- Архив метки: atmega16
- Карта статей по микроконтроллерам AVR
- Подключение GPS модуля к микроконтроллеру AVR ATmega16/32
- Подключение двигателя постоянного тока к микроконтроллеру AVR ATmega16
- Подключение датчика Холла к микроконтроллеру AVR ATmega16
- Использование широтно-импульсной модуляции (ШИМ) в микроконтроллерах AVR ATmega16
- Передача Email с использованием микроконтроллера AVR ATmega16 и ESP8266
- Программирование микроконтроллеров AVR с помощью программатора USBASP и Atmel Studio 7.0
- Движущийся вдоль линии робот на микроконтроллере AVR ATmega16
- Как использовать аналогово-цифровой преобразователь (АЦП) в микроконтроллере AVR ATmega16
- Подключение шагового двигателя к микроконтроллеру AVR ATmega16
- Atmega16 схемы своими руками
Архив метки: atmega16
На данной странице представлены проекты, в которых используется микроконтроллер Atmega16 — один из самых сбалансированных микроконтроллеров по соотношения цена/возможности в семействе AVR
Карта статей по микроконтроллерам AVR

На данной странице представлена карта статей по микроконтроллерам AVR, опубликованным на нашем сайте «Мир микроконтроллеров». По мере добавления статей данной тематики данная карта статей также будет дополняться. Микроконтроллеры семейства AVR в настоящее время являются одними из самых популярных микроконтроллеров. Они … Читать далее →
Подключение GPS модуля к микроконтроллеру AVR ATmega16/32
GPS модули широко используются в современной электронике для определения местоположения, основываясь на координатах долготы и широты. Системы мониторинга транспортных средств, часы GPS, системы предупреждения о чрезвычайных происшествиях, системы наблюдения – это лишь небольшой список приложений, в которых может потребоваться технология … Читать далее →
Подключение двигателя постоянного тока к микроконтроллеру AVR ATmega16

Двигатели постоянного тока относятся к числу наиболее часто используемых двигателей. Их можно встретить где угодно – начиная от простейших конструкций до продвинутой робототехники. В этой статье мы рассмотрим подключение двигателя постоянного тока к микроконтроллеру ATmega16 (семейство AVR). Но сначала немного … Читать далее →
Подключение датчика Холла к микроконтроллеру AVR ATmega16
Принцип действия датчиков Холла основан на так называемом «эффекте Холла», открытым Эдвином Холлом (Edwin Hall) в 1869 году. Этот эффект гласит: «эффект Холла основан на явлении возникновения поперечной разности потенциалов (называемой также холловским напряжением) при помещении проводника с постоянным током … Читать далее →
Использование широтно-импульсной модуляции (ШИМ) в микроконтроллерах AVR ATmega16
Широтно-импульсная модуляция (сокр. ШИМ, от англ. PWM — Pulse Width Modulation) является технологией, позволяющей изменять ширину импульсов в то время как частота следования импульсов остается постоянной. В настоящее время она применяется в разнообразных системах контроля и управления, а также в … Читать далее →
Передача Email с использованием микроконтроллера AVR ATmega16 и ESP8266
ATmega16 (семейство AVR) является дешевым 8 битным микроконтроллером и имеет достаточно большое число интерфейсов ввода-вывода общего назначения. Он поддерживает все часто используемые в настоящее время протоколы связи такие как UART, USART, SPI и I2C. Он достаточно широко применяется в робототехнике, … Читать далее →
Программирование микроконтроллеров AVR с помощью программатора USBASP и Atmel Studio 7.0

Существует несколько способов программирования микроконтроллеров семейства AVR. В данной статье мы рассмотрим один из наиболее популярных в настоящее время способов программирования данных микроконтроллеров – с помощью программатора USBASP v2.0 и программы Atmel Studio 7.0. Хотя на нашем сайте уже есть … Читать далее →
Движущийся вдоль линии робот на микроконтроллере AVR ATmega16
Создание робота – это всегда волнующее событие для всех энтузиастов, увлекающихся электроникой. И это волнение усиливается если создаваемый робот может автоматически делать некоторые вещи без внешних команд. Одним из широко известных подобных роботов, доступных для создания новичками, является робот, движущийся … Читать далее →
Как использовать аналогово-цифровой преобразователь (АЦП) в микроконтроллере AVR ATmega16
Часто во многих конструкциях, использующих микроконтроллеры AVR, используется аналогово-цифровой преобразователь (АЦП) данных микроконтроллеров. Он используется везде где необходимо преобразовать какое-нибудь аналоговое значение в цифровое. Обычно это конструкции с датчиками температуры, датчиками наклона, датчиками тока, гибкими датчиками и т.п. На нашем … Читать далее →
Подключение шагового двигателя к микроконтроллеру AVR ATmega16

