- Робот на Arduino Uno, управляемый по WiFi
- Шаги для настройки приложения Blynk
- Необходимые компоненты
- Работа схемы
- Исходный код программы
- Как сделать робота на Ардуино своими руками: самодельный robot Arduino в домашних условиях
- Шаг 1: Необходимые материалы
- Шаг 2: Делаем каркас робота
- Шаг 3: Монтируем электронику
- Шаг 4: Устанавливаем «глаза» робота
- Шаг 5: Схема подключений
- Шаг 6: Код
- Шаг 7: Завершенный робот
- Робот на Ардуино и машинка на Bluetooth своими руками
- Робот на ардуино своими руками
- Контроллер Ардуино
- Конструкция, шасси и двигатели робота на Ардуино
- Драйвер двигателей
- Красивый корпус
- Питание робота
- Где купить платформу и запчасти
Робот на Arduino Uno, управляемый по WiFi
Роботы являются одними из самых популярных устройств, конструируемыми энтузиастами в микроконтроллерной технике. Мы на нашем сайте уже рассматривали проекты различных роботов на основе платы Arduino Uno:

А в этой статье мы рассмотрим создание робота на основе Arduino Uno, управляемого по WiFi со смартфона с помощью приложения Blynk App. Для демонстрации работы этого робота мы используем мобильное приложение для Android под названием “Blynk”. Blynk – это совместимое приложение с Arduino, удобное для создания различных проектов для интернета вещей (IoT based project). Это приложение можно скачать из Google Play Store, его легко установить и настроить.
Шаги для настройки приложения Blynk
1. Сначала скачайте его из Google Play Store и установите его на свой мобильный телефон с Android.
2. После этого необходимо создать аккаунт если у вас его нет. Также вы можете использовать Gmail аккаунт (если он у вас есть).
3. Теперь выберите Arduino Board и задайте имя для своего проекта.

4. Запишите код авторизации токена (Auth Token Code) или просто перешлите его на свой Email аккаунт и затем скопируйте и вставьте его в свою программу (скетч) для Arduino.

5. Запишите свой Auth Token Code в программе (скетче) для Arduino.
// You should get Auth Token in the Blynk App.
// Go to the Project Settings (nut icon).
char auth[] = «caa17a11c0124d4083d0eaa995f45917»;
6. Затем кликните на «создать кнопку» (create button) в приложении Blynk.
7. Теперь выберите Joystick Widget, Click on Joystick, Configure the Joystick (более подробно смотрите в видео в конце статьи) и нажмите кнопку возвращения назад back button.
 |  |  |
8. После этого нажмите кнопку Play в верхнем правом углу экрана.
Более подробно процессы настройки приложения Blynk показаны в видео в конце статьи.
Необходимые компоненты
- Плата Arduino Uno (купить на AliExpress).
- Wi-Fi модуль ESP8266 (купить на AliExpress).
- Драйвер двигателей L293D (купить на AliExpress).
- Электродвигатели постоянного тока.
- USB кабель.
- Источник питания.
- Соединительные провода.
- Батарейки.
- Потенциометр 10 кОм (опционально).
- Шасси робота с колесами.
- Мобильный телефон с Android.
- Приложение Blynk.
Работа схемы
Схема устройства представлена на следующем рисунке.
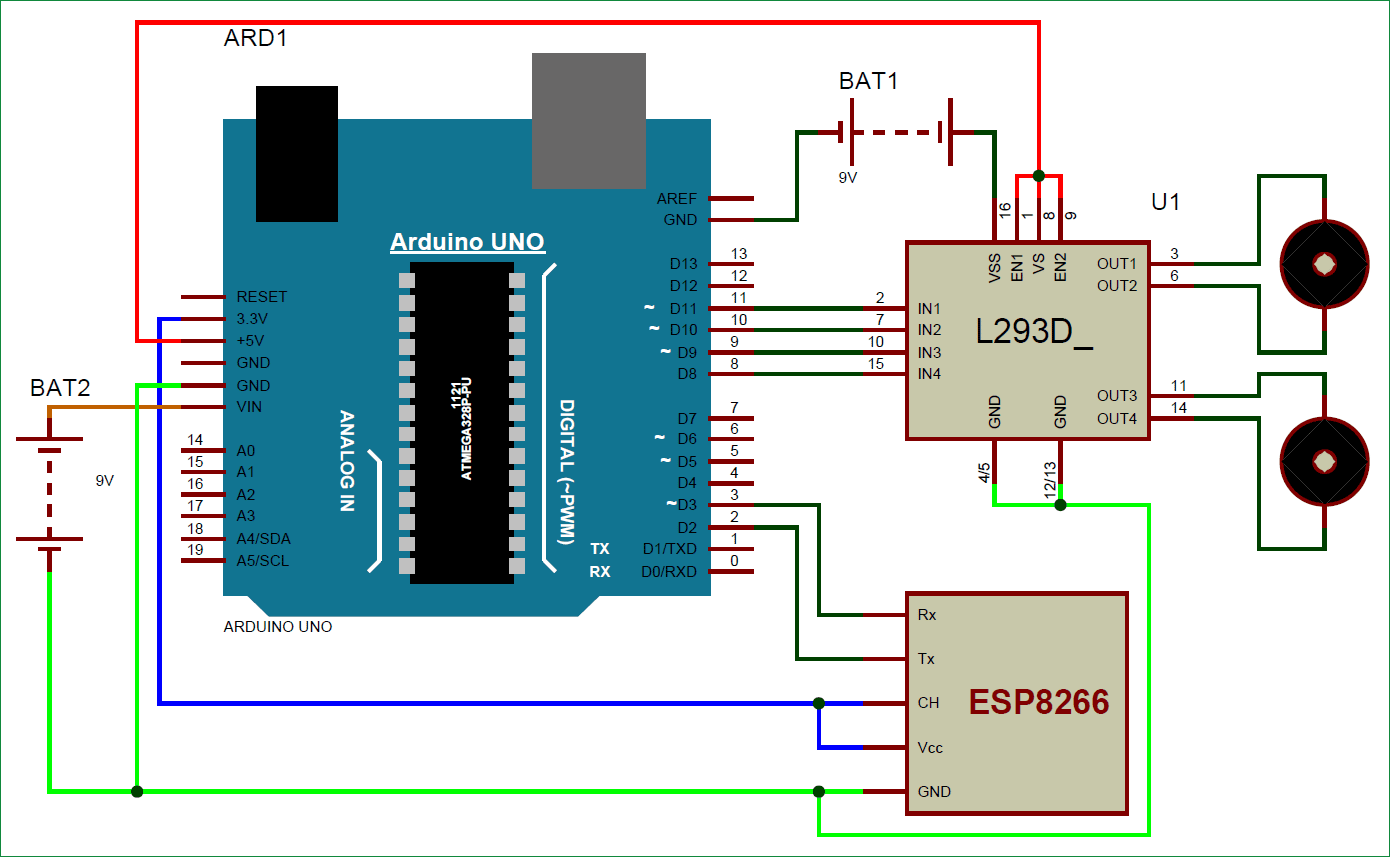 Основными элементами в ней являются плата Arduino Uno и Wi-Fi модуль ESP8266. Контакты Vcc и GND модуля ESP8266 непосредственно подключены к контактам 3.3V и GND платы Arduino, контакт CH_PD также подсоединен к контакту 3.3V. Контакты Tx и Rx модуля ESP8266 подключены к контактам 2 и 3 платы Arduino. Software Serial Library (библиотека последовательной связи) используется для осуществления последовательной связи на контактах 2 и 3 платы Arduino. В статье про передачу Email с использованием Arduino мы достаточно подробно останавливались на подключении WiFi модуля ESP8266 к плате Arduino, поэтому здесь эти вопросы рассматривать не будем.
