- Базовая схема для экспериментов с BLDC-моторами (на ATtiny2313)
- Как сделать простейший драйвер для двигателя старого HDD
- Схемные особенности
- Изготовление устройства
- Смотрите видео
- БЕСКОЛЛЕКТОРНЫЕ ДВИГАТЕЛИ BLDC
- Управление однофазными двигателями BLDC
- Управление двухфазными двигателями BLDC
- Управление 3-фазными двигателями BLDC
Базовая схема для экспериментов с BLDC-моторами (на ATtiny2313)

Представленная ниже схема является основой для экспериментов с bldc-моторами. Для тех, кто не в курсе, BLDC — это одна из разновидностей синхронных моторов, которая используется, например, в винчестерах, сидирумах, дисководах и т.п. (типа таких, как на картинке справа).
Теорию работы синхронных движков в общем виде можно почитать здесь, чуть конкретнее про BLDC — вот здесь.
Схема позволяет организовать необходимое для питания BLDC-моторов трёхфазное напряжение из обычного однофазного (с помощью ШИМ-модуляции).
Никаких специальных возможностей управления работой мотора (по датчикам Холла или по обратной ЭДС обмоток) в этой схеме не предусмотрено. Про различные варианты такого управления мы поговорим позже, а здесь я постараюсь подробно описать исходя из каких соображений и как рассчитываются элементы именно базовой схемы.
Как видите, нам понадобятся: 1 контроллер ATtiny2313, 3 микрухи спаренных полевиков FDS4542 (N- и P-channel в одном восьминогом корпусе), 6 биполярных транзисторов (я использовал FMMT2222 — маленькие биполярнички в корпусах SOT23 c маркировкой 1P), 3 диода (я взял LL4148) и некоторое количество всяких резисторов и кондёров. (их номиналы будут указаны ниже).
Суть схемы довольно простая — микроконтроллер управляет тремя абсолютно аналогичными силовыми каналами (поэтому на схеме показан только один), каждый из которых имеет на выходе комплиментарную пару мощных полевиков, образующую полумост с независимым управлением плечами.
То есть каждое из плеч можно включать и выключать независимо от другого, что даёт возможность получить на выходе полумоста три разных состояния: Hi — выход полумоста подключен к питанию (верхний полевик открыт, нижний — закрыт), Lo — выход полумоста подключен к общему проводу (верхний полевик закрыт, нижний — открыт) и Z — выход полумоста отключен и от питания, и общего провода (оба полевика закрыты).
В принципе, можно получить ещё и четвёртое состояние — когда оба полевика открыты, но в этом случае получится КЗ и один из полевиков просто сгорит. Поэтому такое состояние мы будем считать запрещённым и с ним нам как раз придётся всеми способами бороться.
В схеме предусмотрено отдельное питание для схемы управления (+5В) и для силовой части (+12В), поэтому для верхнего плеча пришлось делать развязку на транзисторах T1, T2. Два транзистора были использованы для того, чтобы умощнить эту развязку и сделать её характеристику симметричной, чтобы она могла не только быстро заряжать, но и разряжать затвор верхнего полевика (то есть это ещё и драйвер).
Нижний полевик управляется без всякого драйвера, напрямую от ноги микроконтроллера.
Резисторы R7, R8 — это необязательные подтяжки, назначение которых — предотвратить самопроизвольные открытия полевиков в тот момент, когда ноги микроконтроллера ещё не настроены на выход и находятся в Z-состоянии (при старте). Соответственно, номиналы этих резисторов не очень важны, они просто должны быть намного больше номиналов резисторов R5 и R6, чтобы не мешать нормальной работе схемы после запуска контроллера. Более того, поскольку нам главное, чтобы полевики оба сразу не открылись (если один откроется — шут с ним), можно оставить только R8. Я так и сделал, — взял номинал резистора R8 равным 10 кОм, а резистор R7 вообще выкинул.
Стоит отметить, что помимо функции подтяжки, R7 может выполнять ещё и функцию борьбы с наводками на линию управления транзистором T2. Ток в этой линии очевидно будет гораздо меньше, чем через R5 и в случае, если такие наводки всё же будут, резистор R7 придётся вернуть (это если вы свою разводку платы будете делать).
