- Драйвер чипа CH340 USB-Serial
- Список поддерживаемых плат
- Зачем нужен драйвер?
- Установка драйвера
- Digitrode
- цифровая электроника вычислительная техника встраиваемые системы
- Светодиодный драйвер на основе Arduino и полевых транзисторов своими руками
- Драйвер светодиодной ленты на Arduino и MOSFET своими руками
- Arduino своими руками с USB портом
- Драйверы двигателя L298N, L293D и Arduino Motor Shield
- Драйвер двигателя в проектах ардуино
- Для чего нужен драйвер двигателя?
- Микросхема или плата расширения Motor Shield
- Принцип действия H-моста
- Драйвер двигателя L298N
- Распиновка микросхемы L298N:
- Драйвер двигателя L293D
- Драйвер двигателя на микросхеме HG7881
- Характеристики драйвера HG7881:
- Распиновка:
- Сравнение модулей
- Подключение L298N к Arduino
Драйвер чипа CH340 USB-Serial
При подключении платформ разработки на базе Arduino к компьютеру, вы связываете между собой два мира: микроконтроллерный и микропроцессорный.
Стандартным интерфейсом плат Arduino на микроконтроллерах ATmega328P является UART, а у современных компьютеров используется USB. Чип USB-UART CH340G служит мостом между микроконтроллером и USB-портом компьютера, который позволяет загружать прошивку в плату, а также передавать между собой данные.
Список поддерживаемых плат
Зачем нужен драйвер?
При подключении любого устройства к USB-порту компьютера необходимо подсказать операционной системе, как с ним общаться. На стороне компьютера таким переводчиком является специальная программа, называемая драйвером. Например, драйвер преобразователя USB-UART работает в режиме эмуляции последовательного COM-порта. Т. е. при подключении вашей платы к компьютеру чип моста с помощью драйвера попросит операционную систему открыть виртуальный COM-порт, через который начнётся общение между платой и ПК.
Каждый производитель делает свои чипы с соответствующими драйверами. К сожалению, не все драйверы предустановлены в операционных системах по умолчанию. Когда нужного драйвера нет, ОС пытается найти его для нового подключённого устройства, не находит, и вместо виртуального COM-порта вы видите надпись «USB 2.0 SERIAL» или «Неизвестное устройство». Для решения проблемы скачайте и установите драйвер для вашей операционной системы.
Установка драйвера
Рассмотрим установку драйвера на примере платы Iskra Uno в операционной системе Windows. С остальными платами ситуация будет аналогичная.
Источник
Digitrode
цифровая электроника вычислительная техника встраиваемые системы
Светодиодный драйвер на основе Arduino и полевых транзисторов своими руками
Драйвер светодиодной ленты на Arduino и MOSFET своими руками
Светодиодными лентами и мощными светодиодами нельзя так просто управлять с помощью простых цифровых выводов микроконтроллера, которые не обеспечивают достаточного тока для этих целей. В данном случае нужно использовать схему драйвера.

В этом материале вы узнаете, как создать собственный драйвер на основе Arduino и MOSFET (полевых транзисторов) для любого более мощного устройства, такого как светодиодная лента, двигатель постоянного тока высокой мощности и т. д. Здесь мы используем MOSFET для управления работой светодиодной ленты.
Схема, показанная на следующем рисунке, основана на плате Arduino Uno, транзисторах MOSFET и нескольких других компонентах. Схема разделена на две основные части: блок питания и блок управления.

Цепь питания рассчитана на использование понижающего трансформатора и фиксированного стабилизатора напряжения на 12 В. Входное напряжение от сети переменного тока подается на первичную обмотку трансформатора, 15 В переменного тока имеется во вторичной цепи. Эти 15 В переменного тока выпрямляются с помощью мостового выпрямителя, созданного на основе четырех выпрямительных диодов, например, 1N4007. Этот выпрямленный постоянный ток фильтруется с использованием высокоэффективного электролитического конденсатора С1 (1000 мкФ) и подается на вход микросхемы стабилизатора напряжения 12В (MC7812ACTG). Сигнал 12В и 2А доступно на выходе 7812, и он подается на вывод питания светодиодной ленты.
