Как построить боевого робота класса Antweight
wikiHow работает по принципу вики, а это значит, что многие наши статьи написаны несколькими авторами. При создании этой статьи над ее редактированием и улучшением работали, в том числе анонимно, 14 человек(а).
Количество просмотров этой статьи: 11 209.
Хотели ли вы когда-нибудь построить боевого робота? Вы вероятно думали, что это слишком дорого и опасно. Тем не менее, большинство соревнований боевых роботов имеют весовую категорию 150 грамм, включая RobotWars. Этот класс в большинстве стран называется «Antweight» (англ. – муравьиный вес) и «FairyWeight» (англ. – вес как у феи) – в США. Они намного дешевле больших боевых роботов и не такие опасные. Поэтому они идеально подходят для новичков в деле боевых роботов. Эта статья расскажет вам как спроектировать и построить боевого робота класса Antweight.
ПРИМЕЧАНИЕ: Эта статья подразумевает, что вы уже читали и строили простого радиоуправляемого робота. Если нет, вернитесь исначаласделайте его. Следует отметить, что эта статья не является рекомендацией использования определенной части вашего робота. Это необходимо для поощрения творчества и разнообразия среди роботов.









- Если вы хотите, чтобы ваш робот мог бить, желательно присоединить сервопривод к сферическому «плечу», и иметь руку, установленную под углом 90 градусов, чтобы делать апперкоты.
- Ваш робот будет более оборонительным или нападающим? Так как вес ограничен, вы можете захотеть использовать большую его часть на оружие или броню. Постарайтесь сбалансировать эти характеристики на вашем первом роботе.
- Любого робота можно улучшить. Просто потому, что ваша первая модель робота не работает, не стоит её полностью выбрасывать. Возможно вам просто нужно заменить мотор. Даже если у вас полностью функционирующий робот, вы все ещё можете его улучшить. Посмотрите на моторы, которые больше подходят вашим целям, если новый мотор не используется в проекте, просто оставьте его и у вас будет возможность собрать другого робота. Постарайтесь улучшить некоторые части (обычно перед, зад и оружие) брони в алюминий, или даже титан, для большей «защиты от вертушек».
- Помните, что вы можете поместить вашего робота в куб по диагонали.
- Закажите запасные детали для вашего робота. Так как это боевой робот, ваши детали могут повредится в сражении. Если у вас есть запасные на руках, вы сможете быстрее заменить детали.
В правилах говорится, что робот должен поместится в куб 4X4X4 дюйма, тем не менее он может расширятся с помощью дистанционного управления. Вы можете извлечь из этого выгоду. К примеру, ваше переворачивающее оружие слишком выпирает. Постарайтесь разработать его так, чтобы flipper мог подняться прямо вверх и быть меньше четырех дюймов в высоту. Но когда flipper опускается (после того как куб поднят), длина станет больше четырех дюймов.
- После постройки своего первого робота и четкого понимания боевых роботов, постарайтесь построить ещё одного. Но, на этот раз, будьте уникальным. Постарайтесь сделать его не таким, как роботы у других людей в этой весовой категории. Если вы действительно амбициозны, вы можете попробовать сделать летающего робота! Летающие роботы допускаются правилами, но их редко строят.
- Если вы используете SketchUp, вы можете найти идеальные модели сервоприводов и других компонентов на Warehouse. Просто ищите название сервопривода (или компонента, который хотите) и смотрите, если что-то подойдет. Там есть не все, но то что вы найдете, обычно выглядит лучше и даст вам более аккуратную модель. Удостоверьтесь, что модель, которую вы нашли, того же размера, что и настоящая деталь
- Если вы опытны в механике и боевых роботах, вы можете попробовать построить шагающего робота. Если вы сделаете боевого робота, который ходит, вы получите дополнительный вес для работы.
Источник
Как сделать робота (боевую турель)

