- 4xiDraw Собираем перьевой плоттер на Arduino Часть1
- 4xiDraw Собираем перьевой плоттер на Arduino Часть 2
- 4xiDraw почти готов!
- Axidraw своими руками – AxiDraw — завораживающий робот, способный писать курсивом и рисовать сложные картины
- самодельный перьевой плоттер на Arduino / Habr
- 4xiDraw Собираем перьевой плоттер на Arduino Часть1 — 3DHobbies.ru
- 4xiDraw Собираем перьевой плоттер на Arduino Часть 2 — 3DHobbies.ru
- 4xiDraw почти готов!
- самодельный перьевой плоттер на Arduino
- Мое знакомство с 3д печатью
4xiDraw Собираем перьевой плоттер на Arduino Часть1
Разработчик 4xiDraw: Мигель Санчес
Собственный плоттер он решил собрать, После просмотра видеоролика нового плоттера AxiDraw, который разработан Evil Mad Scientist.
В качестве управляющей платформы он выбрал Arduino Uno.
Шаговые двигатели NEMA 17 и сервопривод SG90 для поднятия и опускания ручки.
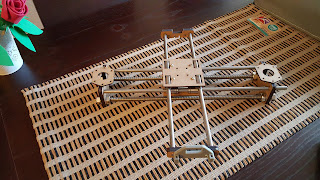
Свою первую модель основы плоттера, вырезал и фанеры на лазером станке:
Как только первая модель была собрана, у Мигеля появились идеи по доработке плоттера используя для этого 3D принтер 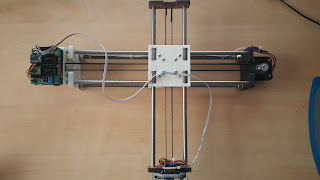
