- Автоматический дозатор мыла и антисептика своими руками.
- Что понадобиться для того чтобы сделать самодельный дозатор.
- Схема подключения самодельного автоматического дозатора мыла.
- Программа для управления автоматическим дозатором.
- Сборка самодельного дозатора.
- Обзор автоматического сенсорного дозатора для жидкого мыла.
- Автоматический санитайзер для рук своими руками
- Что понадобится
- Шаг первый. Подводим питание к макетной плате
- Шаг второй. Подключим управляемый светодиод
- Шаг третий. Подключаем датчик препятствий
- Шаг четвёртый. Начинаем программировать
- Шаг пятый. Подключаем сервопривод
Автоматический дозатор мыла и антисептика своими руками.

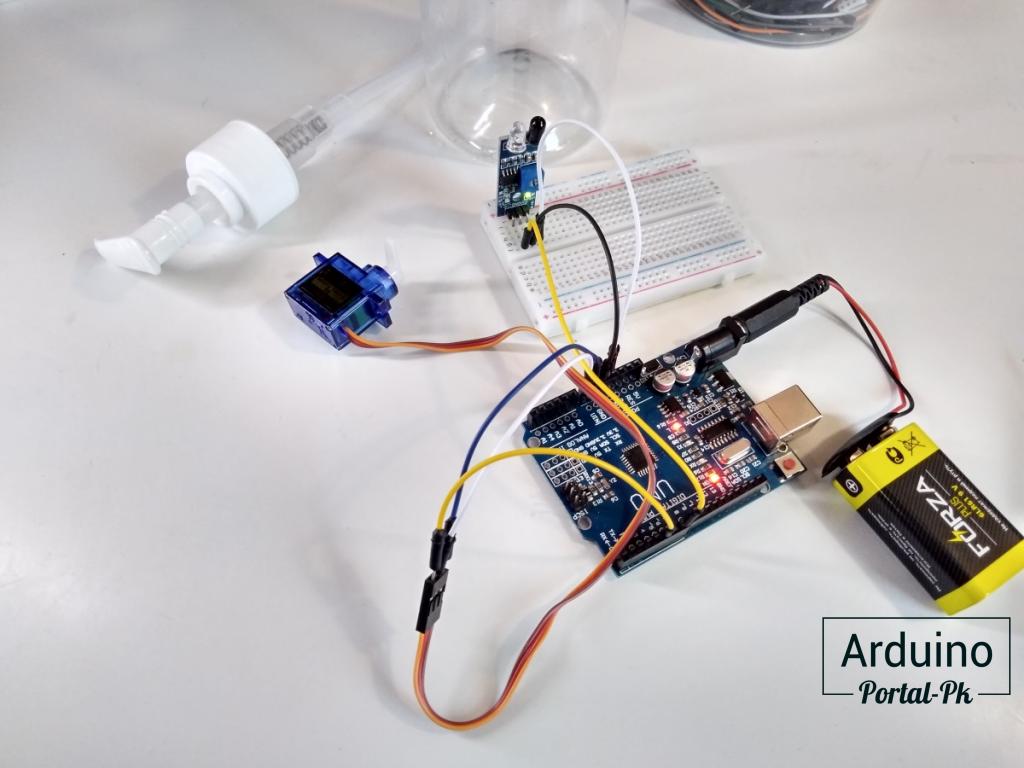
В школе робототехники, где я работаю преподавателем, попросили сделать автоматический дозатор мыла на Arduino. Начал я разрабатывать данный проект и тут закрыли всех на карантин. Проект автоматического сенсорного дозатора для жидкого мыла так и стоял недоделанным. Решил я исправить данную ситуацию и вот что получилось.

