- Собираем персональный радар малого радиуса действия
- Панорамный пассивный радиолокатор
- Устройство
- Эксперимент №1 – панорамный радиоснимок комнаты
- Эксперимент №2 – радиоснимок из окна
- Эксперимент №3 — радиоснимок человека
- Эксперимент №4 – радиоснимки лампочек
- Самодельный радар с монитором на Ардуино
- Исходный код
Собираем персональный радар малого радиуса действия
Идея создания некоего подобия радара для определения расстояния пришла одному из моих студентов. Мы продолжили ее разработку и решили ввести в программу курса в качестве одного из проектов.

После пары недель подготовки мы, наконец, определились, как его начинать и что для этого может понадобиться. Проект не должен был быть очень продвинутым; мы установили средний уровень сложности. Ниже представлен пример использования персонального радара узкого диапазона. Он и должен был выглядеть немного смешно, так что можете смеяться!
Описание и цель проекта
Целью проекта было создание функционирующего радара. От системы требуется лишь измерять расстояние под углом в 90 градусов, как показано в примере выше. В зависимости от выбранного сенсора, система функционирует в пределах 4-30 см, 20-150 см и 1-5,5 м.

Результаты проекта повлияют на последующие разработки, в которых мы попытаемся интегрировать радар для навигации мобильных роботов в естественных условиях.
Электронные детали
- Стабилизатор напряжения LM7805 5 В
- Микроконтроллер PIC18F452
- ИК Сенсор GP2D120
- Кварцевый резонатор на 4 или 8 MHz
- Переключатель
- Конденсатор
- 30-тиконтактный разъем
- 5 триггеров 74LS373
- Макетная плата
- Припой
- 36 индикаторов
- Провод 30 AWG
- Инструменты для работы с проводами
- Паяльник
Подробный список запчастей
Вы можете знать, а можете и не знать всего относительно вышеперечисленных деталей, поэтому, чтобы помочь разобраться в них, было включено изображение каждой детали. Появились три новых объекта, не указанных до этого в проекте: сервосистема, 74HCT373 и ИК сенсоры. Скоро появится описание и ИК датчиков; что касается 74HCT373 — ниже будет пред ставлен краткий обзор. Вы всегда можете свериться с спецификацией микросхем, просто задав поиск по запросу «74HCT373».
74HCT373
74HCT373
Восьмиразрядная микросхема, содержащая в себе трехстабильный триггер. Проще говоря, данный чип способен хранить 8 бит цифровой логики и удерживать в памяти до стирания или изменения ее посредством LE-Latch Enable вывода.
Принципы работы
- Управляющие выводы LE и OE
- 8 Ввод данных D0-D7
- 8 Вывод данных D0-D7
Питание (Vcc & GND.)
Активация вывода (ОЕ) позволяет Q0-Q7 выводить данные на данный момент находящиеся в D-триггерах.
Активация триггера (LE) позволяет перезапись данных, содержащихся на D0-D7, в D- триггер.
Обзор схемы
Схема для данного проекта намного сложнее предыдущих. В нашей разработке есть 4 основных преимущества.
- Мы сможем программировать изображения с разрабатываемой платы.
- Мы будем контролировать сервосистему.
- Мы будем снимать данные с ИК сенсора расстояния.
- Мы установим 36 LEВ индикаторов для отображения вывода данных, полученных с ИК сенсора.
- Питание осуществляется через аккумулятор на 9В, подключенный к LM7805 с конденсатором 1uF, подключенным к выводу/заземлению для обеспечения бесперебойного постоянного тока LM7805.
- Программный цикл
- Программирование осуществляется посредством подсоединения двух разъемов от контроллера к программатору, предоставляя первому разъему программатора доступ к MCLR*/Vpp-Pin1 на контроллере. В целях безопасности установлен выпрямительный диод.
- ИК Сенсор Расстояния
- ИК Сенсор использует один разъем контроллера PIN 2 — RA0. Используются аналоговые возможности этого вывода для получения значения АЦП, так как с ИК сенсора снимается только аналоговый сигнал. Данное значение сообщает, есть ли что-то в радиусе охвата сенсора.
В общей сложности еcть 40 LED индикаторов. Каждый чип 74HCT373 контролирует до 8 индикаторов; так как 40/8=5, нам нужно 5 схем 74HCT373, чтобы управлять всеми 40 индикаторами. Необходимо отметить на схеме, что для всех 5 чипов используется одна шина данных.
Данная разработка использует три основных прибора для создания персонального радара. ИК сенсор подключается к микроконтроллеру, и затем выводится на сегмент индикаторов. Предоставляется наглядная демонстрация этого процесса:
Использование разных сенсоров
Важным аспектом в точности ИК сенсоров, используемым в данном проекте является то, что они имеют одинаковые характеристики напряжения, поэтому данная программа совместима со всеми индикаторами. Единственное, что необходимо знать, — как используется сенсор для определения расстояния, выводимого на индикаторах.
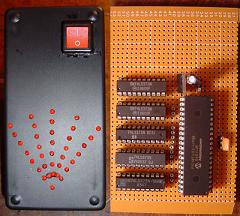
Итак, взглянем на окончательный вид прибора:

