- Робот на Ардуино и машинка на Bluetooth своими руками
- Робот на ардуино своими руками
- Контроллер Ардуино
- Конструкция, шасси и двигатели робота на Ардуино
- Драйвер двигателей
- Красивый корпус
- Питание робота
- Где купить платформу и запчасти
- Трансформер ростом в 7 метров из старого автомобиля
- Робот на основе автомобиля Монстр-1
Робот на Ардуино и машинка на Bluetooth своими руками
Робот – машинка на Ардуино становятся одним из самым популярных инженерных проектов в школьной робототехнике. Именно с таких устройств, автономных или управляемых со смартфона и bluetooth, начинается путь в робототехнику “после Lego”. К счастью, сегодня можно без труда купить все необходимые компоненты и достаточно быстро создать своего первого робота для езды по линии или объезда препятствий. В этой статье вы найдете подробную видео инструкцию как сделать продвинутый автомобиль Arduino Car своими руками, с питанием, датчиками линии, расстояния и управлении через bluetooth.
Робот на ардуино своими руками
В отличие от других проектов, создание робота – автомобиля (Arduino Car) требует понимания и навыков работы сразу с несколькими важными компонентами, поэтому не стоит приступать к созданию машинок без получения базовых навыков работы с платформой Arduino. В любом случае, вам нужно будет но только подключить готовые модули, но и собрать конструкцию, шасси с двигателями, обеспечить правильное питание и управление. Все это потребует определенного терпения.
 Робот машина на Ардуино
Робот машина на Ардуино
Вот список ключевых компонентов, которые обязательно встретятся в проекте.
Контроллер Ардуино
Куда уж без него, если мы говорим о проектах на этой платформе. Как правило, роботы машины делают на базе плат Arduino Uno и Nano. Mega будут слишком большие, Pro Mini сложнее подключать к компьютеру и соединять с остальными компонентами, а Leonardo требуют дополнительных навыков в программировании, они дороже и их основное преимущество (тесная интеграция с компьютером в качестве периферийного устройства) в данном случае не слишком востребована.
Есть еще вариант использования плат ESP8266 или ESP32, тогда в проекте появляется возможность управления машиной через WiFi. Но и сами платы и их программирование требует определенных навыков, в этой статье мы будем говорить преимущественно об Uno или Nano.
Конструкция, шасси и двигатели робота на Ардуино
Для того, чтобы что-то поехало или стало перемещаться, надо снабдить “это” колесами, гусеницами или манипуляторами-ногами. Вот тут выбор совершенно не ограничен, можно использовать совершенно любые комбинации и сочетания платформ. Как правило, в качестве начального варианта берутся уже готовые наборы платформ с Алиэкспресс.
 Двигатель, шасси и колеса машинки на ардуино
Двигатель, шасси и колеса машинки на ардуино
Если работать со стандартными наборами вам не интересно, можно создать платформу своими руками. Например, разобрать игрушечные радиоуправляемые машинки или любые двигатели на 5-12 вольт, с редукторами или без. Колеса можно создать и самим, что тоже является интересной задачей.
Драйвер двигателей
Ардуино – достаточно ранимое устройство, не терпящее больших нагрузок по току. Соединяя его с “брутальными” мощными двигателями, не избежать беды. Поэтому для нормальной совместной работы нам нужно будет включить в схему робота компонент, отвечающий за управление двигателями – подающий и отключающий ток на их обмотки. Речь идет о микросхеме или готовом модуле, которые называют драйвером двигателя. На нашем сайте есть статьи, посвященные драйверам, построенным на схеме H-моста. Если вы покупаете готовые шасси, то обязательно предусмотрите возможность размещения на них подходящего драйвера.
Красивый корпус
Как правило, вся конструкция автомобиля строится вокруг его шасси. Если посмотреть примеры готовых проектов, то они часто выглядят как “провода на колесиках” – внешний вид их изобилует пучками соединительных проводов, ведущих от восседающего на троне контроллера Ардуино к драйверам, моторам и датчикам. Между тем, красивый и функциональный корпус не только вызывает правильные эстетические чувства и помогает выделить вашу модель от остальных. Хороший корпус может превратить игрушку в реальное устройство, помогает привить навыки конструирования и промышленного дизайна, что важно для инженеров любого возраста.
