- Бесколлекторные двигатели постоянного тока. Устройство бесколлекторного двигателя.
- Общее устройство (Inrunner, Outrunner)
- Магниты и полюса
- Обмотки и зубья
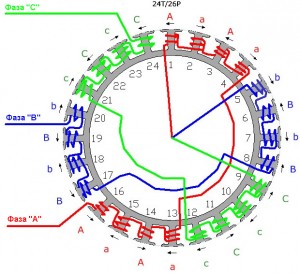
- Варианты распределения обмоток фаз по зубьям статора
- Обороты электрические и реальные
- Датчики положения
- Основные характеристики двигателя
- Звезда и Треугольник
- БЕСКОЛЛЕКТОРНЫЕ ДВИГАТЕЛИ BLDC
- Управление однофазными двигателями BLDC
- Управление двухфазными двигателями BLDC
- Управление 3-фазными двигателями BLDC
Бесколлекторные двигатели постоянного тока. Устройство бесколлекторного двигателя.
Общее устройство (Inrunner, Outrunner)
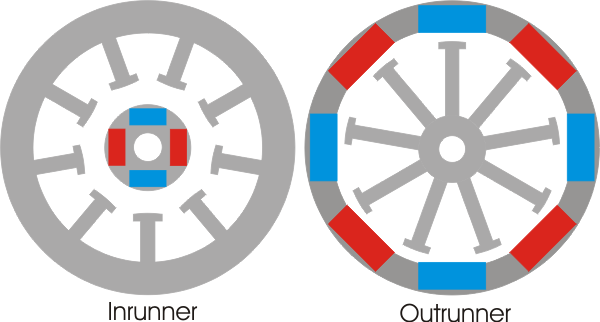
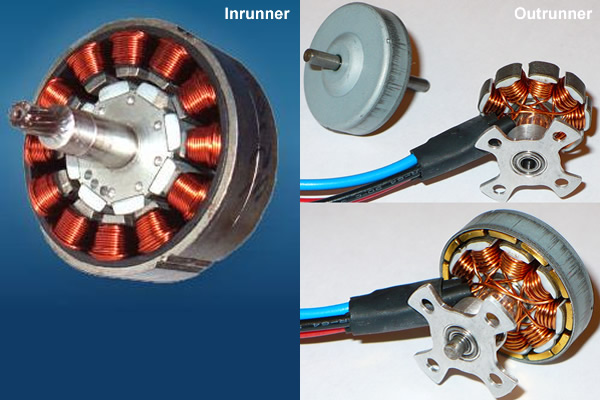
Схему Inrunner обычно применяют для высокооборотистых двигателей с небольшим количеством полюсов. Outrunner при необходимости получить высокомоментный двигатель со сравнительно небольшими оборотами. Конструктивно Inrunners проще из за того, что неподвижный статор может служить корпусом. К нему могут быть смонтированы крепежные приспособления. В случае Outrunners вращается вся внешняя часть. Крепеж двигателя осуществляется за неподвижную ось либо детали статора. В случае мотор-колеса крепление осуществляется за неподвижную ось статора, провода заводятся к статору через полую ось.

Магниты и полюса
Количество магнитов не всегда соответствует количеству полюсов. Несколько магнитов могут формировать один полюс:
В этом случае 8 магнитов формируют 4 полюса. Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу.
Магниты на роторе закрепляются с помощью специального клея. Реже встречаются конструкции с держателем магнитов. Материал ротора может быть магнитопроводящим (стальным), немагнитопроводящим (алюминиевые сплавы, пластики и т.п.), комбинированным.
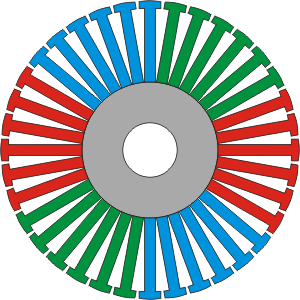
Обмотки и зубья