Для сборки «4xiDraw» нам понадобится:
2 шаговых двигателя nema 17 тут
4 8mm Гладкие стержни 2 шт. 400mm и 2 шт. 320mm (куплено в строительном магазине)
2 M10 Резьбовые стержни 400mm (куплено в строительном магазине)
8 LM8UU Линейные подшипники тут
2 GT2 Шкивы тут
10 F623ZZ подшипники тут
1 micro servo SG90 (плюс удлинитель кабеля 250 мм) тут
1 Arduino UNO тут
1 CNCshield тут
2 x Драйвер шагового двигателя A4988 тут
1 GT2 Ремень 1.4 метра тут
8 M10 гайки (куплено в строительном магазине)
8 30mm M3 Винты с гайками (куплено в строительном магазине)
8 6mm M3 Винты (куплено в строительном магазине)
4 16mm M3 Винты с гайками (куплено в строительном магазине)
4 M3 шайбы (куплено в строительном магазине)
2 15mm M3 винты (куплено в строительном магазине)
1 12V 2A блок питания (куплено в магазине электротоваров)
1 USB кабель (в любом магазине электроники)
1 Перьевая ручка ну или просто маркер 🙂
Источник
4xiDraw Собираем перьевой плоттер на Arduino Часть 2
4xiDraw почти готов!
В этой части продолжим сборку и настройку механической части плоттера. Подключим электронику и настраиваем ток драйверов A4988