Шаговые двигатели – это бесщеточные двигатели постоянного тока, которую могут вращаться от 00 до 3600 дискретными шагами. С каждым управляющим сигналом ось такого двигателя поворачивается на фиксированное значение (шаг). Управление вращением подобных двигателей осуществляется последовательностью специальных сигналов. В отличие от … Читать далее →
Источник
Atmega16 схемы своими руками
Очень маленькое, но очень полезное устройство.
Автор: ELcat
Опубликовано 31.08.2012
Создано при помощи КотоРед.
Здравствуй, дорогой Кот! Позволь поздравить тебя с Днём рождения и от всей души пожелать рабочего вдохновения, творческих успехов ну и чтоб, как говорится, «всё Коту было Масленица»! А также преподнести тебе очень маленький скромный подарочек. Ой, а где же он? В кармане затерялся? Мяу-миу-рауж… О! Вот же он, «МИРАЖ».

Надеюсь, он тебе понравится и станет твоим верным спутником.

Каждый день мы куда-то торопимся, не успеваем, опаздываем. К сегодняшнему дню человечество изобрело массу всевозможных хронометров. От примитивных песочных и солнечных часов, до сложнейших, основанных на процессах квантовых переходов элементарных частиц, сверхточных атомных. Человечество даже научилось «из времени делать деньги», но, к сожалению, так и не освоило обратный процесс. Одним словом время – это то, чего нам всегда критически не хватает. И особенно для того, чтобы просто, никуда не спеша, свернуться калачиком и от всей души «придавить хорька». Конечно же, данный прибор не «растянет» вам время, но поможет его подсчитать, а значит экономно и с умом его использовать, с пользой для себя и окружающих.
Итак, что же за хронометр сегодня у нас? Идея систем отображения с механической развёрткой, отнюдь, не нова. Данные часы были разработаны чуть больше полугода назад, когда один из приднестровских котов опубликовал здесь свою статью с подобным прибором. Целью моей разработки было создать некое совершенное во всех отношениях устройство подсчёта времени, основанное на подобных принципах, но лишённое всех недостатков модели приднестровского товарища. Во избежание «переноса недостатков» как принципиальная схема, так и программный код разрабатывались с нуля. Да и не было желания «ковыряться» в чужом коде, хотелось разработать что-то своё, новое и совершенно отличное. Так, после двух месяцев творческих поисков и двух неудачных образцов появился «МИРАЖ». Уникальность данного устройства счёта времени заключается в его неимоверной простоте, дешевизне и столь модных сегодня минималистических тенденциях. Как говорят: «Всё гениальное должно быть просто!». Но, не смотря на это, данный хронометр умеет считать секунды, минуты, часы, числа, месяцы, годы, вычисляет дни недели по дате и добавляет по дню в високосные годы. Кроме того этот «малыш» довольно точен и экономичен. За полгода его работы уход времени составил не более двух минут, а элемент питания до сих пор не требует замены.
Из чего же он состоит? «Сердцем» устройства является излюбленный посетителями данного сайта 8-ми битный Flash микроконтроллер фирмы Atmel – ATmega8. Секрет сверхнизкого энергопотребления устройства заключается в том, что большую часть времени МК, как и положено всем порядочным котам, «дрыхнет»! Причём столь глубоко, что его ток потребления составляет при этом немногим более 8мкА! «А кто же тогда время считает?» – спросите вы. А всё дело в том, что в его составе имеется хитрый таймер-счётчик TC2, имеющий в своём составе независимый генератор тактовых импульсов с предделителем и возможностью подключения внешнего кварцевого резонатора. Вот он-то как раз и считает генерируемые генератором импульсы с частотой 32 786Гц, которая задаётся внешним опорным «часовым кварцем». Один раз в секунду происходит переполнение таймера и по данному событию он формирует сигнал прерывания, способный «разбудить» вычислительное ядро микроконтроллера. При пробуждении запускается внутренний калиброванный RC-осциллятор с делителем на 8, от которого и происходит тактирование ядра частотой порядка 1,2 МГц. При этом ток потребления скачком возрастает до полутора миллиампер. Ядро производит математические действия и снова уходит в спящий режим. Переполнение таймера – не единственное условие для пробуждения МК. Это также происходит и по нажатию кнопки «Wake». При этом МК в течение 5 секунд не уходит в спящий режим, ожидая действий пользователя, и выполняя алгоритмы пользовательского интерфейса. Если по истечению 5 секунд никаких действий не последует, МК снова уйдёт в режим сна.
Как пользоваться данным устройством? Элементарно! Держите устройство в руке горизонтально батареей к себе. Кратковременно нажмите кнопку «Wake» и начните совершать взмахи влево-вправо с частотой от 3 до 5 взмахов в секунду. Перед вами появится «виртуальное табло» с отображением текущего времени.

