- Практические советы и хитрости при работе с дронами DJI и их автопилотными системами
- Итак, начнем
- Предполетная подготовка
- Первый полет
- Пару слов о видеолинке
- Посадка
- После посадки
- Собираем самодельный квадрокоптер
- HobbyKing KK
- MultiWii Lite V1.0
- MultiWii 328P
- Регуляторы оборотов для квадрокоптеров и мультироторных летательных аппаратов
- Turnigy Multistar 30 A
- Turnigy Multistar 20 A
- Двигатели для самодельного квадрокоптера
- Turnigy Aerodrive SK3 2822-1275
- NTM Prop Drive Series 28-30S
- Turnigy Multistar 2216-800Kv
- Похожие статьи:
Практические советы и хитрости при работе с дронами DJI и их автопилотными системами
Приветствую всех хабровчан, и тех, кому интересна тема квадрокоптеров в частности! Так уж сложилось, что последний год я активно пользуюсь продукцией DJI, и прочитав несколько статей понял, что информации, помимо изложенной в мануале, не так уж и много. Особенно грустно читать статьи, в которых говорится как кто-то сломал\потерял свой квадрик, допустив элементарную ошибку. В связи с этим я решил написать небольшой материал, в котором опишу собственные наблюдения и постараюсь дать полезные советы начинающим DJIводам.
Дисклаймер: некоторые моменты, описанные в этом материале, могут многим показаться примитивными, однако, прочитав несколько статей на хабре о поюзе DJI’ных устройств, я сделал вывод, что ликбез не помешает. Все выводы сделаны лично мной и основаны на личном опыте использования дронов от DJI. Советы и замечания будут выделяться по ходу повествования, и для наглядности выделяться подчеркиванием. Интересно? Тогда прошу под кат.
UPD: Рекомендую почитать комментарии, участники добавили не мало полезной информации!
Итак, начнем
А начнем мы, пожалуй, с одного из самых распространенных на сегодняшний день квадрокоптеров от DJI — Phantom Vision 2.
Всего «Фантомов», из тех, что я видел в продаже, существует три модификации:
FC40 — это первая версия «Фантома», нам она мало интересна, т.к. устарела морально, имеет маленькую батарейку, камеру попроще (в сравнении с Vision 2 и 2+), слабенький видеолинк и прочие мелочи, заметно улучшенные в версии Vision 2. Vision 2+ это по сути тот же самый Vision 2, но с камерой, которая на стандартном подвесе может снимать вертикально вниз и увеличенной (по заверениям самих DJI) дальностью приема видеосигнала (Поскольку лично не использовал 2+ — утверждать этого не могу).
Поскольку Vision 2+ еще не сильно распространен, а FC40 уже устарел — наш выбор падает на Vision 2. Производитель предлагает это чудо инженерной мысли за скромные 999$ или за 1060$ с дополнительным аккумулятором.
Если есть возможность — лучше не жаться, и купить второй аккумулятор сразу. Рано или поздно Вы всеравно созреете до его покупки, а купив его в комплекте с квадриком получается неплохая экономия.
На анбоксинге останавливаться не будем, этого добра валом в гугле и на ютубе, единственное, что меня удивило — отсутствие какой-либо инструкции, кроме небольшого буклета, суть которого сводится к «Достать из коробки, включить, лететь. Руки в пропеллеры не сувать». Зайдя на сайт DJI я обнаружил довольно плотный мануал аж в 28 страниц (Язык, увы, английский, но мне это роли не играет).
Если это Ваш первый дрон, и если у Вас нету практического опыта — распечатайте, положите в коробку. Пригодится. На первых порах его мне порой не хватало «в поле».
Чуть забегая вперед, скажу, что на Vision 2 установлен автопилот Naza-M. Продается он также отдельно, например если Вы решили собрать свой собственный мультиротор, но к написанию собственных «мозгов» еще не готовы. К слову, Naza-M не ограничивается квадрокоптерами, а также поддерживает и другие компоновки (трикоптеры, гексакоптеры и даже октокоптеры). Но это уже совсем другая история, и в этой статье мы на этом останавливаться не будем.