Для сборки «4xiDraw» использовали:
2 шаговых двигателя nema 17 тут
4 8mm Гладкие стержни 2 шт. 400mm и 2 шт. 320mm (куплено в строительном магазине)
2 M10 Резьбовые стержни 400mm (куплено в строительном магазине)
8 LM8UU Линейные подшипники тут
2 GT2 Шкивы тут
10 F623ZZ подшипники тут
1 micro servo SG90 (плюс удлинитель кабеля 250 мм) тут
1 Arduino UNO тут
1 CNCshield тут
2 x Драйвер шагового двигателя A4988 тут
1 GT2 Ремень 1.4 метра тут
8 M10 гайки (куплено в строительном магазине)
8 30mm M3 Винты с гайками (куплено в строительном магазине)
8 6mm M3 Винты (куплено в строительном магазине)
4 16mm M3 Винты с гайками (куплено в строительном магазине)
4 M3 шайбы (куплено в строительном магазине)
2 15mm M3 винты (куплено в строительном магазине)
1 12V 2A блок питания (куплено в магазине электротоваров)
1 USB кабель (в любом магазине электроники)
1 Перьевая ручка ну или просто маркер 🙂
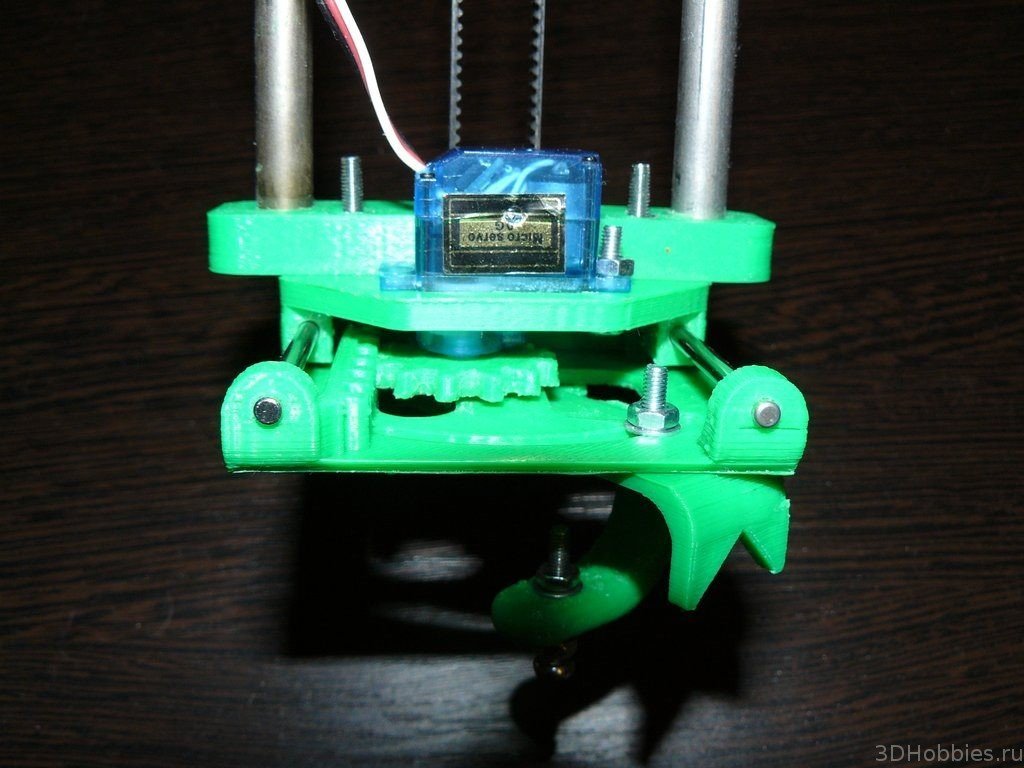
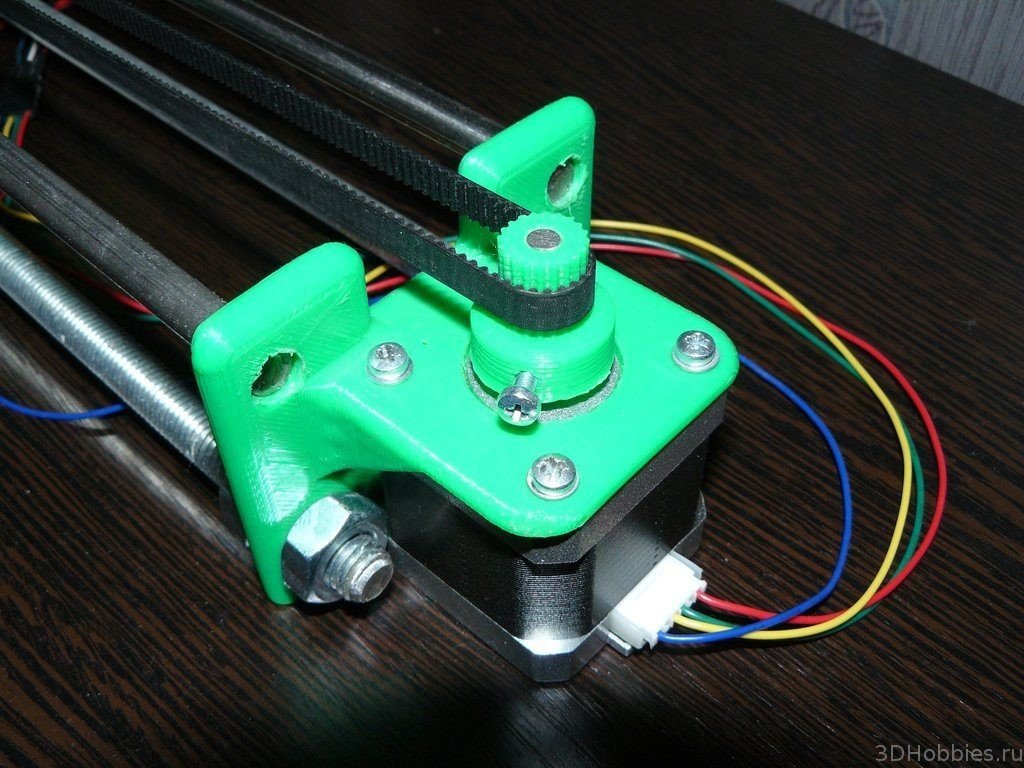
Было решено использовать немного модернизированную конструкцию каретки с шестернёй
Моторы Nema 17HS4401 отлично подошли для нашего проекта 4xiDraw