Питание робота
Обеспечение правильной схемы питания – это то, что очень часто оказывается на последнем месте в списке приоритетов начинающих ардуинщиков. Между тем, именно ошибки в схеме электропитания становятся основными причинами проблем, возникающих в процессе работы умных устройств на Ардуино. Создавая ардуино-машинку нужно предусмотреть питание контроллера, двигателей, драйвера и датчиков. У всех них есть свои ограничения и особенности работы, требуется создать оптимальное по весу и сложности решение, позволяющее учесть все эти ограничения.
 Питание робота на Ардуино
Питание робота на Ардуино
Создавая по-настоящему автономное устройство робота, нужно побеспокоиться и о времени его работы, и о возможности быстрой подзарядки или смены батареек. Как правило, выбираются решения из следующих вариантов:
- Обычные батарейки AA. Тут нужно понимать, что платы Arduino Uno, Nano и большинство двигателей, используемых в Ардуино-робототехнике, требуют напряжения в диапазоне 6-9 вольт. Поэтому придется собрать вместе последовательно не менее 4 батареек на 1,5 В, причем сами батарейки должны быть хорошего качества и обеспечивать работу с достаточно большим током. Например, большинство солевых батареек этим критериям не удовлетворяют. Батарейки AAA при создании ардуино-машинок практически не используются из-за своей пониженной емкости (хотя могут использоваться в миниатюрных моделях, где размер имеет первостепенное значение).
- Аккумулятор AA. Здесь возникает еще большее ограничение по напряжению и току. Большинство аккумуляторов выдают напряжение 1,2 вольт, поэтому их требуется больше для “собирания” нужных нам 6-9 вольт. Несомненным плюсом является возможность перезарядки.
- Литиевые аккумуляторы 18650. Это уже “серьезная артиллерия”, позволяющая получить большое время автономной работы, возможность подзарядки и приемлемые характеристики по току и напряжению. Рабочее напряжение для таких элементов питания – 3,7 В, что позволяет собирать готовую схему питания всего из двух элементов.
- Другие источники питания. Сюда можно включить как более мощные и габаритные никель-металлгидридные, кадмиевые аккумуляторы, так и многочисленные литий-ионные “плоские” варианты, используемые в дронах, смартфонах или другой портативной цифровой технике.
Каким бы ни был источник питания, нужно обеспечить его надежное крепление, удобное расположение, защиту от воздействия недружелюбной окружающей среды. Если вы подключаете к одному источнику и контролер, и двигатели, и датчики, то нужно позаботиться о правильной схеме, включающей, например, надежную связь “по земле” всех устройств.
Где купить платформу и запчасти
Все, о чем говорится в этой статье, можно без проблем купить на всем известном сайте. К сожалению, подавляющее большинство предложений основываются на стандартной платформе 4WD автомобиля с двумя несущими планками, не очень надежными двигателями и колесами, любящими ездить в “развалочку”. Но эти варианты относительно не дороги и вполне подойдут для начала работы.
Источник
Трансформер ростом в 7 метров из старого автомобиля
| Источник: 3dnews |
Один из жителей Америки сконструировал семиметрового робота, использовав для этого в лучших традициях роботизированных героев блокбастера Майкла Бэя старый автомобиль. Автором проекта гаражного трансформера стал американский мастер Джорж Эдгрен (George Edgren), который до этого на протяжении многих лет занимался художественной стрижкой газонов. Для реализации имеющегося творческого потенциала Эдгрен решился поработать и с металлической конструкцией, которая стала его самым масштабным проектом за всю жизнь.