Дозатор работает от батарейки крона 9v, что обеспечивает автономность и безопасность работы, но есть и минусы. Но обо всем по порядку.
Что понадобиться для того чтобы сделать самодельный дозатор.
Использовать ультразвуковой датчик расстояния, который используют в большинстве случаем для реализации подобных проектов, я не стал. Для измерения расстояния решил использовать инфракрасный модуль препятствия. Его преимущества заключается в небольших размерах и простоте использование в Ардуино проектах.
Для того, чтобы собрать автоматический дозатор мыла понадобится:
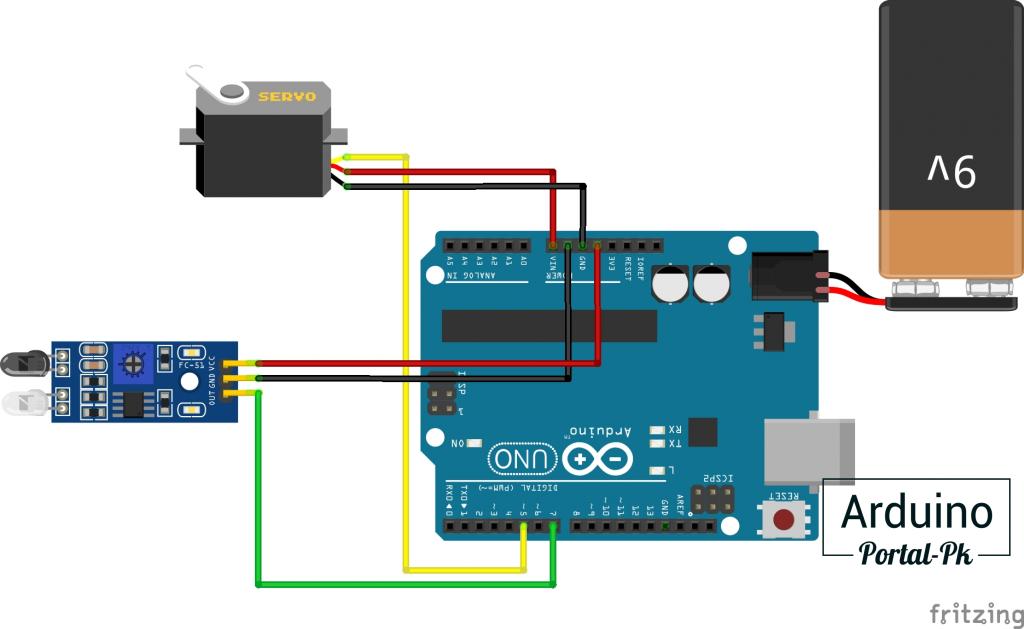
Схема подключения самодельного автоматического дозатора мыла.
Для программирования и отладки сенсорного дозатора мыла собираем все элементы на макетной плате по схеме.