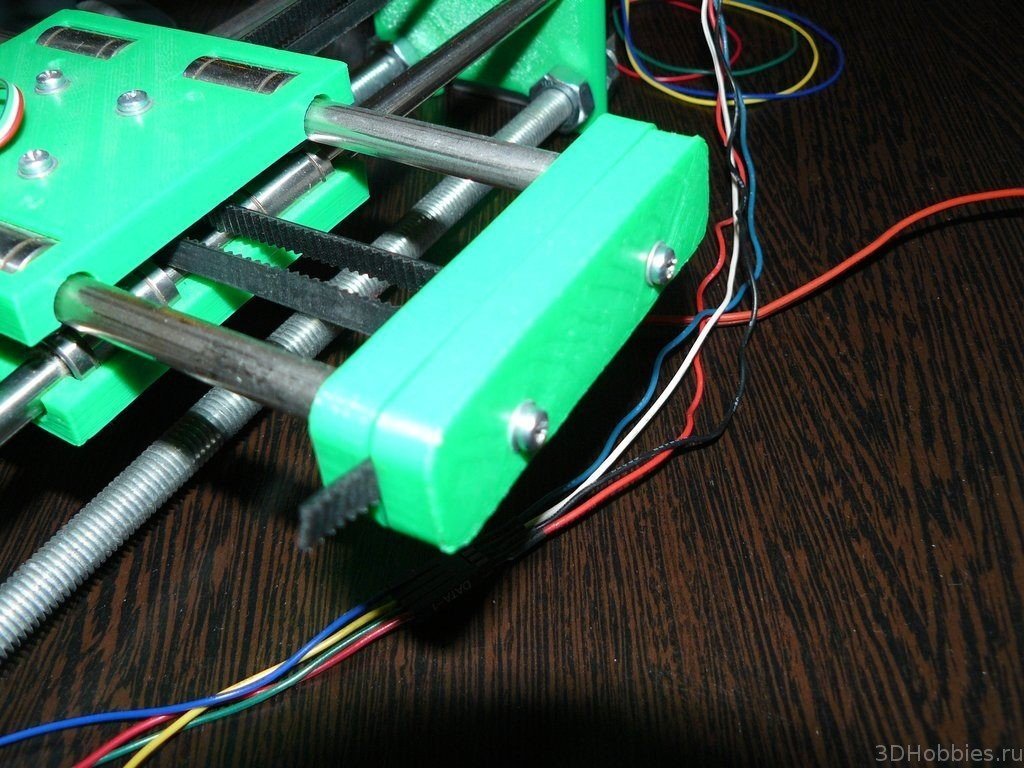
Регулируем натяжение ремня и затягиваем болты
Можно использовать печатные шестерни (20 зубьев)
STLка шестерни для печати
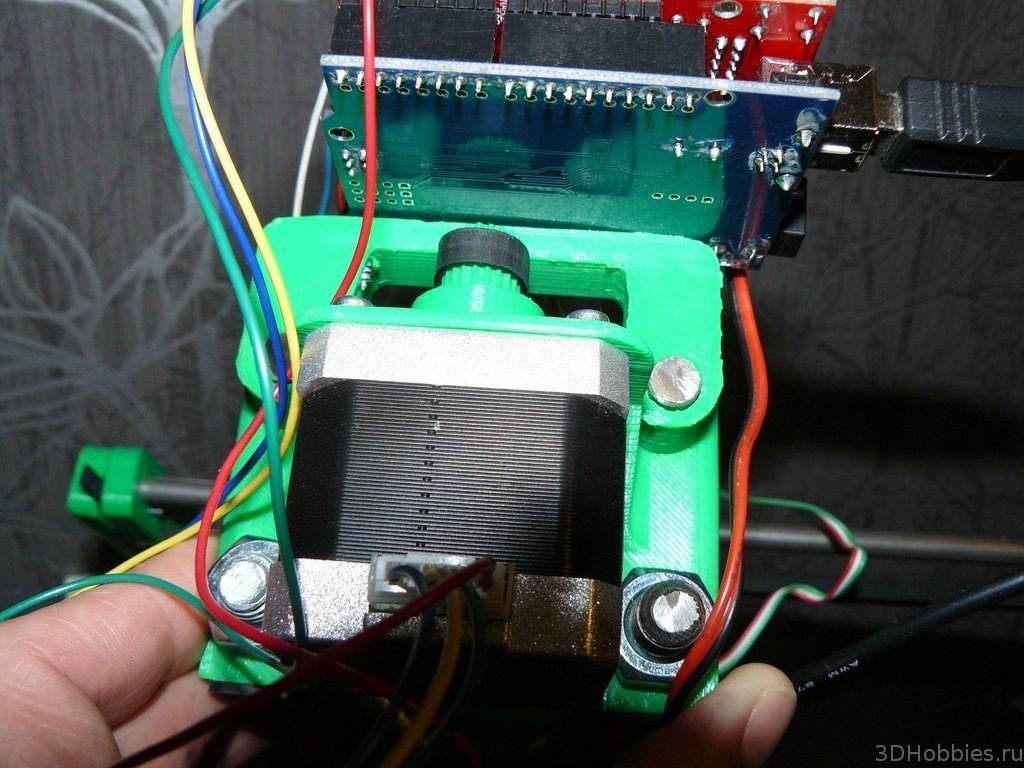
STLка пришлось немного увеличить по высоте держатель для Arduino
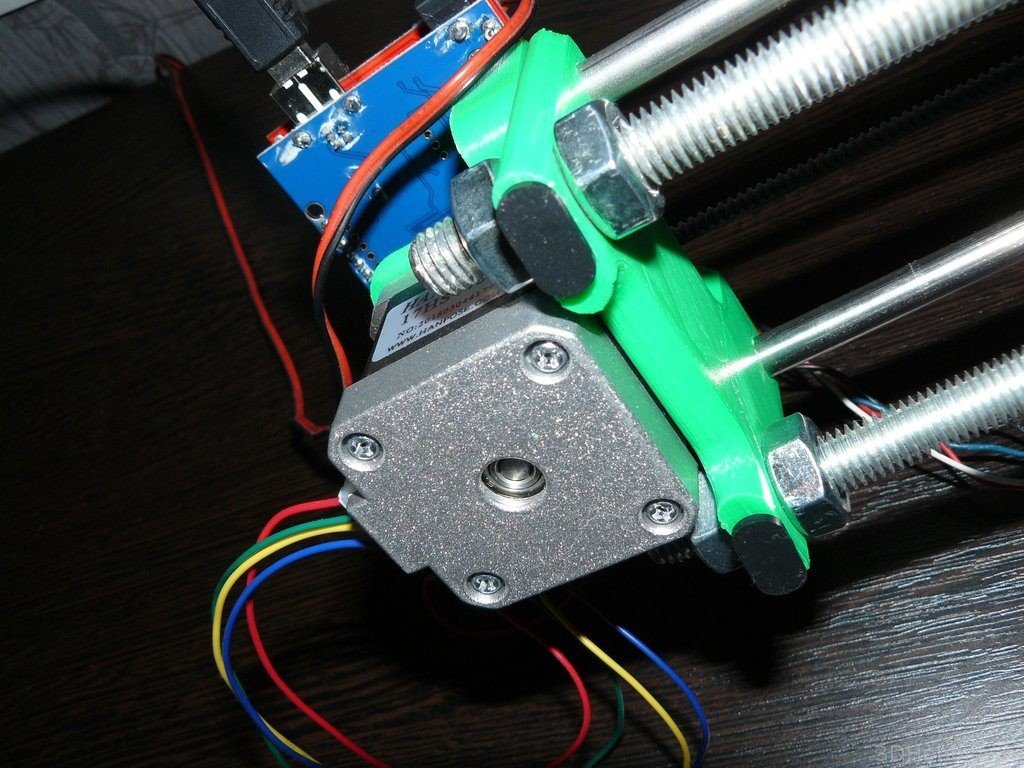
Резиновые накладки на ножки уменьшат немного шум и вибрации при работе плоттера
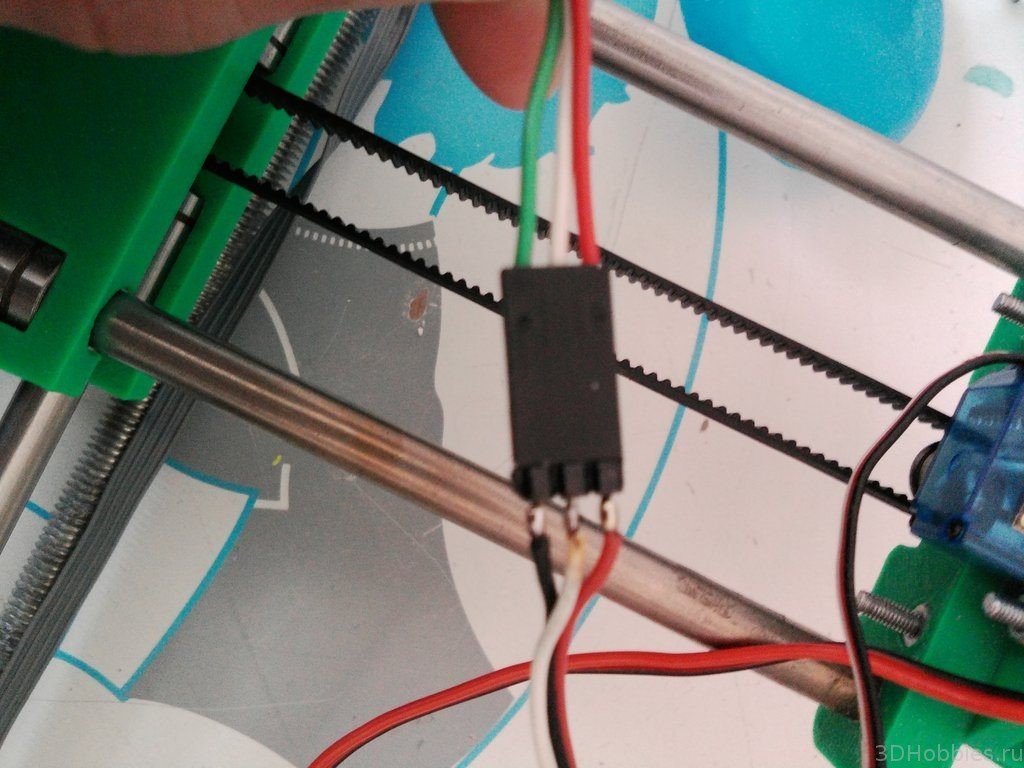
Подключаем servo SG90 нам пришлось использовать удлинитель так как провода от сервопривода очень короткие
красный — красный
белый — белый
чёрный — зелёный
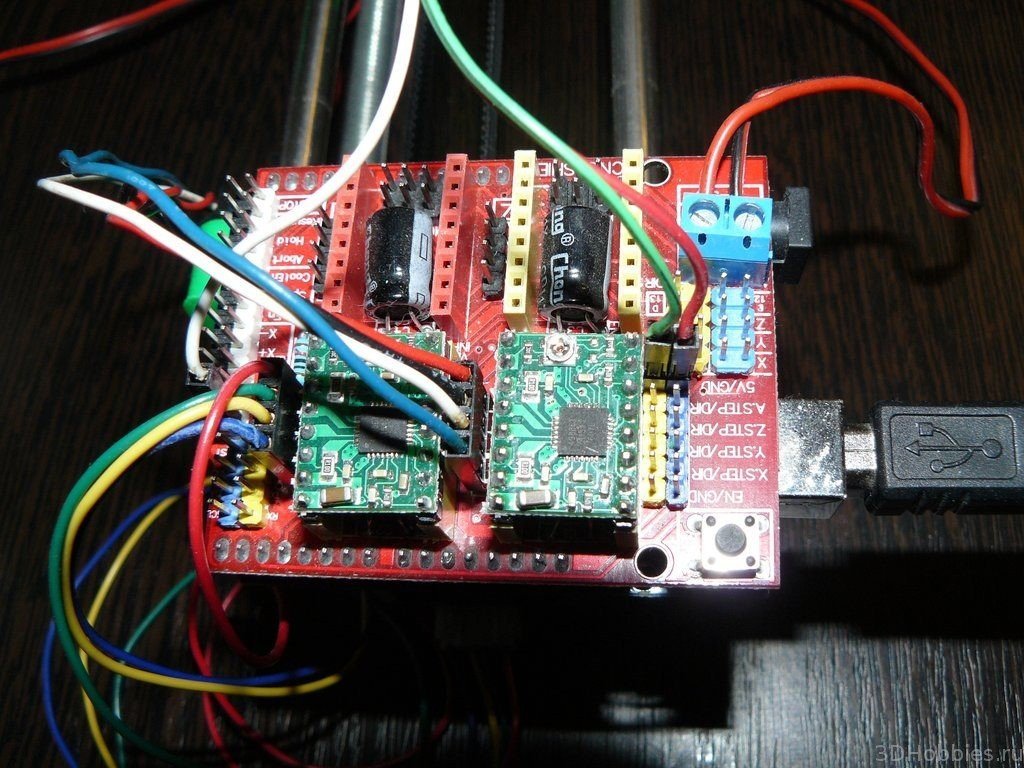
При установке драйверов шагового двигателя A4988 обратите внимание на правильность установки. (иначе нужно будет покупать новые драйвера)
Далее будем настраивать рабочий ток драйверов A4988 для каждого шагового двигателя. Это можно сделать двумя способами:
1. Подключить двигатель в полношаговом режиме и замерить ток на одной обмотки. Он должен быть 70% от номинального тока двигателя. Т.е. для 17HS4401 1,7*0,7= 1,19 А
2. Рассчитать значение Vref — напряжение на переменном резисторе расположенном на драйвере А4988.