Ну что, дальше давайте считать. Исходить будем из двух предпосылок: 1) полевиками нужно рулить максимально быстро, но без фанатизма; 2) высшая математика — удовольствие на любителя (особенно когда есть осциллограф и можно всё проверить на практике). В связи с этими, особой точностью и правильностью я увлекаться не буду, но, по крайней мере, рассчёты позволят на что-то ориентироваться.
Начнём с нижнего полевика (N-канальник). Для максимально быстрого управления этим полевиком нам нужно выжать с ноги микроконтроллера максимальный ток и в то же время эту ногу не поджарить.
Пиковый ток на ногу в документации на ATtiny2313 не указан, поэтому будем исходить из значений, указанных в Absolute maximum ratings — 40 мА. При этом максимальный ток у нас будет протекать в самом начале заряда, когда разность потенциалов на затворе и ножке микроконтроллера максимальна. Таким образом, получается R5=5В/40мА=125 Ом. Ближайшее большее значение стандартного номинала — 150 Ом, но мы возьмём 200 Ом, чтобы был небольшой запас. Максимальный ток при этом получится 5/200=25 мА.
Теперь давайте оценим время переключения нашего полевика с резистором 200 Ом в затворе. Оценить это время можно по формуле t=Qg/I, где Qg — total gate charge (берём из документации на FDS4542), I — ток драйвера (мы возьмём максимальный расчётный зарядный ток, чтобы точно не ошибиться в меньшую сторону). Получаем t=28 нК / 25 мА = 1,12 мкс.
Зачем нам нужно время переключения? Очень просто. Когда мы будем писать программу управления — мы должны будем учитывать, что полевики закрываются не мгновенно и вводить задержки между закрытием полевика в одном плече и открытием полевика в другом плече, во избежание возникновения сквозных токов (когда полевики в обоих плечах приоткрыты).
Переходим к P-канальному полевику. Тут ситуация попроще и ногу контроллера нам нагружать не нужно, зато нужно не спалить биполярные транзисторы и диод.
Резисторы R1 и R3 в обвязке p-канальника — это просто высокоомные подтяжки и их номиналы не должны нас особо сильно волновать, поэтому я для начала взял их по 10 кОм (чтобы токи через них можно было не учитывать) и про них забыл.
Затворные токи здесь определяются резисторами R2 и R4, а сама обвязка работает следующим образом: при открытии транзистора T2 потенциал базы транзистора T1 падает ниже потенциала его эмиттера, T1 закрывается, а затвор полевика разряжается через диод и резистор R4; при закрытии транзистора T2 потенциал базы транзистора T1 растёт быстрее, чем на его эмиттере, что приводит к открытию T1 и резкому заряду затвора через R2.
Сначала разберёмся с зарядом. По документации ток через FMMT2222 может быть до 600 мА, а для LL4148 — до 450 мА импульсный и до 150 постоянный, поэтому ориентироваться будем на диод и возьмём для расчётов, скажем 150 мА (чтобы ничего сильно не грелось). Исходя из этого, получим сопротивление резистора R4 = (12-0,5)В/150мА = 76,6 Ом. Далее аналогично, — возьмём ближайший стандартный номинал больше расчётного — 100 Ом. Пересчитываем обратно в ток, получаем I = 115 мА. Ну что ж, пусть будет так. При этом время заряда можно оценить на уровне t = 36 нК / 115 мА = 313 нс.
Чтобы сильно не заморачиваться, возьмём R2 такого же номинала, как и R4, и будем считать, что время закрытия будет примерно такое же, как и время открытия.
Теперь проверим, насколько правильно мы выбрали R1. Чтобы транзистор T1 нормально открывался, ток базы должен быть не более чем в h21 раз меньше тока коллектора. Ток коллектора у нас 100 мА, h21 (из доки) не менее 35, значит ток базы нам нужен не менее 2,86 мА. А он у нас получается 12В/10кОм = 1,2 мА. Ну, тогда возьмём R1 = 3,3 кОм. В этом случае ток базы = 12/3,3 = 3,6 мА. Так и оставим.