Основными элементами в ней являются плата Arduino Uno и Wi-Fi модуль ESP8266. Контакты Vcc и GND модуля ESP8266 непосредственно подключены к контактам 3.3V и GND платы Arduino, контакт CH_PD также подсоединен к контакту 3.3V. Контакты Tx и Rx модуля ESP8266 подключены к контактам 2 и 3 платы Arduino. Software Serial Library (библиотека последовательной связи) используется для осуществления последовательной связи на контактах 2 и 3 платы Arduino. В статье про передачу Email с использованием Arduino мы достаточно подробно останавливались на подключении WiFi модуля ESP8266 к плате Arduino, поэтому здесь эти вопросы рассматривать не будем.
Микросхема драйвера двигателей L293D используется для управления двигателями постоянного тока. Входные контакты микросхемы драйвера мотора непосредственно подключены к контактам 8, 9, 10 и 11 платы Arduino. Электродвигатели постоянного тока подключены к выходным контактам микросхемы L293D. Для питания схемы и двигателей постоянного тока мы использовали батарейку на 9 Вольт.
Структурная схема работы устройства показана на следующем рисунке.

Работа схемы достаточно проста – нам в приложении Blynk на смартфоне необходимо просто перемещать джойстик в том направлении, в котором мы хотим чтобы двигался робот. Если мы отпустим кнопку джойстика в приложении, то его рычаг переместится в центр и робот остановится.
Приложение Blynk передает значения двух осей джойстика плате Arduino при помощи Wi-Fi соединения. Плата Arduino принимает эти значения, сравнивает их с заранее определенными значениями и по результатам сравнения выдает команды на движения робота.
Исходный код программы
Код программы практически полностью готов в среде Arduino IDE. Нам необходимо просто скачать Blynk Library для Arduino. И после внесения ряда изменений мы получим программу для управления роботом по Wi-Fi.
В программе мы первым делом должны подключить все необходимые библиотеки, затем мы должны войти в строку авторизации (auth string) в токене авторизации (Auth Token) от приложения Blynk. Далее мы подсоединяем последовательный контакт модуля Wi-Fi к Arduino с помощью библиотеки последовательной связи. RX подсоединяем к контакту 2, а TX – к контакту 3.
#define BLYNK_PRINT Serial // поместите это в комментарий чтобы отключить печать и сэкономить пространство
#include
#include
// Set ESP8266 Serial object
#include
SoftwareSerial EspSerial(2, 3); // RX, TX
ESP8266 wifi(EspSerial);
// You should get Auth Token in the Blynk App (вы должны получить Auth Token в приложении Blynk)
// Go to the Project Settings (nut icon). (зайдите в настройки проекта)
char auth[] = «caa17a11c0124d4083d0eaa995f45917»;
Затем мы должны сконфигурировать контакты 8,9,10,11 в режим работы на вывод данных чтобы через них передавать инструкции роботу куда ему двигаться, а также запрограммировать функции для движения робота в заданных направлениях: void forward(), void backward(),void right() and void left() .
После этого в функции setup мы должны инициализировать все необходимые устройства, задать направление работы контактов, инициализировать последовательную связь, ввести имя пользователя и пароль для Wi-Fi соединения.
void setup()
<
// установить бодовую скорость передачи
Serial.begin(9600);
delay(10);
// установка бодовой скорости для ESP8266
// 9600 рекомендовано для библиотеки Software Serial
EspSerial.begin(9600);
delay(10);
Blynk.begin(auth, wifi, «username», «password»); // имя пользователя и пароль для wifi
pinMode(m11, OUTPUT);
pinMode(m12, OUTPUT);
pinMode(m21, OUTPUT);
pinMode(m22, OUTPUT);
>
После этого мы в программе должны проверить ряд условий для управления роботом. Здесь мы выбрали виртуальный контакт 1 (V1) чтобы получать информацию о требуемом направлении движения от приложения Blynk. Поскольку мы выбрали соответствующую опцию в приложении, то мы можем получать значения осей x и y на этом же самом контакте.
BLYNK_WRITE(V1)
<
int x = param[0].asInt();
int y = param[1].asInt();
if(y>220)
forward();
else if(y
backward();
else if(x>220)
right();
else if(x
left();
else
Stop();
>
Далее мы просто должны использовать функцию blynk в цикле loop.
Источник
Как сделать робота на Ардуино своими руками: самодельный robot Arduino в домашних условиях
В сегодняшней статье я расскажу вам, как сделать робота, обходящего препятствия, на базе микроконтроллера Ардуино своими руками.
Чтобы сделать робота в домашних условиях вам понадобится собственно сама плата микроконтроллера и ультразвуковой сенсор. Если сенсор зафиксирует препятствие, сервопривод позволит ему обогнуть препятствие. Сканируя пространство справа и слева, робот выберет наиболее предпочтительный путь для обхода препятствия.
