от платы. Сверлим отверстие под винт. Ультразвуковые датчики размещаем на концах плат.
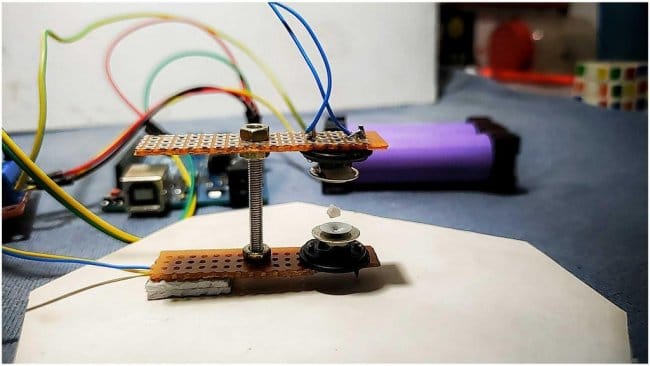
Положение ультразвуковых преобразователей очень важно. Они должны быть обращены друг к другу и они должны находиться на одной линии, чтобы ультразвуковые звуковые волны могли распространяться и пересекаться друг с другом в противоположных направлениях.

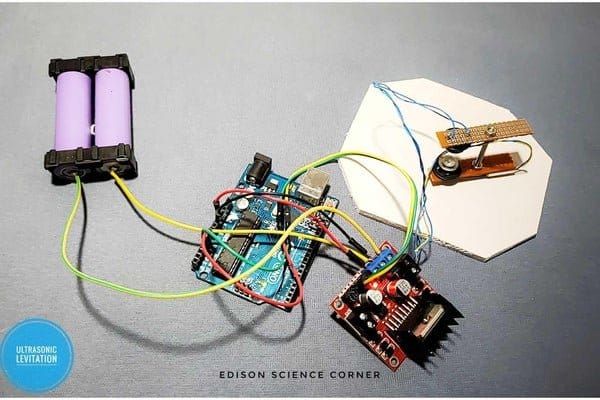
Шаг пятый: работа аппарата и улучшения
Размещение датчика очень важно, поэтому нужно постараться установить его в правильном положении.
Мощность устройства небольшая и «работать» оно будет только с небольшими легкими предметами, например, бумагой или пенопластом.
Для питания устройства нужен ток не менее 2 А.
Устройство рабочее, а вот попытка сделать более мощный аппарат, для более тяжелых предметов, не удалась.
Работу устройства, а также его сборку можно посмотреть на видео.
Источник
Легкодоступная левитация в ультразвуке

Привет, Хабр. В этой статье я расскажу о простом устройстве для демонстрации акустической левитации из доступных компонентов. В статье много фотографий и ссылка на видео с экспериментами.
Впрочем, я всего лишь повторил готовое устройство, описанное в этой статье.
Краткая информация по устройству и эксперименты с левитацией показаны в моём видео (эксперименты начинаются с 2:00).
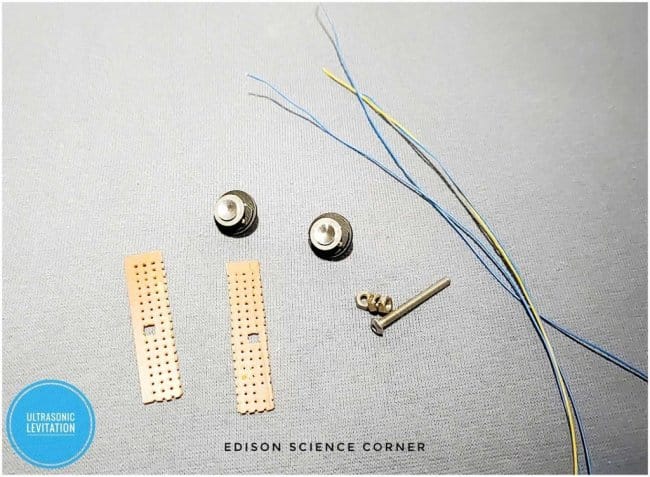
Самым главным элементом этого устройства являются ультразвуковые пьезоизлучатели, которые можно взять из достаточного популярного ультразвукового датчика расстояния (на алиэкспрессе искать по запросу «ultrasonic distance HC-SR04» по цене 70 руб).