Схема управления основана на плате Arduino Uno. Здесь мы используем три вывода ШИМ платы Arduino (контакты 5, 6 и 9, но вы можете использовать любой вывод ШИМ). Мы используем вывод ШИМ вместо обычного цифрового вывода, потому что МОП-транзистор является устройством контроля напряжения, то есть напряжение на затворе (G) определяет уровень проводимости. Контакт ШИМ может выдавать различное напряжение в диапазоне от 0 В до 5 В с шагом 255. Это необходимо для управления интенсивностью свечения светодиодов.
Схема драйвера рассчитана на три полевых МОП-транзистора для трех разных светодиодов (красный, зеленый и синий). Контакты Arduino 5, 6 и 9 подключены к трем затворам MOSFET-транзисторов, как показано на принципиальной схеме. Три отдельных резистора по 5,6 кОм заземляют вывод затвора всех этих MOSFET. Сток (S) всех этих полевых МОП-транзисторов заземлен там, где истоковый вывод каждого полевого МОП-транзистора соединен с другим светодиодом, как показано на принципиальной схеме. Для более эффективного рассеивания тепла при работе драйвера желательно использовать радиаторы.

Код программы написан на C-подобном языке Arduino и скомпилирован с использованием Arduino IDE. Код очень прост, основная цель этого кода – подача переменного напряжения на затворы. Вы можете напрямую загрузить код и изменить его в соответствии с вашими требованиями.
Источник
Arduino своими руками с USB портом
Хочу представить вам свой проект-вариант широко известного контроллера Arduino.
Начну с короткой предыстории. Электроникой и радиотехникой я занимаюсь больше 10 лет. А вот интерес к микроконтроллерам появился не так давно. Изучал язык С, программировал микроконтроллеры от фирмы Atmel, успех был переменчивым. И как-то, изучая просторы интернета на тему программирования микроконтроллеров, попал на сайт www.arduino.ru. Их контроллеры мне понравились, захотелось такой себе. Поскольку паяльник «в руках держать умею», покупать контроллер отказался и начал искать в интернете информацию по самостоятельному его изготовлению, но ничего подходящего не нашел. Вариант платы, которую собирают на страницах http://robocraft.ru/blog/arduino/19.html сайта, мне не подходит, да и не сильно нравится. Хотелось с USB разъемом.
Скачал файлы схем оригинальных версий контроллера Arduino, даташит на микросхему FT232R, распечатал статью «Ардуино хоум мэйд» (ссылка выше) и думал как это все соединить, чтобы получилось то, что я хотел найти. И получилась вот такая схема:
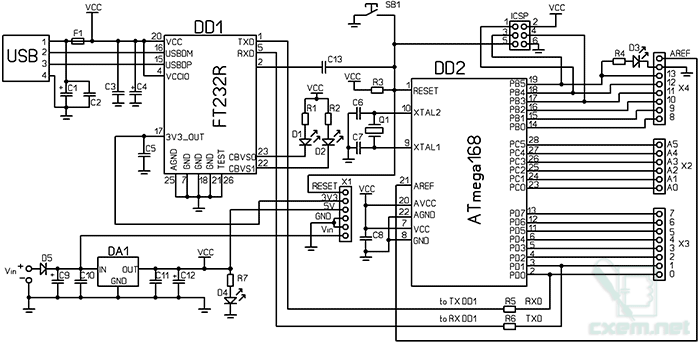
Используемые в схеме детали:
Резисторы я использовал SMD типоразмером 0805:
— R1, R2, R4, R7 – от 300 Ом до 1 кОм (какие найдете);
— R3 – 10 кОм;
— R5, R6 – 1 кОм.
Конденсаторы:
— С2, С3, С5, С13, С8, С10, С11 – SMD (0805) номиналом 0,1 мкф;
— электролиты С1, С4, С9, С12 – я использовал по 22 мкф*50 В, мне они подошли по высоте. Номинал не особо важен, не ниже 10 мкф на напряжение не ниже 10 В, кроме С9, его напряжение должно быть больше не 20 % напряжения питания внешнего источника;
— С6, С7 – керамика по 22 пф.
Светодиоды любые (форма, габариты, цвет) на ток 15-20 мА. Диод D5 – 1N4007 тоже в SMD корпусе.
Кварц – 16 МГц.
Микросхемы:
— DA1 – L7805 в корпусе ТО220;
— DD1 – FT232RL (хорошая микра, но в большем корпусе не выпускают);
— DD2 – сам наш микроконтроллер, я использовал ATmega168, можно ATmega8, думаю, что и ATmega328 тоже подойдет, главное загрузить соответствующий загрузчик (bootloader).