Предполетная подготовка
Наконец коробка с квадриком у нас в руках, и, разумеется, нам не терпется отправить китайское чудо техники в небо.
Первое, что нужно сделать перед первым полетом — это справиться с эмоциями. Большинство падений и «улетов» происходит именно по из-за спешки\волнения.
Распаковав аппарат, первым делом необходимо зарядить все аккумуляторы. Скорее всего, они придут уже с некоторым зарядом (основная батарея Li-Po), но я все же советую зарядиться до 100%. Тут уж китайцы продумали ошибки юзера. Аккумулятор «умный» заряжается сам до нужного уровня, после чего заряд прекращается, есть датчик температуры, который в случае чего зарядку остановит. Пропеллеры правого вращения невозможно накрутить на двигатели левого, и так далее. На этом этапе надо сильно постараться чтобы что-то сломать. Усилитель сигнала (так называемый range extender) заряжается от USB, при 100% заряде светодиод будет гореть зеленым цветом. И самое главное:
Не скупитесь на батарейки для пульта. Купите нормальные Duracel’ы. Основной принцип дроноводства — скупой платит трижды!
А пока батареи заряжаются можно скачать софтину для настройки квадрика с официального сайта — dji.com.
Зачем же нам какая-то софтина, если аппарат позиционируется как RTF — Ready to Fly (готов к полету)? Все очень просто, в случае какой-либо внештатной ситуации, автопилот переходит в режим Failsafe, чтобы сохранить жизнь Вашему фантику. Однако, вариаций Failsafe’ов аж три:
- — Квадрик возвращается на место взлета
- — Квадрик набирает заданную высоту (по дефолту стоит 20 метров) и возвращается на место взлета
- — Квадрик плавно садится
Сразу замечу — «плавно садится» может отличаться от Вашего понимая «плавно». Особенно если дело доходит до экстренного разряда батареи, квадрик, слегка планируя, камнем пойдет к земле.
Посмотрите какой режим выставлен у Вас, и какое положение тумблера S2 переводит фантик в Failsafe. Запомните это.
Если у Вас есть телефон или планшет на андроиде или iOS — скачайте софтину DJI Vision. Запустите ее дома заранее, первый раз она просит регистрацию, правда никакого подтверждения на почту не приходит, что позволяет сделать соответствующий вывод. Зачем она нам — поговорим в следующем разделе.
Первый полет
И так, если батареи заряжены, а оператор не хочет есть, пить, спать и в туалет — можно готовиться к первому вылету!
Прибыв на место вылета первым делом откалибруем компас. Хоть китайцы об этом нигде не пишут, лично я рекомендую делать калибровку компаса перед каждым полетом, и именно на том месте, откуда Вы собираетесь взлетать. Ни в коем случае не рекомендую взлетать с железобетонных конструкций и вблизи крупных металлических объектов. Компас сбивается, после чего поведение квадрика в воздухе непредсказуемо.
Включаем комплекс в следующем порядке:
- Включаем пульт
- Включаем range extender
- Включаем сам квадрик
Теперь надо дать «Фантику» минуту-полторы, чтобы он поймал достаточно спутников и инициализировал Wi-Fi.
Я не советую совершать полеты, если количество спутников, пойманных перед взлетом, меньше шести.
Если спутники нашлись, «зад» квадрика горит зеленым, можно подключиться по Wi-Fi к открытой точке доступа range extender’a.
Помимо видеопотока в реальном времени, программа показывает кучу полезной информации, такой как: уровень заряда батареи, количество пойманных спутников, дистанция до квадрика (правда, увы, в футах), высота квадрика (тут тоже увы, она весьма примерная).
Если у Вас нету телефона\планшета на андроиде или iOS (мало ли) — не скупитесь, купите самый простой планшет на алиэкспрессе. Без информации о заряде батареи и видеопотока я с трудом представляю, как можно нормально летать.