В этом датчике два одинаковых элемента. Один работает как генератор ультразвука, а второй как приёмник. Чтобы их выпаять, лучше всего использовать оловоотсос.
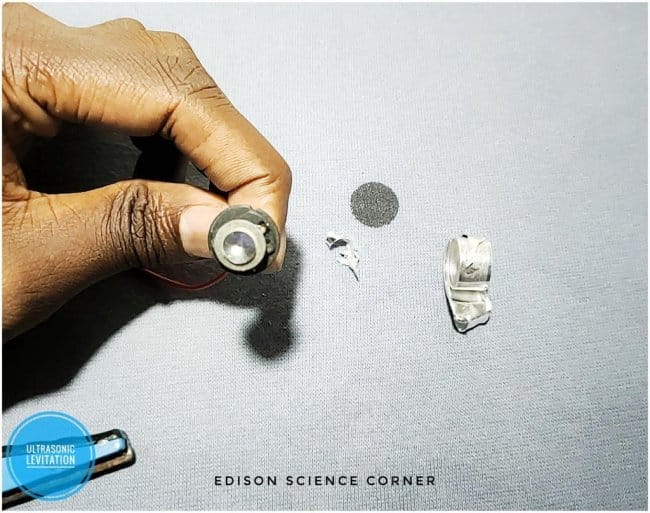
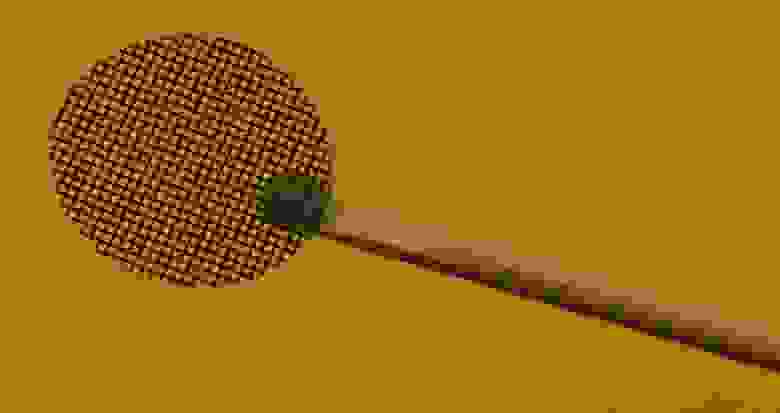
Далее нужно вынуть сетку, чтобы уменьшить потери при генерации. Для этого нужно развернуть обжим алюминиевого корпуса с помощью кусачек или плоскогубцев.

Из вынутой сетки можно сразу сделать лопатку для установки частиц в наш «левитатор». Для этого нужно немного подрезать спичку или зубочистку и приклеить к ней сетку суперклеем. Края сетки лучше немного подогнуть.
На поверхности пьезоизлучателя, который был приёмником, есть капля желеподобного клея. Предположительно, это сделано для лучшего поглощения ультразвуковой волны. Эту каплю желательно снять небольшой отвёрткой.

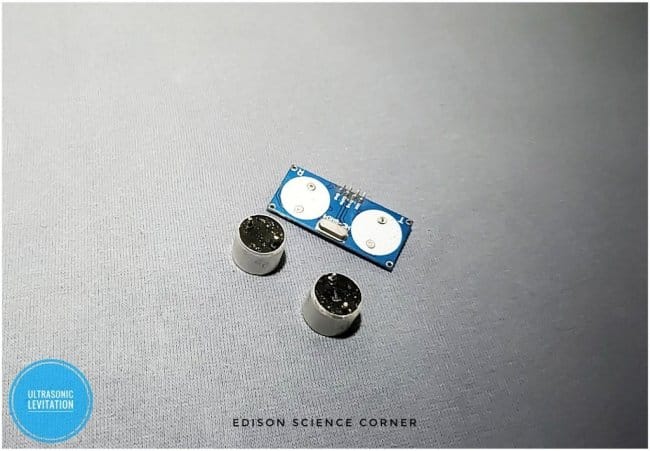
Далее излучатели собираем без сеток, обжав край корпуса плоскогубцами в нескольких местах.
