Как построить боевого робота класса Antweight
wikiHow работает по принципу вики, а это значит, что многие наши статьи написаны несколькими авторами. При создании этой статьи над ее редактированием и улучшением работали, в том числе анонимно, 14 человек(а).
Количество просмотров этой статьи: 11 209.
Хотели ли вы когда-нибудь построить боевого робота? Вы вероятно думали, что это слишком дорого и опасно. Тем не менее, большинство соревнований боевых роботов имеют весовую категорию 150 грамм, включая RobotWars. Этот класс в большинстве стран называется «Antweight» (англ. – муравьиный вес) и «FairyWeight» (англ. – вес как у феи) – в США. Они намного дешевле больших боевых роботов и не такие опасные. Поэтому они идеально подходят для новичков в деле боевых роботов. Эта статья расскажет вам как спроектировать и построить боевого робота класса Antweight.
ПРИМЕЧАНИЕ: Эта статья подразумевает, что вы уже читали и строили простого радиоуправляемого робота. Если нет, вернитесь исначаласделайте его. Следует отметить, что эта статья не является рекомендацией использования определенной части вашего робота. Это необходимо для поощрения творчества и разнообразия среди роботов.









- Если вы хотите, чтобы ваш робот мог бить, желательно присоединить сервопривод к сферическому «плечу», и иметь руку, установленную под углом 90 градусов, чтобы делать апперкоты.
- Ваш робот будет более оборонительным или нападающим? Так как вес ограничен, вы можете захотеть использовать большую его часть на оружие или броню. Постарайтесь сбалансировать эти характеристики на вашем первом роботе.
- Любого робота можно улучшить. Просто потому, что ваша первая модель робота не работает, не стоит её полностью выбрасывать. Возможно вам просто нужно заменить мотор. Даже если у вас полностью функционирующий робот, вы все ещё можете его улучшить. Посмотрите на моторы, которые больше подходят вашим целям, если новый мотор не используется в проекте, просто оставьте его и у вас будет возможность собрать другого робота. Постарайтесь улучшить некоторые части (обычно перед, зад и оружие) брони в алюминий, или даже титан, для большей «защиты от вертушек».
- Помните, что вы можете поместить вашего робота в куб по диагонали.
- Закажите запасные детали для вашего робота. Так как это боевой робот, ваши детали могут повредится в сражении. Если у вас есть запасные на руках, вы сможете быстрее заменить детали.
В правилах говорится, что робот должен поместится в куб 4X4X4 дюйма, тем не менее он может расширятся с помощью дистанционного управления. Вы можете извлечь из этого выгоду. К примеру, ваше переворачивающее оружие слишком выпирает. Постарайтесь разработать его так, чтобы flipper мог подняться прямо вверх и быть меньше четырех дюймов в высоту. Но когда flipper опускается (после того как куб поднят), длина станет больше четырех дюймов.
- После постройки своего первого робота и четкого понимания боевых роботов, постарайтесь построить ещё одного. Но, на этот раз, будьте уникальным. Постарайтесь сделать его не таким, как роботы у других людей в этой весовой категории. Если вы действительно амбициозны, вы можете попробовать сделать летающего робота! Летающие роботы допускаются правилами, но их редко строят.
- Если вы используете SketchUp, вы можете найти идеальные модели сервоприводов и других компонентов на Warehouse. Просто ищите название сервопривода (или компонента, который хотите) и смотрите, если что-то подойдет. Там есть не все, но то что вы найдете, обычно выглядит лучше и даст вам более аккуратную модель. Удостоверьтесь, что модель, которую вы нашли, того же размера, что и настоящая деталь
- Если вы опытны в механике и боевых роботах, вы можете попробовать построить шагающего робота. Если вы сделаете боевого робота, который ходит, вы получите дополнительный вес для работы.
Источник
Боевые роботы своими руками — через интернет? Почему нет. -)
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах.
Отписаться от уведомлений вы всегда сможете в профиле автора.

Эта история началась почти год назад. Сидели мы как то с другом и подумали, «а что если сделать систему, для игры через интернет? То бишь, управления реальными роботами?»
Сказано – сделано… «робота» 🙂 закипела…
В процессе предварительного обсуждения была выбрана конструкция «а-ля танк»- то есть 2 колеса с отдельными двигателями, без рулевой системы вообще. Эта система дает роботу высокую маневренность и возможность развернуться на 180 градусов, стоя на месте. Кроме того, побочным следствие такого разворота –является возможность наносить удар по шайбе(если есть клюшка) – на этом месте, многие должны вспомнить игру «настольный хоккей»- где хоккеисты вращаются вокруг своей оси и таким образом – бьют по шайбе.