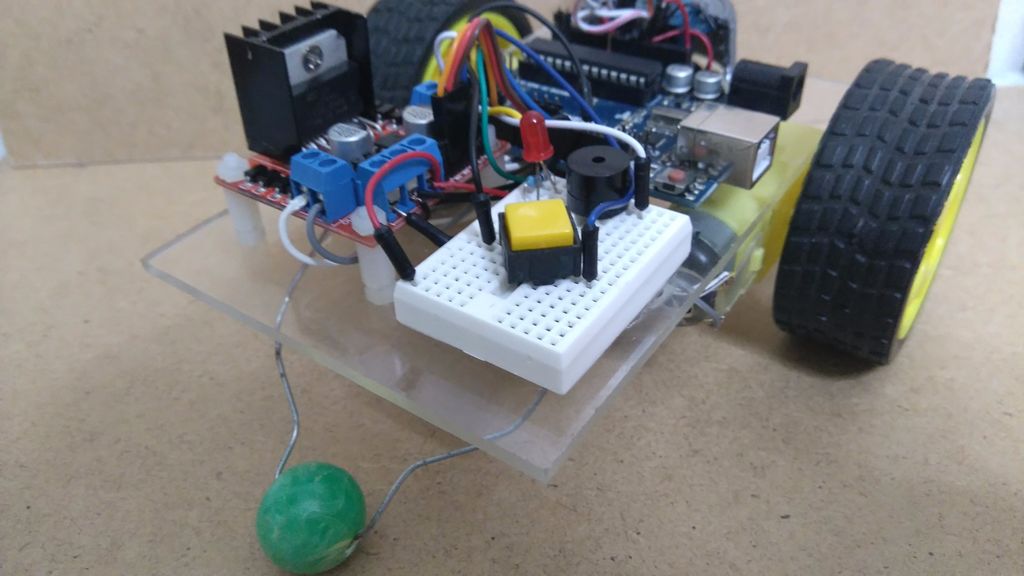
У робота есть индикаторный диод, зуммер, сигнализирующий об обнаружении препятствия, и функциональная кнопка.
Самодельный робот очень простой в исполнении.
Шаг 1: Необходимые материалы
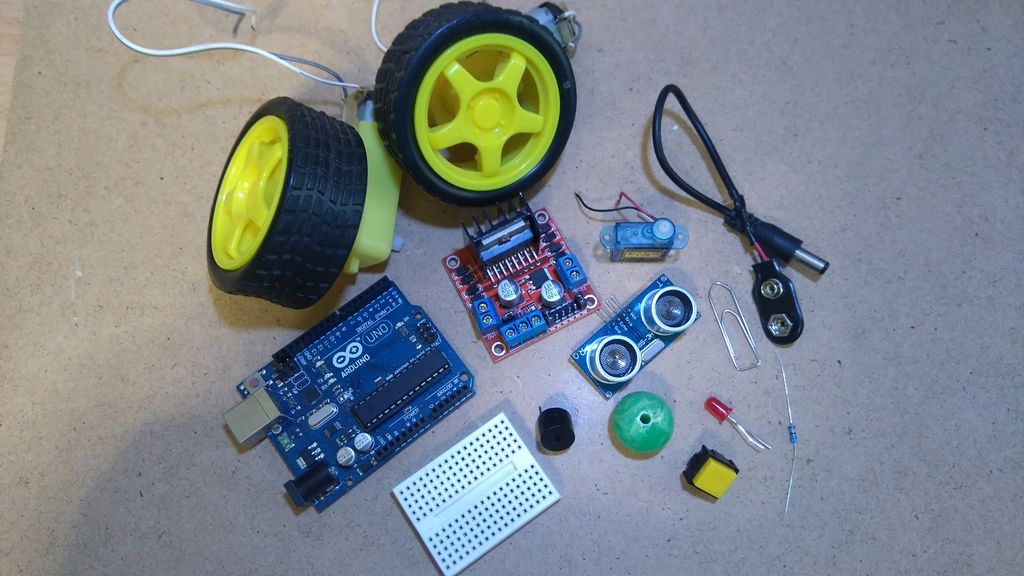
- Arduino UNO
- Мини макетная плата
- Драйвер двигателя L298N
- Два электромотора с колесами
- Ультразвуковой датчик измерения расстояния HC — SR04
- Микросервопривод
- Кнопка
- Красный диод
- Резистор 220 Ом
- Отсек для элемента питания 9В (с/без коннектора)
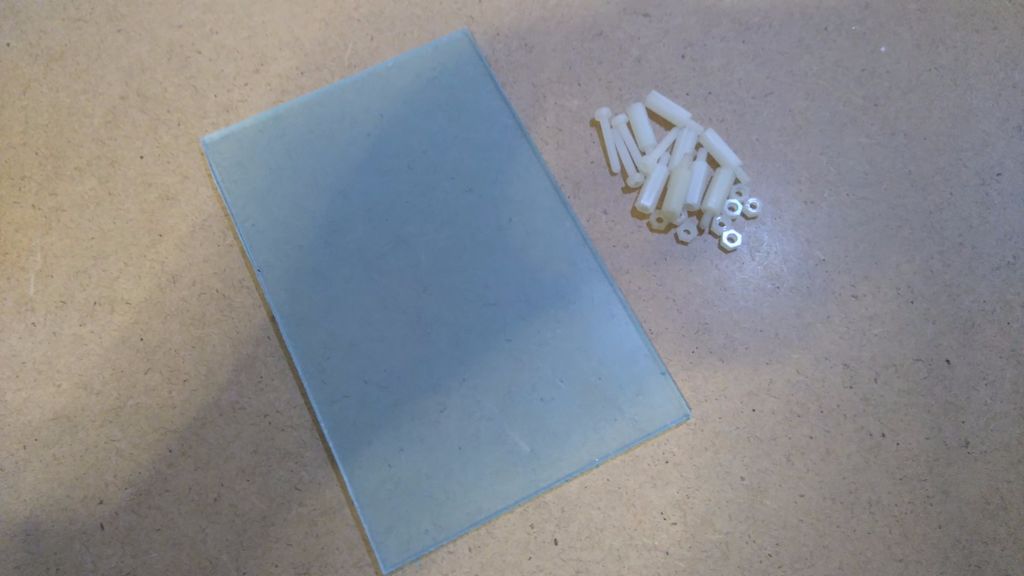
- 8 стоек для макетных плат с наружной и внутренней резьбой, 8 винтов и 8 гаек
Также вам понадобится одна большая металлическая скрепка и бусина (для заднего опорного колеса).
Для изготовления каркаса робота использован кусок плексигласа (оргстекла) 12х9,5 см. Можно сделать каркас из дерева или металла, или даже из компакт-дисков.
- Дрель
- Суперклей
- Отвертка
- Клеевой пистолет (опционально)
Для питания робота используется батарейка 9В (крона), она достаточно компактная и дешевая, но разрядится уже примерно через час. Возможно, вы захотите сделать питание от аккумулятора на 6 В (минимум) или 7 В (максимум). Аккумулятор мощнее батарейки, но и дороже и больше по габаритам.
