- Как на транзисторах сделать блок балансировки на любое количество литий-ионных аккумуляторов
- Понадобится
- Схема и работа контроллера BMS на примере одной ячейки
- Схема на 3 элемента
- Изготовление BMS платы
- Настройка BMS платы
- Схема зарядки
- Смотрите видео
- Балансировочный стенд своими руками на отладочной плате SiLabs C8051F120-TB
- Технология балансировки
Как на транзисторах сделать блок балансировки на любое количество литий-ионных аккумуляторов
Литий-ионные аккумуляторы крайне чувствительны к перезарядке. И стоит только немного перезарядить батарею, как она тут же выходит из строя. Чтобы аккумуляторы равномерно заряжались в последовательной цепи, применяют схемы балансовой защиты, исключающие перезарядку.
Собрать такой контроллер самому на транзисторах довольно не сложно.
Понадобится
Схема и работа контроллера BMS на примере одной ячейки
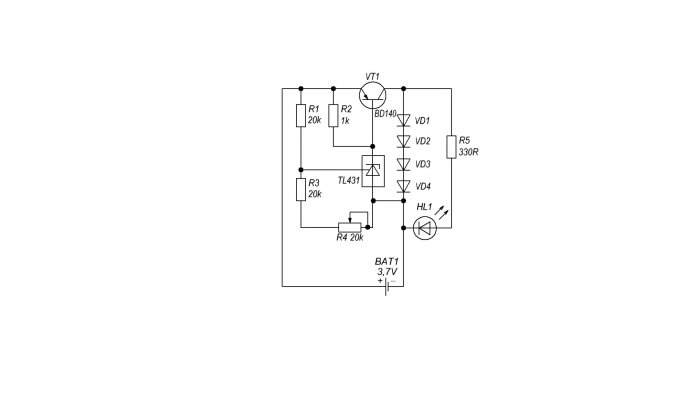
Схема подключается паралельно аккумулятору и контролирует напряжение на нем. При достижения, во время зарядки, напряжения выше 4,2 В блокирует дальнейшее повышение.
В основе стоит микросхема регулируемого стабилизатора TL431. Которая управляет ключом на транзисторе. Транзистор через цепочку диодов блокирует превышение напряжения путем открывания и пропускания лишнего тока через себя. Светодиод служит для индикации и при загорании свидетельствует о полной зарядке батареи.