Однако, такое устройство ходовой части – вызвало большие проблемы в будущем. Почему: 2 отдельных двигателя никогда не будут вращаться с синхронной скоростью, если не имеют жесткой механической связи. Почему: разность изготовления на заводе, погрешности в посадке и диаметрах колес и т.д. и т.п.
Поэтому, единственный путь синхронизировать колеса (если не связывать их некой жесткой связью – типа общей оси) – то использовать программную синхронизацию.
Сначала взяли для этих целей акселерометр/гироскоп. Но это оказалась насколько простая, настолько и не неудачная идея: робот стал «терминатором» — который четко «прёт» вперед и его не может сбить с курса ничто-даже удары других роботов. А это плохо 🙂 Мы здесь не «скайнет» строим – и такие «терминаторы» не нужны. К слову, программная реализация сего действа весьма сложна и сможет разобраться и инсталлировать только программер. Мне повезло-я программер :-))))
Пришлось отказаться. Второй путь – установка «энкодеров»(дырчатых дисков) на колеса и датчиков, считывающих импульсы, когда «дырка» проходит мимо датчика. Таким образом, зная скорости прохождения «дырок» на каждом из колес, — можно много раз в секунду корректировать скорости вращения колес и делать их одинаковой. Это не делает робота «терминатором» — его вполне можно сбить с курса, ударом другого робота. Это просто синхронизирует скорости колес. То, что надо.
Сразу скажу, что это был весьма тернистый путь — как с точки зрения использующихся технических решений, так и физической сложности изготовления: одних только деталей для роботов — было отпечатано более 100 штук! Причем печать велась на открытом балконе,

Достаточно сказать, что одна только управляющая программа для заливки в роботов – представляет собой 15 вкладок в Arduino IDE до 300 с лишним строк каждая О_о

Были на этом пути и неудачи: была закуплена большая партия Ni-Mh аккумуляторов и зарядных устройств, для них. Но, как оказалось, они не справляются с такой энергоотдачей.
И, в итоге- они полетели в корзину(условно)…:-(
Пришлось перейти на литий-ионные элементы 18650.


Сейчас система представляет собой веб сайт, на который ведется трансляция с youtube. «Пилоты» роботов заходят на него и берут в управление свободного робота. И «let the battle-begin. » 🙂
Управление ведется «стрелками» с клавиатуры. Также, оно дублировано на другую конкурирующую схему (лично я- «фу фу, только стрелки» 🙂 — но пускай будет) – WASD.
Для создания стола – мы закупили школьную доску.

