Бесполезная коробка
Модернизируем своими руками игрушку Useless box
Наверное, вы знаете, что такое бесполезная коробка. В Интернет попадается много предложений таких игрушек. Это действительно абсолютно бесполезная вещь. Но лично мне очень понравилось это бесполезное в самом прямом смысле слова, но очень оригинальное по своей сути устройство. В конце концов, ведь все детские игрушки — это бесполезные вещи.
Выглядит устройство как обыкновенный прямоугольный ящик с крышкой. На верхней плоскости коробки имеется тумблер Вкл\Выкл. Все, что нужно сделать – включить его. Но стоит только щелкнуть тумблером, как из-под крышки коробки тут же покажется палец, который приведет тумблер в исходное положение. Вот, собственно и все. Но при некоторой доле фантазии в таком поведении можно найти определенный философский смысл.
Можно сделать бесполезную коробку своими руками, но все-таки в игрушке главное — внешний вид. А сделать аккуратную и красивую коробочку не так-то просто. У меня лично главная проблема всегда возникает именно с корпусом для своих конструкций.

На Aliexpress много предложений разных вариантов бесполезных коробок, нужно просто набрать в поиске «Useless box». Предлагаются как самые простые, без какого-либо интеллекта, так и более крутые, с контроллером и звуковыми эффектами. Стоимость простейшего варианта начинается примерно с 8. 10 USD. Более навороченные стоят 20. 30 USD.
Согласитесь, что современный россиянин вряд ли согласится заплатить 30 USD за абсолютно бесполезную вещь. Более того, он сразу же усомнится в умственных способностях и здравом смысле любого, кто так поступит. Ведь сейчас главной и всячески поощряемой чертой характера стала жадность.
Хотя жадность и не является доминирующей чертой моего характера, все же я не решился тратить более 10 USD на приобретение этого гаджета. Поэтому заказал простой вариант, но в симпатичном деревянном корпусе.