Если использовать данную схему для каждого элемента, то заряжать их можно последовательно в неограниченном количестве, без перезарядки
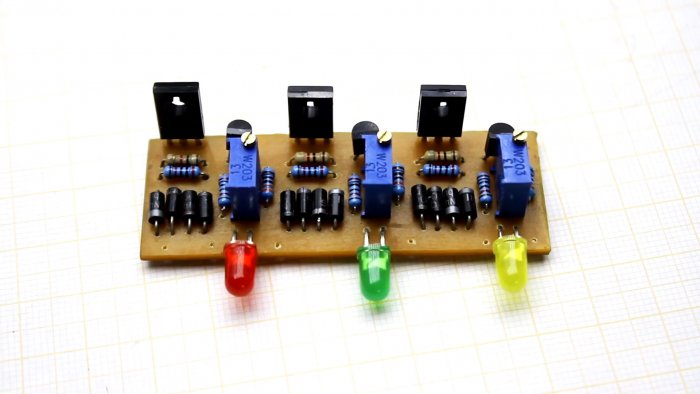
Схема на 3 элемента
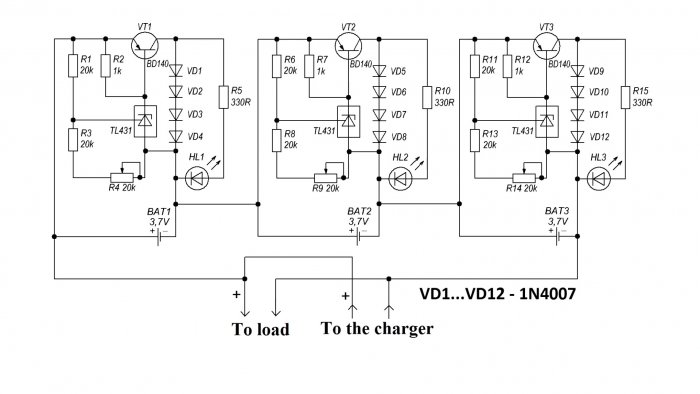
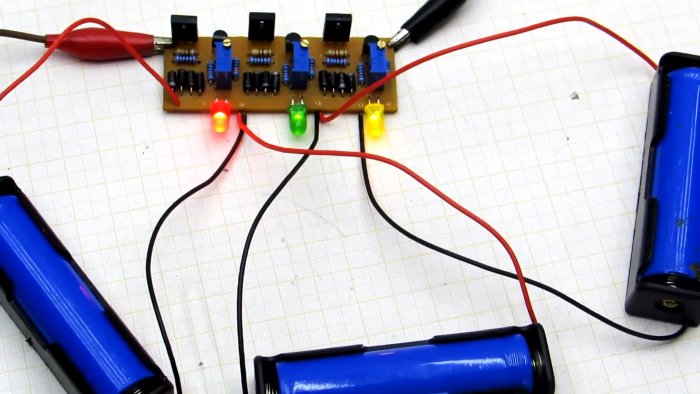
Пример использования батареи из трех АКБ. Паралельно каждому аккумулятору подключен свой контроллер. В результате чего при отклонении параметров и неравномерной зарядке в последовательном соединении, контроллеры не дадут ни одному элементы выйти из строя.
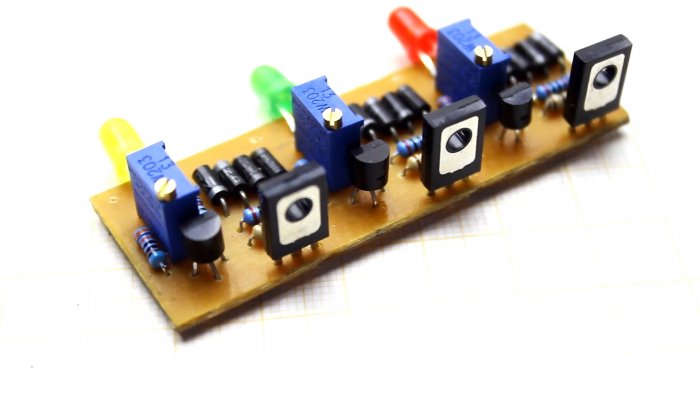
Изготовление BMS платы
Если планируется использовать 3 батареи в одной цепи, то все контроллеры для каждого АКБ можно собрать на одной плате.
Изготавливаем плату и готовим все элементы.
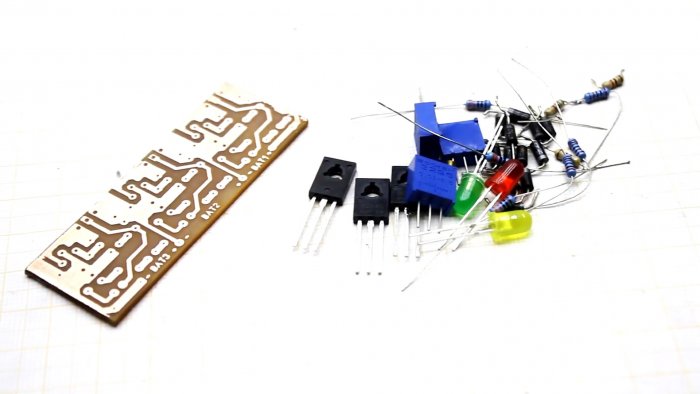
Устанавливаем все детали и припаиваем. Вывода откусываем.
Настройка BMS платы
Перед подключением аккумуляторов в схему каждый контроллер необходимо отрегулировать.
Устанавливаем на блоке питания напряжение 4,2 В и подключаемся к первому контроллеру.

Вращением переменного резистора добиваемся начального свечения светодиодов.
