- Бесколлекторник своими руками
- Создание и тестирование бесколлекторного мотора
- Вступление
- Описание мотора
- Измерение характеристик
- Результаты тестирования
- Электробайк. Контроллер двигателя своими руками
- Применение
- Устройство двигателя
- Цикл работы
- Транзисторы и Н-мост
- Прототип на Ардуино
- Мостовые драйверы
- Аппаратное прерывание
- Прототип на базе микросхемы MC33035
- Планы на будущее контроллера
Бесколлекторник своими руками
@@ Конструктивные особенности CD-ROM движков очень разные. Поэтому в этой статье даются общие рекомендации по переделке таких двигателей с минимальными затратами в 3 фазные авиамодельные двигатели.
@@ Требования к CD-ROM движкам (данные приведены для двигателей, которые реально переделывались):
- Число зубцов (полюсов) ротора должно быть равным 9
- Количество устанавливаемых заново магнитов — 12
- Диаметр ротора: 28.5 мм
- Высота ротора: 7.8 мм
- Диаметр оси: 3 мм
- Длина оси: 6.8 мм
- Диаметр статора: 24 мм
- Высота статора: 5.2 мм
- Вес переделанного двигателя — 21 г
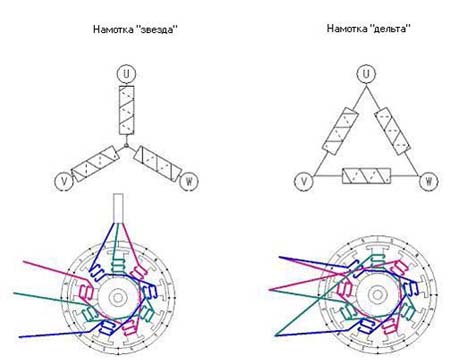
- Тип намотки — дельта
- Намотка проводом диаметром — 0,4-0,5 (желательно ПЭТВ)
- Количество витков — 17-20 на зуб




@@ Используемые клеи: «111», фиксаторы резьбы (продаются в автомагазинах).
@@ Используемая эпоксидная смола: любая не российская и не 5-минутка.
Подготовительные работы
@@ На внутренней стороне ротора приклеено намагниченное пластмассовое кольцо. Аккуратно удалите его. Это можно сделать следующим образом: согнутый и нагретый гвоздь вводится в пластмассу. Даем ему остыть, и осторожно вытягиваем пластмассовое кольцо
@@ Статор отсоединяем от пластины, на которой он крепится (вариантов крепления очень много и поэтому я не привожу технологию — в каждом конкретном случае решайте сами как это сделать). Отсоединения статора, аккуратно удаляем с него намотку, Стараемся не повредить заводскую лакировку.
Перемотка
@@ Перемотку статора ведут медным проводом, диаметром 0.4mm — 0.5mm. На каждый полюс мотаем от 17 до 20 витков.



@@ Чем меньше витков, тем больше обороты, большее количество витков позволяет получить более высокий вращающийся момент. Изоляция провода должна остаться неповрежденной — это критично, иначе ваш двигатель не будет работать.

@@ Вы можете выбрать между типом намотки «дельты» и «звезда». С намоткой «звезда» двигатель будет иметь более высокий вращающий момент, меньше оборотов в минуту и будет «есть» меньше. Намотка «дельта» даст «более горячий» двигатель с более высокими оборотами в минуту и большим КПД, но будет иметь больший «аппетит» и будет греться больше. Намотка «звезда» «тяжелее» для работы контроллера.






Проверка качества
@@ Проверка качество намотки производится мультиметром. Провод НЕ ДОЛЖЕН быть сломан или с поврежденной изоляцией. Сопротивление обмоток должно быть примерно одинаковым. Провода обмотки не должны быть закорочены между собой или на статор (в случае повреждения изоляции). Если вы не уверены, что нет повреждений или «коротыша» — снимайте намотанный провод и мотайте еще раз. Соедините, закрепите и пропаяйте выводы обмоток. Сопротивление обмоток
0,1-0,14 ом на фазу.
Установка новых магнитов в ротор
@@ ОЧЕНЬ ВАЖНО — магниты должны быть установлены с соблюдением полярности — N-S-N-S . иначе ваш двигатель не будет работать. Хороший способ проверять полярность состоит в том, чтобы разместить 12 магнитов на столе в один ряд, в таком же порядке приклеивать магниты в стакан ротора. Для приклеивания используйте высококачественный клей (не используйте эпоксидную смолу 5-минутку).