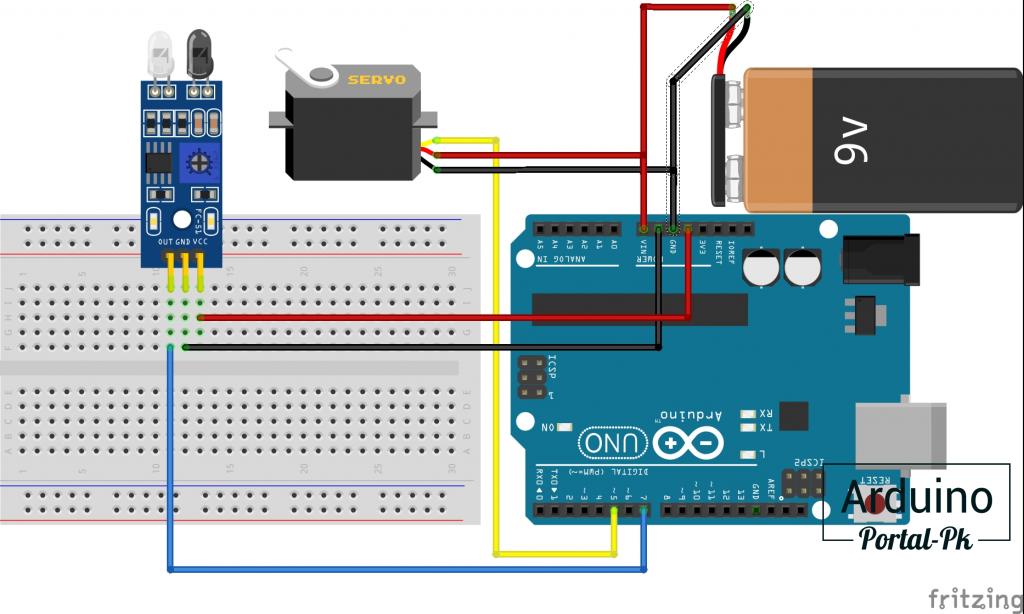
При сборке схемы для автономной работы от батарейки крона изменим схему подключения. Плюсовой контакт Servo подключим в пину vin, так как данный пин соединен напрямую с источником питания, в нашем случае это батарейка крона 9v. Соответственно питание на Servo будет 9 в.
Программа для управления автоматическим дозатором.
В связи с тем, что инфракрасный модуль препятствия устроен так, что при появлении препятствия на выходе датчика будет 5 в. При отсутствии препятствия соответственно 0. Поэтому код будет аналогичен работе изменения положения сервопривода при нажатии кнопки. Урок можно посмотреть тут: Подключает servo-привод к arduino. Сервопривод + кнопка