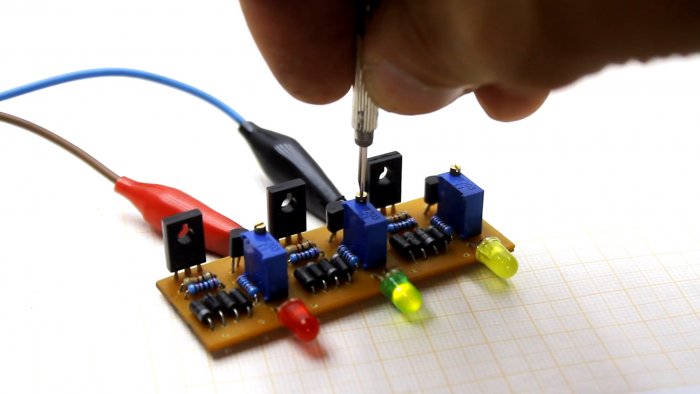
Далее подобным образом настраиваем два последующих контроллера.
Припаиваем провода к плате и подключаем к каждому АКБ.
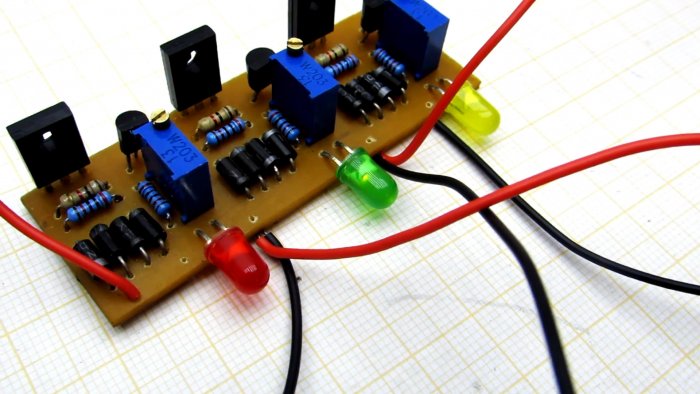
Схема зарядки
Данные контроллеры отслеживают превышение напряжения, но для регулировки тока зарядки нужно собрать еще небольшую схему из двух стабилизаторов, контролирующих ток и напряжение.
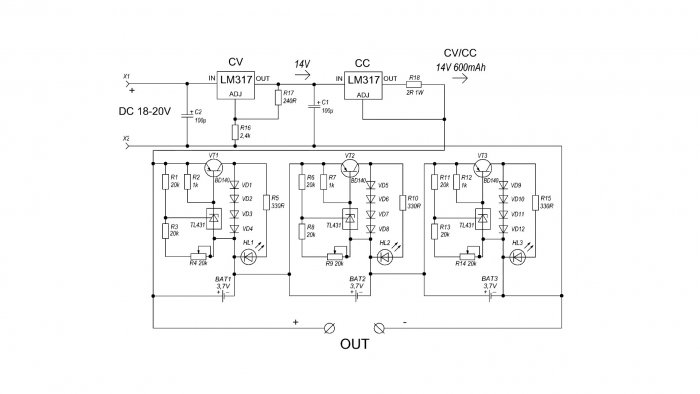
Заряжать линейку из трех АКБ будем от блока питания ноутбука 19 В. Первый стабилизатор на LM317 ограничивает напряжение до 14 В, второй ограничивает ток до 600 мА.
В принципе под все задачи можно было бы использовать одну микросхему LM317, но в данном примере мощности бы ее не хватило, поэтому разбивка была на две микросхемы.
Подключаем схему и производим зарядку АКБ.
Свечение всех светодиодов указывает на завершение зарядки и полном заряде всех элементов.
Вот такая несложная схема поможет быстро и сразу зарядить множество литий-ионных аккумуляторов.
Смотрите видео
Источник
Балансировочный стенд своими руками на отладочной плате SiLabs C8051F120-TB
Если вы задумали отбалансировать что-то вращающееся, будь то колесо, винт самолета или летающая тарелка. Или Вам интересна история, как проходят рабочие будни программиста. Увлекательная история по созданию балансировочного стенда…
Предисловие.
Выражаю благодарность моему руководителю Дмитриеву Ивану Алексеевичу, инженеру конструктору Арапову Андрею, инженерам электронщикам Тураеву Александру и Гидалю Григорьевичу. Этот стенд результат работы сплаченной команды.