Тот же расчёт проделаем для транзистора T2. Ток коллектора у него такой же, как и у T1, значит ток базы тоже должен быть не менее 2,86 мА. Значит R6 должен иметь номинал менее 5/2,86=1,75 кОм. Возьмём с запасом резистор на 1 кОм.
В итоге получилось: R1=3,3 кОм, R2=R4=100 Ом, R3=10 кОм, R5=200 Ом, R6=1 кОм, R7 мы выкинули, R8=10 кОм. При этом время переключения нижнего полевика мы ожидаем на уровне 1,12 мкс, а верхнего — на уровне 313 нс.
Что у нас осталось? Во-первых, конденсаторы. С1=С2=20 пФ, С3=100 мкФ, С4=0,1 мкФ. При проектировании платы C3,C4 нужно расположить как можно ближе к силовым ногам ключей. Во-вторых, на схеме не полностью показана обвязка микроконтроллера. Нужно подтянуть ногу MCLR к питанию через резистор 1 — 10 кОм, а так же поставить конденсатор 0,1 мкФ между питанием и общим проводом поближе к ножкам контроллера.
Что ж, — собираем и тестим.

Для снятия осциллограмм была написана тестовая программа, в которой транзисторы специально переключались с интервалами гораздо больше расчётных (на случай, если расчёты окажутся слишком кривыми).
Как видите, наши рассчёты дали примерно адекватные результаты, по крайней мере корректировать ничего не нужно.
Простейшая программка для контроллера (пуск / стоп / реверс / изменение питающего напряжения и частоты вращения)
Небольшое видео, демонстрирующее работу устройства
Источник
Как сделать простейший драйвер для двигателя старого HDD
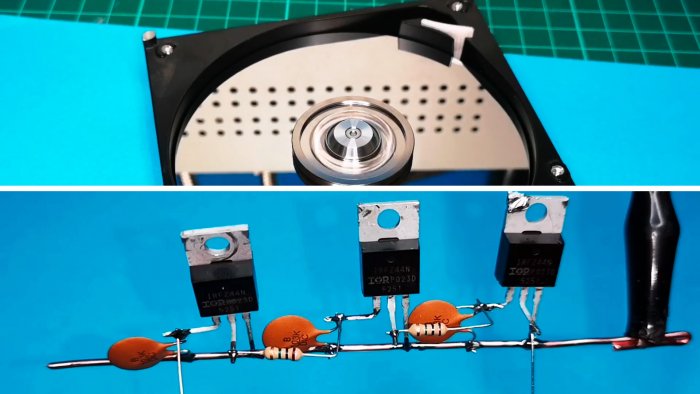
Устройство представляет собой электронный коммутатор и предназначено для работы с маломощными бесколлекторными (иначе бесщеточными) электродвигателями при условии соединения их обмоток звездой. Типичный пример таких агрегатов — привод дисковода классических винчестерских дисков персональных компьютеров.
Отличается схемной простотой и собирается на недефицитных деталях, которые хорошо представлены в интернет-торговле.
Схемные особенности
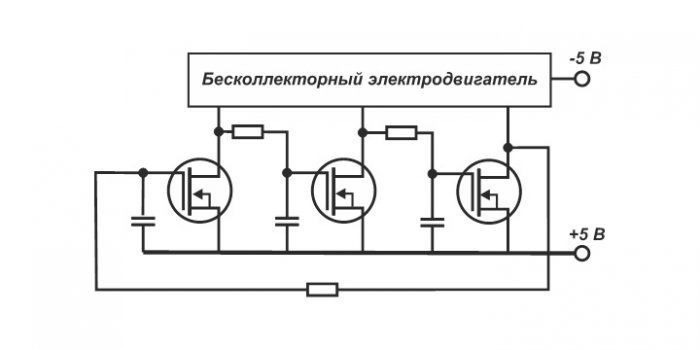
Устройство выполнено по схеме 3-фазного мультивибратора на полевых транзисторах с изолированным затвором, отдельные однотранзисторные каскады которого имеют идентичную структуру и соединены в кольцо. Каждый предыдущий каскад такого кольца управляет функционированием транзистора последующего. Стоки транзисторов соединены с обмотками двигателя напрямую.