@@ Добейтесь равномерного размещения магнитов в стакане ротора. Как можно это сделать: устанавливая магниты в стакан, прокладывайте их тонкими кусочками бумаги одинаковой толщины, если один из зазоров получился больше, то увеличьте толщину бумаги. Расстояние между магнитами должно быть одинаковым. Не пожалейте времени, чтобы сделать эту работу. После установки магнитов и их приклейки, заполните промежутки между ними эпоксидной смолой. Будьте осторожны, не перелейте смолы.
Испытание
@@ Трения между ротором и магнитами не должно быть. Если движение при проворачивании без значительного усилия и толчков, то можете пробовать запускать собранный двигатель.
@@ ВЫ МОЖЕТЕ изменить направление вращения, меняя 2 из этих 3 контактов между двигателем и контроллером.
Источник
Создание и тестирование бесколлекторного мотора
В этой статье мы хотели бы рассказать о том, как мы с нуля создали электрический мотор: от появления идеи и первого прототипа до полноценного мотора, прошедшего все испытания. Если данная статья покажется вам интересной, мы отдельно, более подробно, расскажем о наиболее заинтересовавших вас этапах нашей работы.
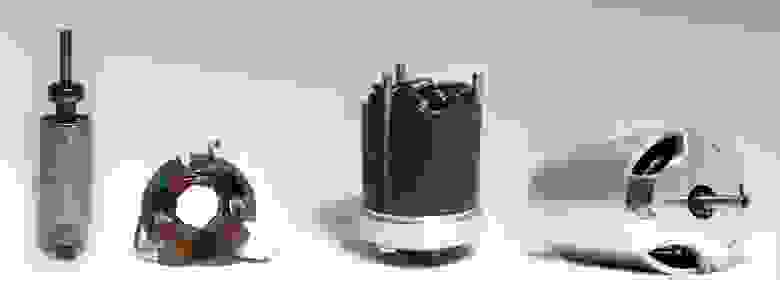
На картинке слева направо: ротор, статор, частичная сборка мотора, мотор в сборе
Вступление
Электрические моторы появились более 150 лет назад, однако за это время их конструкция не претерпела особых изменений: вращающийся ротор, медные обмотки статора, подшипники. С годами происходило лишь снижение веса электромоторов, увеличение КПД, а также точности управления скоростью.
Сегодня, благодаря развитию современной электроники и появлению мощных магнитов на основе редкоземельных металлов, удаётся создавать как никогда мощные и в то же время компактные и легкие “Бесколлекторные” электромоторы. При этом, благодаря простоте своей конструкции они являются наиболее надежными среди когда-либо созданных электродвигателей. Про создание такого мотора и пойдет речь в данной статье.
Описание мотора
В “Бесколлекторных моторах” отсутствует знакомый всем по разборке электроинструмента элемент “Щетки”, роль которых заключается в передаче тока на обмотку вращающегося ротора. В бесколлекторных двигателях ток подается на обмотки не-двигающегося статора, который, создавая магнитное поле поочередно на отдельных своих полюсах, раскручивает ротор, на котором закреплены магниты.
Первый такой мотор был напечатан нами 3D принтере как эксперимент. Вместо специальных пластин из электротехнической стали, для корпуса ротора и сердечника статора, на который наматывалась медная катушка, мы использовали обычный пластик. На роторе были закреплены неодимовые магниты прямоугольного сечения. Естественно такой мотор был не способен выдать максимальную мощность. Однако этого хватило, что бы мотор раскрутился до 20к rpm, после чего пластик не выдержал и ротор мотора разорвало, а магниты раскидало вокруг. Данный эксперимент сподвиг нас на создание полноценного мотора.
Узнав мнение любителей радиоуправляемых моделей, в качестве задачи, мы выбрали мотор для гоночных машинок типоразмера “540”, как наиболее востребованного. Данный мотор имеет габариты 54мм в длину и 36мм в диаметре.
Ротор нового мотора мы сделали из единого неодимового магнита в форме цилиндра. Магнит эпоксидкой приклеили на вал выточенный из инструментальной стали на опытном производстве.