Таков внешний вид собранного прибора. Перейдем к следующему разделу и продолжим сборку прибора.
Пластиковый корпус внизу на картинке не упоминался в списке запчастей. Это обычный корпус, который можно приобрести у любого производителя или продавца электроники. В первую очередь необходимо просверлить 36 отверстий для индикаторов в схеме и закрепить в них индикаторы. Перед вставкой индикаторов в отверстия было использовано закрепляющее вещество.

После того, как панель спаяна, начинаем подключение схемы. Каждый проводок нужно подключить сквозь маленькое отверстие корпуса.
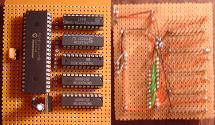
Рисунок выше отображает вид панели на ранней стадии. В начале подключения проводов наблюдается скопление огромного их количества, например, вот так:
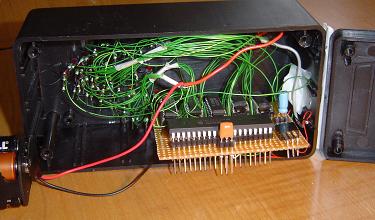
Последним штрихом в разработке персонального радара является возможность его использования он-лайн. Используются провода длиной 2-4-метра при подключении сервосистему и ИК сенсор. Проделываем отверстие спереди корпуса для данных проводов:

Последним штрихом в разработке персонального радара является возможность его использования он-лайн. Используются провода длиной 2-4-метра при подключении сервосистему и ИК сенсор. Проделываем отверстие спереди корпуса для данных проводов:
Покончив со сборкой перейдем к программной части разработок. Это, безусловано, более тонкая часть разработки, чем даже прокладывание проводов.
Программное обеспечение для данного прибора включает три основных части:
- Управление Сервосистемой
- Управление LED-индикацией
- ввод A/D/
Поскольку все программное обеспечение данного проекта не поместится на одной странице, будет объяснено, что это за части и как они работают.
Управление Сервосистемой
Управление сервосистемой осуществляется таймерами и прерываниями. Двумя отдельными прерываниями, срабатывающими одновременно для создания желаемого звука, генерируется сигнал в 50 Ггц, и указатель сервосистемы двигается маленькими шагами регулируя скрипящий звук.
Регулирование LED индикации.
Индикаторы регулируются триггерами 74LS373/74HCT373. Система постоянно обновляет данные триггера, выводимые на индикаторы.
А/Ц Ввод
ИК сенсор осуществляет аналоговый вывод. Используется конвертор для определения значения напряжения, сообщающий, что объект вышел на расстояние вне зоны действия ИК сенсора.
Завершена сборка и настройка прибора — нужно протестировать его. В заисимости от используемого вами сенсора, индикация будет разная. Сенсоры на выбор GP2D120, GP2Y0A21YK и GP2Y0A700K0F.
Данные и наблюдения
Первым тестом радара будет тест на близком расстоянии. В качестве препятствий были использованы консервные банки.
На втором видео (на первой страничке) тестируются индикаторы 20 см — 150 см и 1 м — 5.5 м, позволяющие преодолевать более серьезные препятствия. Посмотрите, чтобы понять, о чем идет речь.
Два видеоролика продемонстрируют работу сенсора, однако при самостоятельной сборке возможны небольшие затруднения, которые будут описаны в заключении.
Обзор персонального радара
Сборка и настройка данного прибора занимает немного времени. Это проект, который вы сможете за день, и он уже имеет нишу в применении, но с течением времени будут возникать дополнительные трудности. ИК сенсоры могут становиться ненадежными, результаты вывода могут быть малыми из-за влияния среды и окружения.
Действия, которые нужно предпринять
Для увеличения радиуса охвата сенсора планируется использование ультразвуковых датчиков, эквивалентных описанным выше «звуковым сенсорам», передавая данные о расстоянии от вас до объекта. Диапазон ультразвука шире чем у инфракрасного излучения, и он более надежен в неблагоприятных условиях.
Заключение
Проект был увлекательным изучением сенсоров ИК излучения. Он демонстрирует, что результаты могут быть получены и использованы реально. Многие дальнейшие проекты могут быть разработаны на базе этого.
Источник
Панорамный пассивный радиолокатор
В этой статье я хочу рассказать об очередном эксперименте с пассивным панорамным радиолокатором. Предыдущие эксперименты описаны в статьях «Радиотелескоп» и «СВЧ пассивный радиотеплолокатор в диапазоне 10 ГГц».
Первые панорамные радиоснимки были получены с помощью сетчатой параболической антенны диаметром 1,8 м установленной стационарно.
Следующий радиолокатор не был панорамным, т.е. он мог работать только в азимутальной плоскости. Зато он позволил поэкспериментировать, как в плане механики и электроники, так и в плане использования антенн малого диаметра. Сначала было не понятно – будут ли эффективны зеркала диаметром около 50 см при приёме собственных шумов объектов?
После первых экспериментов сразу стало ясно, что это вполне возможно и меня посетила мысль сделать небольшой мобильный панорамный радиолокатор с антенной диаметром 50 см.
Устройство
Для опоры я использовал треногу от оптического телескопа, которую заимствовал у товарища. Поворотный механизм собран из двух червячных редукторов, к которым подсоединены моторедукторы со встроенными датчиками.
На выходном фланце поворотного механизма закреплена прямофокусная антенна диаметром 50 см. В фокусе установлен конвертер от спутникового телевидения.
Сигнал с конвертера поступает на усилитель высокой частоты, затем на амплитудный детектор и далее на усилитель постоянного тока. После усилителя сигнал оцифровывается однобайтным АЦП. Контроллер пульта управления поворотным механизмом по запросу компьютера считывает положение антенны, опрашивает АЦП и отправляет эти данные обратно в компьютер.
Управляющая программа в компьютере сначала подготавливает задание в соответствии с заданными координатами панорамы, а затем, по мере надобности отправляет нужные координаты пульту управления.
Одновременно с этим компьютер постоянно (каждые 20 мс) отправляет запросы о положении антенны и уровне сигнала. На основе этих данных и рисуется картинка в окне программы.
Эксперимент №1 – панорамный радиоснимок комнаты