Шаг 2: Делаем каркас робота
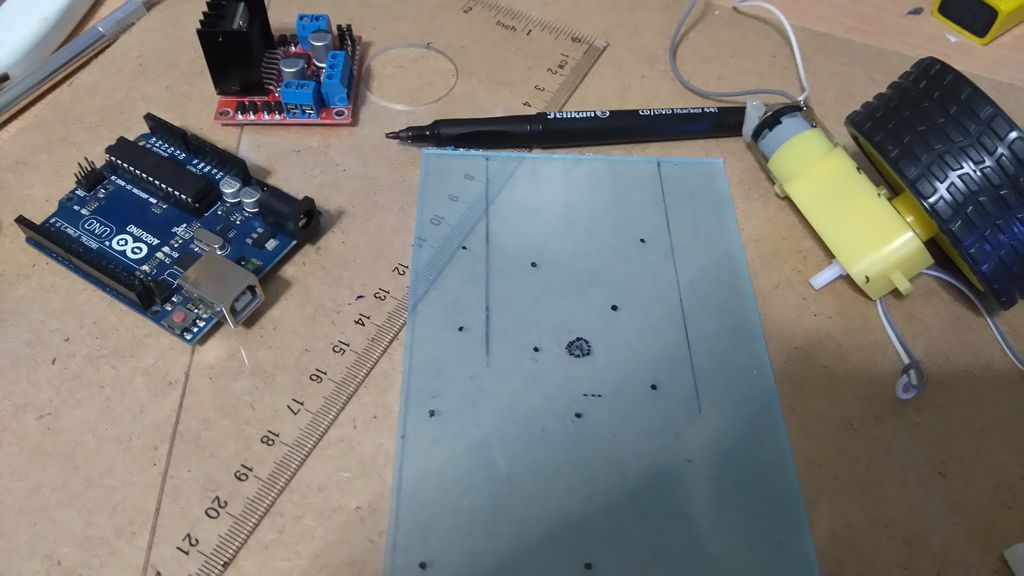
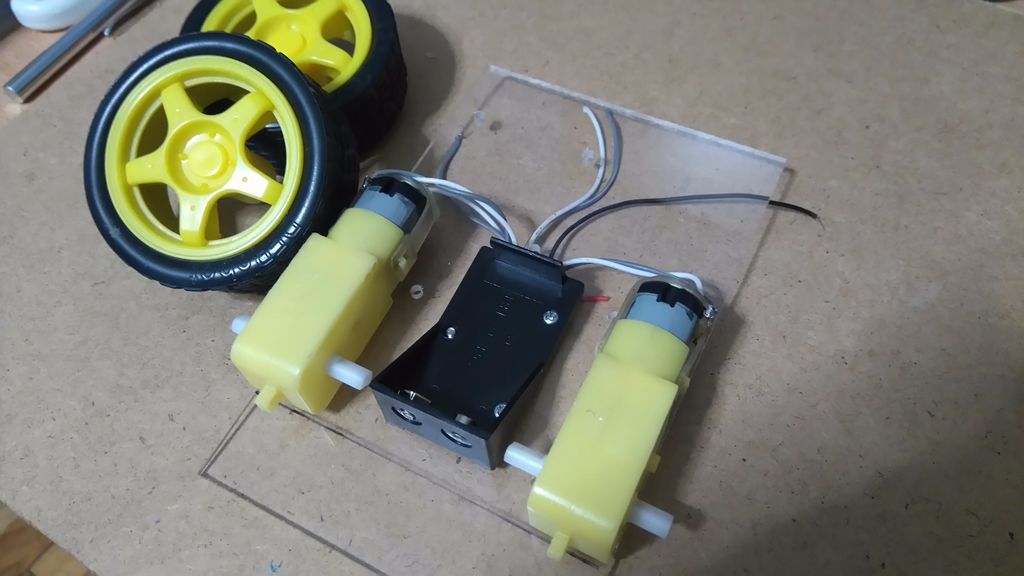
Положите всю электронику на плексиглас и маркером отметьте места, где нужно будет просверлить монтажные отверстия (фото 1).
На нижней стороне пластины плексигласа приклейте на суперклей электромоторы. Они должны быть параллельны друг другу, с помощью линейки-угольника проверьте их положение прежде чем клеить (фото 2). Затем приклейте на суперклей отсек для батарейки.
Можно также просверлить отверстия под провода электромоторов и питания.
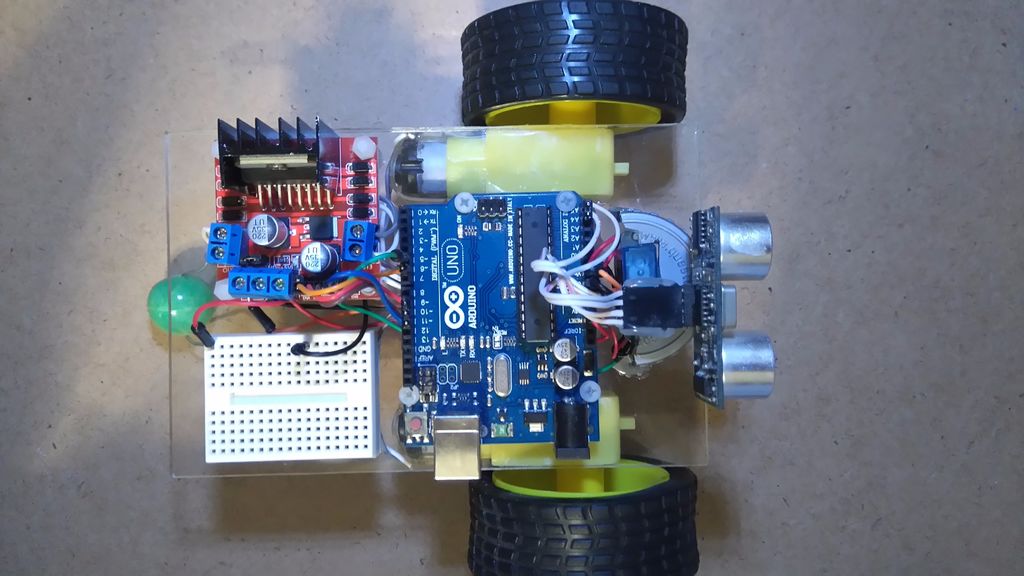
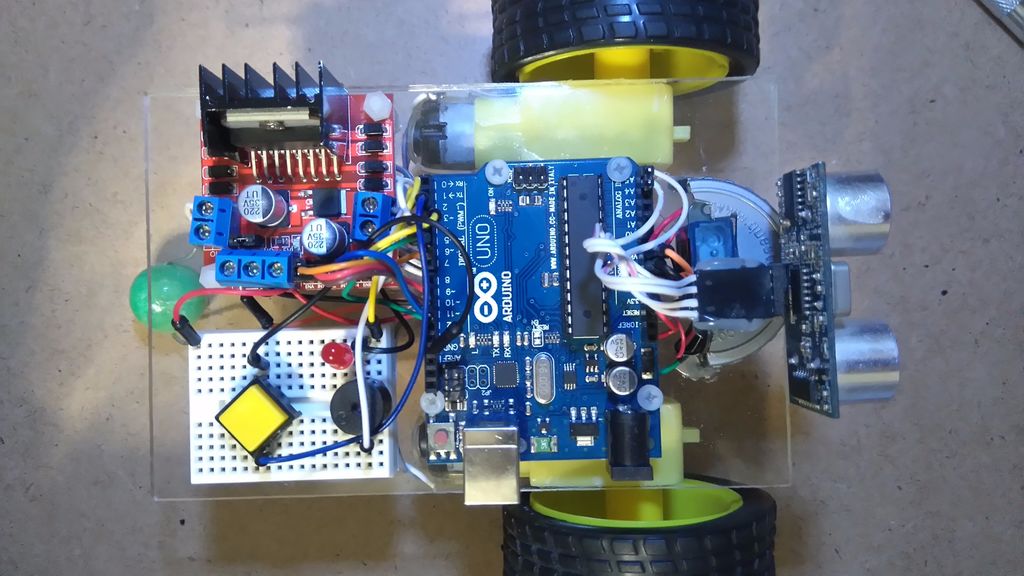
Шаг 3: Монтируем электронику
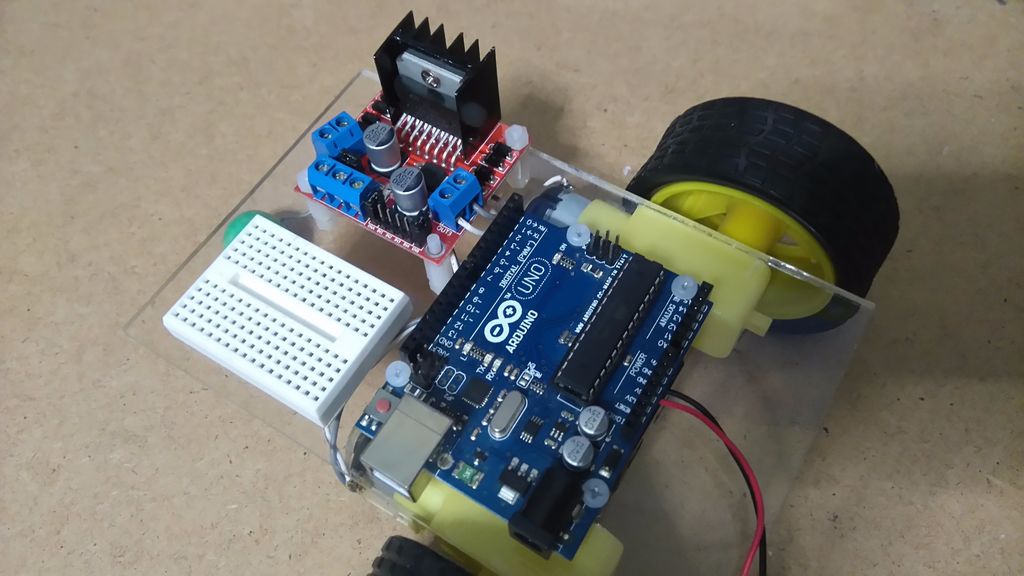

Закрепите на каркасе плату контроллера и драйвер двигателей, используя стойки для печатных плат, винты и гайки. Миниатюрная макетная плата клеится на липкий слой (уже есть на нижней стороне) (фото 1).