Статор мы вырезали лазером из набора пластин трансформаторной стали толщиной 0.5мм. Каждая пластина затем была тщательно покрыта лаком и затем из примерно 50 пластин склеивался готовый статор. Лаком пластины покрывались чтобы избежать замыкания между ними и исключить потери энергии на токах Фуко, которые могли бы возникнуть в статоре.

Корпус мотора был выполнен из двух алюминиевых частей в форме контейнера. Статор плотно входит в алюминиевый корпус и хорошо прилегает к стенкам. Такая конструкция обеспечивает хорошее охлаждение мотора.

Измерение характеристик
Для достижения максимальных характеристик своих разработок, необходимо проводить адекватную оценку и точное измерение характеристик. Для этого нами был спроектирован и собран специальный диностенд.

Основным элементом стенда является тяжёлый груз в виде шайбы. Во время измерений, мотор раскручивает данный груз и по угловой скорости и ускорению рассчитываются выходная мощность и момент мотора.
Для измерения скорости вращения груза используется пара магнитов на валу и магнитный цифровой датчик A3144 на основе эффекта холла. Конечно, можно было бы измерять обороты по импульсам непосредственно с обмоток мотора, поскольку данный мотор является синхронным. Однако вариант с датчиком является более надёжным и он будет работать даже на очень малых оборотах, на которых импульсы будут нечитаемы.
Кроме оборотов наш стенд способен измерять ещё несколько важных параметров:
- ток питания (до 30А) с помощью датчика тока на основе эффекта холла ACS712;
- напряжение питания. Измеряется непосредственно через АЦП микроконтроллера, через делитель напряжения;
- температуру внутри/снаружи мотора. Температура измеряется посредством полупроводникового термосопротивления;
Для сбора всех параметров с датчиков и передачи их на компьютер используется микроконтроллер серии AVR mega на плате Arduino nano. Общение микроконтроллера с компьютером осуществляется посредством COM порта. Для обработки показаний была написана специальная программа записывающая, усредняющая и демонстрирующая результаты измерений.

В результате наш стенд способен измерять в произвольный момент времени следующие характеристики мотора:
- потребляемый ток;
- потребляемое напряжение;
- потребляемая мощность;
- выходная мощность;
- обороты вала;
- момент на валу;
- КПД;
- мощность уходящая в тепло;
- температура внутри мотора.
Видео демонстрирующее работу стенда:
Результаты тестирования
Для проверки работоспособности стенда мы сначала испытали его на обычном коллекторном моторе R540-6022. Параметров для этого мотора известно достаточно мало, однако этого хватило, чтобы оценить результаты измерения, которые получились достаточно близкими к заводским.
Затем уже был испытан наш мотор. Естественно он смог показать лучшее КПД(65% против 45%) и при этом больший момент(1200 против 250 г на см), чем обычный мотор. Измерение температуры тоже дало достаточно хорошие результаты, во время тестирования мотор не нагревался выше 80 градусов.
Но на данный момент измерения пока не окончательны. Нам не удалось измерить мотор в полном диапазоне оборотов из-за ограничения мощности источника питания. Также предстоит сравнить наш мотор с аналогичными моторами конкурентов и испытать его “в бою”, поставив на гоночную радиоуправляемую машину и выступить на соревнованиях.
Источник
Электробайк. Контроллер двигателя своими руками
Как вы уже знаете из прошлых постов, у нас в компании есть DIY-движение. В свободное от работы время коллеги занимаются фрезеровкой печатных плат в домашних условиях, делают тепловизор на FLIR Lepton, а также решают семейные разногласия с помощью 4 контроллеров и 2 умных часов. Продолжим серию увлекательный историй! Сегодня я расскажу, как сделать контроллер к трехфазному двигателю электровелосипеда своими руками. Целью создания такого контроллера было:
- Изучение работы трехфазного мотора под управлением контроллера.
- Большинство контроллеров для электровелосипедов, представленных на рынке, — китайские. Они хоть и относительно дешевые (около 2.000 руб в зависимости от мощности), но являются неведомой коробкой, в которой неизвестно что происходит. И сразу к ней возникает очень много вопросов — экономично ли она потребляет и распределяет ток, какой у нее запас мощности, почему так сильно перегревается, преждевременно срабатывает защита по току и т.д.
В тоже время на рынке представлены европейские качественные контроллеры для электробайков. Они оснащаются расширенными функциями, работают на разных напряжениях и токах и их можно программировать. Устанавливаются они на сверхмощные электровелосипеды. Но цена у них кусается — 10-20 тыс. рублей.