Кто занимается робототехникой, конечно, хочет сделать робота своими руками. Но далеко не у всех, особенно у начинающих, хватает знаний для создания робота самостоятельно. И сразу возникает вопрос: как сделать робота, если очень хочется?
Для создания робота, помимо идеи, понадобятся различные по сложности радиокомпоненты. Также не обойтись без шасси для будущего робота и различных механических частей. Конечно, всё будет зависеть от размаха вашего проекта. Но без механики вряд ли вам обойтись.
Возможно, кто-то предпочитает использовать готовый конструктор для создания различных роботов. К примеру, «Lego». В данном конструкторе имеется всё необходимое для создания роботов различной сложности, но такой конструктор не из дешёвых. Да и согласитесь, куда приятнее созерцать свое творение, если оно было изготовлено самостоятельно от «А» до «Я», от набросков на листе бумаги до полного его воплощения в задуманных масштабах.
Для таких творческих людей, не боящихся поработать своими руками совместно со своим ребенком сделать робота, а также для детских радиокружков была разработана модель «Турель». Конечно, это не робот, но на основе моего проекта можно создать различные увлекательные роботизированные устройства. Тем более, что всё выполнено из бюджетных материалов.
Сборка поворотного шасси
Поворотное шасси для турели выполняется из двухстороннего фольгированного текстолита, как и большинство комплектующих для данной самоделки. Данный материал очень лёгкий и простой в обработке и имеет достаточную прочность. При помощи ножниц по металлу можно вырезать любую подходящую деталь.
Круговое вращение орудия в данном проекте не требуется, так как нужен небольшой сектор обстрела. Соответственно, для данной задачи подошёл бюджетный сервопривод SG90.
Шасси должно удерживать на месте турель при выстреле и не дать ей перевернуться, так как при испытании данной модели отдача орудия от выстрела оказалась достаточно большой.
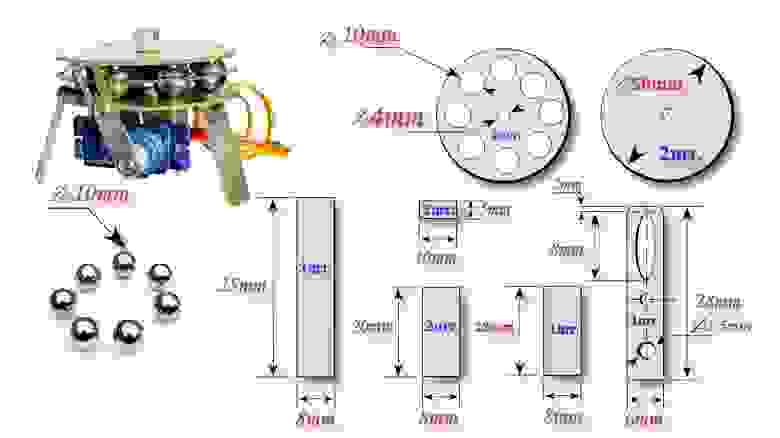
Для поворотного шасси я применил самодельный упорный подшипник. Таким образом, шасси получилось поворотным, и благодаря весу металлических шариков являлось достаточно устойчивым, хотя при выстреле турель всё-таки слегка перемещается. Пришлось даже уменьшить немного силу выстрела.
Сборка орудия или пушки
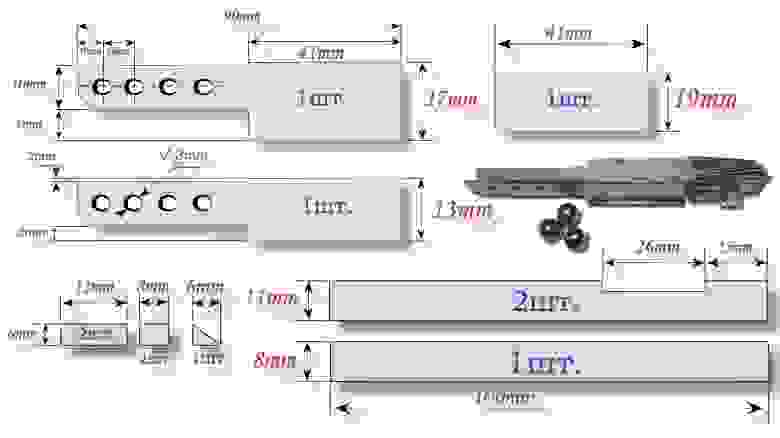
С пушкой для турели пришлось повозиться. Из многочисленных опробованных конструктивных вариантов я выбрал данный вариант (рис. 1). В таком исполнении в ствол легко можно было загрузить металлические шарики диаметром 8 мм, так как конструкция пушки была весьма крепкой. Чтобы шарик не катался по стволу и его положение было четко зафиксированным, в стволе были сделаны сквозные отверстия.
Установка орудия на поворотное шасси и механизм взвода и спуска орудия