На создание огромного трансформера он потратил примерно месяц. В качестве базы для воплощения в жизнь висконсинского Оптимуса Прайма было принято решение использовать автомобиль модели Oldsmobile Alero. Самое интересное, что автор проекта вовсе не является ярым фанатом вселенной трансформеров. История про противостояние автоботов и десептиконов ему, конечно, понравилась. Но сам Джорж Эдгрен не стал бы специально конструировать робота под впечатлением от просмотра фильма. Подтолкнуть к реализации полномасштабной модели робота сумел его товарищ, который предложил ему идею собственными силами соорудить нечто похожее на героя серии.
![]()
В итоге талантливый слесарь разобрал транспортное средство и грамотно продумал конструкцию будущего трансформера таким образом, чтобы максимально эффективно использовать все имеющиеся автомобильные детали. Шины он установил вместо плечевого сустава робота, роль грудной клетки была отведена капоту от Oldsmobile, а двери послужили нижней частью корпуса и элементами ступней устрашающего механизма.
![]()
Внутренние детали авто послужили преимущественно в качестве каркаса-скелета автобота.
![]()
Правда, сам трансформер не очень точно имитирует модель одного из персонажей культовой саги, так как сам создатель не слишком переживал по поводу точности деталировки. Господину Эдгрену достаточно было общего понимания поставленной его другом задачи и того сложившегося образа трансформера, которой отложился у него голове после знакомства с кинолентой.
Источник
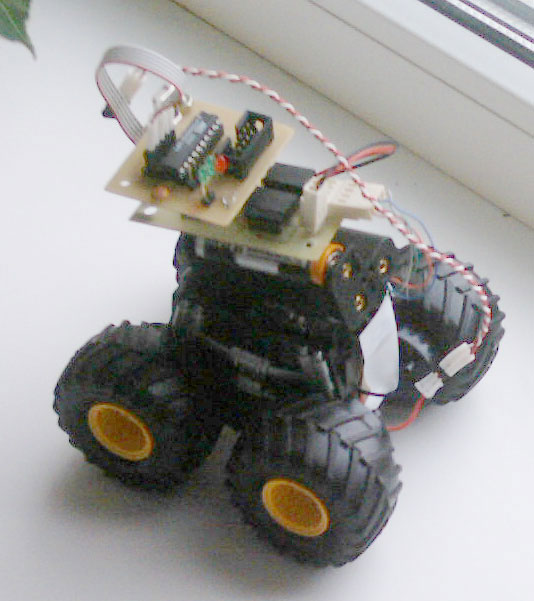
Робот на основе автомобиля Монстр-1
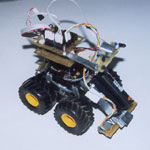
| 12.07.2010, 19:54 31.10.2004г. Этот робот появился впервые в проекте мини-сумо как спарринг-партнер для робота-сумоиста. Однако для отладки различных схем необходим был мобильный робот. За основу был взят автомобиль Монстр-1 который имеет следующие характеристики: — 2 двигателя 2-4В — редуктор с приводом на все колеса. колеса соединены парами- слева пара колес, и справа пара, которые соединены редуктором с двигателем и вращаются синхронно. — широкие резиновые колеса, полые внутри с протектором. — корпус из пластмассы, которых легко сверлится и клеится. Вот одна из первых фотографий робота:
Так как для нормальной работы схем необходимо 2 типа питания: 5В для схем управления и датчиков и 2-4 В для двигателей, было принято решение установить 2 источника питания: один состоит из 4-х аккумуляторов 1.2В 250мА/ч (сборка), а для питания двигателей подключается либо 2 либо 3 аккумулятора по 1.2В (тип АА). Питание двигателей осуществлялось при помощи аккумуляторов различных типов и емкостей, от NiCd 600мА/ч до 2100 NiMh. Конечно же, метал-гидридные аккумуляторы показали себя с лучшей стороны. Сборка 4-х аккумуляторов находится между колес робота, что достаточно удобно. Далее приводятся некоторые схемы: Плата управления коллекторными двигателями на основе реле:
резисторы перед базой транзистора я брал 1к. Вы можете подбирать сами. Транзистор можно взять любой маломощный n-p-n-типа. КТ3102 или КТ315, например, тоже подойдут.