На самом деле это пол комнаты. Середина снимка это угол комнаты. Соответственно на левой стене два окна и на передней стене два окна. Левые окна выходят не на улицу, а на застеклённый балкон (это восток). Передняя стена смотрит на юг и окна выходят прямо на улицу.
Что видно на этих снимках:
А. В крайнем левом окне, вертикальная полоса справа – это часть рамы этого окна, а вертикальная полоса слева – это часть рамы окна балкона. В соседнем окне всё тоже самое. Два окна слева кажутся меньше по высоте по сравнению с окнами в правой части снимка. На самом деле они одинаковые по размеру. В окнах слева, сверху сильно светит потолок балкона.
Б. Окна в правой части радиоснимка. В окне, которое ближе к центру, вертикальная полоса – это часть рамы окна. Внизу окна видна крыша соседнего дома. В крайнем справа окне тоже просматривается часть рамы и ещё видна светлая полоса идущая от верхнего левого угла, практически по диагонали вниз. Я точно не уверен, но подозреваю, что так виден размазанный сигнал от спутников на геостационарной орбите.
Эксперимент №2 – радиоснимок из окна
Этот радиоснимок я делал, установив антенну непосредственно перед окном.
Внизу снимка видна крыша соседнего дома. Вертикальная полоса справа – это часть рамы окна. Светлая дуга по середине снимка идущая слева на право – это размазанные сигналы со спутников, а источники этих сигналов можно увидеть слева (светлое пятнышко) и справа (светлое расплывшееся пятно).
Эксперимент №3 — радиоснимок человека
Экспериментируя с портативным радиометром я обнаружил, что тело человека тоже излучает радиошум.
Однако с помощью такого радиометра радиоснимок не сделаешь. Теперь у меня появилась такая возможность и этот эксперимент для меня оказался наиболее интересным. Я сделал несколько радиоснимков самого себя. Оказалось, что тело человека сильно светится в радиодиапазоне.
На левом снимке я стою с опущенными руками, на среднем руки раздвинуты в стороны и на правом руки подняты вверх. Для чистоты эксперимента я снял с себя одежду, чтобы быть уверенным в том, что излучает именно тело, а не одежда.
Эксперимент №4 – радиоснимки лампочек
Я не стал делать картинки радиоснимков лампочек. Эксперимент проводился над энергосберегающей лампочкой, светодиодной и обычной (накаливания). Энергосберегающая лампа ярко светит в диапазоне 10 ГГц, чего не скажешь об остальных лампочках. На видео можно увидеть, как я делал радиоснимки и лампочек в том числе.
Сейчас я наметил следующие эксперименты по теме пассивной радиолокации, но несколько на другом оборудовании. Это будет другая статья.
Источник
Самодельный радар с монитором на Ардуино
Не знаю кто как, но я давно хотел сделать радар, такой чтоб туда-сюда излучатель крутился и на экране видно было наличие и дистанцию до объектов. Конечно в домашних условиях вещь, подобную военным или авиа службам сделать не получится — там и мощности, и размеры недосягаемые. Но что-то похожее, причём совсем не сложное и не дорогое (пару тысяч рублей) соорудить возможно. Итак, на основе популярного Ардуино вы можете сделать такую себе мини РЛС с помощью ультразвукового детектора и собственно платы Arduino. Схема подсмотрена на сайте «Мехатроник». Все, что нужно для этого проекта: ультразвуковой датчик для обнаружения объектов, маленький серводвигатель для поворота датчика и плата Arduino для управления ими. Ну и макетка с проводами.

