- roboforum.ru
- Робот газонокосилка своими руками. Ardumower mini
- Робот газонокосилка своими руками. Ardumower mini
- Re: Робот газонокосилка своими руками. Ardumower mini
- Re: Робот газонокосилка своими руками. Ardumower mini
- Re: Робот газонокосилка своими руками. Ardumower mini
- Re: Робот газонокосилка своими руками. Ardumower mini
- Re: Робот газонокосилка своими руками. Ardumower mini
- Re: Робот газонокосилка своими руками. Ardumower mini
- Re: Робот газонокосилка своими руками. Ardumower mini
- Re: Робот газонокосилка своими руками. Ardumower mini
- Re: Робот газонокосилка своими руками. Ardumower mini
- Re: Робот газонокосилка своими руками. Ardumower mini
- Re: Робот газонокосилка своими руками. Ardumower mini
- Re: Робот газонокосилка своими руками. Ardumower mini
- Re: Робот газонокосилка своими руками. Ardumower mini
- Re: Робот газонокосилка своими руками. Ardumower mini
- Arduino.ru
- Робот газонокосилка с хорошим алгоритмом, аналог Bosch или Robomow
- Ardumower: делаем автоматическую газонокосилку своими руками
roboforum.ru
Технический форум по робототехнике.
- Список форумов‹Мастерская‹Наши проекты
- Изменить размер шрифта
- Версия для печати
- Магазин
- Правила
- Wiki
- FAQ
- Регистрация
- Вход
Робот газонокосилка своими руками. Ardumower mini
Робот газонокосилка своими руками. Ardumower mini
5m0 » 09 фев 2017, 13:52
Здравствуйте. Давно хотел сделать робокосилку, то начинал, то бросал, но накосившись летом газона, получил мотивацию для продолжения работы над роботом газонокосилкой 
Понравилась тема forum10/topic6195.html
Решил за основу взять DIY проект Ardumower.de
Начать решил с «тестовой» версии, благо основные комплектующие имелись (тележка, мега, сонар, драйвер двигателя, БТ)
На выходе получил почти такого таракана, только без датчика периметра (это черная пипка спереди на полиморфусе) 
Скачал последнюю «прошивку» 1.0a6-Azurit
Указал в конфиге, что у меня мини, в коде оказались ошибки, потанцевал с бубном, вгрузил. и тишина.. в смысле ничего не происходит (лопасти/колеса не крутятся, только бипер (установленный при сборке мини ардумовера) противно пищит. Писк оказалось это фигня-проблема, решилась быстро. Начал проверять все компоненты по отдельности, дальномер, кнопка, бипер, моторы, синий зуб (не проверил) с тестовыми скетчами работают.
Сейчас копаю основной код. Сегодня наткнулся на раздел Troubleshooting
Вечером надо будет через консоль посмотреть на показания датчиков, может что увижу.
Энтузиастов прошу помощи, у многих есть для этого все необходимое. Вот привел список, что минимально понадобится
Даже если вам не нужен робот газонокосилка, проект имеет большой потенциал и алгоритм можно использовать в других проектах, например в роботе пылесосе.
На вскидку из полезняшек, что там есть:
алгоритм отслеживания уровня заряда/разряда и отправка робота на подзарядку;
навигация с использованием gps модуля;
одометрия;
защита от перегрузок (когда например заклинит двигатель);
управление через wi-fi;
и т.д.
Собирайте, скачивайте код и будем вместе осваивать.
Re: Робот газонокосилка своими руками. Ardumower mini
SkyStorm » 09 фев 2017, 14:49
Re: Робот газонокосилка своими руками. Ardumower mini
=DeaD= » 09 фев 2017, 15:05
С трудом представляю газон, который можно косить таким. хм. суровым аппаратом 
PS: В дальнейшем возможно тоже буду строить газонокосилку, как только до газонов дойду.
Re: Робот газонокосилка своими руками. Ardumower mini
5m0 » 09 фев 2017, 15:56
Проект уже полностью развился в первоначальном виде. Из последнего в 16 году они довели до идеала движение вдоль сигнального провода без рывков и нахождение базы.
Сейчас в связи с «очередной» революцией в мобильных телефонах, а именно разработки гуглом проекта Танго, ребята из ardumower сделали пробу навигации и определения границ смартфоном со встроенным танго-модулем, выглядит многообещающе, я сказал бы что это прорыв.