Установив на поворотном шасси орудие, я начал процесс сборки взводящего механизма. Осуществить данную цель мне помог сервопривод SG90. Усилия сервопривода достаточно, чтобы натянуть пружины. Как только ударная часть оказывалась в позиции, срабатывала защёлка, которая и удерживала ствол во взведённом состоянии. В таком положении взводящий рычаг сервопривода, размещённый в нижней части ствола, просто мешал осуществить выстрел.
Для реализации выстрела я применил простой и надежный способ. Как только защёлка зафиксировала ствол (рис. 1), сервопривод должен возвращаться в исходное состояние. В определённый момент своего пути сервопривод нажимал на спусковой механизм и одновременно сбрасывал защёлку, удерживающую ударную часть. При этом производился выстрел.
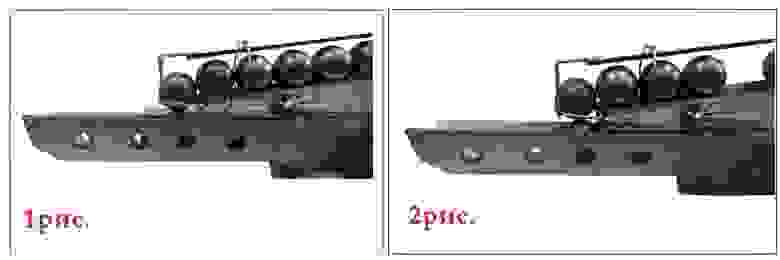
Магазин рассчитан на 12 металлических шариков, взятых из подшипника, хотя можно запросто стрелять крупными бусинками. Чтобы упростить подачу шариков в ствол, я расположил магазин под небольшим углом. Загрузка ствола шариками осуществлялась под собственным весом, они просто скатывались туда, куда нужно.Начальное положение ударника перекрывает подачу металлических шариков (рис. 1). Как только ударник уходит, верхний шарик падает.
Но возникла проблема: при падении металлический шар начинал катиться. Чтобы ее решить, я сделал боковые отверстия в стволе. Они удерживают положение шарика, не давая ему перемещаться (рис. 2).
Применяемая электроника


Для радиоуправления роботизированной турели я применил плату, разработанную ранее для проекта «Осадная катапульта»
Учитывая, что вряд ли кто-то будет повторять радиоджойстик, изготовленный мною, так как он достаточно сложен, представляю вариант значительно более простой в исполнении, хотя разводку на печатной плате оставил под радиомодуль.
Как вы видите из принципиальной схемы, джойстик достаточно простой и состоит из трех тактовых кнопок, подключенных к микроконтроллеру. Две тактовые кнопки осуществляют поворот турели вправо либо влево. Оставшаяся тактовая кнопка даёт команду на выстрел. Те, кто имеют определенные знания в программировании микроконтроллеров, могут написать свою версию программы для микроконтроллера.
К примеру, оснастив устройство датчиком расстояния, можно реализовать автоматический огонь, как только будет обнаружен объект на заданном расстоянии. Поскольку данную самоделку я разрабатывал как базовую модель для детского радиокружка, то соответственно комплектация и сложность изделия также могут меняться.
Источник
Боевые роботы своими руками — через интернет? Почему нет. -)
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах.
Отписаться от уведомлений вы всегда сможете в профиле автора.