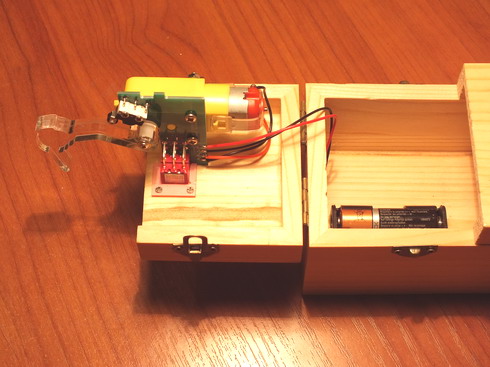
Все работает, коробка сделана довольно аккуратно. Внутри все предельно просто — конечный выключатель, двигатель с редуктором и две батарейки. Соответственно и поведение незамысловатое, без каких-либо эффектов.
Пользуясь наличием свободного времени (COVID-19!) я решил модернизировать приобретенную бесполезную коробку и немного разнообразить ее реакцию на манипуляции с тумблером. Благо, что в Интернет много самодельных вариантов Useless box на Arduino. К сожалению, в очередной раз пришлось все делать самому. Дело в том, что во всех интеллектуальных бесполезных коробках с контроллерами используется сервопривод, а в моем, простейшем варианте установлен просто электродвигатель с редуктором.
Сервопривод — это электродвигатель с обратной связью, т.е. он поворачивает исполнительное устройство на какой-то заданный угол. А электродвигатель просто вращается, пока на него подается напряжение. Так что никакие готовые программы я не смог использовать, пришлось разрабатывать собственную схему блока управления и писать свой вариант программы.
Я решил, что в такой игрушке не должно быть ничего лишнего, никаких выключателей питания. Гаджет должен быть постоянно готов к работе, но в спящем состоянии он не должен расходовать энергию батареи. Питание тоже решил оставить 3 вольта — 2 батарейки. Использовать плату Arduino оказалось нецелесообразно, на ней много лишнего, что увеличивает бесполезное потребление дефицитной энергии. В данном случае нужен только контроллер. В своем «ящике с хламом» я нашел ATmega48. Этот контроллер гарантированно работает при напряжении 2,7 вольта и имеет встроенный тактовый генератор. От используемого в Arduino ATmega328 он отличается, в основном, меньшим объемом памяти, что в данном случае не имеет значения.
Переделки коробки минимальны. От штатной схемы нужно отпаять двигатель и батарею, перерезать одну дорожку и установить одну перемычку на плате. Изменения показаны цветом на рисунке. Таким образом, от штатной схемы используется только пара контактов от тумблера и конечного выключателя. Вооружившись мультиметром и своим собственным интеллектом внести эти изменения в схему штатной платы не составит труда.
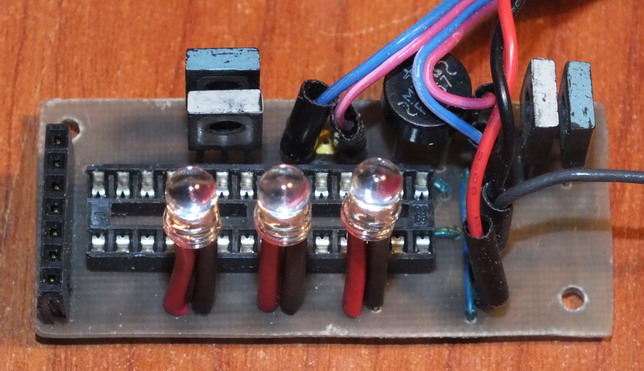
А вот схема дополнительного блока с контроллером. Как оказалось, двигатель потребляет довольно существенный ток — около 350 мА, поэтому транзисторы должны не просто выдерживать такой ток, но и обеспечивать минимальное падение напряжения при этом. Подходят старые советские КТ814, КТ815 или КТ816, КТ817 с любым буквенным индексом. Можно поискать и какие-нибудь полевые транзисторы, но необходима комплементарная пара, которая может открываться напряжением не более 2,5 вольт. Конкретные типы я не искал. VD1 — выпрямительный мостик подходящего габарита и с допустимым током до 1 ампера.
Все пассивные компоненты в SMD корпусах типоразмера 1206 или 0805, контроллер в DIP корпусе. Блокировочный конденсатор по питанию неполярный, керамический. Ставить электролит нежелательно, т.к. это увеличит потребляемый в спящем режиме ток. Хотел использовать для световых эффектов синий светодиод, но он практически не светится от 3 вольт. Пришлось ограничиться красным, зеленым, желтым. Желательно использовать яркие светодиоды.
Первоначально я планировал использовать PWM для регулировки скорости двигателя. К сожалению, не получилось. Момент двигателя на пределе, нужно поднимать напряжение питания и использовать редуктор с бОльшим передаточным отношением. Если первое еще можно сделать, то второе уже проблематично. Пришлось довольствоваться тем, что есть.
Плата изготовлена из одностороннего фольгированного стеклотекстолита и имеет размеры 60×26 мм. Вид со стороны печатных проводников, при печати для лазерно-утюжной технологии нужно ставить галочку «зеркально».
На плате предусмотрены контактные площадки для внутрисхемного программирования контроллера. Для этой цели необходим программатор. В данном случае важно правильно установить FUSE биты. Нужно поставить галочку SPIEN, выбрать режим «Brown-out detection disable» и «Int.RC Osc 8 MHz. Start-up time RWRDN/RESET 6CK/14CK+65ms». Т.е. нужно запрограммировать следующие байты FUSE: Extended = 0xFF, High = 0xDF, Low = 0xE2.

Плата размещается внутри коробки рядом с батарейками. Налаживания устройство не требует, через несколько секунд после включения коробка готова к работе. Я запрограммировал несколько вариантов реакции на переключение тумблера, они выбираются каждый раз случайным образом. Если быстро нажимать тумблер, он выключается без эффектов. Сложные варианты поведения появляются реже, чем простые.
При первом включении тумблера коробка пробуждается от сна и возвращает тумблер обратно без эффекта. В этот момент происходит калибровка, сводящая к минимуму влияние разряда батарей на алгоритм работы устройства. Если игрок бездействует в течение 8 секунд, бесполезная коробка засыпает. В режиме сна потребляемый ток менее 1 мкА, он практически не будет влиять на срок службы батареи. Лучше использовать дешевые солевые батарейки, применять что-нибудь типа Duracell особого смысла нет. По моим наблюдениям у солевых батареек напряжение в процессе разряда более стабильно, а срок их службы практически не отличается от более крутых. По крайней мере такое у меня сложилось впечатление, специальных исследований я, разумеется, не проводил.
Схему в формате sPlan, плату в Sprint Layout, прошивку контроллера, проект в CodeVision AVR V 2.05.0 с исходным текстом программы на Си вы можете загрузить по ссылкам в конце странички. Вот, наверное, и все. Приятного время провождения!
Источник
Бесполезная роботизированная коробка URoboBox