вот в своем блоге писал про это http://amarok2012.blogspot.ru/2017/02/ardumower-vision-concept-study-1m-x-2m.html
Но это дело отдаленного будующего, а меня интересует наступающий летний сезон
Добавлено спустя 7 минут 20 секунд:
=DeaD= писал(а): С трудом представляю газон, который можно косить таким. хм. суровым аппаратом
PS: В дальнейшем возможно тоже буду строить газонокосилку, как только до газонов дойду.
MINI ardumower с виду суров, но его не планируется выпускать пастись. Его удел ковровые пастбища, он это первый шаг к его большому собрату:
https://youtu.be/AauOetOp00U
В видео обратите внимание на идеально стриженный газон. Кстати год 2014.
Re: Робот газонокосилка своими руками. Ardumower mini
=DeaD= » 09 фев 2017, 22:45
Re: Робот газонокосилка своими руками. Ardumower mini
5m0 » 10 фев 2017, 18:31
Эх сколько таких планов не реализовано. Теоретически не лишено смысла, но
1. нужны камеры (вопрос снимается если делать видео наблюдение на участке)
2. нужен компьютер (вопрос снимается если это дом постоянного проживания)
3. от базовых датчиков наверное все равно не избавится, либо писать какие то супер сложные алгоритмы компьютерного управления.. например динамическая помеха в виде кота, в простом случае бампер или ультразвуковой датчик, а в случае с камерой непонятно..
4. софт будет на порядок сложней
Это так мысли в слух, обсуждать и теоретизировать не будем, а то уйдем в сторону. Лето скоро. Нужно сосредоточится на главном
Добавлено спустя 3 часа 1 минуту 37 секунд:
Ardumower DW1000 ( ‘беспроводной периметр’)
Для тех кому лень прокладывать сигнальный провод, смотрите следующее видео про беспроводной периметр
Итак наконец то мой бот поехал. Теперь нужно разобраться с модулем BT.
Re: Робот газонокосилка своими руками. Ardumower mini
ilalexey » 10 фев 2017, 18:54
Re: Робот газонокосилка своими руками. Ardumower mini
5m0 » 10 фев 2017, 21:04
Теоретически все можно автоматизировать. Не понятно с фото какой размер ростков.
А так ультразвуковые датчики, минимум 3шт (центр, левый, правый). Если не сработает ультразвуковой датчик, то механический бампер.
Если что-то большое (пруд, клумба с бабушкиными пионами) то можно обойти сигнальным проводом. 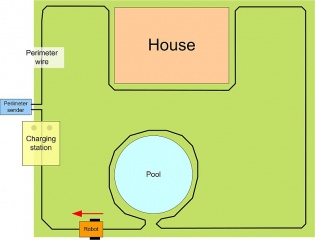
Я уже все ценные растения/кусты обнес бордюром, так как триммером часто скашивал культурные растения.
Re: Робот газонокосилка своими руками. Ardumower mini
ilalexey » 10 фев 2017, 21:58
Молодая сосна тоньше и ниже сухого(жёсткого) сорняка. На таком сорняке бензокосу за сезон угрохал. Сосенка помягче будет.
Добавлено спустя 49 минут 12 секунд:
..0.7га. Провод по периметру не пройдёт — то кабаны, то косули, то местные шастают. Ландшафт очень битый.
Добавлено спустя 2 минуты 1 секунду:
Re: Робот газонокосилка своими руками. Ardumower mini
5m0 » 13 фев 2017, 00:31
Re: Робот газонокосилка своими руками. Ardumower mini
5m0 » 21 фев 2017, 23:16
Прикрутил оптопары от принтера. Подробности здесь
Поехал ровнее, но медленнее. Думаю ставить или не ставить модуль с гироскопом, акселерометром GY-521
Вот нашел видео как ардумовер мини ездит с гироскопом/акселерометром
https://youtu.be/bA2sRMLeSjg
Re: Робот газонокосилка своими руками. Ardumower mini
5m0 » 28 фев 2017, 23:19
Итак подошел к самому интересному — ограничителю периметра для робота газонокосилки. Его буду делать по традиционной технологии — сигнальным проводом. По данному проводу передается сигнал и он служит своего рода «виртуальным забором», на роботе стоит приемник сигнала.
Как обнаруживается сигнал? Сигнал обнаруживает приемник катушка. Чем ближе расстояние между катушкой и контуром периметра, тем выше уровень сигнала. Кроме того, когда робот пересекает контур периметра: сигнал изменяет свою полярность.
Контур состоит из сигнального провода и «отправителя» сигнала.