Эта история началась почти год назад. Сидели мы как то с другом и подумали, «а что если сделать систему, для игры через интернет? То бишь, управления реальными роботами?»
Сказано – сделано… «робота» 🙂 закипела…
В процессе предварительного обсуждения была выбрана конструкция «а-ля танк»- то есть 2 колеса с отдельными двигателями, без рулевой системы вообще. Эта система дает роботу высокую маневренность и возможность развернуться на 180 градусов, стоя на месте. Кроме того, побочным следствие такого разворота –является возможность наносить удар по шайбе(если есть клюшка) – на этом месте, многие должны вспомнить игру «настольный хоккей»- где хоккеисты вращаются вокруг своей оси и таким образом – бьют по шайбе.

Однако, такое устройство ходовой части – вызвало большие проблемы в будущем. Почему: 2 отдельных двигателя никогда не будут вращаться с синхронной скоростью, если не имеют жесткой механической связи. Почему: разность изготовления на заводе, погрешности в посадке и диаметрах колес и т.д. и т.п.
Поэтому, единственный путь синхронизировать колеса (если не связывать их некой жесткой связью – типа общей оси) – то использовать программную синхронизацию.
Сначала взяли для этих целей акселерометр/гироскоп. Но это оказалась насколько простая, настолько и не неудачная идея: робот стал «терминатором» — который четко «прёт» вперед и его не может сбить с курса ничто-даже удары других роботов. А это плохо 🙂 Мы здесь не «скайнет» строим – и такие «терминаторы» не нужны. К слову, программная реализация сего действа весьма сложна и сможет разобраться и инсталлировать только программер. Мне повезло-я программер :-))))
Пришлось отказаться. Второй путь – установка «энкодеров»(дырчатых дисков) на колеса и датчиков, считывающих импульсы, когда «дырка» проходит мимо датчика. Таким образом, зная скорости прохождения «дырок» на каждом из колес, — можно много раз в секунду корректировать скорости вращения колес и делать их одинаковой. Это не делает робота «терминатором» — его вполне можно сбить с курса, ударом другого робота. Это просто синхронизирует скорости колес. То, что надо.
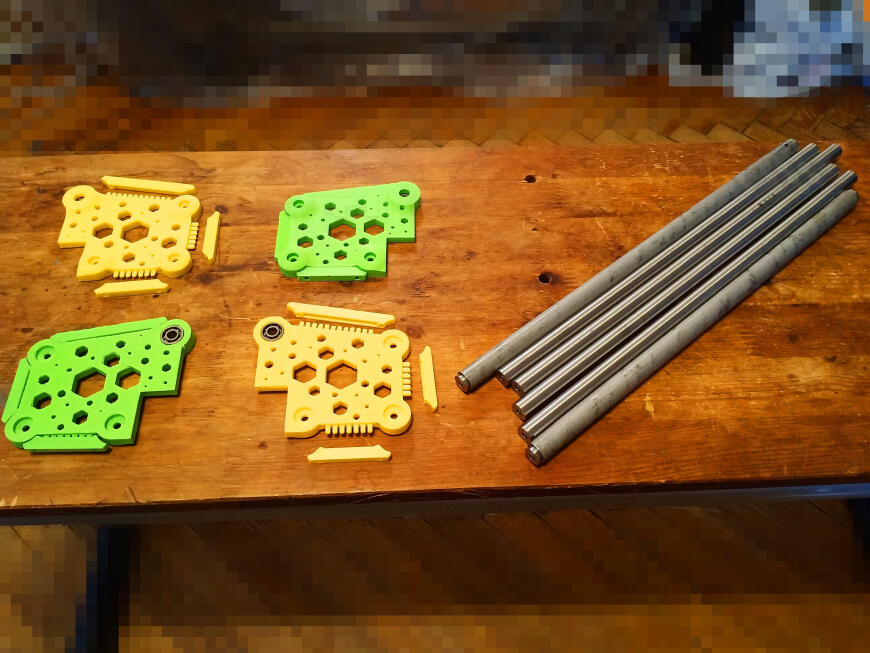
Сразу скажу, что это был весьма тернистый путь — как с точки зрения использующихся технических решений, так и физической сложности изготовления: одних только деталей для роботов — было отпечатано более 100 штук! Причем печать велась на открытом балконе,