В итоге я решил пойти своим путем: разобраться в устройстве контроллера, сделать его прототип, а затем попытаться сделать контроллер качественнее китайского контроллера. На текущий момент проект у меня в разработке только и на уровне прототипа, готового варианта пока нет. Буду рад услышать ваши комментарии и советы.
Применение
В электровелосипедах используются трёхфазные бесщёточные электродвигатели с датчиками Холла. Стоит отметить, что применение подобных трёхфазных двигателей достаточно обширно:
- Бытовая техника
- Оргтехника
- Электротранспорт
- Промышленность
Устройство двигателя
Для разработки контроллера необходимо разобраться с принципом работы самого электродвигателя.

Электродвигатель состоит из фазных обмоток, магнитов и датчиков Холла, отслеживающих положение вала двигателя.
Конструктивно электродвигатели делятся на два типа: инраннеры и аутраннеры.
У инраннеров магнитные пластины крепятся на вал, а обмотки располагаются на барабане (статоре), в этом случае в движение приводится вал. В случае аутраннера всё наоборот: на валу — фазные обмотки, а в барабане — магнитные пластины. Это приводит в движение барабан.
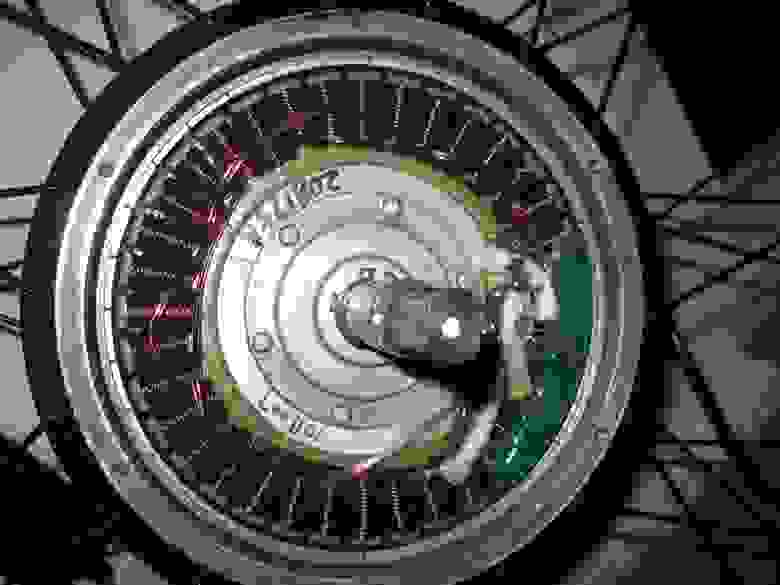
Так как у велосипеда колесо крепится валом на раму, то здесь применителен тип аутраннера.
На этой картинке условно представлены три фазы с обмотками, соединёнными между собой. В реальности обмоток намного больше, они располагаются равномерно с чередованием по фазам по окружности двигателя. Чем больше обмоток — тем плавнее, чётче, эластичнее работает двигатель.
В двигатель устанавливаются три датчика Холла. Датчики реагируют на магнитное поле, тем самым определяя положение ротора относительно статора двигателя. Устанавливаются с интервалами в 60 или 120 электрических градусов. Эти градусы относятся к электрическому фазному обороту двигателя. Необходимо учитывать, что чем больше в двигателе обмоток на каждую фазу, тем больше происходит электрических оборотов за один физический оборот мотор-колеса.
Обмотки трёх фаз в большинстве случаев соединяются между собой по двум схемам: звезда и треугольник. В первом случае ток проходит от одной из фаз к другой, во втором — по всем трём фазам в разной степени. Иногда эти две схемы подключения комбинируют в одном двигателе, например в электромобилях. При старте и наборе скорости идёт соединение фаз по звезде: она даёт больший момент при относительно низких оборотах; далее, после набора скорости, происходит переключение на треугольник, в результате количество оборотов увеличивается, когда уже не нужен большой крутящий момент. По сути, получается условно автоматическая коробка передач электродвигателя.
Цикл работы
Чтобы привести в движение трёхфазный двигатель, нужно рассмотреть цикл его работы за электрический оборот. Итак, имеем три фазы — A, B, C. Каждая из фаз получает положительную и отрицательную полярности в определённый момент времени. Поочерёдно по шагам пропускается ток от «плюса» одной фазы к «минусу» другой фазы. В итоге получается шесть шагов = три фазы × две полярности.