Время нахождения транзисторов схемы в активном состоянии определяется последовательной RC-цепочкой, напряжение со средней точки которой подается на затвор.
Принципиальная схема устройства представлена на рисунке.
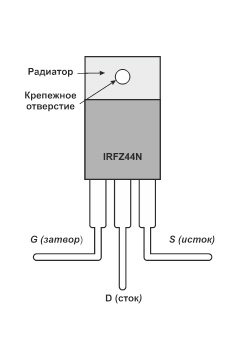
Транзисторы снабжены пластинчатым радиатором, который имеет прямую гальваническую связь со стоком. С учетом невысокой мощности управляемого бесколлекторного электродвигателя необходимость фиксации радиатора на корпусе с низким тепловым сопротивлением отсутствует. Цоколевка и рекомендуемое при сборке направление изгиба выводов представлены на рисунке.
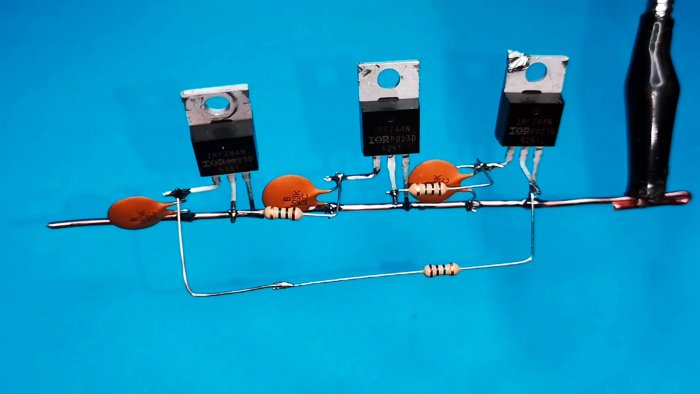
Изготовление устройства
Схема устройства достаточно проста и не требует обязательного применения монтажной платы. С учетом ее рядной структуры в качестве силового несущего элемента может быть использована проволочная шина диаметром 1 – 2 мм, которая соединяется с плюсом источника питания. Общий вывод обмоток подключается на минус источника питания.
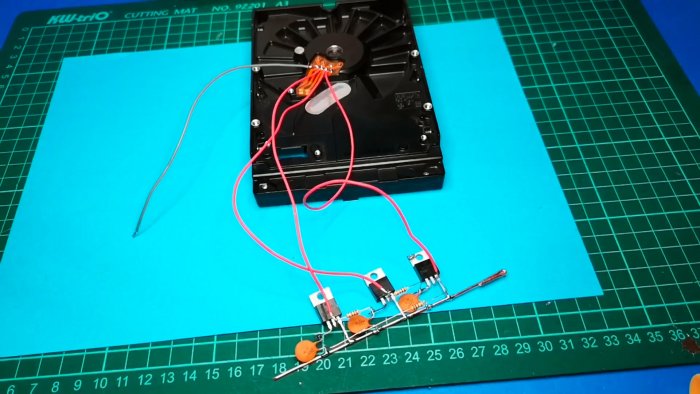
Подключается к трехфазному двигателю жесткого диска с общим проводом.

При сборке необходимо контролировать отсутствие коротких замыканий между отдельными неизолированными соединениями, при необходимости применяют кембрики.
Устройство при отсутствии ошибок в схеме начинает функционировать немедленно после подачи постоянного напряжения. Частоту вращения ротора двигателя можно менять заменой конденсаторов или резисторов, причем все устанавливаемые пассивные компоненты должны иметь одинаковый номинал.
Смотрите видео
Источник
БЕСКОЛЛЕКТОРНЫЕ ДВИГАТЕЛИ BLDC
Бесколлекторные двигатели постоянного тока (BLDC — Brushless DC electric motor) часто используется в мотор-колесе электросамокатов и электровелосипедов. Его первые версии появились в 1960-х годах. Двигатели BLDC намного эффективнее и имеют гораздо больший крутящий момент.