Многие из вас наверняка знают и видели гаджет под названием «Бесполезная коробка».
Но коробочка эта, вовсе не бесполезная, игра с ней дает немало положительных эмоций.
Решив позабавить своих детей, друзей и знакомых, я сделал URoboBox.
Это моя версия легендарной коробки.
Наткнулся в сети на такую штуку:
И еще вариант продвинутый вариант от LEGO:
В интернете также нашел инструкцию как собрать самостоятельно URoboBox – бесполезную роботизированную коробку.

URoboBox – Useless Robotic Box (Бесполезная Роботизированная Коробка).
Коробочка получилась простая, с минимальной начинкой доступной каждому. Для тех, кто хочет сделать такую коробку, прилагаю подробную инструкцию по сборке и все необходимые файлы. Для начала давайте посмотрим что получилось.
URoboBox в действии:
URoboBox может работать в двух режимах, случайный выбор движений и по порядку.
Коробочка имеет 7 движений для отключения тумблера, можно добавлять свои движения.
Если рычаг по каким-то причинам не может выключить тумблер, то после трех попыток коробочка переходит в режим ожидания.
Работа продолжится после отключение тумблера вручную.
Далее идет часть для тех кто желает собрать такую коробочку самостоятельно.
Работа URoboBox изнутри:
Корпус и рычаг вырезаны лазером из фанеры толщиной 4 мм.
Вы можете использовать любой другой материал, например, пластик, оргстекло.
Но толщина материала не должна превышать 4 мм, в противном случае, вам придется изменить чертежи.
Чертежи нарисованы в программе CorelDRAW X6.
Следуйте инструкции и у вас всё получится.
ВНИМАНИЕ: Вовремя сборки внимательно смотрите на фотографии и располагайте детали именно так, как они расположены на фото.
Необходимые компоненты:
- Плата Arduino. Я использую Arduino Mega, вы можете использовать любую другую.
- Тумблер с двумя положениями. Диаметр втулки с резьбой не должен превышать 6 мм.
- Серво. Я использую TowerPro g9. Если вы будете использовать другие серво, вам придется изменить чертежи крепления серво.
- Элементы питания.
- Супер клей. Маленькие тюбики, желательно гель.
- Шесть маленьких саморезов диаметром до 2.5 мм.
- Сверло 2 мм, 1 мм. Дрель или шуруповерт.
Инструкция по сборке:
Крепление для Arduino.
- Возьмите необходимые детали. Расположите их точно также как на фото (рис. 1).
- Переверните боковую стенку, поставьте детали крепления (гантельки) в прямоугольные отверстия (рис. 2).
- Сделайте отметки с двух сторон у каждой «гантельки», примерно посередине, между прямоугольными отверстиями (рис. 2 и рис. 3).
- Поочередно, установите «гантельки» с обратной (внутренней стороны) и просверлите отверстия (сверло 2 мм) в местах указанных точками на рисунке (рис. 3). Сверлите таким образом, чтобы сверло вошло в стенку «гантельки» прямо по центру. Диаметр сверла зависит от диаметра самореза.
- Закрепите «гантельки» саморезами (рис. 4, рис. 5).
- Возьмите пластинку для крепления Arduino. Приложите к ней плату так, чтобы совпали отверстия для креплений. Отметьте где будет находиться гнездо USB и куда оно направлено (рис. 6).
- Нанесите клей на паз «гантелек» (рис. 7), приложите пластину крепления Ардуино к «гантелькам» и дождитесь пока она приклеится.