Поэтому подробно останавливаться на разборке кода не будем.
Сборка самодельного дозатора.
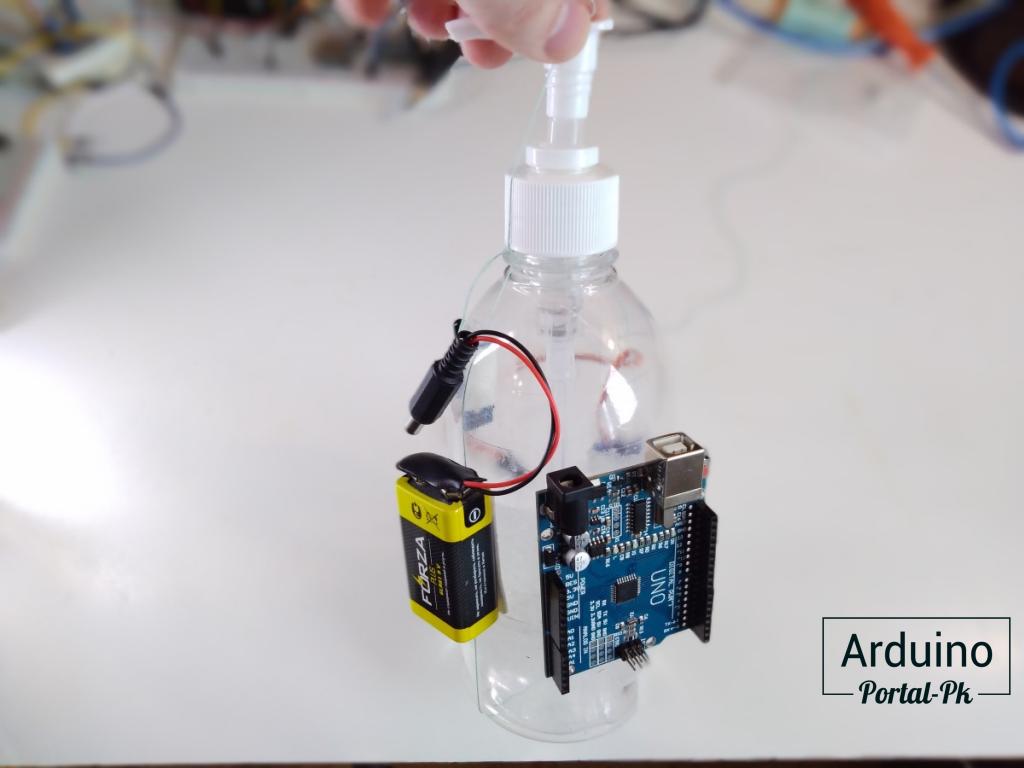
После проверки на работоспособность схемы и кода, можно приступить к сборке всех элементов на нашей бутылке с дозатором.
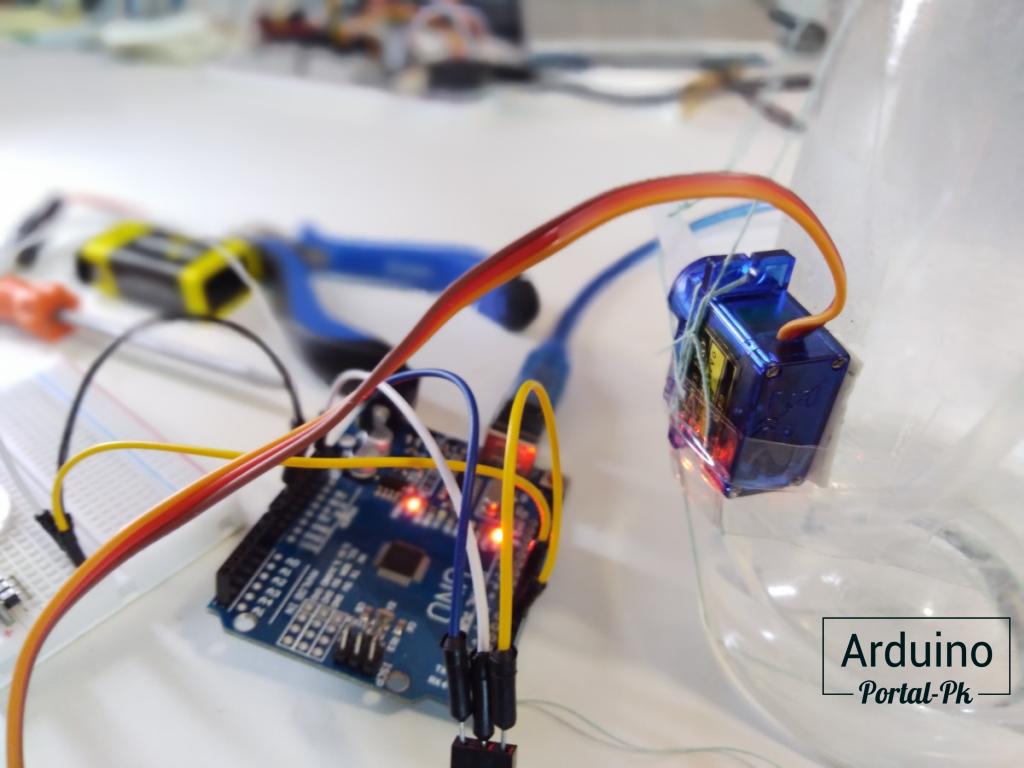
Сперва устанавливаем сервопривод, я приклеил его на двухсторонний скотч и закрепил ниткой. Но при этом жёсткости не хватало, поэтому я еще его прикрепил с помощью узкого прозрачного скотча, сделав несколько оборотов вокруг бутылки.
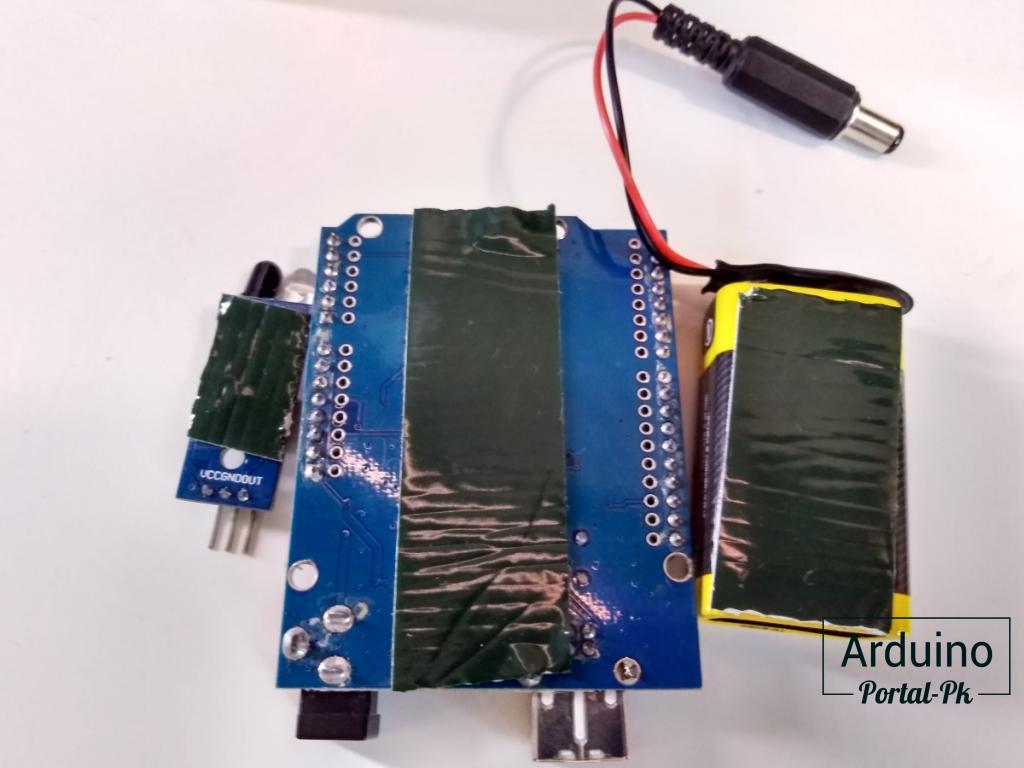
Затем приклеил на двухсторонний скотч остальные элементы: Ардуино, датчик и батарею крона.
С помощью соединительных проводов соединил все элементы как показано на схеме выше.