Формула Vref для A4988 изменяется от номинала токочувствительных резисторов. Это два черных прямоугольника на плате драйвера. Обычно подписаны R050 или R100.
Vref = Imax * 8 * (RS)
Imax — ток двигателя;
RS — сопротивление резистора. В моем случае RS = 0,100.
Для 17HS4401 Vref = 1,7 * 8 * 0,100 = 1,36 В.
В связи с тем что рабочий ток двигателя равен 70% от тока удержания. Полученное значение нам нужно умножить на 0,7. В противном случае двигателя в режиме удержания будут сильно греться.
Для 17HS4401 Vref ист. = 1,36*0,7 = 0,952 В.
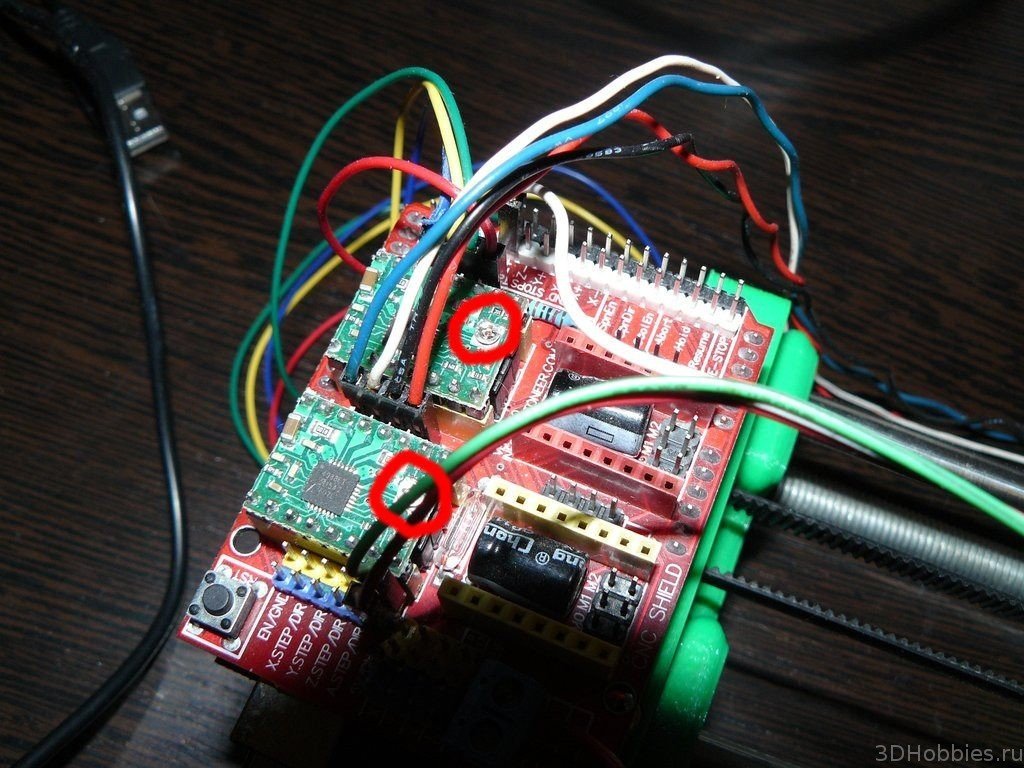
Краткая инструкция настройки тока драйвера шд: Минусовой щуп мультиметра подсоединяем к контакту GND (минус, он общий), плюсовым прикасаемся к корпусу подстроечного резистора на драйвере. Крутим подстроечный резистор отвёрткой и замеряем расчётное напряжение Vref. Таким образом мы выставляем правильный ток для драйвера шагового двигателя. Для каждого вида драйвера своя формула расчета Vref.
На фото подстроечный резистор выделен красным цветом
в 3 заключительной части мы загрузим прошивку и настроим программное обеспечение для рисования
Источник
Axidraw своими руками – AxiDraw — завораживающий робот, способный писать курсивом и рисовать сложные картины
самодельный перьевой плоттер на Arduino / Habr
Перьевые и карандашно-перьевые плоттеры некогда были чрезвычайно популярными. С течением времени их производство начало сокращаться. Но использовать такие системы можно в различных сферах, включая кройку и шитье, инженерную сферу, рисование и т.п. Найти на рынке перьевой плоттер можно, но ведь интереснее сделать его самому, правда?