Вот что у вас должно получиться:
- Разложите детали так, как показано на фото (рис. 8). Синими стрелками указаны основные элементы деталей, убедитесь, что ваши детали лежат также.
- Склейте скотчем: дно, левый торец, заднюю стенку и правый торец (видео 2). Соблюдайте расположение деталей.
3. Нанесите клей на торцы пазов дна и передней стенки (рис. 9). Прижмите переднюю стенку и дождитесь высыхания клея. У вас должно получиться так (видео 3). - Склейте скотчем: дно, левый торец, переднюю стенку и правый торец. Нанесите клей на торцы пазов дна и задней стенки (рис. 10).
- Прижмите заднюю стенку соблюдая расположение деталей и дождитесь высыхания клея. Вот что у вас должно получиться (видео 4).
- Со стороны правого торца, намажьте клеем торцы пазов задней стенки, дна и передней стенки. Аккуратно вставьте правый торец в пазы и дождитесь засыхания клея.
- Левый торец приклеивать не нужно.



Вот что должно получится:
Левая верхняя крышка:
- Возьмите корпус, левую крышку и 2 крючка (рис. 11).
- Приклейте крючки. Крючок в корпусе должен быть направлен прорезью в сторону левого торца коробки. Крючок на крышке должен быть направлен прорезью в сторону правого торца (рис. 12), (рис. 13).
- Возьмите канцелярскую скрепку, распрямите её и откусите кусачками два куска по 3 см. Загните оба отрезка как показано на рисунке (рис. 14).
- Уберите стенку левого торца, приложите правую верхнюю крышка как показано на рисунке (рис. 13) и просверлите отверстие (сверло 1 мм) в указанных на картинке местах (рис. 15). Сверло должно пройти сквозь боковые стенки и в середину торца верхней крышки.
- Вставьте в просверленные отверстия скобы из канцелярской скрепки (рис. 16).
- Загните каждую скобу так, чтобы «свободный» конец был направлен внутрь корпуса (рис. 17).
- Возьмите резинку для денег, сложите её в двое, закрутите на нужное число оборотов и наденьте на крючки (рис. 18).








Вот что у вас должно получиться:
Крепление серво, рычага, тумблер, завершение сборки:
- Возьмите крепление для серво и сам сервопривод (рис. 19).
- Вставьте серво в прямоугольное отверстие, при этом вал серво должен быть ближе к верхнему краю крепления. Нижняя часть крепления обозначена отверстием (рис. 20, рис. 21). Закрепите серво шурупами или винтиками M2 (пример на фото), предварительно просверлив отверстия (сверло 2 мм).
- Возьмите две части рычага (рис. 22), склейте их или соедините винтиками (пример на фото). Прикрутите качалку от серво точно также, как на фото (рис. 23).
- Поставьте серво в положение 0 градусов и закрепите рычаг на серво. Прямая часть рычага должна быть направлена вниз (рис. 24).
- Возьмите тумблер, провода штекера и сопротивление 10 кОм. Припаяйте провода и сопротивление как на картинке (рис. 25).
- Закрепите тумблер в правой верхней крышке как на картинке (рис. 26).
- Если у вас не Arduino Mega, тогда изготовьте вот такой провод (рис. 27).
- Подключите все компоненты к ардуино, смотрите схему (рис. 28, рис. 29, рис. 30).
- Закрепите Ардуино. Установите крепление с серво таким образом, чтобы вал серво был направлен в сторону задней стенки. Блок с батареями можно разместить на стенке левого торца (рис. 31, рис. 32).
- Закрепите верхнюю правую крышку и левый торец при помощи шурупов. Предварительно, под шурупы просверлите отверстия (сверло 2 мм) (рис. 33).















Вот что у вас должно получиться:
Откройте код для URoboBox. В самом начале кода, вы увидите раздел настроек.
- Укажите пины на которых подключены серво (пин 3) и тумблер (пин 2).
- Укажите минимальное положение рычага, по умолчанию 10. Максимальное положение рычага, в диапазоне от 90 до 110. Укажите такой градус, при котором в максимальном положении рычаг будет выключать тумблер.
- Укажите пин для светодиода подсветки.
- Выберите режим работы URoboBox, 1 – Выбор движений в случайном порядке, 2 – Движения идут по порядку.
- Общее число движений. Измените это число, если вы добавляли свои движения, укажите общее число движений.
- Настройте движение Shake, читайте описание в коде.
Код URoboBox для Arduino (СКАЧАТЬ)
Архив с файлом чертежей URoboBox для лазерной резки. Файл создан в программе CorelDRAW X6. (СКАЧАТЬ)
Робот-собака своими руками:
Источник