Начну с пред истории: Работаю я программистом в организации
Совершенно не секретно, но к делу не относится, скажу лишь, что занимаемся БПЛА
где периодически появляется множество разных интересных задач, и появилась у нас необходимость провести балансировку высокой точности винта самолета. Оборудование для такой балансировки как оказалось можно купить, но стоить это будет очень дорого, решили сделать сами.
Немного расскажу зачем это понадобилось. Наш самолет, с этим винтом, ужасно колбасило на холостых оборотах(800 об/мин). Обычно балансируют такие штуки, статически и динамически. Статическая балансировка заключается в уравновешивании относительно центра вращения, без вращения, а динамическая это уравновешивание во время вращения.
Что касается статической балансировки, то тут все понятно винт просто уравновешивается относительно центра вращения, а вот что делать с динамической балансировкой, когда при вращении винт начинает создавать вибрацию.
Для такой задачи был построен
, состоящий из рамы прикрепленной на пружинках к массивному основанию.
На массивном основании установлен электродвигатель, и через шкив он вращает ось, на которую установлен балансируемый винт. Еще на раме установлены акселерометры, а на ось с винтом датчик холла. Электродвигатель подключен к частотнику, который управляет частотой его вращения.
В качестве измерителя отклонения был использован акселерометр на две оси, через усилитель подключенный на АЦП отладочной платы SiLabs C8051F120-TB. Чтобы отловить момент прохождения вращающегося тела через 0 градусов, был поставлен датчик холла, сигнал с которого подавался еще на одну ножку отладочной платы.
Итак мы получили нехитрый агрегат,
который может измерить ускорение рамы с телом вращения, и подать сигнал о прохождении через 0 градусов вала, вращающего балансируемый винт.
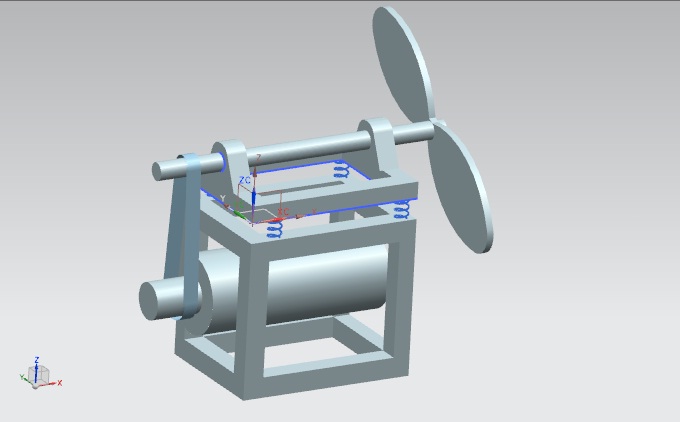
/внешний вид нехитрого девайса/
Мне дали эту конструкцию, и поставили задачу программным путем узнать, какое необходимо количество изоленты , кусочков пластилина или аракала очень точно взвешенных грузов, прилепить на краешек лопасти винта, для того, чтобы он стал отбалансированным. И сделать приложение с удобным и понятным интерфейсом, чтобы за 5 минут можно было разобраться как ею пользоваться.

Сначала я подумал, что управлюсь за один день, и задача очень простая. Но при снятии сигнала осциллографом, обнаружилось, что вибрация всей установки, помехи от электросети, и прочий шум, превращают снятый сигнал с АЦП в равномерный непонятный шум. Хотя если приглядеться, то проглядывается явный периодический максимум и минимум. На отладку программной части и железа ушло около недели, или даже чуть больше, зато потом точность девайса стала радовать глаз.
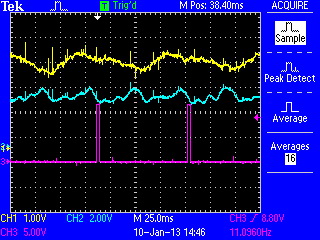
/Показания осцилографа/
На отладочную плату я написал программку, которая снимает показания, и посылает их на COM порт.
Конфигурируем контроллер, определяем основные переменные, выделяем массивы и константы. Готовим отладочную плату к программированию.