И установили на нее бортик из алюминиевой полосы. Это работа была бы невозможной, без станочного парка. Тут нам тоже повезло-у нас есть токарный станок по металлу и сверлильный тоже..
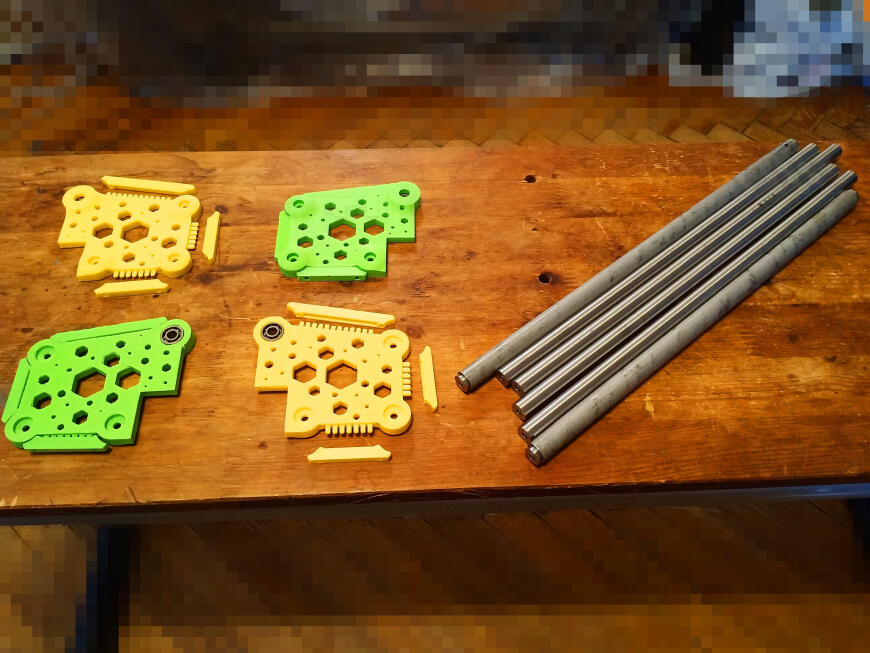
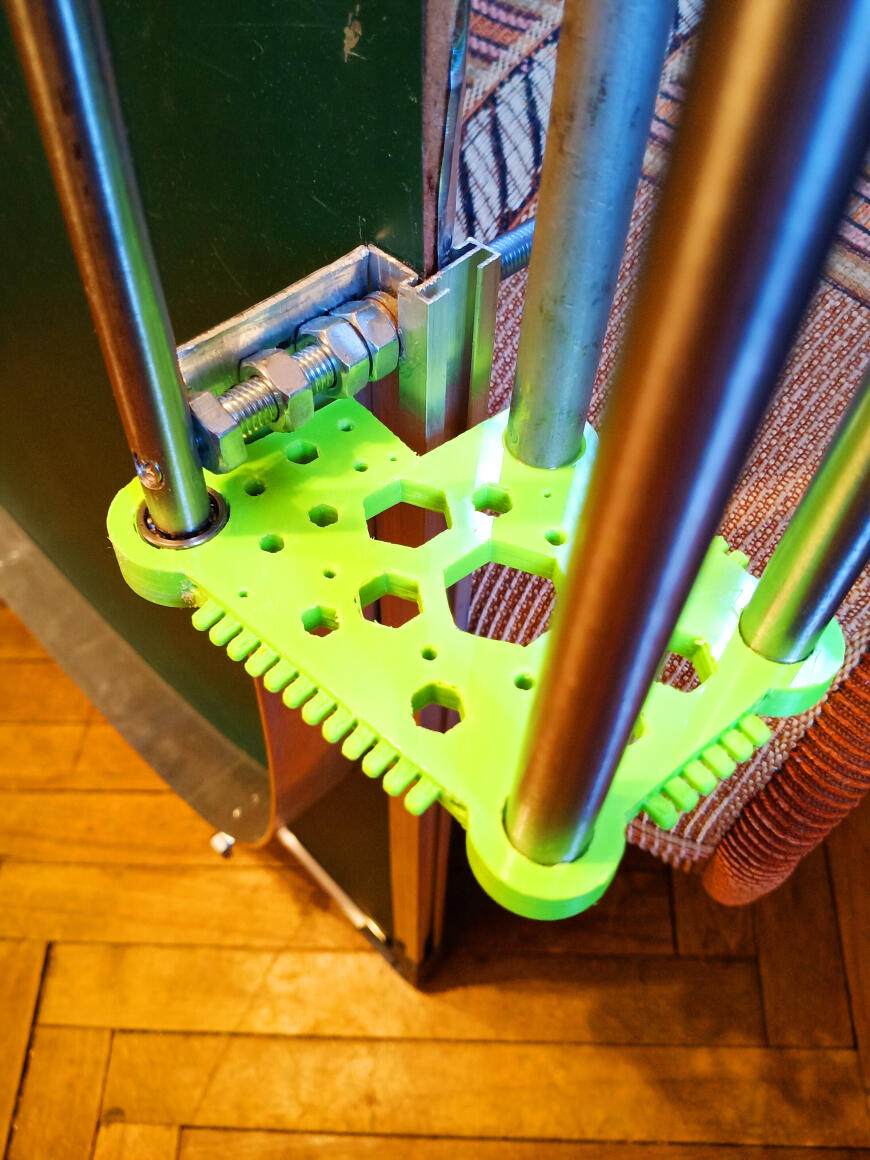
 Далее-дома валялась пару прутов из нержавеющей стали. Отпилили нужные куски из нее, выточили на концах оси под подшипники и установили их – как оси для ворот (ворота задумали как откидные, для того, чтобы доставать оттуда шайбы было проще).
Далее-дома валялась пару прутов из нержавеющей стали. Отпилили нужные куски из нее, выточили на концах оси под подшипники и установили их – как оси для ворот (ворота задумали как откидные, для того, чтобы доставать оттуда шайбы было проще).