Количество зубьев статора должно делиться на количество фаз. т.е. для трехфазного бесколлекторного двигателя количество зубьев статора должно делиться на 3. Количество зубьев статора может быть как больше так и меньше количества полюсов на роторе. Например существуют моторы со схемами: 9 зубьев/12 магнитов; 51 зуб/46 магнитов.
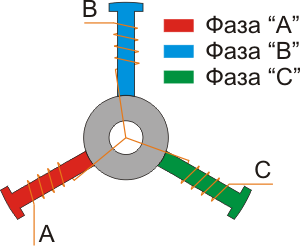
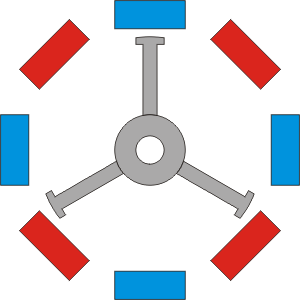
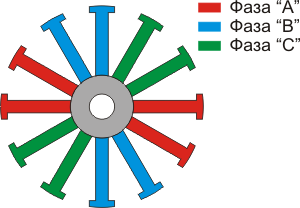
Двигателя с 3-х зубым статором применяют крайне редко. Поскольку в каждый момент времени работает только две фазы (при включении звездой), магнитные силы воздействуют на ротор не равномерно по всей окружности (см. рис.).
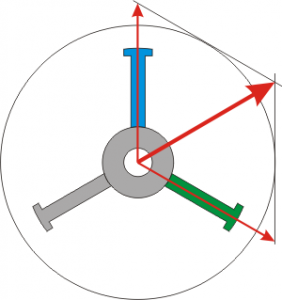
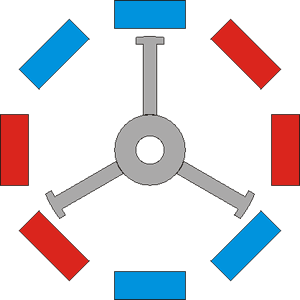
Силы, воздействующие на ротор, стараются его перекосить, что приводит к увеличению вибраций. Для устранения этого эффекта статор делают с большим количеством зубьев, а обмотку распределяют по зубьям всей окружности статора как можно равномернее.
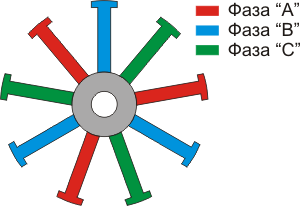
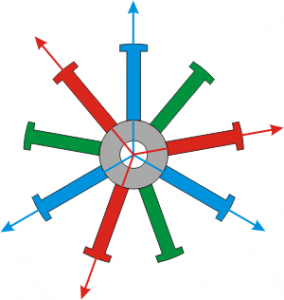
В этом случае магнитные силы, воздействующие на ротор, компенсируют друг друга. Дисбаланса не возникает.
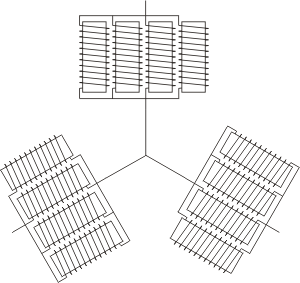
Варианты распределения обмоток фаз по зубьям статора
Вариант обмотки на 9 зубов
 Вариант обмотки на 12 зубов
Вариант обмотки на 12 зубов
В приведенных схемах число зубов выбрано таким образом, чтобы оно делилось не только на 3. Например, при 36 зубьях приходится 12 зубьев на одну фазу. 12 зубьев можно распределить так:
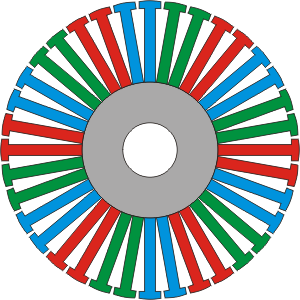 6 групп по 2 зуба
6 групп по 2 зуба
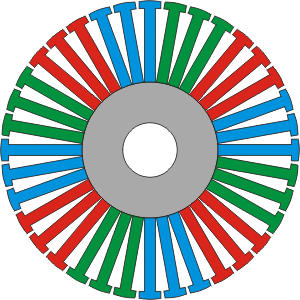 4 группы по 3 зуба
4 группы по 3 зуба
 3 группы по 4 зуба
3 группы по 4 зуба
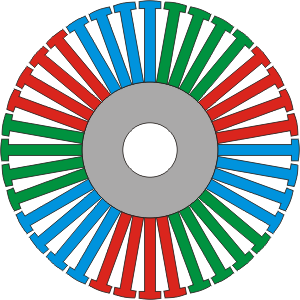
 2 группы по 6 зубьев
2 группы по 6 зубьев
Наиболее предпочтительна схема 6 групп по 2 зуба.
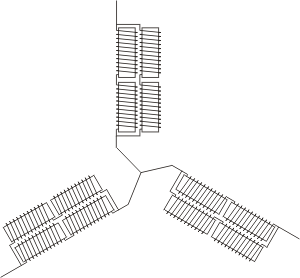
Существует двигатель с 51 зубом на статоре! 17 зубов на одну фазу. 17 — это простое число, оно нацело делится только на 1 и на само себя. Как же распределить обмотку по зубьям? Увы, но я не смог найти в литературе примеров и методик, которые помогли бы решить эту задачу. Оказалось, что обмотка распределялась следующим образом:
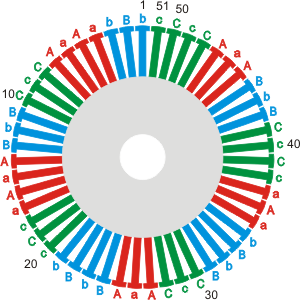
Рассмотрим реальную схему обмотки.
Обратите внимание, что обмотка имеет разные направления намотки на разных зубьях. Разные направления намотки обозначаются прописными и заглавными буквами. Детально о проектировании обмоток можно прочитать в литературе, предложенной в конце статьи.
Классическая обмотка выполняется одним проводом для одной фазы. Т.е. все обмотки на зубьях одной фазы соединены последовательно.
Обмотки зубьев могут соединяться и параллельно.
Так же могут быть комбинированные включения
Параллельное и комбинированное включение позволяет уменьшить индуктивность обмотки, что приводит к увеличению тока статора (следовательно и мощности) и скорости вращения двигателя.
Обороты электрические и реальные
Датчики положения
Имеется в виду «электрических» градусов. Т.е. для многополюсного двигателя физическое расположение датчиков может быть таким:

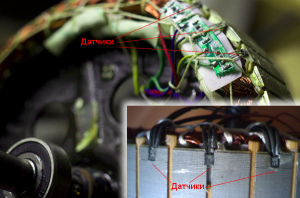
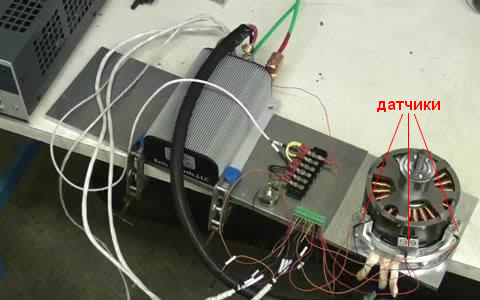
Иногда датчики располагают снаружи двигателя. Вот один из примеров расположения датчиков. На самом деле это был двигатель без датчиков. Таким простым способом его оснастили датчиками холла.
На некоторых двигателях датчики устанавливают на специальном устройстве, которое позволяет перемещать датчики в определенных пределах. С помощью такого устройства устанавливается угол опережения (timing). Однако, если двигатель требует реверса (вращения в обратную сторону) потребуется второй комплект датчиков, настроенных на обратный ход. Поскольку timing не имеет решающего значения при старте и низких оборотах, можно установить датчики в нулевую точку, а угол опережения корректировать программно, когда двигатель начнет вращаться.
Основные характеристики двигателя
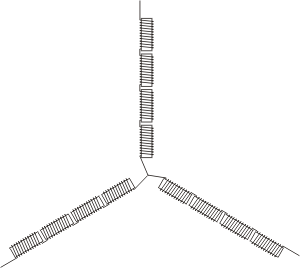
Звезда и Треугольник
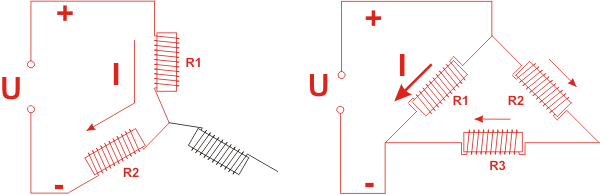
При включении звездой ток протекает через две обмотки. Результирующее сопротивление равно сумме сопротивлений двух обмоток R=R1+R2. Соответственно максимально возможный ток, протекаемый через обмотки I=U/(R1+R2). Потребляемая мощность P=U*I Предположим, что напряжение 10 В, а сопротивление обмотки 1 ОМ. Тогда ток I=10/(1+1)=5А. Потребляемая мощность P=10*5=50 Вт.
При включении треугольником ток протекает через все обмотки. Результирующее сопротивление обмоток R=(R1*(R2+R3))/(R1+R2+R3). Соответственно, максимально возможный ток, протекаемый через обмотки I=U/((R1*(R2+R3))/(R1+R2+R3)
При таком же напряжении и сопротивлении обмоток получаем ток I=10/((1*(1+1))/(1+1+1))=15А. Потребляемая мощность P=10*15=150 Вт.
При включении треугольником вырастают и обороты двигателя. Обмотки двигателя соединенные треугольником греются больше, чем при включении звездой.
Очевидно, что простым переключением обмотки с звезды в треугольник можно получить двигатель с совершенно другими характеристиками.
В высокомоментных двигателях с длительным режимом включения целесообразно применять звезду. В двигателях, работающих в кратковременном режиме, требующих более высоких оборотов, целесообразно применять треугольник.
Иногда в электротранспорте старт и разгон выполняется при включении обмоток звездой (так как это включение обеспечивает высокий момент на валу, но меньшие обороты), после разгона выполняется переключение в треугольник (обороты выше, момент меньше). Это позволяет увеличить диапазон оборотов двигателя, сохранив стартовые характеристики.
В следующей статье будет рассмотрен алгоритм управления бесколлекторными двигателями.
Источник
БЕСКОЛЛЕКТОРНЫЕ ДВИГАТЕЛИ BLDC
Бесколлекторные двигатели постоянного тока (BLDC — Brushless DC electric motor) часто используется в мотор-колесе электросамокатов и электровелосипедов. Его первые версии появились в 1960-х годах. Двигатели BLDC намного эффективнее и имеют гораздо больший крутящий момент.