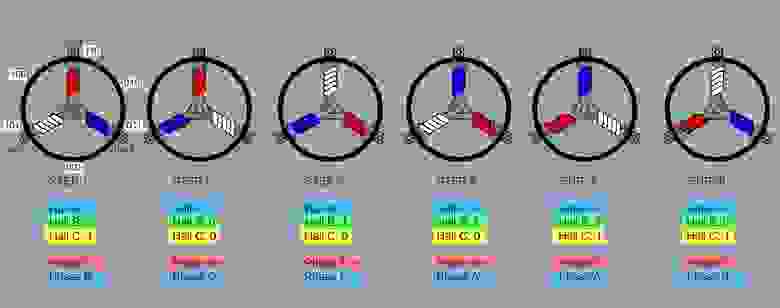
Рассмотрим эти шесть шагов цикла. Предположим, что положение ротора установлено в точке первого шага, тогда с датчиков Холла мы получим код вида 101, где 1 — фаза А, 0 — фаза B, 1 — фаза С. Определив по коду положение вала, нужно подать ток на соответствующие фазы с заданными полярностями. В результате вал проворачивается, датчики считывают код нового положения вала — и т. д.
В таблице указаны коды датчиков и смена комбинаций фаз для большинства электродвигателей. Для обратного хода колеса (реверса) достаточно перевернуть знаки полярности фаз наоборот. Принцип работы двигателя довольно прост.
Цикл двигателя представлен в gif-анимации.
Транзисторы и Н-мост
Но чтобы поочерёдно подавать ток на каждую из фаз и менять их полярность, необходимы транзисторы. Ещё нам нужна передача больших токов, высокая скорость переключения и чёткость открытия/закрытия затворов. В данном случае удобнее управлять затворами по напряжению, а не по току. Поэтому оптимальны полевые (MOSFET) транзисторы. Чаще всего их используют в контроллерах. Очень редко можно встретить комбинированный вариант транзисторов.
Для переключения фаз со сменой их полярностей используют классическую схему Н-моста (H-Bridge) из полевых транзисторов.
Он состоит из трёх пар транзисторов. Каждая из пар подключается к соответствующей фазе обмотки двигателя и обеспечивает подачу тока со значением (+ или –). Транзисторы, отвечающие за включение фазы с положительным значением, называют верхними ключами. С отрицательным — нижними. Для каждого шага открывается пара ключей: верхний одной фазы и нижний соседней фазы. В результате ток проходит от одной фазы к другой и приводит электродвигатель в движение.
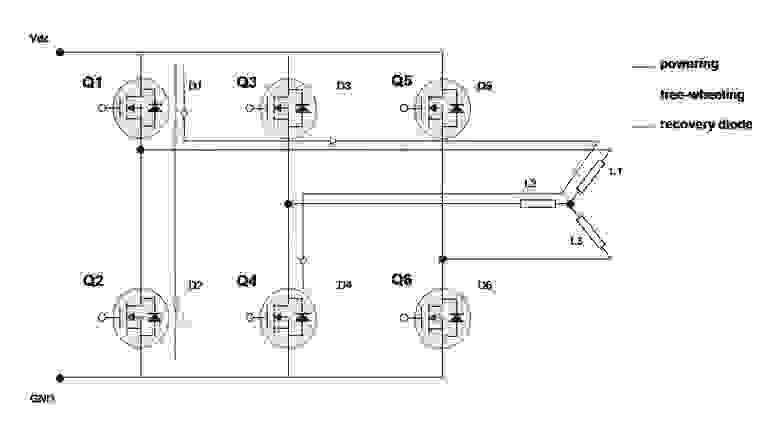
Из схемы видно, что мы не можем включить одновременно верхний и нижний ключ у одной и той же фазы: произойдёт короткое замыкание. Поэтому очень важно быстрое переключение верхних и нижних ключей, чтобы в переходных процессах не появилось замыкание. И чем качественнее и быстрее мы обеспечим переключения, тем меньше у нас будет потерь и нагрева/перегрева транзисторов H-моста.
Для запуска остаётся обеспечить управление затворами ключей H-моста. Для управления H-мостом нужно:
- Считать показания датчиков Холла.
- Определить, в каком положении какую пару ключей включать.
- Передать сигналы на соответствующие затворы транзисторов.