Теперь делаем заднее опорное колесо из скрепки и бусины (фото 2). Концы проволоки закрепите на нижней стороне каркаса суперклеем или термоклеем.
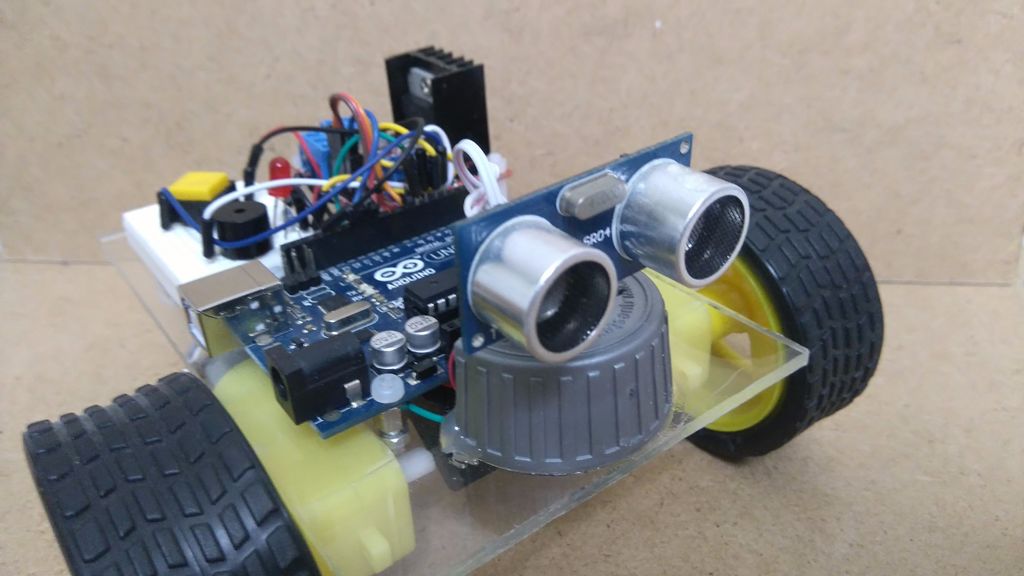
Шаг 4: Устанавливаем «глаза» робота
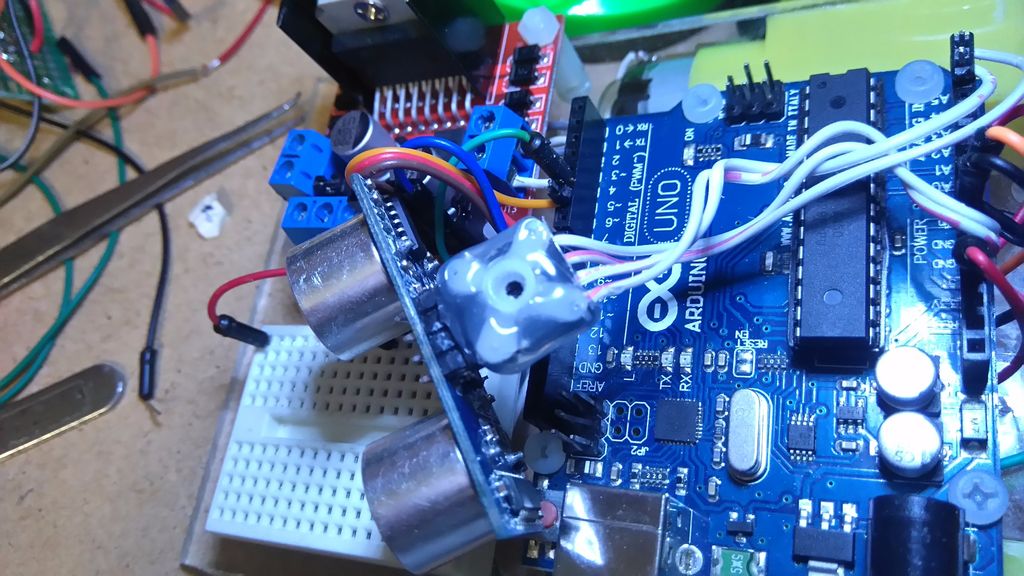
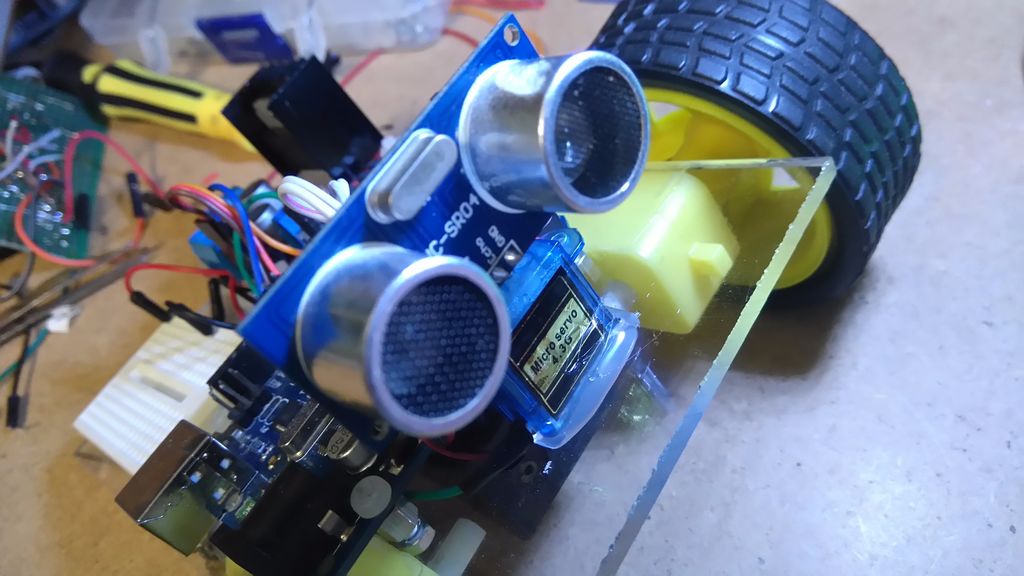
На передней части каркаса приклейте на суперклей миниатюрный сервопривод. Рассмотрите на первом фото, как крепится плата ультразвукового датчика к сервоприводу с помощью маленького вала.
На втором фото показано, как выглядит завершенное соединение датчика и сервопривода.
Шаг 5: Схема подключений
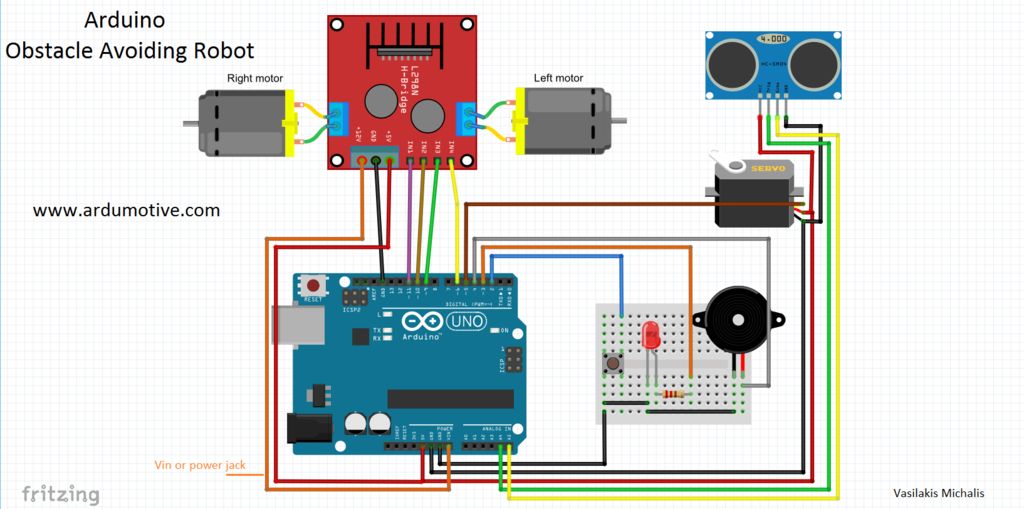
Теперь приступаем к подключению электронных компонентов. Подключение компонентов происходит согласно схеме на рисунке 1.
На макетную плату устанавливайте только диод, зуммер и кнопку, это упрощает схему и позволяет добавить дополнительные устройства в дальнейшем.
Шаг 6: Код

Код, который приведен ниже, сделан с помощью Codebender.
Codebender – это браузерный IDE, это самый простой способ программировать вашего робота из браузера. Нужно кликнуть на кнопку «Run on Arduino» и все, проще некуда.
Вставьте батарейку в отсек и нажмите на функциональную кнопку один раз, и робот начнет движение вперед. Для остановки движения нажмите на кнопку еще раз.
Нажав кнопку «Edit», вы можете редактировать скетч для своих нужд.
Например, изменив значение «10» измеряемого расстояния до препятствия в см, вы уменьшите или увеличите дистанцию, которую будет сканировать robot Arduino в поисках препятствия.