Тут мы крутимся постоянно в бесконечном цикле, и отправляем полученные измерения АЦП
Создаем событие для прерывания с ножки, на которую подключен датчик холла
Тут мы мониторим прерывания с датчика Холла.
Чтобы точно знать сколько прошло времени, мы запускаем таймер, и считаем в нем время
Тут мы записываем в буфер измерения АЦП
Для того, чтобы как-то отделить нужные отклонения, на настольном приложении я решил применить преобразование Фурье, которое я до этого использовал для обработки картинок, немного поколдовав с бубном, получилось выделить нужные частоты.
Для разработки интерфейса я использовал C++ Builder 6.0
Для выделения из полученного сигнала нужной частоты, очень полезным оказалось прямое и обратное преобразование Фурье. Данные льются непрерывным потоком, и чтобы успевать их обрабатывать, я применил оптимизированную версию, так называемую FFT . это не панацея, и для обработки видео потока лучше распаралеливать и использовать GPU, но для данной задачи, вполне применимо.
Чтобы прием и расшифровка буфера происходила автоматически, я сделал возможность делать это по таймеру, не совсем удачная идея, сейчас бы я сделал по другому, я бы собирал данные по приходу в отдельном потоке, и передавал на вывод, чтобы не мешать интерфейсу ввода и другим приложениям. Однако и такой вариант оказался жизнеспособным, и со своей задачей справился вполне успешно.
В итоге получилась довольно удобная программка, которая показывает, в какую сторону существует дисбаланс, и приноровившись приклеивая кусочки аракала по 0,15г удалось достаточно точно отбалансировать винт.
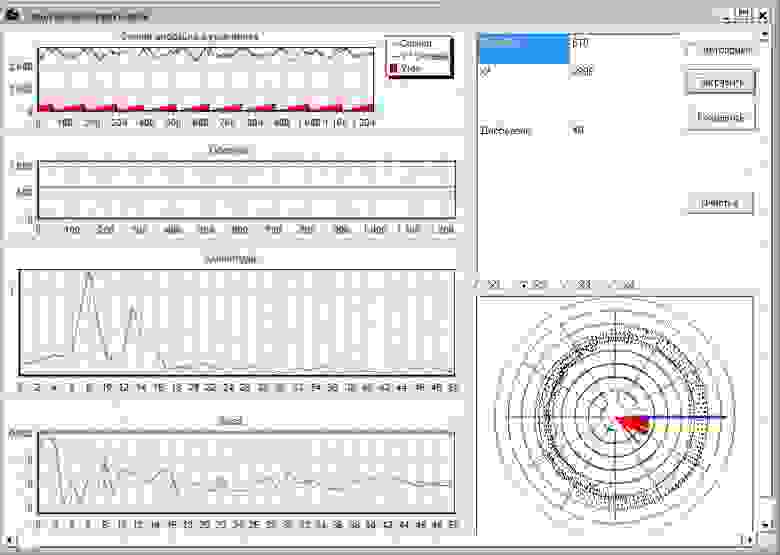
/Сама программка в работе/
Если посмотреть на пики по частотам, то можно заметить, что ярко выражены две амплитуды, как выяснилось одна отвечает за вибрацию винта, а вторая создается электромотором, так как он подключен через ремень и крутиться быстрее. Таким образом балансируя винт мы минимизируем первый пик, прикрепляя грузик соразмерный с отклонением круга, на противоположенную сторону.
Источник
Технология балансировки
Статья «Обработка сигналов датчиков балансировочной машины» позволяет понять построение электронной схемы по измерению дисбаланса, назначение её радиокомпонентов для обработки исходного сигнала пьезодатчиков балансировочной машины. На фотографии балансировочная машина имеет цифровой выход показателей дисбаланса по каналам, в статье рассматривается упрощённый вариант с указателями дисбаланса на гальванических приборах.

Балансировка вращающих частей машин и механизмов — обязательное условие их безаварийной работы. Отсутствие должной балансировки приводит к раскручиванию крепёжных изделий, как бы крепко они не были закреплены. Это приводит к неизбежным аварийным ситуациям.