Заводим двигатели, сведя стики управления друг к другу по диагонали вниз, и смотрим, все ли пропеллеры нормально вращаются, нет ли посторонних звуков.
Если замечаний нет — взлетаем. Сам процесс пилотирования описывать не вижу смысла, все интуитивно понятно, и, благодаря довольно хорошей системе стабилизации, просто. Единственное, что стоит отметить — не стоит слишком быстро снижаться.
Во время полета нужно всегда следить за уровнем заряда батареи. Первое предупреждение поступает при заряде батареи в 30%. При заряде в 15% квадрик начнет сажаться сам, причем, как говорилось ранее — «плавно» — это почти камнем вниз. Лично я стараюсь никогда не доводить заряд до критической отметки, и на 32-31% совершаю посадку.
Пару слов о видеолинке
DJI заверяют, что телеметрия стабильна на расстоянии до 300 метров. Лично у меня после 200 уже начинались «подвисания».
Чтобы эти самые «подвисания» минимизировать, стоит выставить в настройках DJI Vision минимальное качество превью. Я использую мобильник на android, даже при минимальном качестве превью картинка различима, и уж поверьте, лучше картинка чуть хуже, чем «подвисание», когда квадрик уже не видно визуально. Тем более, что пишет он в 1080р 30FPS независимо от качества превью.
Посадка
Посадка дело не хитрое, но и тут есть нюанс. У меня в инструкции сказано, что для старта и остановки двигателей используется одинаковое сочетание стиков. Это не совсем так. Дело в том, что если сесть на землю, а потом оба стика свести друг к другу вниз по диагонали (а именно так указано в мануале), квадрик впилится в землю и будет рубить ее пропеллерами.
Для плавной посадки, после соприкосновения с землей, надо левый стик опустить вертикально вниз, при этом не трогая правый, и подержать в таком положении несколько секунд. Двигатели плавно заглохнут.
После посадки
Часто случается, что после посадки, глянув по сторонам, вспоминаешь что вот «там» не успел или забыл снять, и интуитивно начинаешь взлет.
Это может привести к роковой ошибке, поскольку после посадки необходимо полностью выключить квадрик и всю аппаратуру, и перед очередным взлетом все включать по новой. В противном случае может произойти отказ управления, или Фантик полетит сам, не реагируя на управление.
Это прикол автопилота, не знаю, починили ли это в последних прошивках, но проверять не хочется.
Вот такой получился скромный опус, надеюсь кому-то пригодится, все же я считаю, что лучше ходить по чужим граблям.
PS: Глаз немного «замылился» после набора текста, пропущенные запятые и опечатки, которые наверняка есть, устраню.
Источник
Собираем самодельный квадрокоптер
Сделать самодельный квадрокоптер своими руками не сложно. Это гораздо проще, чем, к примеру, сделать самодельную авиамодель или радиоуправляемый вертолет.
Основа самодельного квадрокоптера — это рама. Ее можно купить готовую или сделать своими руками.
Самый простой вариант — купить готовую раму.
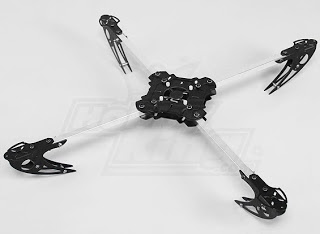
Рама Hobbyking X525 V3
Габариты: 600 мм
Материалы:
Ноги и центр. часть: текстолит
Лучи: алюминий
Цена: 550 рублей
Преимущество готовой рамы над самодельными в том, что все уже подготовлено для установки электроники и не надо искать материалы для изготовления.
Впрочем, раму для самодельного квадрокоптера можно сделать своими руками из практически любых материалов.

Вот, к примеру, квадрик изготовленный из линеек и пеноплекса (пенопластовый утеплитель).

А этот самодельный квадрокоптер сделан из пластиковых труб для водопровода.
Причем, такие самодельные квадрокоптеры летают ничуть не хуже заводских!