Отправитель принцип действия:
Отправитель генерирует выходной сигнал, используя Arduino Nano (около 3 кГц)
Сгенерированный сигнал усиливается с помощью привода мотора, выходной драйвер двигателя подсоединен к периметру провода (вместо двигателя)
Приемник принцип действия:
Катушка принимает сигнал
Сигнал усиливается с помощью операционного усилителя (LM386)
В Arduino Mega образцы сигнала, преобразуются используя его аналого-цифрового преобразователь (АЦП) при 9615 Гц
Цифровой сигнал фильтруют с помощью цифрового фильтра
Собрал тестовый передатчик приемник по вот такой схеме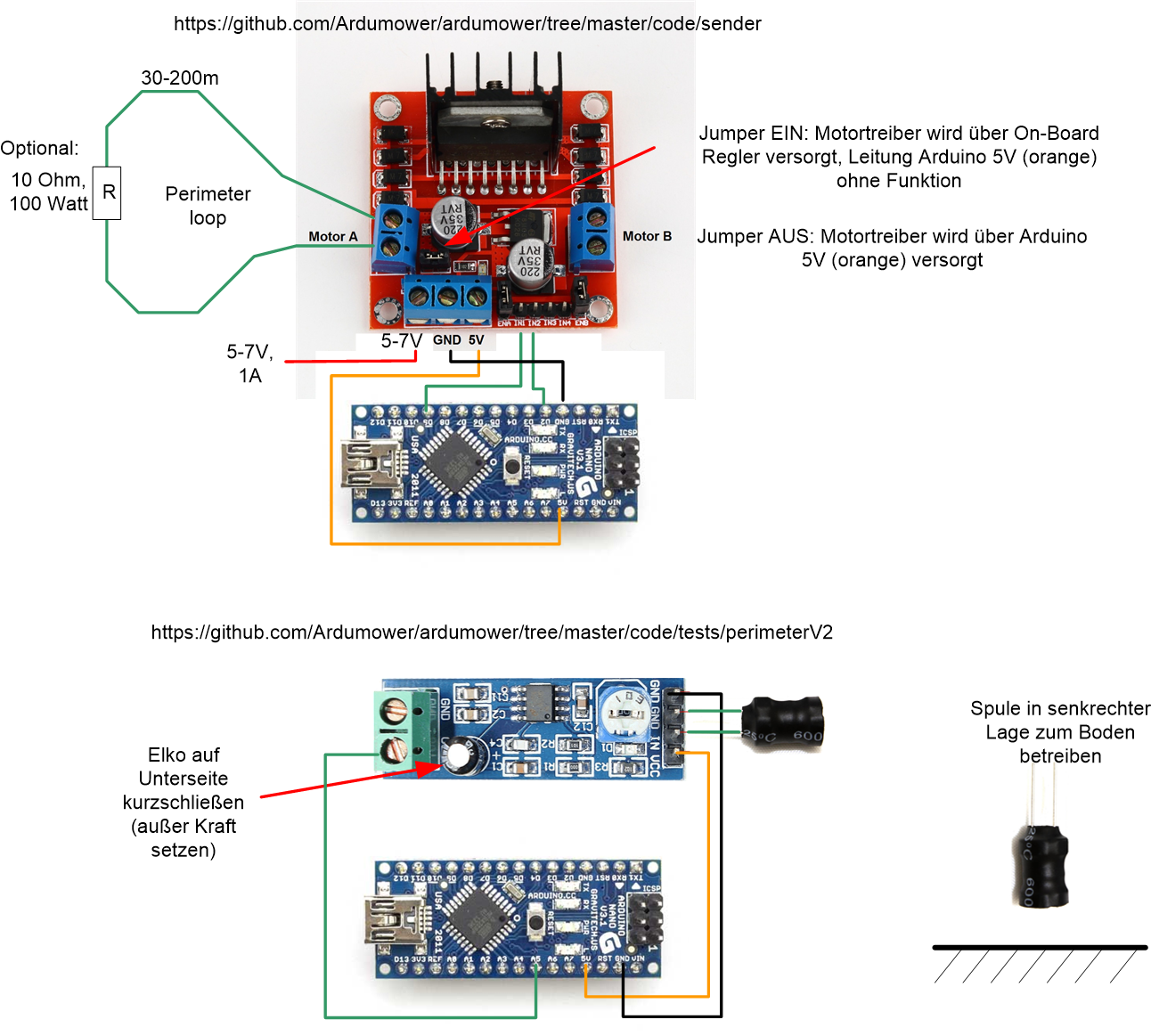
Более подробную информацию смотрите в блоге
Сигнального провода полноценного не было, присоединил кусок двухметровый, не терпелось опробовать. Залил скетч, открыл монитор порта, какие то цифры бегут, но похоже не работает, закономерности нет, буду разбираться. По длине сигнального провода и по сопротивлению есть рекомендации не менее 30м и не более 200м. По катушке не понятно на какую индуктивность они используют, то ли 100микро генри (100мкГн), то ли 100 мили генри (100мГн), у меня на 100 микро генри (мкГн) с софтом тоже надо разобраться.