Закрепил под крышкой одну сторону нитки, перекинул через носик дозатора, а второй край прикрепил к рычажку сервопривода.
Обзор автоматического сенсорного дозатора для жидкого мыла.

Самодельный автоматический дозатор жидкого мыла на Arduino готов. Когда подносим руки к дозатору, то срабатывает сервопривод и на руки подаётся жидкое мыло. Все работает, причем автономно. Бутылку с мылом можно поставить в любое место. Или сделать бутылку с антисептиком и поставить в коридоре около входной двери, что позволит при возвращении с улицы ни чего не прикасаясь обработать руки. Достаточно удобная и необходимая самоделка в нынешней ситуации.
Кроме плюсов есть и минусы. В связи с тем, что сервопривод закреплен не жёстко, через определённое время работы он немного смещается и дозировка становится совсем маленькой. Сервопривод достаточно слабый это также сказывается на качестве работы дозатора.
Также нужно учесть, что скотч клеить на контакты датчика нежелательно, так как возможны ложные срабатывания при включении Ардуино. Что у меня и произошло.
Вывод можно сделать следующий.
Дозатор работает, и пользоваться можно, но желательно поставить более мощный сервопривод. А также рассмотреть реализацию с напечатанными на 3D принтере элементами, для более надежной фиксации электронных компонентов.
Если есть вопросы, проблемы, предложения и пожелания, пишите их в комментариях. Комментарий можно написать без регистрации на сайте.
Не забывайте подписываться на мой YouTube канал, вступать в группу Вконтакте, в группу на Facebook.
И всем пока-пока.
До встречи в новом проекте.
Понравилась статья? Поделитесь ею с друзьями:
Источник
Автоматический санитайзер для рук своими руками