Размещение постоянного магнита в роторе (внутренняя конфигурация) и управление окружающими катушками через транзисторы, позволило устранить самый важный недостаток щеточных (коллекторных) двигателей постоянного тока, которым являются сами щетки.
В альтернативной конфигурации (внешний ход) катушки якоря могут образовывать твердый сердечник, вокруг которого вращается ротор с постоянным магнитом, приводящий в движение вал двигателя. В обоих случаях катушки неподвижны.
Двигатели BLDC считаются двигателями с электронной коммутацией (ECM) в отличие от щеточных двигателей с механической коммутацией.

Общий принцип управления двигателем BLDC
Для двигателей BLDC требуются современные электронные контроллеры, которые могут определять положение ротора. Для этой цели можно использовать датчик Холла, реагирующий на положение каждой из катушек якоря при работающем двигателе. Скорость двигателя BLDC больше не может регулироваться напряжением, как в щеточных двигателях, а только путем изменения частоты переключения. Эти двигатели питаются от сигнала ШИМ, как показано на рисунке.
Двигатели BLDC делятся на 1-фазные, 2-фазные и 3-фазные, но принцип работы является общим для всех типов. Вместо механического коммутатора, изменяющего направление магнитного поля катушек ротора, используются транзисторы, которые непрерывно изменяют фазу напряжения подаваемого на катушку статора, что заставляет ротор непрерывно вращаться.
Однофазные бесколлекторные (бесщеточные) двигатели используются в устройствах с низким энергопотреблением, в то время как двухфазные чаще в устройствах средней мощности. Типичные области применения 3-фазных двигателей — устройства чтения компакт-дисков.
Управление однофазными двигателями BLDC
Однофазные двигатели BLDC имеют две параллельные обмотки якоря, управляемые напряжением ШИМ через мост H. Выходной сигнал одного датчика Холла постоянно меняет полярность тока, протекающего через обмотку якоря, таким образом поддерживая непрерывное вращение ротора. Однофазные двигатели BLDC очень просты в управлении. Для их работы достаточно одной интегральной микросхемы, например LB11970RV (однофазный двухполупериодный драйвер).

Принцип управления однофазным двигателем BLDC
Управление двухфазными двигателями BLDC

Двухфазные двигатели немного сложнее в управлении. Якорь состоит из 4 катушек, а магнитное поле создается 4 парами постоянных магнитов. Катушки якоря сгруппированы попарно, поэтому двухфазные двигатели имеют больший крутящий момент, чем однофазные.
Двухфазные двигатели обычно используются в некритических низкоуровневых устройствах, таких как большие вентиляторы, поэтому там не требуются сложные контроллеры. В результате двухфазные двигатели мощнее и дешевле. Драйверы, такие как например LB1668M, могут использоваться для их управления.
Управление 3-фазными двигателями BLDC
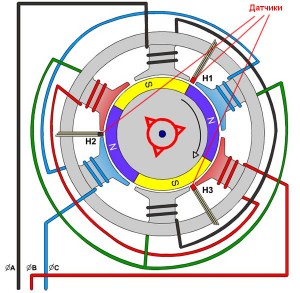
Трехфазные двигатели BLDC имеют 3 катушки якоря, соответствующие 6 состояниям коммутации. В каждую из катушек обычно помещают датчики Холла, которые реагируют на прохождения над ними постоянных магнитов, которые являются элементами ротора. Принцип использования сигналов от датчиков Холла показан на рисунке.

Конструкция двигателя BLDC с датчиками Холла
Тут тоже сигналы от датчиков Холла определяют моменты переключения. Эти сигналы через соответствующую систему подключения включают транзисторы, которые напрямую управляют катушками двигателя. Конечно, переключение в трехфазных двигателях происходит в 3 раза быстрее, чем в однофазных. Это приводит к снижению вибрации (дёргания) и более точному контролю скорости. Примером трехфазного драйвера двигателя BLDC с датчиками Холла является микросхема LB1976.