Кому интересно смотрите исходники на сайте
Обсуждаем, может вместе докопаемся до сути.
Re: Робот газонокосилка своими руками. Ardumower mini
5m0 » 11 мар 2017, 22:41
Re: Робот газонокосилка своими руками. Ardumower mini
ilalexey » 11 мар 2017, 23:00
Re: Робот газонокосилка своими руками. Ardumower mini
5m0 » 10 апр 2017, 10:29
Источник
Arduino.ru
Робот газонокосилка с хорошим алгоритмом, аналог Bosch или Robomow
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Вот глядя на конский ценник хороших косилок задумался на полном серьёзе собрать (для начала на бумаге) робота газонокосильщика. Для меня он более чем актуален.
Какие затруднения я предвижу:
1. нужно два колеса с редукторами влагозащищенными большого диаметра
2. периметр контролировать пожалуй лучше также как у больших дядек — проводом с переменным напряжением по границе, соответственно нужно будет в устройство вмонтировать несколько датчиков по его периметру
3. в интернете куча алгоритмов закрашивания, можно использовать стандартный метод. Робот «закрашивает» участок, если села батарейка — едет на базу, заряжается и потом возвращается в место где до этого бросил работу
Первоначально обучаемся — обходим периметр по проводу, каждая смена направления фиксируется в памяти как вершина многоугольника. Провод достаточно сложно выложить кругом, обычно всё равно делается многоугольник, даже если огибается что-то крулое.
4. контроль пройденного расстояния — достоверный контроль, потому что устройство должно четко построить для себя границу участка и понимать где оно находится. Первое что приходит в голову это учет кол-ва поворотов каждого из ведущих колёс, но тут мне кажется собака зарыта, как по мне — на сегодня это самый сложный момент в реализации. В качество его воплощения упирается всё устройство. Если робот не будет знать где он, он не сможет нормально строить маршрут закрашивания, да и обучение не пройдет.
5. Интересный момент — у оригинального робота можно выделять островки с деревьями и тп — достаточно проложить два провода рядом до дерева — и сделать петлю в 1 провод вокруг него ==0 типа такого, соответственно робот через 1 провод проехать не может, а через два параллельных на расстоянии 1-2 см может. Я так думаю он по силе электромагнитного поля понимает что там два провода, а не один.
6. Много периметров. В стандартной системе у БОШа поддерживается только один периметр, нельзя завести их несколько и косить в один день один, в другой — другой. А это актуально для больших или путанных газонов и участков, когда за 1-3 покоса не реально скосить территорию, можно продумать автоматическое переключение на базе периметров проволки и робот перед выездом на задание узнаёт у базы какой периметр сейчас активен и исходя из этого выбирает необходимую программу закрашивания.
У меня есть 3Д принтер, 30х30х30 рабочая площадь, так что многие вещи могу тупо напечатать на нём.
Прошу у товарищей из сообщества советов по железу, подводные камни которые вы видите и тд и тп.
Давайте проведём мозговой штурм, чтобы меньше тыкаться носом в последствии.
Источник
Ardumower: делаем автоматическую газонокосилку своими руками

Немецкий инженер Андреас Хаузер [Andreas Haeuser] предложил интересную и недорогую альтернативу электрическим автоматическим газонокосилкам, стоимость которых начинается от $1000. Всего за $12 в его магазине можно купить инструкцию и файлы, необходимые для самостоятельного изготовления подобного устройства, названного им Ardumower. Для этого вам понадобятся Arduino и 3D-принтер.
Устройство, по заверениям разработчика, сделано таким образом, чтобы собрать его мог даже неискушённый в инженерных делах человек. Использование Arduino Uno и Arduino motorboard упрощают электрическую схему. Для распечатки подойдёт принтер, рабочая область которого не меньше 180 x 180 x 60 мм.

Двигается автокосилка благодаря двум 12В-моторам, а третий используется для работы режущего диска. Источником энергии выступают аккумуляторы. Чтобы косилка распознавала границы участка, первоначально потребуется возвести специальную проволочную ограду.

Косилка обладает обратной связью и умеет объезжать препятствия. На одной зарядке типичного аккумулятора она способна обслуживать до 500 кв.м. территории. В случае необходимости косить большие площади, можно озаботиться установкой дополнительного аккумулятора или созданием дополнительного Ardumower’а.
Источник