Теперь у нас есть два ультразвуковых излучателя. Их нужно спаять параллельно и подключить к схеме, которая выдаёт прямоугольный переменный сигнал с амплитудой 12 В и частотой 40 кГц, или, другими словами, импульсы напряжения от -12 В до +12 В.
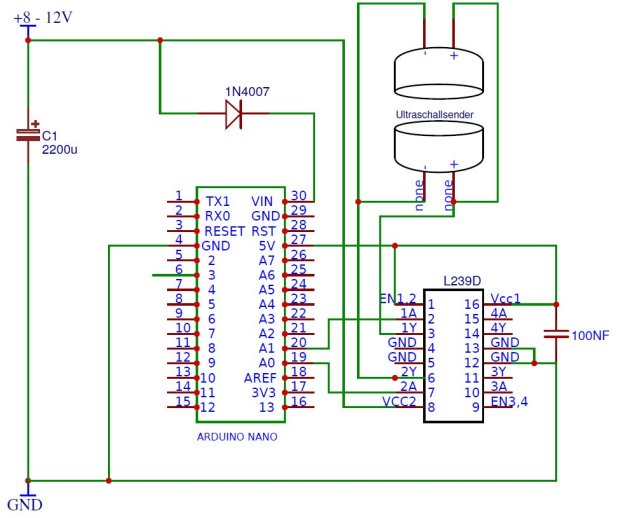
Схема ниже взята из оригинальной статьи. В ней используется драйвер шагового двигателя L239D. При этом в тексте говорится о драйвере L293D (цифры поменялись), который более распространён. Можно купить готовую плату на драйвере L298N (искать по запросу «motor drive board L298N», по цене около 120 рублей). Я использовал просто мостовую схему на транзисторах для переключения полярности на моторе и так тоже хорошо работает. Но проще купить готовую плату с драйвером L298N. Также нужно купить плату Arduino