По итоговой стоимости точно сказать не могу (SMD компоненты не покупались, нашлись в коробочках электронщика-радиолюбителя). А затраты были следующие (г. Ростов-на-Дону): FT232RL – 200 р., ATmega168 – 220 р., L7805 – 15 р., разъемы, предохранитель, гребенки, панелька, кнопка – около 100 р.
При подключении собранного устройства к компьютеру определится новое устройство, нужно установить драйвер, указав путь к директории «FTDI USB Drivers» (в скаченной программе Arduino IDE).
С печатной платой (ПП) были некоторые проблемы, но мне помогла картинка ПП в статье. Все распиновки и расстояния разъемов совпадают с оригинальной платой ардуино, можно будет подсоединять различные arduino-совместимые платы расширения.
Назначение этого контроллера может быть самое различное – от «учебника» по программированию до создания серьезных охранных систем. Информации по его применению в интернете очень много.
Работает контроллер просто. На компьютер устанавливается программа Arduino IDE, скаченная бесплатно с официального сайта www.arduino.cc. В ней Вы пишите свою программу (скетч) для исполнения контроллером. Потом, нажимая кнопку в среде Arduino IDE «загрузить», компьютер компилирует Вашу программу в язык понятный микроконтроллеру и через виртуальный com порт, созданный микросхемой FT232R, передает ее микроконтроллеру. После загрузки программы, она начинает сразу исполняться, если не отключено питание контроллера. Также микросхема FT232R имеет выходной сигнал для автоматического перезапуска микроконтроллера, необходимого при загрузке скетча. Плата контроллера может питаться как от usb, так и от внешнего источника питания (8-25 В) для чего установлен микросхемный стабилизатор L7805. Присутствует на плате предохранитель 500 мА по +5 В от usb, чтобы не повредить usb порт при неполадках в плате контроллера. С помощью разъема ICSP можно программировать микроконтроллер внешним программатором. Кнопка, установленная на плате, сбрасывает работу микроконтроллера, и он начинает исполнение загруженной программы заново. Диод D5 защищает микроконтроллер от переполюсовки питания.
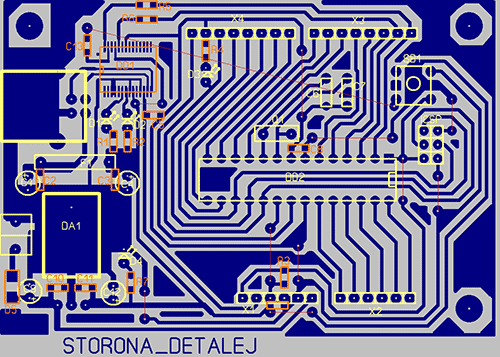
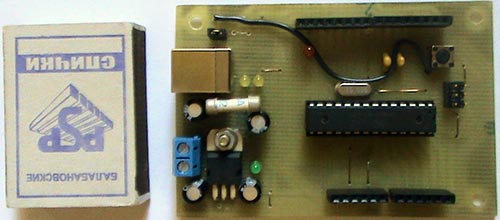
Фото готового контроллера:
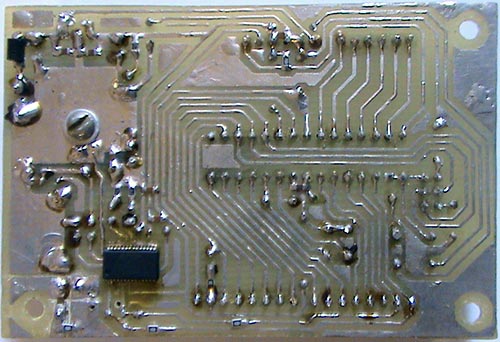
Расположение некоторых деталей на фото платы не совпадает с файлом ПП, по причине совершенствования на момент создания статьи. Файл ПП в программе Sprint-Layout 5.0 прилагается.
Правильно собранный и прошитый контроллер начинает работать сразу. Отмечу – что после первой (и возможно последующей) загрузки бутлоадера, начинает моргать с небольшой частотой светодиод D3.