Сегодня я расскажу, как собрать простой бесконтактный санитайзер: автоматизирую обычный дозатор для жидкого мыла. В этом мне поможет Arduino, инфракрасный датчик и миниатюрный сервопривод.
Что понадобится
— микроконтроллер Arduino Uno
— инфракрасный датчик препятствий E18-D80NK
— сервопривод FS90R
— пара индикаторных светодиодов
— два сопротивления на 220 Ом
— макетная плата
— соединительные провода «папа-папа»
Мозгом устройства станет любительский микроконтроллер Arduino Uno. У меня под рукой оказалась оригинальная плата, но вы можете использовать практически любые китайские клоны — проект простой, они точно справятся с модулями.

Собирать такой простой гаджет с помощью пайки слишком сложно и долго. Поэтому соберу на простой макетной плате. На таких платах обычно собирают прототипы устройств, но для моего санитайзера это вполне рабочий вариант. Отверстия на макетной плате соединены между собой. По длинным сторонам проходят шины питания, отверстия в центре платы соединены между собой рядами или строками. Это позволяет избавится от проводов и не возиться с паяльником.

Звучит сложно? Посмотрите пошаговую инструкцию, всё станет понятно.
Шаг первый. Подводим питание к макетной плате
Подведём электричество к макетной плате от Ардуино. Напряжение постоянного тока всего пять вольт, это абсолютно безопасно для детей и домашних животных. Соединим контакт 5V с плюсовой шиной на плате, а GND с минусовой.

Чтобы проверить, идёт ли ток, добавим в схему зелёный светодиод. Напрямую подключать светодиоды к питанию нельзя, они могут быстро перегореть. Поэтому добавим в цепь сопротивление, оно понизит напряжение до нужного уровня. Соединим длинную ногу светодиода с плюсовой шиной питания. Для этого вставьте сопротивление в соседнее со светодиодом отверстие, а другую ножку сопротивления — в шину питания. Теперь соедините короткую ногу с минусовой шиной коротким проводом.

Если всё сделали правильно — светодиод загорится. Если светодиод не горит, вероятней всего вы перепутали его полярность. Проверьте ещё раз: длинную ногу нужно подключать к плюсу, короткую — к минусу.
Шаг второй. Подключим управляемый светодиод
Зелёный светодиод будет гореть, пока плата подключена к сети — как лампочка без выключателя. Управлять им не получится. Добавим к устройству второй светодиод — красный — и научимся им управлять.

Подключим плюсовую ногу светодиода. Понадобится ещё один резистор и провод. Воткнём обе ноги резистора в отверстия на одной строке со светодиодом. Теперь добавим провод, который соединит резистор с контактом Ардуины. Воткните его в 13 разъём. Из коробки плата раз в секунду подаёт на него ток, поэтому мы сможем сразу проверить работоспособность устройства — не придётся ничего программировать. Подключите короткую ногу светодиода к минусовой шине ещё одним проводом.

Если всё сделали правильно — красный светодиод будет включаться и выключаться каждую секунду.
Если светодиод не мигает посмотрите на Ардуину. Рядом с 13 контактом на ней сделан маленький светодиод. Он загорается, когда на контакт идёт ток. Если светодиод на плате мигает, проверьте правильно ли вы собрали схему.
Шаг третий. Подключаем датчик препятствий
Добавим к устройству инфракрасный датчик препятствий. У датчика три контакта. Плюс и минус нужно подключить к шине питания на макетной плате. Третий провод — к контакту на Ардуине.

Датчик простой, он выдаёт сигнал о том, что появилось или исчезло препятствие, но не сообщает расстояние до него. Поэтому для его подключения подойдёт любой пронумерованный контакт Ардуино. Подключу его к контакту номер 2.

Проверить работу датчика легко — в торце, рядом с проводом, сделан маленький светодиод. Он загорается когда датчик видит препятствие. Чтобы отрегулировать расстояние на котором сработает датчик, покрутите регулировочный винт. Датчик видит объекты в диапазоне от 3 до 80 сантиметров.
Шаг четвёртый. Начинаем программировать
Сделаем так, чтобы красный светодиод загорался, когда перед датчиком появляется препятствие. Для этого напишем простую программу.
Платы Arduino программируются через специальный редактор кода, он называется Arduino IDE. Редактор бесплатный — скачайте его и установите на своём компьютере или ноутбуке. Затем подключите к компьютеру плату Arduino — воткните провод от неё в разъём USB, как флешку или жёсткий диск.