Nano, которая создаёт нужную частоту 40 кГц, и источник питания на 12 В (достаточно тока 1 А). Программа для Arduino есть в исходной статье. В итоге, схема должна выдавать импульсы напряжения ±12 В с частотой 40 кГц.

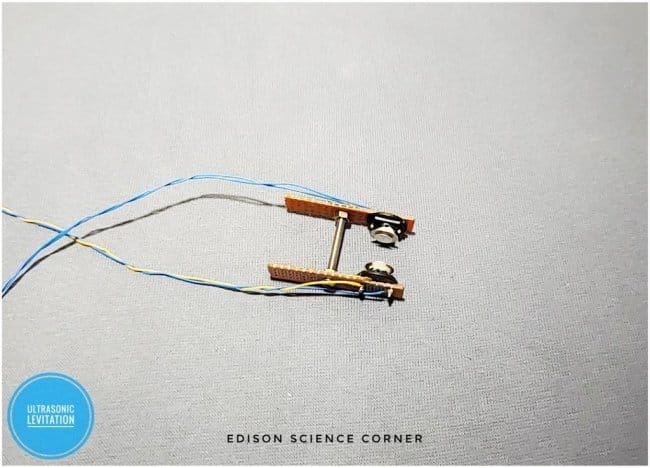
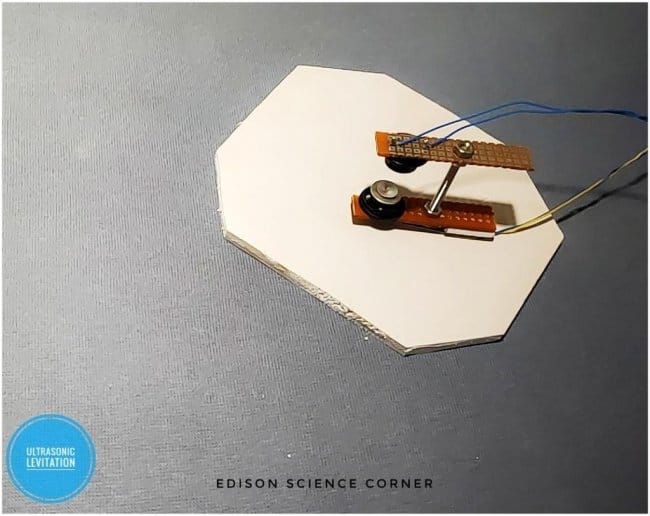
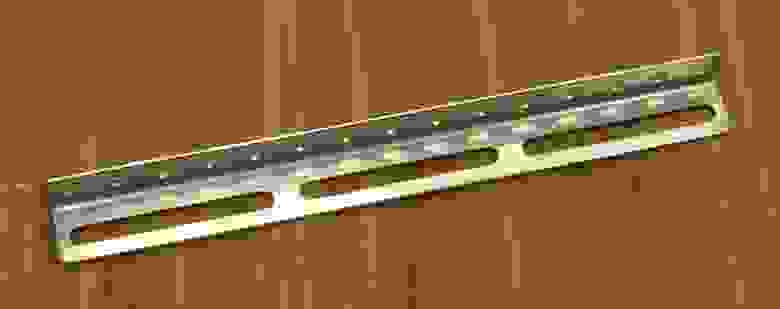
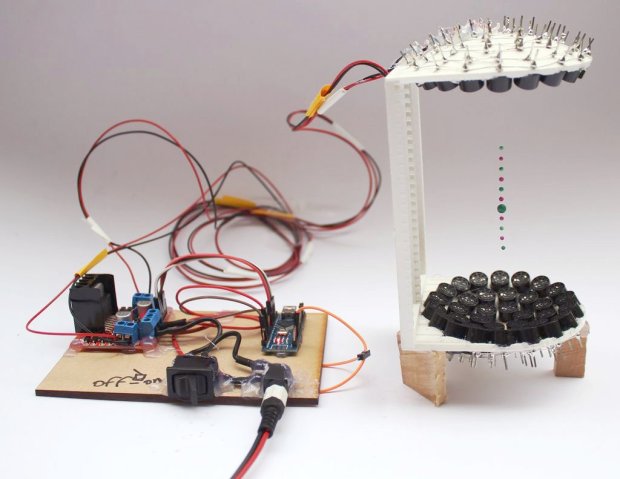
После сборки схемы нужно установить пьезоизлучатели встречно друг на друга, оставляя возможность изменять расстояние между ними. Я использовал металлический конструктор, в котором нашлась интересная деталь с продольными вырезами под винты. Не помню из какого набора эта деталь, так как давно покупал наборы отечественных и импортных производителей (винты М4, шаг отверстий 10 мм) и сложил их все в одну кучу.