И пользователь по имени Мигель Санчес (Miguel Sanchez) решил сделать плоттер самостоятельно. В качестве управляющей платформы он выбрал Arduino Uno. В системе также использованы шаговые двигатели NEMA 17 и вспомогательный сервопривод для поднятия и опускания ручки.
Кроме того, используются металлические трубки, ремни и несколько деталей, распечатанных на 3D принтере. Вся эта система довольно простая, и при наличии 3D принтера сделать ее не особо сложно. Интересно, что изначально Мигель решил использовать лазерную резку для создания нужных деталей, но после принял решение работать все же с 3D принтером.
Собственный плоттер Санчес решил создать, вдохновившись моделью AxiDraw, который разработан Evil Mad Scientist.
Вот первая модель основы плоттера, созданная из деталей, вырезанных лазером:
После разработчик решил доработать систему, а также использовать 3D принтер для создания деталей для своего плоттера.
Все модели нужных для распечатки деталей выложены пользователем в общий доступ.
Для того, чтобы отсылать файлы на «печать», умелец использовал программу Universal Serial Sender . Это java-программка, которая идеально справляется со своей задачей. И вот финальный результат работы:
Более подробно о проекте рассказывает сам автор на своем сайте.
4xiDraw Собираем перьевой плоттер на Arduino Часть1 — 3DHobbies.ru
Разработчик 4xiDraw: Мигель Санчес
Собственный плоттер он решил собрать, После просмотра видеоролика нового плоттера AxiDraw, который разработан Evil Mad Scientist.
В качестве управляющей платформы он выбрал Arduino Uno.
Шаговые двигатели NEMA 17 и сервопривод SG90 для поднятия и опускания ручки.
ссылка на вторую часть
ссылка на третью Часть
Свою первую модель основы плоттера, вырезал и фанеры на лазером станке:
Как только первая модель была собрана, у Мигеля появились идеи по доработке плоттера используя для этого 3D принтер
Для сборки «4xiDraw» нам понадобится:
2 шаговых двигателя nema 17 тут
4 8mm Гладкие стержни 2 шт. 400mm и 2 шт. 320mm (куплено в строительном магазине)
2 M10 Резьбовые стержни 400mm (куплено в строительном магазине)
8 LM8UU Линейные подшипники тут
2 GT2 Шкивы тут
10 F623ZZ подшипники тут
1 micro servo SG90 (плюс удлинитель кабеля 250 мм) тут
1 Arduino UNO тут
1 CNCshield тут
2 x Драйвер шагового двигателя A4988 тут
1 GT2 Ремень 1.4 метра тут
8 M10 гайки (куплено в строительном магазине)
8 30mm M3 Винты с гайками (куплено в строительном магазине)
8 6mm M3 Винты (куплено в строительном магазине)
4 16mm M3 Винты с гайками (куплено в строительном магазине)
4 M3 шайбы (куплено в строительном магазине)
2 15mm M3 винты (куплено в строительном магазине)
1 12V 2A блок питания (куплено в магазине электротоваров)
1 USB кабель (в любом магазине электроники)
1 Перьевая ручка ну или просто маркер 🙂
STL Модели
4xiDraw Drawing machine — newEndX_1.stl
4xiDraw Drawing machine — Arduino_grip.stl
4xiDraw Drawing machine — base_with_nuts.stl
4xiDraw Drawing machine — base.stl
4xiDraw Drawing machine — Pen_Carriage_1.stl
4xiDraw Drawing machine — Pen_holder_1.stl
4xiDraw Drawing machine — tensor.stl
4xiDraw Drawing machine — EndY2.stl
4xiDraw Drawing machine — EndY.stl
4xiDraw Drawing machine — newEndX.stl
4xiDraw Drawing machine — newEndX-taller.stl
4xiDraw Drawing machine — servoHolder.stl
4xiDraw Drawing machine — Taller_Arduino_support.stl
Печатаем !
Всё готово начинаем сборку :
Как вариант вместо покупных металлических LM8UU (Линейные подшипники) и GT2 Шкивов можно использовать напечатанные
P.S далие во второй Части продолжим сборку и настройку нашего плоттера
ссылка на вторую часть
ссылка на третью Часть
4xiDraw Собираем перьевой плоттер на Arduino Часть 2 — 3DHobbies.ru
4xiDraw почти готов!