Достаточно сказать, что одна только управляющая программа для заливки в роботов – представляет собой 15 вкладок в Arduino IDE до 300 с лишним строк каждая О_о

Были на этом пути и неудачи: была закуплена большая партия Ni-Mh аккумуляторов и зарядных устройств, для них. Но, как оказалось, они не справляются с такой энергоотдачей.
И, в итоге- они полетели в корзину(условно)…:-(
Пришлось перейти на литий-ионные элементы 18650.


Сейчас система представляет собой веб сайт, на который ведется трансляция с youtube. «Пилоты» роботов заходят на него и берут в управление свободного робота. И «let the battle-begin. » 🙂
Управление ведется «стрелками» с клавиатуры. Также, оно дублировано на другую конкурирующую схему (лично я- «фу фу, только стрелки» 🙂 — но пускай будет) – WASD.
Для создания стола – мы закупили школьную доску.

И установили на нее бортик из алюминиевой полосы. Это работа была бы невозможной, без станочного парка. Тут нам тоже повезло-у нас есть токарный станок по металлу и сверлильный тоже..
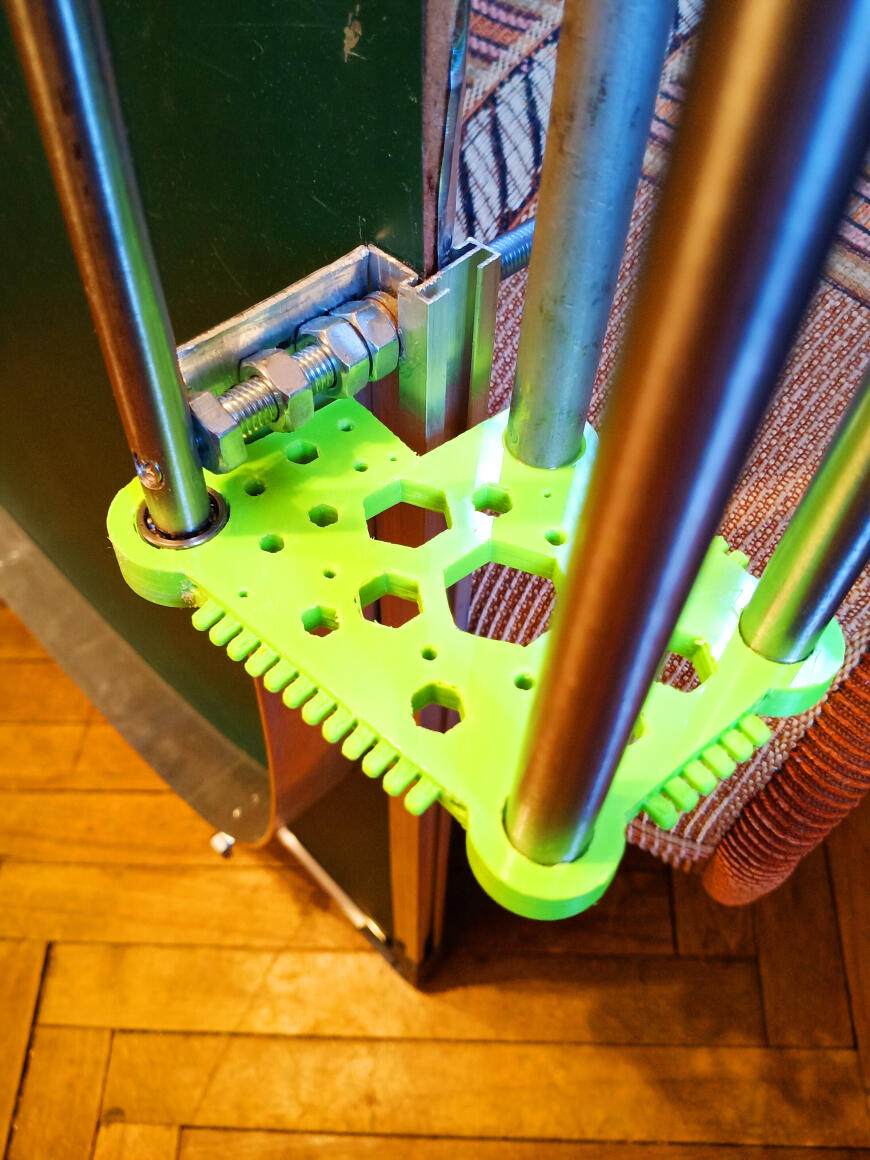
 Далее-дома валялась пару прутов из нержавеющей стали. Отпилили нужные куски из нее, выточили на концах оси под подшипники и установили их – как оси для ворот (ворота задумали как откидные, для того, чтобы доставать оттуда шайбы было проще).
Далее-дома валялась пару прутов из нержавеющей стали. Отпилили нужные куски из нее, выточили на концах оси под подшипники и установили их – как оси для ворот (ворота задумали как откидные, для того, чтобы доставать оттуда шайбы было проще).