Ещё одно кратковременное нажатие, и на «табло» появится текущая дата.


И, наконец, эмблемка «МИРАЖ».

Для установки времени необходимо в режиме отображения времени нажать и удерживать не менее 2 секунд кнопку «Wake» до засвечивания нижнего светодиода. При взмахах появится:

Каждое кратковременное нажатие будет увеличивать отображаемый параметр на единицу. Ещё одно нажатие с удерживанием переключит в режим установки минут:

Отображаемый параметр изменяется аналогично. Следующее нажатие с удержанием сохранит установленное время и переключит в режим отображения времени. Если вы не желаете сохранять установленное время – просто не производите с устройством никаких действий в течение промежутка времени длительностью не менее пяти секунд. Устройство без сохранения перейдёт в спящий режим.
Аналогично устанавливается и дата. Необходимо перейти в режим отображения даты, далее нажатием с удержанием войти в режим установки даты. Далее производятся действия, аналогичные описанным выше как и при установке времени:



Ну чтож, без внимания остался лишь самый загадочный элемент устройства – это «датчик взмахов». Для удобства назовём его «акселерометр», хотя это и не совсем корректно.

Данный компонент изготавливается вручную. Для этого вам понадобятся напильник, паяльник, шило, кусачки-бокорезы ну и, конечно же, пара не очень кривых рук. За основу корпуса берётся планка штыревая типа PLD-80. От неё очень аккуратно откусываются 2 отрезка по 8 штырей. Все штыри вынимаются. В результате получается 16 штырей и 2 пластиковые детали. Далее 4 штыря изгибаются под прямым углом с отступом около 2мм от края и вставляются в одну из пластиковых деталей со стороны без углубления (см. фото).
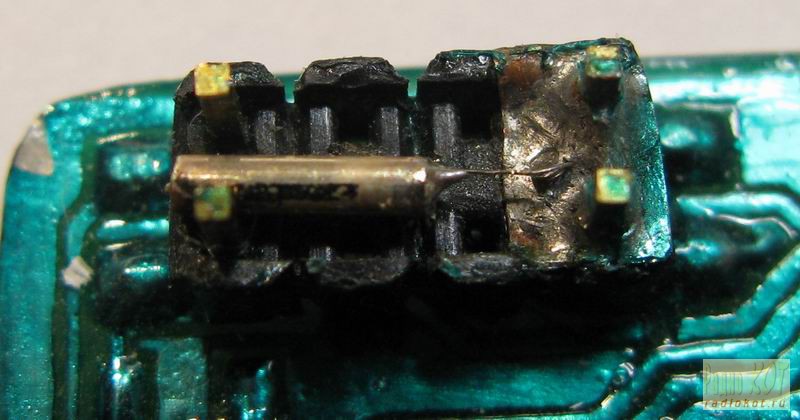
Из тонкой медной жести вырезается маленький прямоугольник, прокалывается шилом в двух точках так, чтобы при помощи полученных отверстий надеть его на одну из пар штырей. Надевается до упора, вдавливается, облуживается и припаивается к штырям.
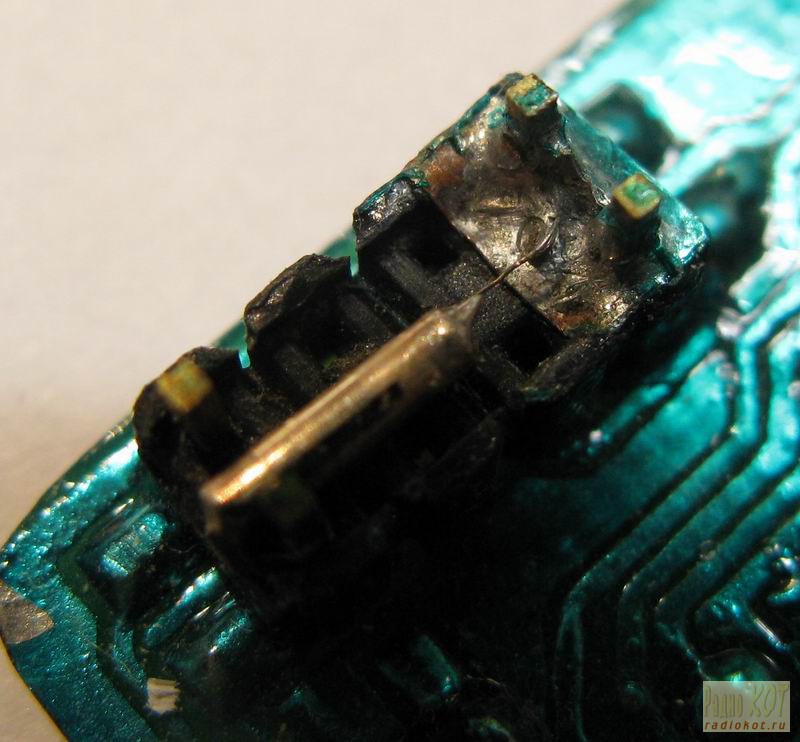
Сам чувствительный элемент «акселерометра» представляет собой грузик-контакт удерживаемый пружинкой. Под действием сил, вызванных ускоренем, он должен свободно двигаться между двух штырей-контактов и быть подпружиненным к контакту, расположенному по направлению взмаха, то есть влево, если представить плату в руке (на фотографии нижний справа).
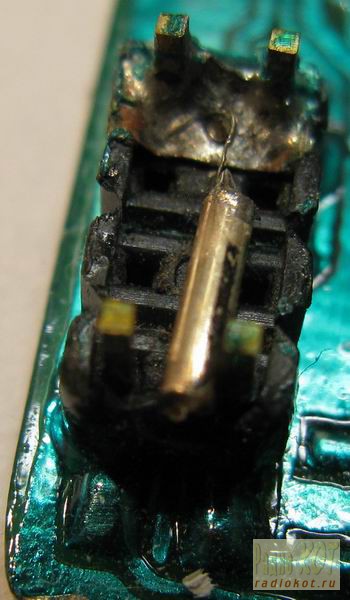