Транзистор аналогично верхней схеме, ИК- светодиоды- TSAL5100. Они диаметром 5 мм, мощность использована не более 20%, поэтому можно взять менее мощные светодиоды. Плата управления на основе AT90S2313-10PI:
Конденсатор С1 на самом деле кварцевый резонатор, но по размеру подходил именно этот. Резистор R2- это SMD-светодиод на плате. Все резисторы и конденсаторы, кроме электролитического, в SMD-исполнении. Разъем SL2 предназначен для подключения платы управления двигателями. Остальные разъемы- для подключения различных датчиков: ИК-бампера, датчика вращения колес, датчика пола (для сумо-робота). Датчик вращения колес (одометрии) очень простой, схему можете посмотреть здесь:
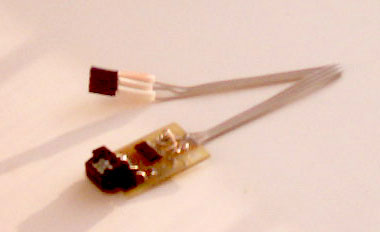
Взят, правда, только один канал, а на схеме 4. Но ведь и датчиков может понадобиться 4. Микросхема- компаратор LM339 (139, 239) или аналог. Приемник и передатчик взят готовый- датчик на отражение. Подстроечным SMD-потенциометром мы выставляем такое напряжение, при котором датчик срабатывает наиболее уверенно. Он получился не очень маленький, но на роботе установился легко.
датчик вращения колес. Черный- это ИК-датчик, работающий на отражение. Видна микросхема и подстроечный резистор. Обещаю в скором времени обновить все фотографии в хорошем качестве. 05.11.2004 Фотографии в хорошем качестве с комментариями. program1.txt Вариант программы для этого робота. Очень сырой вариант. В последний раз тестировал его на плате с частотой 8МГц, поэтому стоят константы для этой частоты. 17.12.2004г. Новый вариант робота на основе автомобиля Монстр-1 Первый робот на базе Монстр-1 может быть неплохим сумоистом, также при использовании более информативного датчика края может следовать по линии. Однако хотелось создать на основе автомобильчика более «продвинутую» платформу, к которой подключалась бы только плата управления (мозг) робота, аккумуляторы и датчики. Вначале я убрал все лишнее, подпаял к двигателям конденсаторы 0.1 мкФ, ну и конечно проверил сами двигатели на работоспособность. Все работало нормально. Далее, взяв кусок узкой монтажной платы, я впаял в нее микросхему L293D, подпаял все необходимые проводки и разместил плату между колесами. Самым неприятным моментом в тестировании роботов являются аккумуляторы. Во-первых, их нужно как-то закреплять, иначе они сваливаются на пол в самый неожиданный момент, что не очень приятно. Поэтому, используя ножницы по металлу, бумагу, карандаш, линейку, я сделал сначала чертеж робота на бумаге, вырезал из бумаги то, что я задумал, примерил на платформе, а потом, просто приложив к металлу (какая-то часть бывшего принтера или сидирома), вырезал деталь. Осталось просверлить отверстия и согнуть в нужных местах. Найдя несколько маленьких шурупчиков и засверлив отверстия в пластмассе (диаметр в 2 раза меньше, чем у шурупов), я присоединил крепление для аккумуляторов. Можно согнуть боковые ламели таким образом, что блок аккумуляторов будет входить плотно и не будет выпадать, даже если перевернуть робота «вверх ногами». Все это вы можете наблюдать на фотографиях, которые для удобства даны разного размера. Источник |
 667х664 (79кб), 320х320 (24кб)
667х664 (79кб), 320х320 (24кб) 640х452(54кб) , 320х226 (18кб)
640х452(54кб) , 320х226 (18кб) 640х644(72кб), 320х322(23кб)
640х644(72кб), 320х322(23кб)