На низких оборотах вращения, дисбаланс вращающих частей агрегата незаметен, с повышением оборотов вибрация, как следствие небаланса, увеличивается по амплитуде и непринятие мер приводит к поломке не только агрегата, но и механизма в целом.
Дисбаланс во вращающихся лопастях турбины или корабельного винта или турбины (облом куска одной лопасти, попадание инородного материала, поломка подшипника, гидроудар…) приводит к раскачке и поломке агрегата.
Дисбаланс в колесе автомобиля (разная толщина резины покрышки, некачественная резина, повреждения металлического диска…), как правило приводит к аварии с тяжёлыми последствиями.
Балансировку автомобильных колёс авторами проводились многократно в шиномонтажной мастерской, с контрольной проверкой на стенде.
Балансировка, как правило, проводится в двух режимах — статическом и динамическом.
Дисбаланс определяется установкой колеса (или винта корабля) на вал, закреплённый одним или двумя концами на тяжёлую станину. Угловой конус с зажимом позволяют «посадить» испытуемое изделие на вал балансировочной машины, без эксцентрика.
В статическом режиме колесо проворачивается на угол достаточный, чтобы вес дисбаланса установился в нижнем положении — эта часть колеса тяжелее. Для компенсации дисбаланса достаточно закрепить в верхней части колеса свинцовый «грузик», по весу компенсирующий дисбаланс противоположной стороны. Таким методом можно добиться довольно высоких результатов балансировки.
Там где грузики по техническим причинам нет возможности закрепить, снимается металл(на винтах) или резина (на гоночных автомобилях).
Динамический режим балансировки позволяет более качественно устранить небаланс.
В этом режиме определяется точное значение и положение этого дисбаланса на колесе, с раскручиванием внешним электродвигателем вала балансировочной машины через редуктор, до максимальных оборотов. Вращение исследуемого колеса на эксплуатационных оборотах позволяет выявить возможные дефекты дисбаланса с точным масштабированием.
Информация о дисбалансе снимается кварцевыми датчиками, закрепленными на стойках (опорах ) подшипников вала балансировочной машины и далее обрабатывается цифровой или аналоговой схемой с выдачей информации о весе дисбаланса, его положении и угле.
Характеристики прибора:
Напряжение питания +/-15Вольт.
Ток потребления 100 мА
Диаметр колёс 12-15 дюймов.
Вес дисбаланса 10-100 грамм.
Количество каналов 2
Погрешность измерения 10%.
Для понимания условий масштабирования динамической балансировки предложена принципиальная схема:
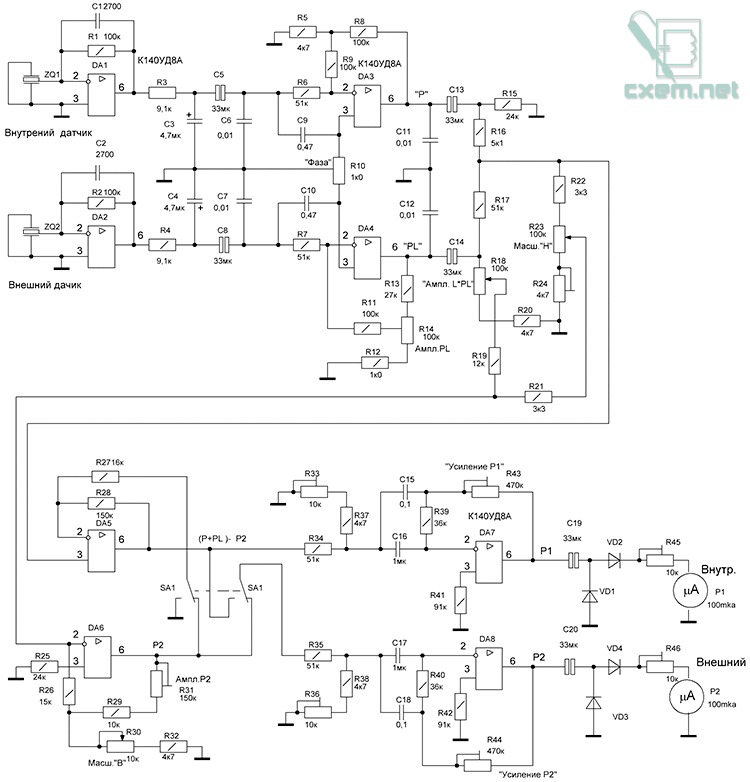
Два канала усиления сигнала датчиков позволяют достаточно точно выполнить балансировку колёс в динамическом режиме.