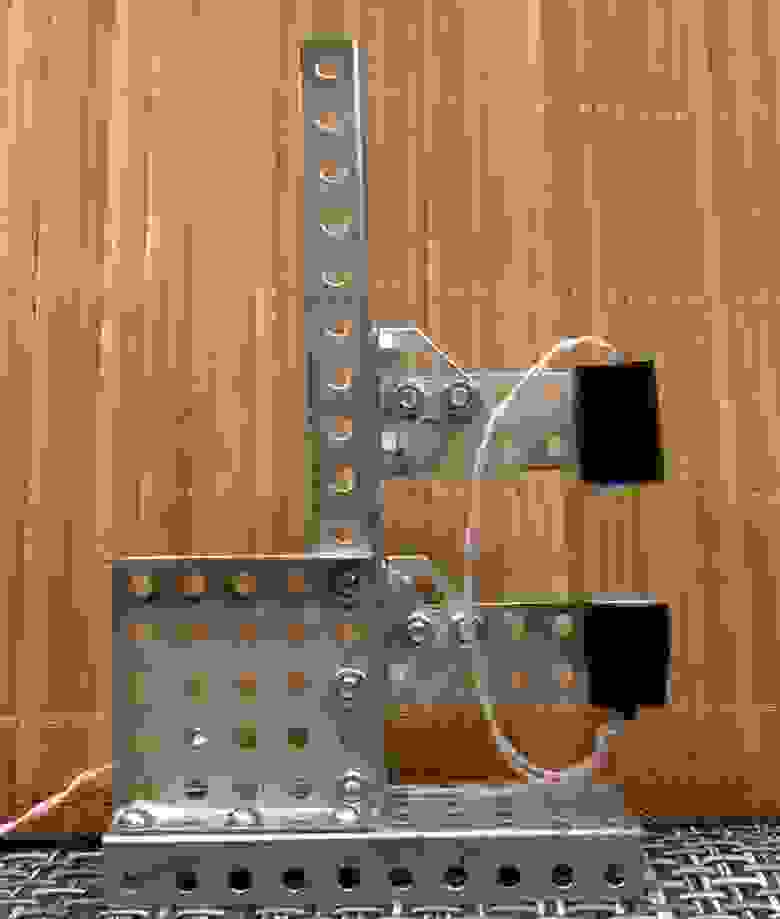
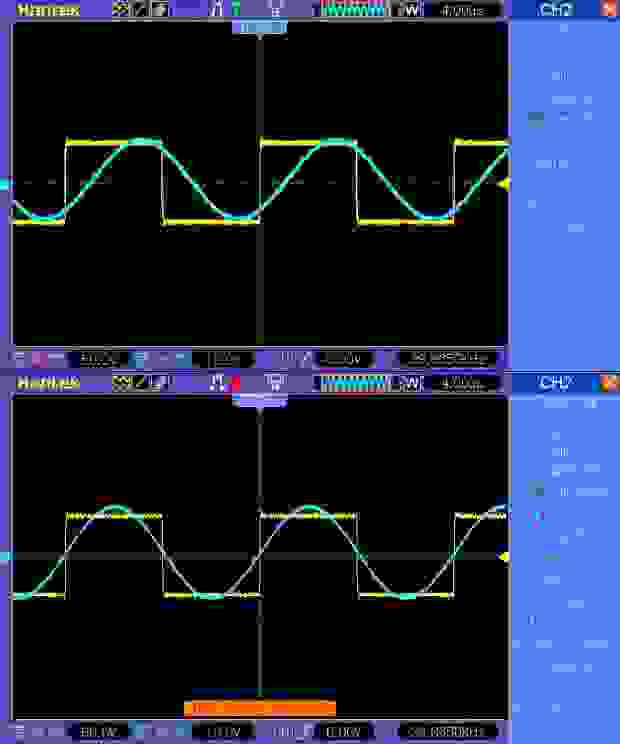
Я подбирал расстояние начиная с 25 мм. Постепенно уменьшал его по пол миллиметра и проверял, как висят частицы пенопласта. Остановился на 22 мм, при этом частицы висели лучше всего. В оригинале статьи есть способ поиска оптимального расстояния с помощью осциллографа. Если один пьезоизлучатель временно отключить от генератора, то он становится приёмником и выдаёт синус. Нужно совместить его по фазе с прямоугольным сигналом генератора.