Прошить бутлоадер готового устройства несложно. Самая сложность заключается в наличие программатора. Поскольку я имел опыт программировать микроконтроллеры, то у меня уже был собран программатор Prottoss AVR910. Лошадка рабочая, автору 5 из 5! Далее подключаем программатор к плате ардуино, открываем программу для программирования микроконтроллеров AVR (я использовал CodeVisionAVR), открываем окно прошивки микроконтроллера, нажимаем load flash, находим наш (для ATmega168) файл прошивки в скаченном дистрибутиве «…arduino-1.0.1\hardware\arduino\bootloaders\atmega\ ATmegaBOOT_168_diecimila.hex. Далее необходимо выставить lock и fuse биты так, как показано на рисунке:
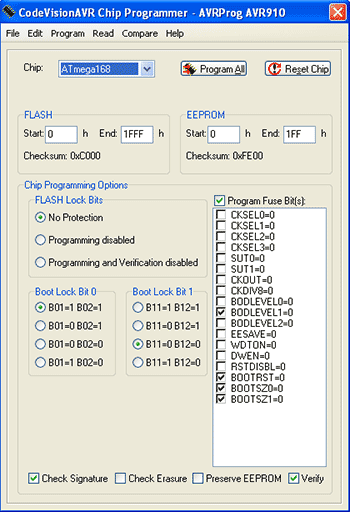
Узнать фьюз- и лок-биты для своего микроконтроллера можно посмотреть в файле: «…arduino-1.0.1\hardware\arduino\boards.txt», использовав калькулятор фьюзов для AVR (можно легко найти в интернете).
Если же у Вас нет программатора, но есть программатор у друга, соседа. то есть другой, более быстрый и полезный способ прошить загрузчик. Для этого нужно собрать программатор по этой схеме. Схема рабочая и проверенная мной. Простота этого метода заключается в том, что не нужно искать прошивку микроконтроллера, выставлять фьюз и лок-биты. При подключении этого программатора к компьютеру с установленными драйверами и подключенным программируемым МК, Вы, выбрав в программе Arduino IDE порт, на котором «сидит» программатор и свою прошиваемую плату и подключенный программатор, просто нажимаете на кнопку во вкладке сервис «прошить загрузчик» и радуетесь.
Если же у Вас присутствует проблема «яйца и курицы», то я посоветую собрать вот этот программатор (сам его не собирал, но думаю вешь хорошая). Или погуглить интернет на тему AVRISP-mkII. Еще вложу архив с информацией по этому программатору с файлами и описанием.
Про альтернативный метод прошивки бутлоадера можно почитать здесь.
Теперь (с устанвленными драйверами на компьютере, открываете программу Arduino IDE, во вкладке «Сервис» наводим курсор на вкладку «плата» и выбираем свое устройство (в моем варианте это – Arduino Diecimila or Duemilanove w/ ATmega168). Далее, там же, выбираем порт к которому подключен контроллер (можно посмотреть в диспетчере устройств компьютера). Реализуем свои мысли в скетче и радуемся работе контроллера!
Все возникшие вопросы присылайте в личку.
Плату контроллера разработал и успешно использует ростовский радиолюбитель Ананьев Валерий. Логин на сайте: kaznachej
Источник
Драйверы двигателя L298N, L293D и Arduino Motor Shield
Драйвер двигателя выполняет крайне важную роль в проектах ардуино, использующих двигатели постоянного тока или шаговые двигатели. C помощью микросхемы драйвера или готового шилда motor shield можно создавать мобильных роботов, автономные автомобили на ардуино и другие устройства с механическими модулями. В этой статье мы рассмотрим подключение к ардуино популярных драйверов двигателей на базе микросхем L298N и L293D.
Драйвер двигателя в проектах ардуино
Для чего нужен драйвер двигателя?
Как известно, плата ардуино имеет существенные ограничения по силе тока присоединенной к ней нагрузки. Для платы это 800 mA, а для каждого отдельного вывода – и того меньше, 40mA. Мы не можем подключить напрямую к Arduino Uno, Mega или Nano даже самый маленький двигатель постоянного тока. Любой из этих двигателей в момент запуска или остановки создаст пиковые броски тока, превышающие этот предел.
Как же тогда подключить двигатель к ардуино? Есть несколько вариантов действий:
Использовать реле. Мы включаем двигатель в отдельную электрическую сеть, никак не связанную с платой Arduino. Реле по команде ардуино замыкает или размыкает контакты, тем самым включает или выключает ток. Соответственно, двигатель включается или выключается. Главным преимуществом этой схемы является ее простота и возможность использовать Главным недостатком данной схемы является то, что мы не можем управлять скоростью и направлением вращения.
Использовать силовой транзистор. В данном случае мы можем управлять током, проходящим через двигатель, а значит, можем управлять скоростью вращения шпинделя. Но для смены направления вращения этот способ не подойдет.