Принцип управления мотором BLDC с использованием датчиков Холла
Двигателями также можно управлять без датчиков Холла, используя сигнал BEMF (Back EMF) от каждой катушки. Этот сигнал получается путем сравнения напряжения, индуцированного в каждой из трех катушек, с центральным напряжением (точка COM). Результат такой связи усиливается и передается в систему определения положения ротора.
Сигналы от трех катушек преобразуются в формы импульсов, сдвинутых друг относительно друга на 120 °. Некоторые контроллеры используют простые компараторы для определения фазы каждой обмотки, другие требуют использования внешних микроконтроллеров. Трехфазный интегрированный бессенсорный контроллер LB11983 включает в себя датчик положения ротора со схемами запуска, синхронизации, переключения, тепловой защиты и контроля насыщения и не требует внешнего микроконтроллера.
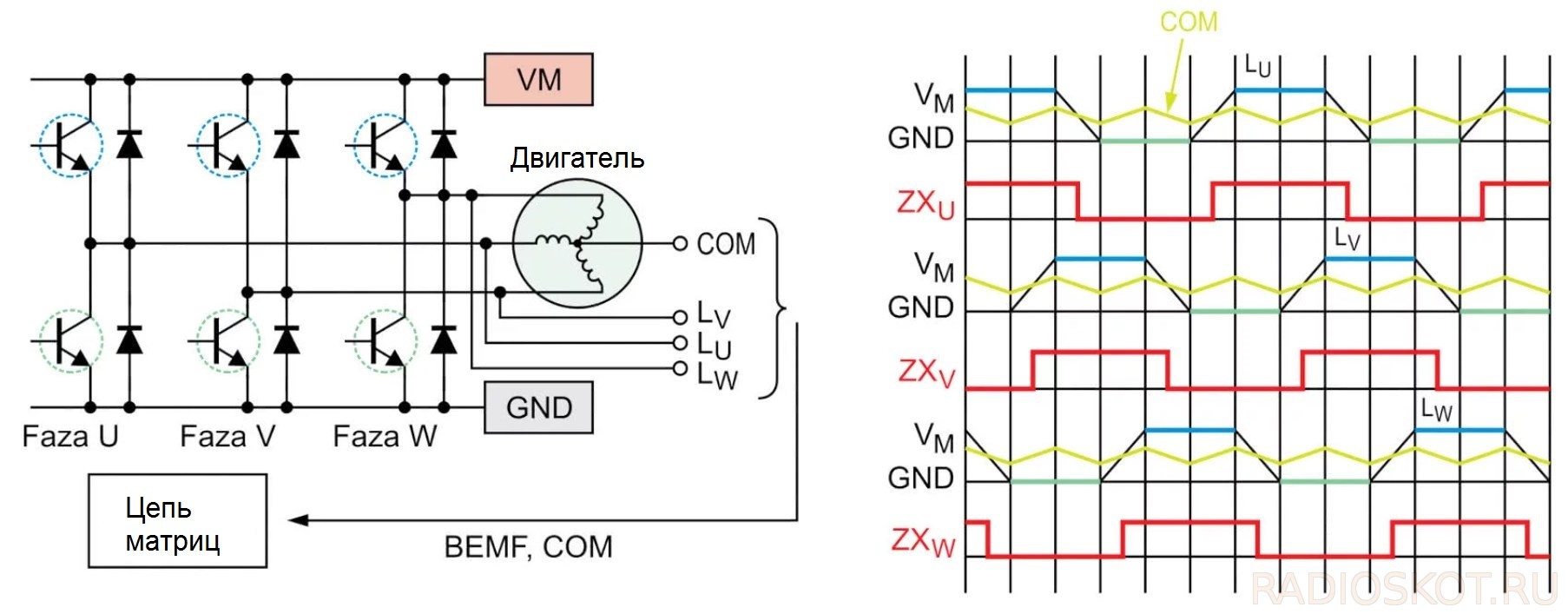
Принцип управления двигателем BLDC с помощью сигнала BEMF
Драйверы двигателей BLDC, использующие сигналы BEMF, имеют проблему с определением положения ротора во время запуска, потому что эти сигналы еще не генерируются. В этом случае двигатель запускается с неизвестного положения, то есть неизвестно положение статора относительно ротора. Это положение необходимо быстро распознать во время работы, потому что включение неправильной фазы может изменить направление вращения двигателя и даже сделать невозможной работу.
Источник