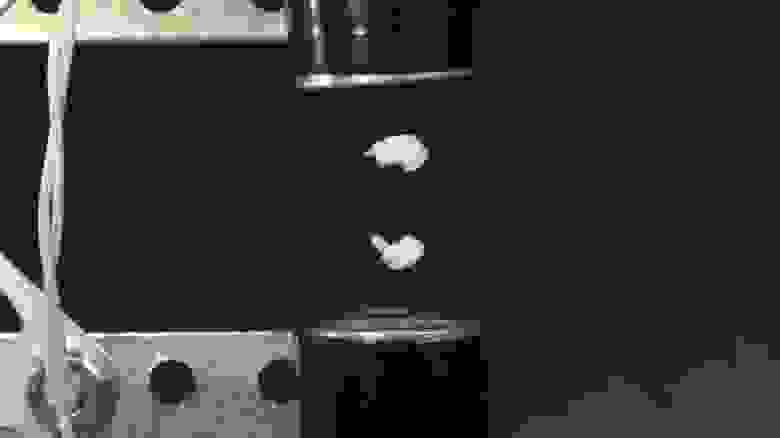
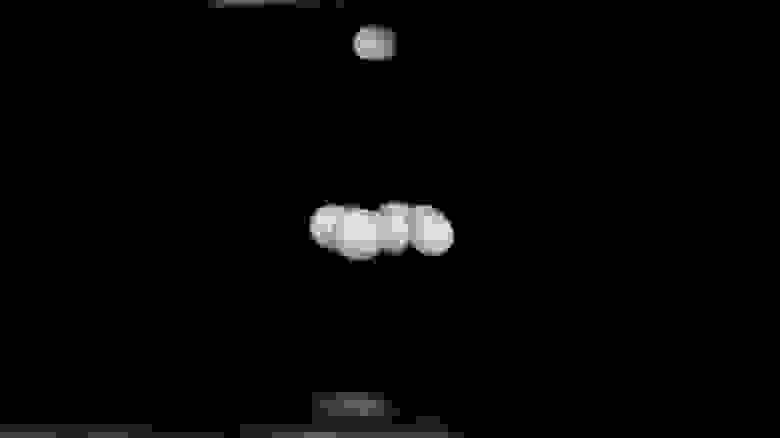
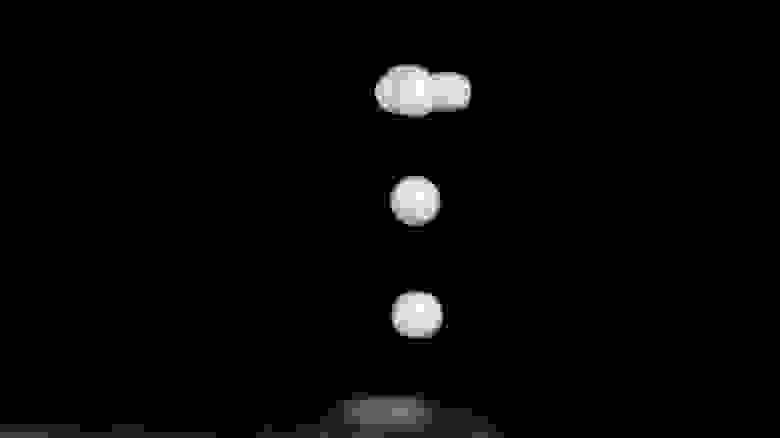
Когда оптимальное расстояние найдено, можно начинать эксперимент. Для этого нужно приготовить небольшие лёгкие частицы: шарики от пенопласта (также искусственный пенопластовый снег), кусочки салфетки, бумаги и тонкой фольги (поталь), новогодние украшения типа «дождик», крупные блёстки. С помощью лопатки из сетки нужно их поднести в область между пьезоизлучателями и опустить лопатку. Частица будет захвачена в один из узлов стоячей волны. Эти узлы находятся на расстоянии примерно 4 мм друг от друга. Можно заносить сразу несколько частиц. В зависимости от размеров и формы, частицы могут висеть неподвижно, колебаться или крутиться.
Как ни странно, пока ещё на алиэкспрессе нет этого устройства в готовом собранном виде в красивом корпусе. Но есть набор для самостоятельной сборки более мощного левитатора из 75 пьезоизлучателей (искать по запросу «Acoustic Levitator», цена около 5000 рублей за несобранную версию). Про этот большой левитатор есть целая научная статья.
Всем спасибо за внимание, надеюсь статья будет полезна. Счастливой левитации!
Источник
Акустическая левитация своими руками
Сегодня я расскажу и покажу, как в домашних условиях повторить эффект ультразвуковой левитации своими руками.