Запустите Arduino IDE. Перед вами откроется окно, похожее на Word или блокнот. Сюда мы будем вводить код программы. Arduino программируется на языке C++. О программировании мы ещё расскажем отдельно, а пока просто скопируйте приведённый ниже код.
// Задаём контакты, к которым подключены модули
const int buttonPin = 2; // Номер контакта датчика препятствий
const int ledPin = 13; // Номер контакта светодиода
int buttonState = 0; // Значение сигнала датчика сработал/отключился
void setup() <
// Переключаем контакт светодиода в режим передачи сигнала
pinMode(ledPin, OUTPUT);
// Переключаем контакт датчика в режим приёма сигнала
pinMode(buttonPin, INPUT);
>
void loop() <
// определяем, что передаёт датчик
buttonState = digitalRead(buttonPin);
// Если датчик видит препятствие, зажигаем светодиод, иначе — гасим.
if (buttonState == HIGH) <
digitalWrite(ledPin, HIGH); // Зажигаем светодиод
> else <
digitalWrite(ledPin, LOW); // Гасим светодиод
>
>
—>
Сохраните файл с кодом. Теперь нажмите кнопку “Прошить плату” и дождитесь сообщения об окончании процесса.
Теперь плата зажигает красный светодиод, когда видит препятствие перед датчиком приближения.

Если плата по-прежнему мигает красным, прошивка не удалась. Проверьте в настройках Arduino IDE тип платы и порт, к которому она подключена. У вас должны быть значения, как на этих двух рисунках.


Если проблема осталась, рекомендую посмотреть инструкцию о настройке Arduino IDE на wiki.amperka.ru
Шаг пятый. Подключаем сервопривод
Теперь подключим сервопривод. Именно для работы с ним понадобился микроконтроллер. Сервопривод — это не обычный мотор. Кроме питания, он должен получить команду, которая задаст угол поворота. Сервопривод повернёт рычаг в нужное положение и станет удерживать угол, пока не получит следующую команду.

Подключим плюс и минус сервопривода к шинам питания макетной платы. Сигнальный контакт подключим напрямую к 9 контакту Arduino.

Всё готово, остаётся прошить плату новой прошивкой. Скопируйте код и прошейте плату так, как делали это на предыдущем шаге.
// Зададим контакты, к которым подключены модули
const int buttonPin = 2; // Номер контакта датчика препятствий
const int ledPin = 13; // Номер контакта светодиода
#include // Добавим библиотеку, которая обеспечивает работу с сервоприводом
Servo myservo; // и создадим объект для управления сервоприводом
int buttonState = 0; // Значение сигнала датчика сработал/отключился
void setup() <
pinMode(ledPin, OUTPUT); // Переключаем контакт светодиода в режим передачи сигнала
pinMode(buttonPin, INPUT); // Переключаем контакт датчика в режим приёма сигнала
myservo.attach(9); // Задаём что серва подключена к 9 контакту
>
void loop() <
// определяем, что передаёт датчик
buttonState = digitalRead(buttonPin);
// Если датчик видит препятствие, зажигаем светодиод и поворачиваем серву, иначе — гасим.
if (buttonState == LOW) <
// turn LED on:
digitalWrite(ledPin, HIGH); // Зажигаем сигнальный светодиод
myservo.write(180); // Поворачиваем серву на угол 180 градусов
delay(500); // ждём 500 милисекунд, то есть полсекунды
myservo.write(0); // Возвращаем серву на 0 градусов
delay(500); // ждём ещё полсекунды
> else <
digitalWrite(ledPin, LOW); // Гасим светодиод
>
>
—>
Теперь можете упаковать всю электронику какой-нибудь корпус или коробку. Я использовал подарочную коробку от мультитула, просто потому что она подошла по размеру. Прикрепить серву к дозатору можно с помощью двухстороннего скотча или деталями детского конструктора. Что получилось у меня — смотрите в нашем ролике.
Пишите в комментариях, какие электронные проекты вам интересны, что осталось непонятно и о чём рассказать в следующих статьях.
Источник