 Далее — напечатали боковины ворот с плотной посадкой подшипников в них (подшипники завалялись у меня в количестве аж 50 штук от другого проекта).
Далее — напечатали боковины ворот с плотной посадкой подшипников в них (подшипники завалялись у меня в количестве аж 50 штук от другого проекта).
На боковинах можно видеть гребенки – натяжители сетки. Которые помогут нам натянуть сетку на ворота.
Далее – из того же нержавеющего прута и куска такой же нержавеющей трубы(ибо прут закончился нежданно-негаданно 🙂 ) – были выточены соединительные распорки для боковин.


В качестве сетки – случайно попался на глаза и был немедленно разодран :-)))))) — сетчатый мешок для стирки мелких вещей в стиральной машине. У него оказался весьма модный шестигранный рисунок сетки. Мы впали в восторг! :-)))
Однако, — рано радовались. Как оказалось, начался самый сложный этап для почти любого мужика- швейные работы! :-)))))) Как оказалось, это даже сложнее, чем программинг, 3d печать и токарные работы –вместе взятые! :-)))))))))

Вдоволь намучавшись – мы таки обшили сеткой ворота. Система — готова! Уииии. :-)))
В качестве шайбы – было взято решение, которое я подсмотрел давным давно-еще в начале 90-х, в журнале «Юный Техник».
Тогда я был моложе, трава зеленее — а руки у меня «кривее» 🙂
Они предлагали ее сделать из шайб для хоккея и больших шаров от подшипников. Это позволило бы играть в хоккей в крытом помещении на обычном полу.
Тогда -у меня ничего не вышло. Но, спустя примерно 30 лет, с помощью не своих рук, а 3d принтера-я таки осуществил сие! ^_^


Таки што я имею сказать по этому поводу: скользит просто как по льду. Поведение у нее — как у реальной шайбы.
Многие уже видели, я делал посты про эту систему. Однако, мы на днях завершили создание игрового стола и начали тестовые игры.
После первых игр, видно, как изменились клюшки – они стали «ветеранскими»: щедро покрыты царапинами и славой побед ^_^

Шайбе тоже досталось – ее потрепало в битве как надо: ^_^

Ну, что еще могу сказать по поводу? Да только «Blades of Steel» / Клюшки из стали :-))))
Видео первых тестов: 😉
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Источник