Использовать специальную схему подключения, называемую H-мостом, с помощью которой мы можем изменять направление движения шпинделя двигателя. Сегодня можно без проблем найти как микросхемы, содержащие два или больше H-моста, так и отдельные модули и платы расширения, построенные на этих микросхемах.
В этой статье мы рассмотрим последний, третий вариант, как наиболее гибкий и удобный для создания первых роботов на ардуино.
Микросхема или плата расширения Motor Shield
Motor Shield – плата расширения для Ардуино, которая обеспечивает работу двигателей постоянного тока и шаговых двигателей. Самыми популярными платами Motor Shield являются схемы на базе чипов L298N и L293D, которые могут управлять несколькими двигателями. На плате установлен комплект сквозных колодок Ардуино Rev3, позволяющие устанавливать другие платы расширения. Также на плате имеется возможность выбора источника напряжения – Motor Shield может питаться как от Ардуино, так и от внешнего источника. На плате имеется светодиод, который показывает, работает ли устройство. Все это делает использование драйвера очень простым и надежным – не нужно самим изобретать велосипеды и решать уже кем-то решенные проблемы. В этой статье мы будем говорить именно о шилдах.
Принцип действия H-моста
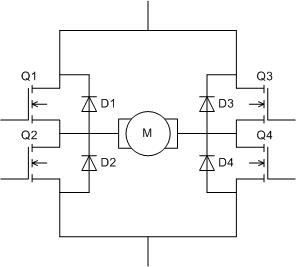 Принцип работы драйвера двигателя основан на принципе работы H-моста. H-мост является электронной схемой, которая состоит из четырех ключей с нагрузкой. Название моста появилось из напоминающей букву H конфигурации схемы.
Принцип работы драйвера двигателя основан на принципе работы H-моста. H-мост является электронной схемой, которая состоит из четырех ключей с нагрузкой. Название моста появилось из напоминающей букву H конфигурации схемы.
Схема моста изображена на рисунке. Q1…Q4 0 полевые, биполярные или IGBT транзисторы. Последние используются в высоковольтных сетях. Биполярные транзисторы практически не используются, они могут присутствовать в маломощных схемах. Для больших токов берут полевые транзисторы с изолированным затвором. Ключи не должны быть замкнуты вместе одновременно, чтобы не произошло короткого замыкания источника. Диоды D1…D4 ограничительные, обычно используются диоды Шоттки.
С помощью изменения состояния ключей на H-мосте можно регулировать направление движения и тормозить моторы. В таблице приведены основные состояния и соответствующие им комбинации на пинах.
| Q1 | Q2 | Q3 | Q4 | Состояние |
| 1 | 0 | 0 | 1 | Поворот мотора вправо |
| 0 | 1 | 1 | 0 | Поворот мотора влево |
| 0 | 0 | 0 | 0 | Свободное вращение |
| 0 | 1 | 0 | 1 | Торможение |
| 1 | 0 | 1 | 0 | Торможение |
| 1 | 1 | 0 | 0 | Короткое замыкание |
| 0 | 0 | 1 | 1 | Короткое замыкание |
Драйвер двигателя L298N
Модуль используется для управления шаговыми двигателями с напряжением от 5 до 35 В. При помощи одной платы L298N можно управлять сразу двумя двигателями. Наибольшая нагрузка, которую обеспечивает микросхема, достигает 2 А на каждый двигатель. Если подключить двигатели параллельно, это значение можно увеличить до 4 А.
Плата выглядит следующим образом:

Распиновка микросхемы L298N:
- Vcc – используется для подключения внешнего питания;
- 5В;
- Земля GND;
- IN1, IN2, IN3, IN4 – используется для плавного управления скоростью вращения мотора;
- OUT1, OUT2 – используется для выхода с первого двигателя;
- OUT3, OUT4 – используется для выхода со второго двигателя;
- S1 – переключает питание схемы: от внешнего источника или от внутреннего преобразователя;
- ENABLE A, B – требуются для раздельного управления каналами. Используются в двух режимах – активный, при котором каналами управляет микроконтроллер и имеется возможность изменения скорости вращения, и пассивный, в котором невозможно управлять скоростью двигателей (установлено максимальное значение).

При подключении двух двигателей, нужно проверить, чтобы у них была одинаковая полярность. Если полярность разная, то при задании направления движения они будут вращаться в противоположные стороны.