Если вы хотите сделать красивый и оригинальный квадрокоптер — то смотрите эту статью. В ней вы найдете чертежи квадрокптера как на фотографии выше и подборку электроники для него.
Но рама в четырех моторных агрегатах — не главное! Главное в них это мозги — плата управления с гироскопами, магнитометром и бародатчиком.
Давайте посмотрим, какую плату можно поставить на квадрокоптер сделанный своими руками.
%5B1%5D.jpg)
HobbyKing KK
- Купить плату квадрокоптера можно тут .
MultiWii Lite V1.0
Достоинства MultiWii Lite V1.0 — небольшие размеры, всего 40х40 мм и вес 9 грамм. В комплекте идет программатор для подключения к USB порту компьютера.
Эта плата управления квадрокоптером идеально подходит для изготовления небольших квадрокоптеров своими руками.
%5B1%5D.jpg)
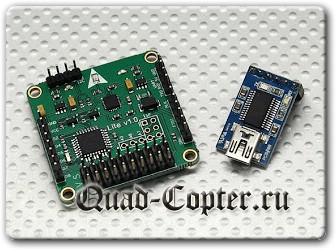
MultiWii 328P
ITG3205 Трехосевой гироскоп
BMA180 Акселерометр
BMP085 Барометр
HMC5883L Магнетометр
Цена: 1050 рублей
- Купить плату квадрокоптера можно тут .
MultiWii 328P — это наиболее оптимальная по отношению цена/качество плата управления.
Программатор вшит в плату, акселерометр позволяет компенсировать дрейфы гироскопов, бародатчик — автономно висеть на заданной высоте, а магитометр (фактически компас) включать режим управления, когда коптер может лететь по прямой вращаясь вокруг своей оси.
Такое сочетание датчиков позволяет не только полностью автономно контролировать квадрокоптер, но и управлять гироподвесом камеры держа ее параллельно горизонту при любых эволюциях самодельного квадрокоптера.
Регуляторы оборотов для квадрокоптеров и мультироторных летательных аппаратов
Однако, кроме платы управления не малую роль играют регуляторы оборотов электродвигателей.
Рекомендуется покупать специальные регуляторы для квадрокоптеров — Turnigy MultiStar, их не надо дополнительно перепрошивать.
Для самодельного квадрокоптера размерами 450-600 мм подойдет следующие регуляторы:
%5B1%5D.jpg)
Turnigy Multistar 30 A
Цена: 450 рублей
Купить регулятор можно тут .
Turnigy Multistar 20 A
Цена: 360 рублей
Купить регулятор можно тут .
Для 450-500 мм квадрокоптера берем 20 амперные регуляторы, а для 500-600 на 30А.
Впрочем, если поставить регулятор на 30А вместо 20ти амперного, то он просто будет меньше греться. Токопотребление задают моторы.
Двигатели для самодельного квадрокоптера

Turnigy Aerodrive SK3 2822-1275
Цена: 570 рублей
Купить мотор для квадрокоптера можно тут .
Под регулятор на 20 А.
%5B1%5D.jpg)
NTM Prop Drive Series 28-30S
Цена: 580 рублей
Купить мотор для квадрокоптера можно тут .
Под регулятор на 30 А.

Turnigy Multistar 2216-800Kv
Цена: 990 рублей
Купить мотор для квадрокоптера можно тут .
Под регулятор на 30 А.
Похожие статьи:
Фактически можно ставить любой полетный контроллер.
На сегодняшний день наиболее хорошо отзываются о Naza.
Для автовозврата квадрокоптера при потере связи нужна плата с поддержкой модуля GPS и сам модуль.
Если не отлетать дальше 100 метров и использовать только режим «ручного управления» — то подойдет любой.
Если предполагается «удержание точки висения в автоматическом режиме» то посоветую Naza Lite с GPS или Naza V2 с GPS.
Multiwii и Megapirate — контроллеры хорошие, к ним можно подключать GPS, но в настройках надо разбираться и поднастраивать под свой квадрик. Не слишком сложно, но пару дней займет.