В предыдущих статьях раз, два. Я демонстрировал псевдо левитацию. В этот раз все по настоящему. Начну с теории.
Звуковые колебания
Чтобы понять всю суть эффекта левитации, нужно понять, что такое звуковая волна и стоячая волна.
По этому я начну с них. Акустическая волна распространяется во все стороны и состоит из двух полуволн, положительной и отрицательной. Положительная полуволна представляет из себя зону сжатия или повышенного давления, в дальнейшем я буду ее называть компрессионная, а отрицательная полуволна зону разряжения, назовем ее декомпрессионная.

На практике это выглядит так: Диффузор динамика при движении наружу создает компрессию, а при движении во внутрь декомпрессию. На изображении это наглядно показано.

Максимальная сила волны создается около диффузора динамической головки и в процессе отдаления от излучателя постепенно теряет свою мощность, чем дальше от динамика тем она слабее.
Стоячая волна — это волна, которая образуется при наложении двух встречных, совпадающими по фазам и с одинаковой частотой волн. Если обычная волна теряет свою мощность в процессе распространения в пространстве, то стоячие волны на не больших расстояниях образуют узлы с примерно равной мощностью. Достигается это за счет складывания разнонаправленных волн. Слабеющая волна усиливается за счет встречной волны. Чтобы понять как это происходит, посмотрите на изображение ниже. Серым цветом выделены узлы или в нашем случаи полки из стоячих волн. На этих полках(узлах) и удерживаются предметы.

Длина волны — это скорость звука разделенная на частоту колебаний. При температуре 20°C и влажности воздуха 50%, звук распространяется в такой среде со скоростью 340 м/с. Резонансная частота колебаний нашего пьезоизлучателя примерно 40 000 Гц. В итоге получаем длину волны 340000 мм / 40000 Гц = 8,5 мм. Длина стоячей волны будет такой же 8,5 мм.
Излучатели можно располагать на разном расстоянии друг от друга, но оно всегда должно быть кратным длине волны. Чем меньше расстояние между излучателями, тем мощнее узлы стоячей волны. Чем больше пространства между акустическими трансмиттерами, тем больше узлов между ними, но слабеет мощность узлов и наоборот. Так же нужно понимать, что для удержания большого количества предметов в узлах волн и на большем отдалении между ультразвуковыми излучателями, потребуются более мощные пьезо головки. Например от автомобильных парковочных радаров, или от бытовых увлажнителей. В этой статье я рассматриваю самый доступный и бюджетный ультразвуковой излучатель. Который можно выпаять из дальномера HC-SR04.
Схема подключения — я использовал Ардуино нано и драйвер моторов MX1508, можно было бы обойтись генератором NE555, а в качестве усилителя для излучателей использовать микросхему MAX232 которая установлена на дальномере HC-SR04, но я для себя избрал более простой путь, который сэкономил мне время. Так как на сборку акустического левитрона у меня ушло не более 5 минут. Соединения я произвел набором проводов dupont.

Описание скетча Ардуино
Код ничего особенного из себя не представляет. Все сводится к настройке таймера и дерганий ногами порта D Arduino. Для этого переводим Timer1 в режим сброса при совпадении(CTC) и теперь при совпадении значений регистра счета TCNT1 с заданным числом в регистре сравнения OCR1A, будет срабатывать прерывание, в обработчике которого выполняется инверсия всего порта D. После чего счетный регистр обнулитcя и после выхода из обработчика процесс счета запустится по новой.
Нужное нам значение регистра OCR1A рассчитывается следующим образом: так как делитель в регистре TCCR1B выключен, то мы берем частоту тактового генератора 16 000 000 Гц и делим на требуемую нам частоту срабатывания прерывания 80 000 Гц, в результате получаем число 200, это и будет наше значение для регистра OCR1A.
Почему 80 кГц, а не 40 кГц, спросите Вы? Потому, что период в обработчике формируется за два срабатывания прерывания. При первом срабатывании на выходах формируется D3=0 и D4=1, а при втором D3=1 и D4=0.
Источник