Если робот не двигается, может изменить контакты электромоторов (motorA1 и motorA2 или motorB1 и motorB2).
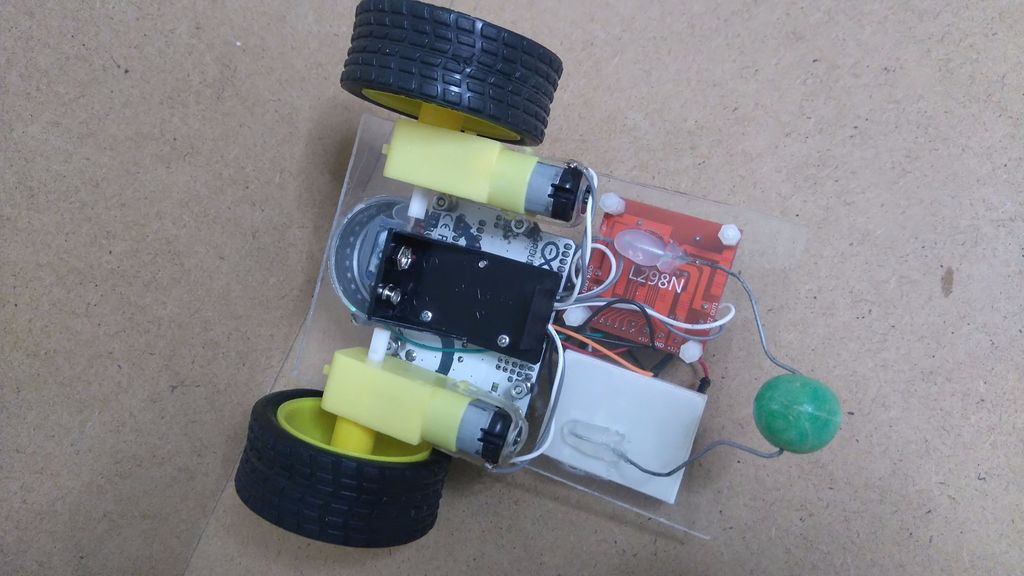
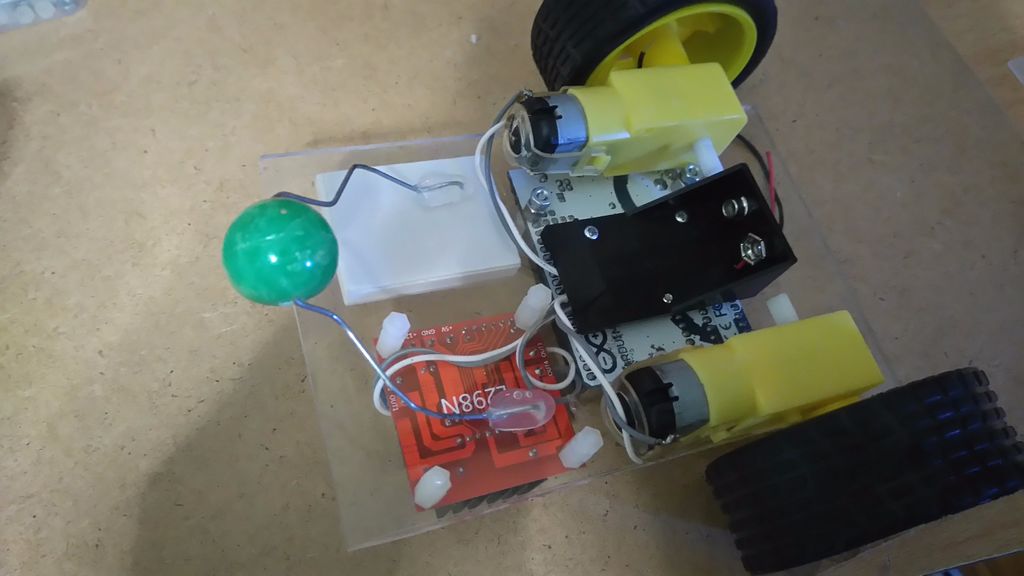
Шаг 7: Завершенный робот
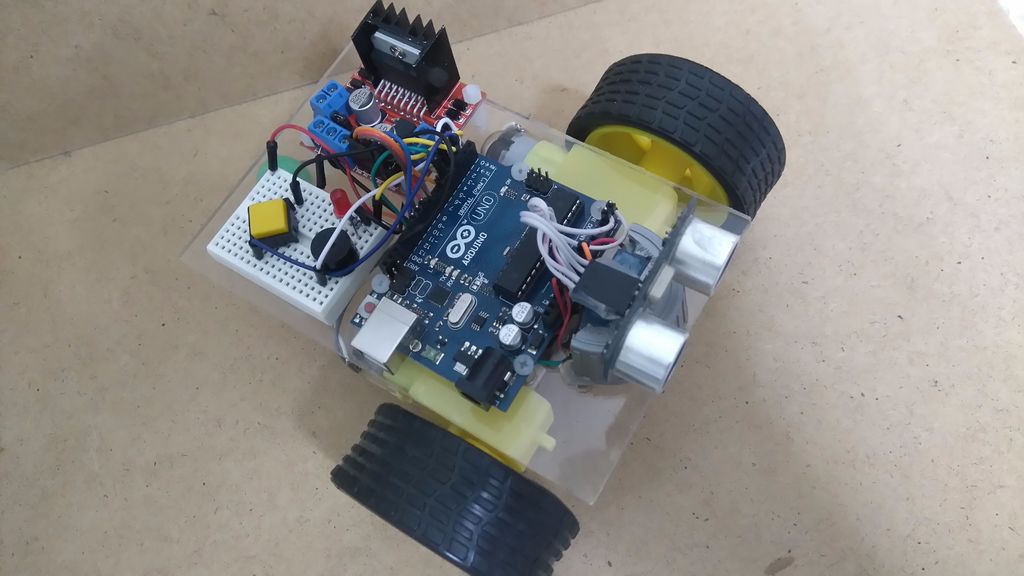
Ваш самодельный робот, обходящий препятствия, на базе микроконтроллера Arduino готов.

Рассказываю как сделать какую-либо вещь с пошаговыми фото и видео инструкциями.