Размещение постоянного магнита в роторе (внутренняя конфигурация) и управление окружающими катушками через транзисторы, позволило устранить самый важный недостаток щеточных (коллекторных) двигателей постоянного тока, которым являются сами щетки.
В альтернативной конфигурации (внешний ход) катушки якоря могут образовывать твердый сердечник, вокруг которого вращается ротор с постоянным магнитом, приводящий в движение вал двигателя. В обоих случаях катушки неподвижны.
Двигатели BLDC считаются двигателями с электронной коммутацией (ECM) в отличие от щеточных двигателей с механической коммутацией.

Общий принцип управления двигателем BLDC
Для двигателей BLDC требуются современные электронные контроллеры, которые могут определять положение ротора. Для этой цели можно использовать датчик Холла, реагирующий на положение каждой из катушек якоря при работающем двигателе. Скорость двигателя BLDC больше не может регулироваться напряжением, как в щеточных двигателях, а только путем изменения частоты переключения. Эти двигатели питаются от сигнала ШИМ, как показано на рисунке.
Двигатели BLDC делятся на 1-фазные, 2-фазные и 3-фазные, но принцип работы является общим для всех типов. Вместо механического коммутатора, изменяющего направление магнитного поля катушек ротора, используются транзисторы, которые непрерывно изменяют фазу напряжения подаваемого на катушку статора, что заставляет ротор непрерывно вращаться.
Однофазные бесколлекторные (бесщеточные) двигатели используются в устройствах с низким энергопотреблением, в то время как двухфазные чаще в устройствах средней мощности. Типичные области применения 3-фазных двигателей — устройства чтения компакт-дисков.
Управление однофазными двигателями BLDC
Однофазные двигатели BLDC имеют две параллельные обмотки якоря, управляемые напряжением ШИМ через мост H. Выходной сигнал одного датчика Холла постоянно меняет полярность тока, протекающего через обмотку якоря, таким образом поддерживая непрерывное вращение ротора. Однофазные двигатели BLDC очень просты в управлении. Для их работы достаточно одной интегральной микросхемы, например LB11970RV (однофазный двухполупериодный драйвер).

Принцип управления однофазным двигателем BLDC
Управление двухфазными двигателями BLDC

Двухфазные двигатели немного сложнее в управлении. Якорь состоит из 4 катушек, а магнитное поле создается 4 парами постоянных магнитов. Катушки якоря сгруппированы попарно, поэтому двухфазные двигатели имеют больший крутящий момент, чем однофазные.
Двухфазные двигатели обычно используются в некритических низкоуровневых устройствах, таких как большие вентиляторы, поэтому там не требуются сложные контроллеры. В результате двухфазные двигатели мощнее и дешевле. Драйверы, такие как например LB1668M, могут использоваться для их управления.
Управление 3-фазными двигателями BLDC
Трехфазные двигатели BLDC имеют 3 катушки якоря, соответствующие 6 состояниям коммутации. В каждую из катушек обычно помещают датчики Холла, которые реагируют на прохождения над ними постоянных магнитов, которые являются элементами ротора. Принцип использования сигналов от датчиков Холла показан на рисунке.

Конструкция двигателя BLDC с датчиками Холла
Тут тоже сигналы от датчиков Холла определяют моменты переключения. Эти сигналы через соответствующую систему подключения включают транзисторы, которые напрямую управляют катушками двигателя. Конечно, переключение в трехфазных двигателях происходит в 3 раза быстрее, чем в однофазных. Это приводит к снижению вибрации (дёргания) и более точному контролю скорости. Примером трехфазного драйвера двигателя BLDC с датчиками Холла является микросхема LB1976.

Принцип управления мотором BLDC с использованием датчиков Холла
Двигателями также можно управлять без датчиков Холла, используя сигнал BEMF (Back EMF) от каждой катушки. Этот сигнал получается путем сравнения напряжения, индуцированного в каждой из трех катушек, с центральным напряжением (точка COM). Результат такой связи усиливается и передается в систему определения положения ротора.