В состав схемы входят: предварительные усилители сигнала датчиков дисбаланса ZQ1, ZQ2; фильтр верхних частот; регулятор фазы – R10 с последующем усилением сигнала; аналоговый мост масштабирования с установочными резисторами R18 — произведения дальности(от датчиков) до внутренней поверхности колеса на амплитуду сигнала датчика внешней стороны колеса, R23 — масштаба толщины колеса; R30 — масштаба диаметра колеса; сумматора уровней сигнала внешнего и внутреннего канала на усилителе DA5 и оконечных усилителей веса дисбаланса на микросхемах DA7, DA8.
Схема усилителей внутренней и внешней стороны, исследуемого в динамическом режиме колеса, выполнена на операционных усилителях постоянного тока с большим коэффициентом усиления, предназначенных для работы с глубокой обратной связью. Параметры схем полностью определяются видом и характеристиками элементов, включенных в цепь обратной связи.
Почти все усилители в схеме балансировки выполнены с преобразованием входного сигнала поступающего на инвертирующий вход, выходной сигнал имеет фазу противоположную входному. Коэффициент передачи — К при инвертирующем включении определяется параметрами элементов цепи обратной связи К= -Rос / Rвх.
Поскольку неинвертирующий вход микросхем заземлён, то инвертирующий вход можно рассматривать как точку «кажущейся земли».
Входные каскады усилителей на микросхемах DA1-DA2 имеют коэффициент передачи не менее 100,что достаточно для предварительного усиления сигналов внешнего и внутреннего датчика сигналов на основе пъезоэлементов ZQ1-ZQ2.
Из-за наличия в цепи обратной связи ёмкостей, частота входного сигнала ограничена на уровне 1200 Гц, усилители работают как интеграторы верхних частот. Это позволяет снять входные высокочастотные шумы от внешних механических воздействий на источник сигнала с высоким сопротивлением. Т- образный мост на выходах усилителей DA1,DA2 дополнительно снижает полосу частот до 120 Герц. Через конденсаторы С9,С10 сигналы поступают на неинвертирующие входа дифференциальных усилителей — 3DA3, 3DA4, и через резисторы R6,R7 на инвертирующие входа- 2DA3, 2DA4, что создаёт фильтр высоких частот с частотой среза 20 Герц.
Разность двух входных напряжений сигналов и является сочетанием инвертирующего и неинвертирующего входа усилителей.
Выходное напряжение сигнала равно — U вых = Rос/ Rвх (U1-U2). U1,U2 — напряжение на входах операционных усилителей. Поскольку напряжение на инвертирующих входах ниже, из-за ограничительных резисторов в цепи подачи сигнала, а неинвертирующие входа подключены к источнику сигнала через конденсаторы небольшой ёмкости, выполняется фазозависимая схема усиления двух каналов с регулировкой резистором R10.
Амплитуду выходного сигнала усилителя на микросхеме DA4 возможно дополнительно выставить резистором R14, им же меняется частота среза.
Оба сигнала с выходов усилителей 6 DA3, 6 DA4 через неполярные конденсаторы C13, C14 поступают для масштабирования на мост, одно из плеч которого составляют резисторы R17, R18, R20 в другом плече резисторы R22,R23,R24.
Диагональ моста, состоящая из резисторов R19,R21 подключена к движкам установочных резисторов R18,R23 — для масштабирования.
Колебания в датчиках, установленных на стойках подшипников крепления вала балансировочной машины — одинаковой полярности, но разные по амплитуде, ввиду разнесения стоек крепления подшипников. Это позволяет при использовании двух каналов обработки сигнала небаланса алгебраически суммировать их в точке соединения резисторов R16,R17, с учётом положения подстроечного резистора R14-амплитуда внешнего датчика и фазы обработки – резистора R10. Суммарный сигнал поступает на неинвертирующий вход 3 микросхемы DA5.