В этой части продолжим сборку и настройку механической части плоттера. Подключим электронику и настраиваем ток драйверов A4988
Для сборки «4xiDraw» использовали:
2 шаговых двигателя nema 17 тут
4 8mm Гладкие стержни 2 шт. 400mm и 2 шт. 320mm (куплено в строительном магазине)
2 M10 Резьбовые стержни 400mm (куплено в строительном магазине)
8 LM8UU Линейные подшипники тут
2 GT2 Шкивы тут
10 F623ZZ подшипники тут
1 micro servo SG90 (плюс удлинитель кабеля 250 мм) тут
1 Arduino UNO тут
1 CNCshield тут
2 x Драйвер шагового двигателя A4988 тут
1 GT2 Ремень 1.4 метра тут
8 M10 гайки (куплено в строительном магазине)
8 30mm M3 Винты с гайками (куплено в строительном магазине)
8 6mm M3 Винты (куплено в строительном магазине)
4 16mm M3 Винты с гайками (куплено в строительном магазине)
4 M3 шайбы (куплено в строительном магазине)
2 15mm M3 винты (куплено в строительном магазине)
1 12V 2A блок питания (куплено в магазине электротоваров)
1 USB кабель (в любом магазине электроники)
1 Перьевая ручка ну или просто маркер 🙂
Было решено использовать немного модернизированную конструкцию каретки с шестернёй
STL carriage_gear, engrenagem
Моторы Nema 17HS4401 отлично подошли для нашего проекта 4xiDraw
Регулируем натяжение ремня и затягиваем болты
Можно использовать печатные шестерни (20 зубьев)
STLка шестерни для печати
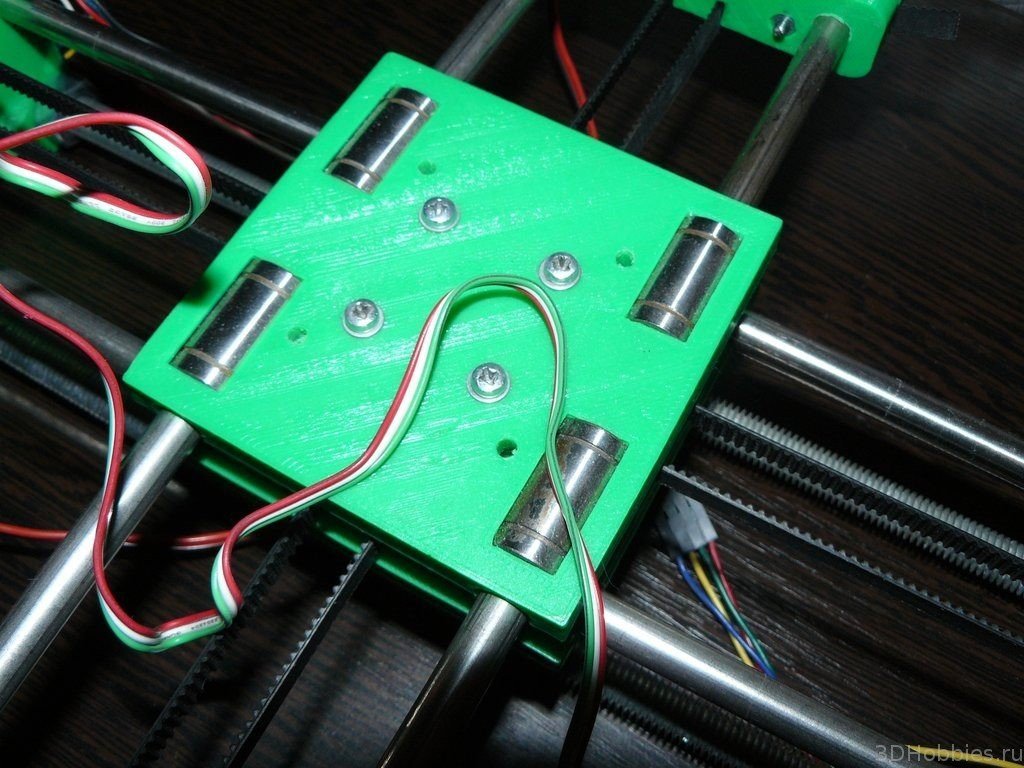
Линейные подшипники LM8UU плотно встали
STLка пришлось немного увеличить по высоте держатель для Arduino
Резиновые накладки на ножки уменьшат немного шум и вибрации при работе плоттера
Подключаем servo SG90 нам пришлось использовать удлинитель так как провода от сервопривода очень короткие
красный — красный
белый — белый
чёрный — зелёный
При установке драйверов шагового двигателя A4988 обратите внимание на правильность установки. (иначе нужно будет покупать новые драйвера)
Далее будем настраивать рабочий ток драйверов A4988 для каждого шагового двигателя. Это можно сделать двумя способами:
1. Подключить двигатель в полношаговом режиме и замерить ток на одной обмотки. Он должен быть 70% от номинального тока двигателя. Т.е. для 17HS4401 1,7*0,7= 1,19 А
2. Рассчитать значение Vref — напряжение на переменном резисторе расположенном на драйвере А4988.
Формула Vref для A4988 изменяется от номинала токочувствительных резисторов. Это два черных прямоугольника на плате драйвера. Обычно подписаны R050 или R100.
Vref = Imax * 8 * (RS)
Imax — ток двигателя;
RS — сопротивление резистора. В моем случае RS = 0,100.
Для 17HS4401 Vref = 1,7 * 8 * 0,100 = 1,36 В.
В связи с тем что рабочий ток двигателя равен 70% от тока удержания. Полученное значение нам нужно умножить на 0,7. В противном случае двигателя в режиме удержания будут сильно греться.
Для 17HS4401 Vref ист. = 1,36*0,7 = 0,952 В.
Краткая инструкция настройки тока драйвера шд: Минусовой щуп мультиметра подсоединяем к контакту GND (минус, он общий), плюсовым прикасаемся к корпусу подстроечного резистора на драйвере. Крутим подстроечный резистор отвёрткой и замеряем расчётное напряжение Vref. Таким образом мы выставляем правильный ток для драйвера шагового двигателя. Для каждого вида драйвера своя формула расчета Vref.
На фото подстроечный резистор выделен красным цветом
в 3 заключительной части мы загрузим прошивку и настроим программное обеспечение для рисования
ссылка на первую Часть
ссылка на третью Часть
самодельный перьевой плоттер на Arduino

Перьевые и карандашно-перьевые плоттеры некогда были чрезвычайно популярными. С течением времени их производство начало сокращаться. Но использовать такие системы можно в различных сферах, включая кройку и шитье, инженерную сферу, рисование и т.п. Найти на рынке перьевой плоттер можно, но ведь интереснее сделать его самому, правда?