Сигналы от трех катушек преобразуются в формы импульсов, сдвинутых друг относительно друга на 120 °. Некоторые контроллеры используют простые компараторы для определения фазы каждой обмотки, другие требуют использования внешних микроконтроллеров. Трехфазный интегрированный бессенсорный контроллер LB11983 включает в себя датчик положения ротора со схемами запуска, синхронизации, переключения, тепловой защиты и контроля насыщения и не требует внешнего микроконтроллера.
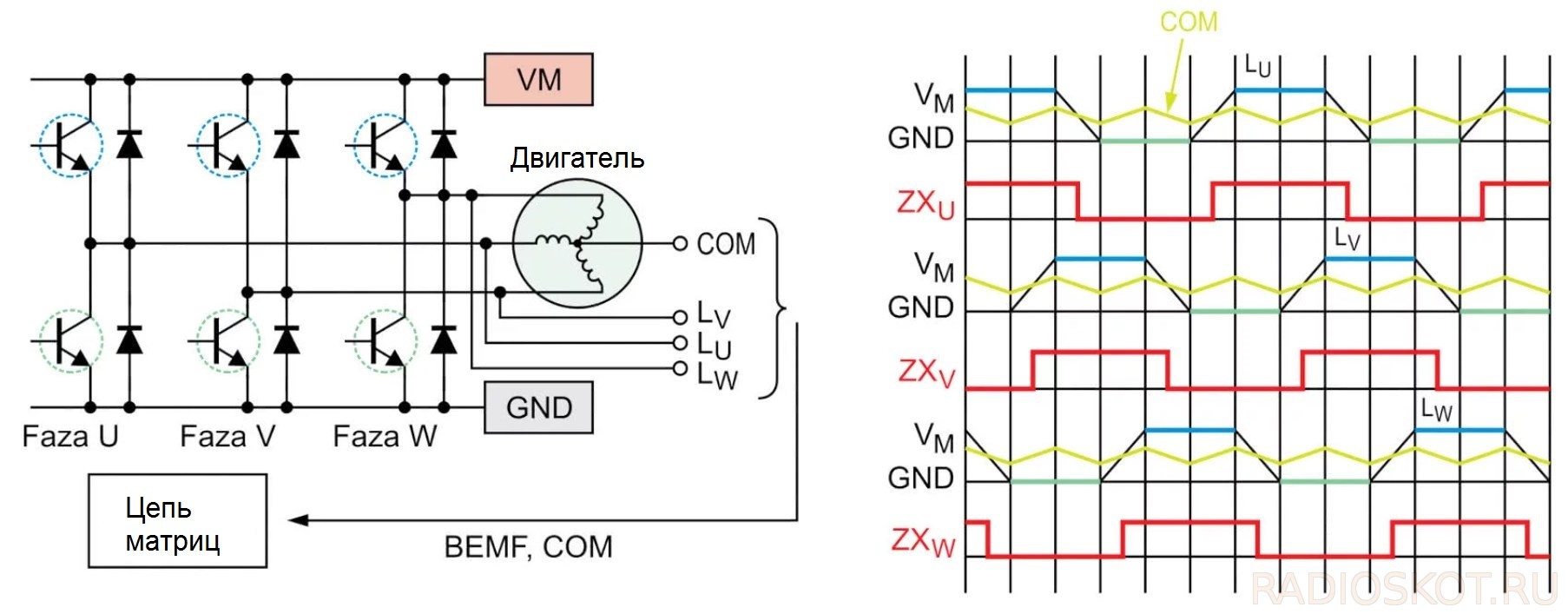
Принцип управления двигателем BLDC с помощью сигнала BEMF
Драйверы двигателей BLDC, использующие сигналы BEMF, имеют проблему с определением положения ротора во время запуска, потому что эти сигналы еще не генерируются. В этом случае двигатель запускается с неизвестного положения, то есть неизвестно положение статора относительно ротора. Это положение необходимо быстро распознать во время работы, потому что включение неправильной фазы может изменить направление вращения двигателя и даже сделать невозможной работу.
Источник