Прототип на Ардуино
Под рукой у меня была Arduino UNO, и я решил собрать контроллер на её основе.
Первым делом я подал на датчики Холла питание 5 вольт от Ардуино (его достаточно для датчиков). Сигнальные провода от датчиков подключил на цифровые пины Ардуино, написав простейшую программу для считывания и обработки сигналов с датчиков.
Затем собрал Н-мост из полевых NPN-транзисторов. Подвёл к мосту независимое питание на 12 вольт. Но при отладке, чтоб убедиться в работоспособности, я подключил напрямую шесть пинов 5V из Ардуино на затворы H-моста. У большинства полевых транзисторов затвор работает на 20 вольт. Так делать нельзя, потому что Н-мост будет плохо работать и перегреваться. Но для кратковременных тестов это пойдёт. Кое-как, с сильными перегревами и страшными звуками, вибрациями и толчками колесо медленно закрутилось. Начало положено.
Мостовые драйверы
Далее предстояла работа над напряжением 20 вольт на управление затворами. Для этого существуют мостовые драйверы транзисторов, они обеспечивают стабильные импульсы в 20 вольт на затвор и высокую скорость отклика. Сначала у меня были популярные драйверы для маломощных моторов L293D.
Для управления затворами его достаточно, к тому же их очень просто использовать. Один такой драйвер может обеспечить питанием две пары ключей. Поэтому я взял две штуки L293D. Собрал контроллер с этими драйверами, и колесо начало крутиться существенно плавнее, посторонних звуков стало меньше, нагрев транзисторов уменьшился. Но при увеличении оборотов синхронизация с контроллером пропадала, появлялся посторонний звук, колесо дёргалось, вибрировало и полностью останавливалось.
В это же время я наткнулся на два варианта мостовых драйверов:
- HIP4086

- IR2101
Что касается HIP4086, то это полноценный мостовой драйвер, предназначенный для трёхфазного электродвигателя. Мне он показался несколько замороченным, и мои попытки использовать его в контроллере не увенчались успехом: он у меня так и не заработал. Углублённо разбираться в причинах не стал.
А взял я IR2101 — полумостовой драйвер, обеспечивающий работу нижнего и верхнего ключей для одной фазы. Несложно догадаться, что таких драйверов нужно три. К слову, драйвер очень прост в использовании, его подключение происходит безболезненно и легко. Получилась такая схема:
И готовый результат
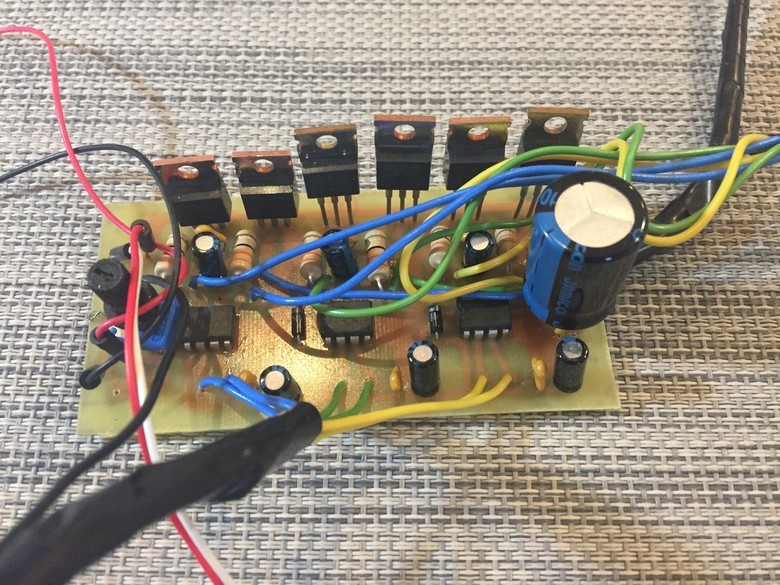
Собрал контроллер с этим драйвером и запустил двигатель. Ситуация с работой электродвигателя кардинально не поменялась, симптомы остались те же, как и в случае с драйвером L293D.
Аппаратное прерывание
И тут я понял, в чём дело: Ардуино не успевает обрабатывать показания датчиков Холла! Поэтому необходимо было использовать пины Ардуино с аппаратным прерыванием. Так как у Ардуино УНО таких пинов всего два, а под датчики нужно три пина, надо взять Ардуино Леонардо или Искра Нео, где таких пинов — четыре штуки.