И пользователь по имени Мигель Санчес (Miguel Sanchez) решил сделать плоттер самостоятельно. В качестве управляющей платформы он выбрал Arduino Uno. В системе также использованы шаговые двигатели NEMA 17 и вспомогательный сервопривод для поднятия и опускания ручки.
Кроме того, используются металлические трубки, ремни и несколько деталей, распечатанных на 3D принтере. Вся эта система довольно простая, и при наличии 3D принтера сделать ее не особо сложно. Интересно, что изначально Мигель решил использовать лазерную резку для создания нужных деталей, но после принял решение работать все же с 3D принтером.
Собственный плоттер Санчес решил создать, вдохновившись моделью AxiDraw, который разработан Evil Mad Scientist.
Вот первая модель основы плоттера, созданная из деталей, вырезанных лазером:

После разработчик решил доработать систему, а также использовать 3D принтер для создания деталей для своего плоттера.

Все модели нужных для распечатки деталей выложены пользователем в общий доступ.
Для того, чтобы отсылать файлы на «печать», умелец использовал программу Universal Serial Sender . Это java-программка, которая идеально справляется со своей задачей. И вот финальный результат работы:
Более подробно о проекте рассказывает сам автор на своем сайте.
Мое знакомство с 3д печатью
Всем привет ! Решил поучаствовать в конкурсе,и написать статью к конкурсу ‘Мой 3D-принтер’, номинации ‘3D-принтер собранный своими руками’, очень уж заманчивый приз)
Принтер, про который я буду рассказывать, я начал собирать в августе. К тому времени у меня уже был 3д принтер Huxley. Маленький , медленный , еще и качество печати оставляло желать лучшего. В итоге решил собрать другой принтер , на кинематике h-bot. Пошарил в интернете , поглядел на разные модели и решил , что буду собирать принтер ZAV.
Написал Алексею, заказал у него корпус ZAV Max Pro. Решил все таки брать большего размера , мол больше- лучше, думал я. Дальше скачал список деталей, которые необходимы для сборки, и отправился на Али за покупками. После этого был самый неприятный момент- момент ожидания )
Через пару недель мне пришел корпус, и я начал его сборку:

Живу я в общаге, места мало , поэтому собирать приходилось на табуретках ) Хорошо, что к тому времени я уже разжился инструментами.
Сама сборка не составила труда, т.к. в группе есть интрукция с фотками, где все просто и понятно.
После сборки корпуса, спустя пару недель, начали приходить первые запчасти и детали. И мой принтер понемногу начал укомплектовываться

Сборка и установка механики для меня было самым легким этапом(уже сказался опыт предыдущей сборки первого принтера): берешь одну деталь, прикладываешь ко второй, соединяешь винтиком и гаечкой закручиваешь)
Следующий этапом было подключение электроники. Вот тут терпения у меня много ушло , потому что из-за больших размеров принтера длины практически всех проводов не хватало, приходилось удлинять. Еще одним неприятным для меня моментом оказались соединения коннекторов: для того чтобы обжать провод без специальных клещей, нужно изрядно повозиться с плоскогубцами.А там этих соединений только для одного мотора 4 провода. В результате получилось как-то так:

Кстати, питание стола я сначала подключил через клеммы, которые на плате. Но со временем, из-за плохого контакта они начали оплавляться, и я припаял провода напрямую к плате. Все вот это безобразие я сразу не стал убирать, сначала нужно было убедиться в правильности подключения.
Следующим шагом стала прошивка управляющей платы. Тут у меня было 2 варианта: Marlin и Repetier Firmware. Решил поставить вторую. Несколько часов танцев с бубнами, а положительный результат никак не достигался: вроде все параметры установил как надо, но область печати почему-то оставалась как изначально стояла в параметрах, чего бы я не делал. Спрашивал здесь, на других форумах , так решение и не нашел. Плюнул и поставил Марлин, и все заработало) К этому времени уже сильно хотелось чего-нибудь напечатать )
Приступил ка калибровке и окончательной доводке принтера. Напечатал первую тестовую деталь :

Верх у нее поплыл, так как не было обдува модели. Еще пришлось заменить пружинную муфту на напечатанную, т.к. при движении стола вниз, она растягивалась , а потом резко сжималась, движение было рывками.
После настроек и танцев с бубнами, добился вот такого качества :

Далее был период: печатай то, что видишь: вазочки, шестеренки , кубики , подставки под телефон , сердечки.

Сейчас в процессе 2 проекта.Когда изучал 3д печать, также наткнулся и на чпу станки. Посмотрел, что на них можно исполнять . ну и захотелось ) Выбрал проект . в котором все узлы печатаются на принтере. Называется он mostly printed cnc. На каникулах успел собрать только корпус, сейчас уже пришла электроника и моторы, а шпиндель придет только к лету. Собираю я его дома, т.к. в общаге с таким не развернуться. Планирую собрать к августу. Немного фоток процесса сборки корпуса :





На печать деталей фрезера ушло примерно 2кг пластика.
Теперь про второй проект. Наткнулся в интернете на ролик плоттера AxiDraw, ну и что-то зацепило. Решил погуглить, аналоги , и нашел проект 4xiDraw. Прикинул , что по деньгам. Выходит довольно немного: моторы, ардуинка уно+шилд , валы, ну и так по мелочи остального. На данный момент собрано на 90%.



Осталось приспособить опускание и поднимание ручки. Там по идее должны стоять валы 4мм, но где такие взять, пока не знаю. Придется колхозить.
Ну на этом, пожалуй все. Благодарю за внимание ) За качество фоток извиняюсь, фоткал с тапочка.
Источник