Установленная резистором R23 ширина исследуемого колеса ( в сантиметрах), с амплитудой зависящей от положения резистора R18 — расстояния от левого (внутреннего) датчика до внутренней поверхности колеса в сантиметрах, установленного на вал балансировочной машины.
Перемычкой моста является цепь из резисторов R19, R21. Диаметр колеса устанавливается резистором R30 — «масштаб-В» в дюймах или сантиметрах.
Сигнал на инвертированный вход микросхемы 2DA6 поступает с точки соединения резисторов R19,R21 моста.
С выхода 6DA6 инвертированный сигнал обратной полярности через переключатель SA1 поступает на инвертируемый вход 2DA5, в результате дифференцирования (суммирования) двух противоположных по полярности и разной амплитуде сигналов на выходе 6 микросхемы DA5 определяется суммарный сигнал, который, через ограничительный резистор R34, поступает на инвертируемый вход 2 оконечного усилителя DA7 внутреннего канала усиления.
Сигнал внешнего датчика с выхода 6 микросхемы DA6, после установки соответствующей амплитуды резистором R31, через резистор R35 также поступает на вход оконечного усилителя правого (внешнего датчика) канала 2 DA8.
Интегрирование сигналов перед поступлением на оконечные усилители происходит с помощью входных RC мостов с подстройкой резисторами R33, R36. Дополнительно амплитуду сигнала внешнего канала возможно подкорректировать резистором R31.
Переключатель SA1 позволяет отрегулировать идентичные уровни усиления выходных усилителей DA7, DA8 включенных входами от одного выхода сигнала микросхемы 6DA5.
Выходные усилители имеют частотную коррекцию и подстройку усиления микросхем DA7, DA8 резисторами R43 -«усиление Р1», R44- «Усиление Р2».
Уровень сигнала внутренней и внешней стороны небаланса колеса, после обработки электронной схемой индицируется аналоговым или цифровыми приборами PA1, РА2.
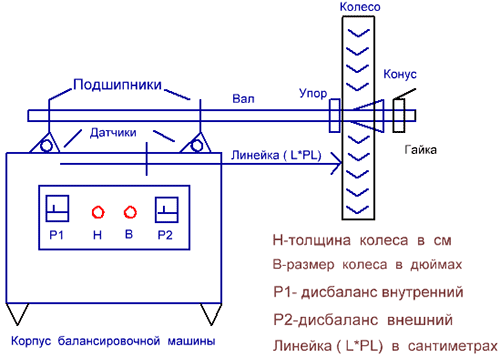
Регулировка правильно выполненной схемы заключается в установке линейки — L, механически связанной с резистором R18 — «Амплитуда L*PL», от левого датчика сигнала до внутренней стороны исследуемого на дисбаланс колеса. Шкала резистора R23 – « Масштаб Н» обозначена в сантиметрах толщины колеса, резистора R30 — «Масштаб В» в дюймах диаметра.
Для регулировки режимов работы схемы берётся ранее отбалансированное колесо. Ручками регуляторов диаметра — R30 и ширины – R23 выставляются размеры колеса, а длина линейки до колеса резистором R18. На внешней стороне колеса закрепляется условный небаланс весом в 100 грамм. После динамического вращения, как правило электродвигателем с передаточным механизмом, приборы P1 или P2 должны показать этот вес, Р2 величиной около 100 грамм, а Р1 от 10 до 100 грамм. Резистором R43 – усиление Р1,снижаются показания до 10 грамм., при наличии расхождений в показаниях, коррекция выполняется регулятором «Амплитуда PL» — R14, при среднем положении подстроечных резисторов R45, R46. Положение груза на внутренней или наружной поверхности колеса регулируется линейкой резистора R18.
После правильной установки веса груза по приборам, проводится устранение дисбаланса – на противоположной стороне колеса устанавливается груз по весу равный дисбалансу, далее после прокручивания колеса, показания веса на измерительных приборах будут близкими к нулю и не превышать десяти граммов.
Такие результаты являются достаточными для дальнейшей эксплуатации колеса.
Авторы: Коновалов Владимир, Вантеев Александр
Источник