В качестве грузика используется кусочек медной или латунной проволоки сечением около 1,5мм с золотым или серебряным покрытием – идеально подходят кусочки контактов некоторых старых «совковых» разъёмов. В качестве пружинки применена струнка, выпаянная из оптической головки лазерного CD/DVD привода. На таких струнках подвешиваются подвижные пластиковые рамки с обмотками и микролинзами. Пружинка должна иметь 1-1,5 витка (подбирается экспериментально), навивается на оправке диаметром около 1мм (вывод какого-нибудь выводного элемента с соответствующим сечением). Одним кончиком пружинка припаивается к грузику, на другом формируется «петелька», которая припаивается к медному прямоугольнику. Далее на штыри надевается вторая пластиковая деталь углублением вниз, образуя таким образом «крышечку коробочки» со всей «механикой» внутри. Далее «крышечку» необходимо снять, аккуратно подгибая пружинку тонким пинцетом, необходимо добиться, чтобы груз не касался верхней или нижней стенки коробочки, а был слегка прижат к левому контакту («крышечка» для проверки периодически устанавливается на место). Таким образом в собранной конструкции при взмахах грузик будет ударяться только о боковые штыри-контакты.
После регулировки и сборки верхние выступы штырей обкусываются кусачками и стачиваются напильником. Далее акселерометр ставится всеми четырьмя контактами на напильник и производится стачивание контактов до толщины не более 0,3-0,5мм, после чего он готов к пайке на плату. После пайки акселерометр необходимо самым тщательным образом промыть средством для удаления флюса и грязи. При определённой сноровке пластиковые детали корпуса также можно очень сильно утонить, получив акселерометр почти крохотных размеров.
Жёсткость пружинки и сила прижима грузика окончательно доводятся после сборки и прошивки устройства по корректности развёртки изображения. При очень мягкой пружинке левая или правая сторона растра «сминается», при слишком жёсткой акселерометр перестаёт реагировать на взмахи, растр появляется не при каждом взмахе или не появляется вообще.
Номинал резисторов R1-R8 выбирается в соответствии цвета устанавливаемых светодиодов (точнее от заявленного напряжения их переходов). Для синих, белых, и ultra bright зелёных – 8-16 Ом, для красных, жёлтых и зелёных обычных – порядка 47-56Ом. Также хочу обратить ваше особое внимание на то, что микроконтроллер ATmega8A-AU по ряду его архитектурных особенностей в данной конструкции не применим. Устройство будет корректно работать только с МК ATmega8-16AU и ATmega8L-8AU.
Также напомню об обязательном соблюдении правил антистатической безопасности при работе с микроэлектроникой. После сборки и монтажа не забывайте тщательно мыть платы специализированными средствами для удаления флюса и грязи. Перед включением проверьте плату на наличие непропаев, обрывов и закороток. Готовую плату можно покрыть лаком, например «Цапонлак» или «Plastik». Следите, чтобы остатки паяльного материала и лак не попали в акселерометр.
Всем желаю удачи, хорошего настроения и побольше свободного времени!
Фузы, прошивка и плата(SL5.0) находятся в архиве.
Источник