Сначала сделаем крепление для подключения ультразвукового датчика к серводвигателю. Изготавливаем его, как это показано на рисунке ниже, потом он приклеивается и крепится к двигателю с помощью винта.

Теперь прикрепите штырьки, на которые припаяем 4 провода для подключения датчика.

Прикрепите мотор сервопривода к плате Arduino, используя обычную резинку для волос.

Мы подключили ультразвуковой датчик HC-sr04 к выводам 10 и 11, а серводвигатель к 12 контакту на плате Arduino.

Исходный код
Теперь нужно взять код и загрузить его на плату Ардуино, которая позволит взаимодействовать между Arduino и обработкой сигнала. Здесь будем получать значения для угла и расстояние, измеренное с помощью датчика с платы Arduino на обработку IDE с помощью функции SerialEvent(), которая считывает данные из последовательного порта, и будем ставить значения угла и расстояния в переменные iAngle и iDistance. Эти переменные будут использоваться для построения линии обнаружения объектов.
void drawRadar() <
pushMatrix();
translate(960,1000); // moves the starting coordinats to new location
noFill();
strokeWeight(2);
stroke(98,245,31);
// draws the arc lines
arc(0,0,1800,1800,PI,TWO_PI);
arc(0,0,1400,1400,PI,TWO_PI);
arc(0,0,1000,1000,PI,TWO_PI);
arc(0,0,600,600,PI,TWO_PI);
// draws the angle lines
line(-960,0,960,0);
line(0,0,-960*cos(radians(30)),-960*sin(radians(30)));
line(0,0,-960*cos(radians(60)),-960*sin(radians(60)));
line(0,0,-960*cos(radians(90)),-960*sin(radians(90)));
line(0,0,-960*cos(radians(120)),-960*sin(radians(120)));
line(0,0,-960*cos(radians(150)),-960*sin(radians(150)));
line(-960*cos(radians(30)),0,960,0);
popMatrix();
>
Для рисования линии, которая движется вдоль радара, сделана функция drawLine(). Переменная iAngle используется как линия, что перерисовывается для каждой ступени.
void drawLine() <
pushMatrix();
strokeWeight(9);
stroke(30,250,60);
translate(960,1000); // moves the starting coordinats to new location
line(0,0,950*cos(radians(iAngle)),-950*sin(radians(iAngle))); // draws the line according to the angle
popMatrix();
>
Для прорисовывания обнаруженных объектов служит функция drawObject(). Она получает расстояние от ультразвукового датчика, преобразует его в пикселах, и в сочетании с углом датчика рисует объект на радаре — экране ЖК монитора.
void drawObject() <
pushMatrix();
translate(960,1000); // moves the starting coordinats to new location
strokeWeight(9);
stroke(255,10,10); // red color
pixsDistance = iDistance*22.5; // covers the distance from the sensor from cm to pixels
// limiting the range to 40 cms
if(iDistance
| ||
 Усилитель мощности звука на транзисторах, из радиоконструктора DJ200. Проверка работы схемы.
Усилитель мощности звука на транзисторах, из радиоконструктора DJ200. Проверка работы схемы. Импульсные стабилизаторы напряжения AIMTEC AMSR и AMSRI — отличная замена для популярных 78xx / 79xx микросхем.
Импульсные стабилизаторы напряжения AIMTEC AMSR и AMSRI — отличная замена для популярных 78xx / 79xx микросхем. Схема простого кварцованного передатчика FM диапазона на мощность до 0,2 Вт, при питании от 12 В.
Схема простого кварцованного передатчика FM диапазона на мощность до 0,2 Вт, при питании от 12 В.