Переписав программу под прерывания и подключив Искру Нео вместо УНО, я повторил испытания.
Колесо наконец-то заработало чётко, без вибраций, шумов, отлично стало набирать обороты без рассинхронизации. Прототип оказался жизнеспособным. Но это ещё не полноценный контроллер, поскольку в нём не было обвязки с защитами и обеспечением качественного ШИМ-сигнала.
Прототип на базе микросхемы MC33035
Параллельно с разработкой контроллера на Ардуино я рассматривал альтернативные варианты логической части контроллера. И это привело меня к микросхеме MC33035. Это старая разработка от Motorola, сейчас её выпускает ON Semiconductor. Создана специально для мощных трёхфазных двигателей.
- Отвечает за всю логическую часть контроллера
- Считывает показания с датчиков Холла
- Определяет положения вала
- Выдаёт сигналы для затворов Н-моста на их драйверы
- Имеет возможность подключения индикатора ошибок, перегрева
- Обрабатывает и передает ШИМ-сигнал (PWM)
- Осуществляет реверс (обратный ход колеса)
Одним словом, микросхема содержит всё необходимое для управления электродвигателем. Её стоимость очень низкая: на Алиэкспрессе — около 50 рублей. Для сборки полноценного контроллера на её основе потребуется микросхема MC33035, полумостовые драйверы и Н-мост из полевых транзисторов. Я также собрал контроллер на этой микросхеме. Работает отлично, стабильно, колесо крутится как надо на различных оборотах. Но функционал микросхемы ограничен, если необходимо наворотить различные функции, вывод на дисплей скорости, одометр, расход батареи, то опять же возникает необходимость дополнительно подключить Ардуино или что-то аналогичное.
Схема с MC33035
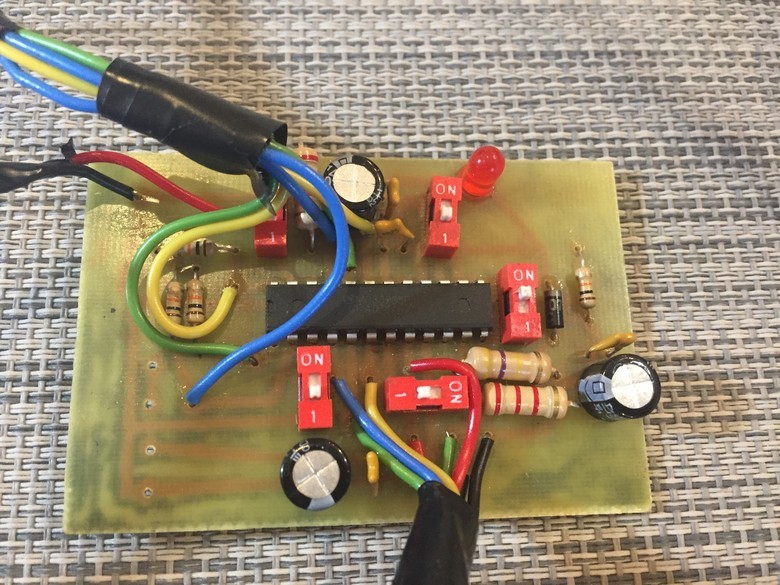
Главное преимущество контроллера на базе MC33035 — это простота в использовании. Просто покупаете микросхему, собираете Н-мост, спаиваете всё на плату с небольшой обвязкой — и контроллер готов. Если нужно просто запустить двигатель с ШИМ-сигналом и управлять им — оптимальный вариант.
Контроллер на базе Ардуино — вариант сложнее, понадобится писать логику, обеспечивать дополнительные защиты контроллера. Но для экспериментов, прототипов, дополнительного функционала, использования различных режимов работы двигателя — подходящий вариант. Поэтому я решил пока отложить MC33035 и продолжить работу с Ардуино.
Планы на будущее контроллера
Продолжая работу над контроллером, планирую сделать следующее:
- IGBT-транзисторы для H-моста вместо полевых транзисторов.
- Обвязку с защитами по току, перегреву и т. п.
- Полноценный круиз-контроль с возможностью выставлять необходимую скорость движения.
- Расходомер. Когда задаётся необходимое расстояние, а контроллер, исходя из этого значения и заряда аккумулятора, дозирует разряд аккумулятора на всём протяжении маршрута так, чтобы зарядки хватило.
Источник