Источник
Робот на Ардуино и машинка на Bluetooth своими руками
Робот – машинка на Ардуино становятся одним из самым популярных инженерных проектов в школьной робототехнике. Именно с таких устройств, автономных или управляемых со смартфона и bluetooth, начинается путь в робототехнику “после Lego”. К счастью, сегодня можно без труда купить все необходимые компоненты и достаточно быстро создать своего первого робота для езды по линии или объезда препятствий. В этой статье вы найдете подробную видео инструкцию как сделать продвинутый автомобиль Arduino Car своими руками, с питанием, датчиками линии, расстояния и управлении через bluetooth.
Робот на ардуино своими руками
В отличие от других проектов, создание робота – автомобиля (Arduino Car) требует понимания и навыков работы сразу с несколькими важными компонентами, поэтому не стоит приступать к созданию машинок без получения базовых навыков работы с платформой Arduino. В любом случае, вам нужно будет но только подключить готовые модули, но и собрать конструкцию, шасси с двигателями, обеспечить правильное питание и управление. Все это потребует определенного терпения.
 Робот машина на Ардуино
Робот машина на Ардуино
Вот список ключевых компонентов, которые обязательно встретятся в проекте.
Контроллер Ардуино
Куда уж без него, если мы говорим о проектах на этой платформе. Как правило, роботы машины делают на базе плат Arduino Uno и Nano. Mega будут слишком большие, Pro Mini сложнее подключать к компьютеру и соединять с остальными компонентами, а Leonardo требуют дополнительных навыков в программировании, они дороже и их основное преимущество (тесная интеграция с компьютером в качестве периферийного устройства) в данном случае не слишком востребована.
Есть еще вариант использования плат ESP8266 или ESP32, тогда в проекте появляется возможность управления машиной через WiFi. Но и сами платы и их программирование требует определенных навыков, в этой статье мы будем говорить преимущественно об Uno или Nano.
Конструкция, шасси и двигатели робота на Ардуино
Для того, чтобы что-то поехало или стало перемещаться, надо снабдить “это” колесами, гусеницами или манипуляторами-ногами. Вот тут выбор совершенно не ограничен, можно использовать совершенно любые комбинации и сочетания платформ. Как правило, в качестве начального варианта берутся уже готовые наборы платформ с Алиэкспресс.
 Двигатель, шасси и колеса машинки на ардуино
Двигатель, шасси и колеса машинки на ардуино
Если работать со стандартными наборами вам не интересно, можно создать платформу своими руками. Например, разобрать игрушечные радиоуправляемые машинки или любые двигатели на 5-12 вольт, с редукторами или без. Колеса можно создать и самим, что тоже является интересной задачей.
Драйвер двигателей
Ардуино – достаточно ранимое устройство, не терпящее больших нагрузок по току. Соединяя его с “брутальными” мощными двигателями, не избежать беды. Поэтому для нормальной совместной работы нам нужно будет включить в схему робота компонент, отвечающий за управление двигателями – подающий и отключающий ток на их обмотки. Речь идет о микросхеме или готовом модуле, которые называют драйвером двигателя. На нашем сайте есть статьи, посвященные драйверам, построенным на схеме H-моста. Если вы покупаете готовые шасси, то обязательно предусмотрите возможность размещения на них подходящего драйвера.
Красивый корпус
Как правило, вся конструкция автомобиля строится вокруг его шасси. Если посмотреть примеры готовых проектов, то они часто выглядят как “провода на колесиках” – внешний вид их изобилует пучками соединительных проводов, ведущих от восседающего на троне контроллера Ардуино к драйверам, моторам и датчикам. Между тем, красивый и функциональный корпус не только вызывает правильные эстетические чувства и помогает выделить вашу модель от остальных. Хороший корпус может превратить игрушку в реальное устройство, помогает привить навыки конструирования и промышленного дизайна, что важно для инженеров любого возраста.
Питание робота
Обеспечение правильной схемы питания – это то, что очень часто оказывается на последнем месте в списке приоритетов начинающих ардуинщиков. Между тем, именно ошибки в схеме электропитания становятся основными причинами проблем, возникающих в процессе работы умных устройств на Ардуино. Создавая ардуино-машинку нужно предусмотреть питание контроллера, двигателей, драйвера и датчиков. У всех них есть свои ограничения и особенности работы, требуется создать оптимальное по весу и сложности решение, позволяющее учесть все эти ограничения.
 Питание робота на Ардуино
Питание робота на Ардуино
Создавая по-настоящему автономное устройство робота, нужно побеспокоиться и о времени его работы, и о возможности быстрой подзарядки или смены батареек. Как правило, выбираются решения из следующих вариантов:
- Обычные батарейки AA. Тут нужно понимать, что платы Arduino Uno, Nano и большинство двигателей, используемых в Ардуино-робототехнике, требуют напряжения в диапазоне 6-9 вольт. Поэтому придется собрать вместе последовательно не менее 4 батареек на 1,5 В, причем сами батарейки должны быть хорошего качества и обеспечивать работу с достаточно большим током. Например, большинство солевых батареек этим критериям не удовлетворяют. Батарейки AAA при создании ардуино-машинок практически не используются из-за своей пониженной емкости (хотя могут использоваться в миниатюрных моделях, где размер имеет первостепенное значение).
- Аккумулятор AA. Здесь возникает еще большее ограничение по напряжению и току. Большинство аккумуляторов выдают напряжение 1,2 вольт, поэтому их требуется больше для “собирания” нужных нам 6-9 вольт. Несомненным плюсом является возможность перезарядки.
- Литиевые аккумуляторы 18650. Это уже “серьезная артиллерия”, позволяющая получить большое время автономной работы, возможность подзарядки и приемлемые характеристики по току и напряжению. Рабочее напряжение для таких элементов питания – 3,7 В, что позволяет собирать готовую схему питания всего из двух элементов.
- Другие источники питания. Сюда можно включить как более мощные и габаритные никель-металлгидридные, кадмиевые аккумуляторы, так и многочисленные литий-ионные “плоские” варианты, используемые в дронах, смартфонах или другой портативной цифровой технике.
Каким бы ни был источник питания, нужно обеспечить его надежное крепление, удобное расположение, защиту от воздействия недружелюбной окружающей среды. Если вы подключаете к одному источнику и контролер, и двигатели, и датчики, то нужно позаботиться о правильной схеме, включающей, например, надежную связь “по земле” всех устройств.
Где купить платформу и запчасти
Все, о чем говорится в этой статье, можно без проблем купить на всем известном сайте. К сожалению, подавляющее большинство предложений основываются на стандартной платформе 4WD автомобиля с двумя несущими планками, не очень надежными двигателями и колесами, любящими ездить в “развалочку”. Но эти варианты относительно не дороги и вполне подойдут для начала работы.
Источник