Та же Наза фактически «летает из коробки», за что ее и любят, не смотря на более высокую цену.
Добрый день!
КвадроЛетчик, хочу сам собрать квадрокоптер, но есть жесткие требования к нему:
Должен получиться достаточно мощный квадрокоптер, который не сносит ветер, с дальностью управления около 1 км, с GPS и можно будет использовать камеру с высоким качеством съемки.
Готовые стоят космически дорого. Хочу сам собрать из комплектующих.
Вы можете мне посоветовать, как мне нужны запчасти: рама, моторчики, «мозги», аккумулятор и т.д.
Заранее спасибо!
el_moby@mail.ru
Там коллекторные двигатели (2 провода), их хватает примерно на 100 полетов. Потом менять. Впрочем, часто и после 15-20 полета один из двигателей — под замену.
Коллекторные регуляторы сделаны прямо на плате.
В DJI Phantom 3 — та же история, регуляторы на плате, если сдохнет регулятор (бывает при падении, мотор не отключился уперся винтом и регулятор сгорает), менять придется всю плату.
Все разговоры о регуляторах, почему и как, а так же подбор электроники предлагаю вести только в коптероном форуме. Тут такие сообщения будут удаляться.
Здравствуйте! Подскажите, пожалуйста, можно ли вместо MultiWii 328P, использовать MultiWii SE v2.5 ? Насколько сильно они отличаются?
А если использовать APM 2.6? Насколько сложно будет его настроить? Стоит ли его брать?
Можно, но лучше обратиться к тем, кто это делает на проф. основе. Так как потребуется доступ к ЧПУ станку или 3Д принтеру.
Современные GPS/ГЛОНАСС приемники вполне позволяют получить зависание в одной точке.
Для компенсации порывов ветра необходим 3Д подвес.
Подбирать комплектующие необходимо комплексно, обычно начинается с того, что решается какую камеру катать. Затем — рассчитывается масса подвеса (берется готовый или делается самостоятельно), От веса подвеса с камерой стартуется обсчет самого квадрокоптера.
Надо учесть — будет ли 8 моторов на 4-х осях (защита от падения при поломке любого из моторов) или упростить конфигурацию (и удешевить ее) до стандартных 4-х моторов.
Под конфигурацию побираются моторы, регуляторы, аккумуляторы, выбирается полетный контроллер (минимальные настройки или максимальный ручной тюнинг настроек), делаются чертежи и по ним приступают к изготовлению деталей и сборке.
По сути — процесс сборки это рутина. По времени, 90% тратится на подготовительный этап.
Встал вопрос создания 3D модели участка местности с сеткой точек 1м х 1м. Участок 223 Га с перепадами высот по гугл карте от +40 до +140 (холмы). Так как проект не коммерческий, то хочу обойтись своими силами и собрать свой коптер.
Подскажите пожалуйста на какие модели деталей (желательно не шипко дорогие) нужно обратить внимание?
По функциям дрона хотелось бы иметь:
1. Авто взлет
2. Авто посадка
3. Возврат по низкому заряду батареи или нештатной ситуации.
4. Программируемость маршрута и высоты полета (т.е. возможность задания сетки точек для облета до полета.)
5. Камера 4К (или возможность нести на себе аналог Гоупро или Wifi IP камера)
6. Авто Облет препятствий.
7. Дальность 3-5км с обратной связью (в процессе полета видеть что он там снимает и писать на внешний источник поток видео с дрона)
8. Время в полете от 30 минут
9. GPS
10. Возможность записи высот по точкам облета. (высоты над ур. моря точки на земле)
И еще есть пылесосы которые умеют парковаться на базу и заряжаться.
Вопрос. А квадрокоптеры есть такие, которые умеют самостоятельно парковаться на базу для подзарядки??
(это чисто моя фантазия. На стройке для хозяина удобная фишка. Прям с компа стартовать дрон и смотреть за стройкой. или автоматизация охраны, сработал датчик движения и двон стартовал посмотреть и записать что там шевелится. )
Источник