Драйвер двигателя L293D
L293D – является самой простой микросхемой для работы с двигателями. L293D обладает двумя H-моста, которые позволяют управлять двумя двигателями. Рабочее напряжение микросхемы – 36 В, рабочий ток достигает 600 мА. На двигатель L293D может подавать максимальный ток в 1,2 А.
В схеме имеется 16 выходов. Распиновка:
- +V – питание на 5 В;
- +Vmotor – напряжение питания для мотором до 36 В;
- 0V – земля;
- En1, En2 –включают и выключают H-мосты;
- In1, In2 – управляют первым H-мостом;
- Out1, Out2 – подключение первого H-моста;
- In3, In4 – управляют вторым H-мостом;
- Out3, Out4 – подключение второго H-моста.

Для подключения к микроконтроллеру Arduino Uno нужно соединить выходы In1 на L293D и 7 пин на Ардуино, In2 – 8, In3 – 2, In4 – 3, En1 – 6, En2 – 5, V – 5V, Vmotor – 5 V, 0V – GND. Пример подключения одного двигателя к Ардуино показан на рисунке.

Драйвер двигателя на микросхеме HG7881
HG7881 – двухканальный драйвер, к которому можно подключить 2 двигателя или четырехпроводной двухфазный шаговый двигатель. Устройство часто используется из-за своей невысокой стоимости. Драйвер используется только для изменения направления вращения, менять скорость он не может.

Плата содержит 2 схемы L9110S, работающие как H-мост.
Характеристики драйвера HG7881:
- 4-контактное подключение;
- Питание для двигателей от 2,5 В до 12 В;
- Потребляемый ток менее 800 мА;
- Малые габариты, небольшой вес.
Распиновка:
- GND – земля;
- Vcc – напряжение питания 2,5В – 12В;
- A-IA – вход A(IA) для двигателя A;
- A-IB – вход B (IB) для двигателя A;
- B-IA – вход A(IA) для двигателя B;
- B-IB – вход B (IB) для двигателя B.
В зависимости от поданного сигнала на выходах IA и IB будет разное состояние для двигателей. Возможные варианты для одного из моторов приведены в таблице.
| IA | IB | Состояние мотора |
| 0 | 0 | Остановка |
| 1 | 0 | Двигается вперед |
| 0 | 1 | Двигается назад |
| 1 | 1 | Отключение |
Подключение одного двигателя к Ардуино изображено на рисунке.

Сравнение модулей
Модуль L293D подает максимальный ток в 1,2А, в то время как на L298N можно добиться максимального тока в 4 А. Также L293D обладает меньшим КПД и быстро греется во время работы. При этом L293D является самой распространенной платой и стоит недорого. Плата HG7881 отличается от L293D и L298N тем, что с ее помощью можно управлять только направлением вращения, скорость менять она не может. HG7881 – самый дешевый и самый малогабаритный модуль.
Подключение L298N к Arduino
Как уже упоминалось, в первую очередь нужно проверить полярность подключенных двигателей. Двигатели, вращающиеся в различных направлениях, неудобно программировать.
Нужно присоединить источник питания. + подключается к пину 4 на плате L298N, минус (GND) – к 5 пину. Затем нужно соединить выходы с L298N и пины на Ардуино, причем некоторые из них должны поддерживать ШИМ-модуляцию. На плате Ардуино они обозначены
. Выходы с L298N IN1, IN2, IN3 и IN4 подключить к D7, D6, D5 и D4 на Ардуино соответственно. Подключение всех остальных контактов представлено на схеме.

Направление вращения задается с помощью сигналов HIGH и LOW на каждый канал. Двигатели начнут вращаться, только когда на 7 пине для первого мотора и на 12 пине для второго на L298N будет сигнал HIGH. Подача LOW останавливает вращение. Чтобы управлять скоростью, используются ШИМ-сигналы.
Для управления шаговым двигателем в Arduino IDE существует стандартная библиотека Stepper library. Чтобы проверить работоспособность собранной схемы, можно загрузить тестовый пример stepper_oneRevolution. При правильной сборке вал двигателя начнет вращаться.
При работе с моторами Ардуино может периодически перезагружаться. Это возникает из-за того, что двигателям требуются большие токи при старте и в момент торможения. Для решения этой проблемы в плату встроены конденсаторы, диоды и другие схемы. Также для этих целей на шидле имеется раздельное питание.
Источник