 Далее — напечатали боковины ворот с плотной посадкой подшипников в них (подшипники завалялись у меня в количестве аж 50 штук от другого проекта).
Далее — напечатали боковины ворот с плотной посадкой подшипников в них (подшипники завалялись у меня в количестве аж 50 штук от другого проекта).
На боковинах можно видеть гребенки – натяжители сетки. Которые помогут нам натянуть сетку на ворота.
Далее – из того же нержавеющего прута и куска такой же нержавеющей трубы(ибо прут закончился нежданно-негаданно 🙂 ) – были выточены соединительные распорки для боковин.


В качестве сетки – случайно попался на глаза и был немедленно разодран :-)))))) — сетчатый мешок для стирки мелких вещей в стиральной машине. У него оказался весьма модный шестигранный рисунок сетки. Мы впали в восторг! :-)))
Однако, — рано радовались. Как оказалось, начался самый сложный этап для почти любого мужика- швейные работы! :-)))))) Как оказалось, это даже сложнее, чем программинг, 3d печать и токарные работы –вместе взятые! :-)))))))))

Вдоволь намучавшись – мы таки обшили сеткой ворота. Система — готова! Уииии. :-)))
В качестве шайбы – было взято решение, которое я подсмотрел давным давно-еще в начале 90-х, в журнале «Юный Техник».
Тогда я был моложе, трава зеленее — а руки у меня «кривее» 🙂
Они предлагали ее сделать из шайб для хоккея и больших шаров от подшипников. Это позволило бы играть в хоккей в крытом помещении на обычном полу.
Тогда -у меня ничего не вышло. Но, спустя примерно 30 лет, с помощью не своих рук, а 3d принтера-я таки осуществил сие! ^_^


Таки што я имею сказать по этому поводу: скользит просто как по льду. Поведение у нее — как у реальной шайбы.
Многие уже видели, я делал посты про эту систему. Однако, мы на днях завершили создание игрового стола и начали тестовые игры.
После первых игр, видно, как изменились клюшки – они стали «ветеранскими»: щедро покрыты царапинами и славой побед ^_^

Шайбе тоже досталось – ее потрепало в битве как надо: ^_^

Ну, что еще могу сказать по поводу? Да только «Blades of Steel» / Клюшки из стали :-))))
Видео первых тестов: 😉
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Источник
Как создать Боевого робота. Краткое руководство

Привет, Пикабу! На связи Лига Боевых Роботов. Сегодня у меня для вас краткое руководство по созданию боевых ботов. Этот материал написан на основе статьи от наших зарубежных коллег, написанной на английском языке. С оригиналом можно ознакомиться по этой ссылке.
Это не точный перевод. Мы убрали откровенную «воду» и добавили полезную информацию по теме. В данной статье основное внимание уделяется именно основам создания роботов, а не их устройству.
Выбор типа робота
О существующих типах боевых роботов и о весовых категориях можно прочесть в нашей статье «Боевые роботы. Типы и весовые категории». Там содержится вся информация, необходимая для выбора типа вашего первого робота. Настоятельно рекомендуем ознакомиться с ней перед прочтением этой статьи. Так же присоединяйтесь в нашему сообществу в ВК. Мы добавили несколько альбомов с фотографиями роботов в разных весовых категориях в качестве примеров.
Теперь, когда вы выбрали тип робота, вы готовы начать проектирование и сборку!
Залог создания хорошего робота – это серьёзный подход и проектирование. Многие хотели бы сразу взяться за инструмент и начать что -то строить. Но если попытаться обойтись без создания проекта робота в программе САПР, то итоговый результат вряд ли будет достойным. Такой робот наверняка получиться неэффективным, особенно, если это ваш первый опыт в таком деле. Программа САПР позволяет создать 3D модели всех деталей и создать т.н. сборку – полностью собранный проект робота в виртуальной среде. Это позволит не только получить 3D модели всех деталей со всеми размерами, которые будут идеально подходить друг к другу, но и произвести анализ напряжений, например, и вычислить объём и вес каждой детали, что очень важно, т.к. каждый робот должен вписываться в определённую весовую категорию. Потому создание робота нужно начинать именно с проектирования, хотя это может быть и не так увлекательно, как работа с материалами и сборка. Всё время, которое будет потрачено на проектирование, окупится с лихвой, в этом можете не сомневаться.
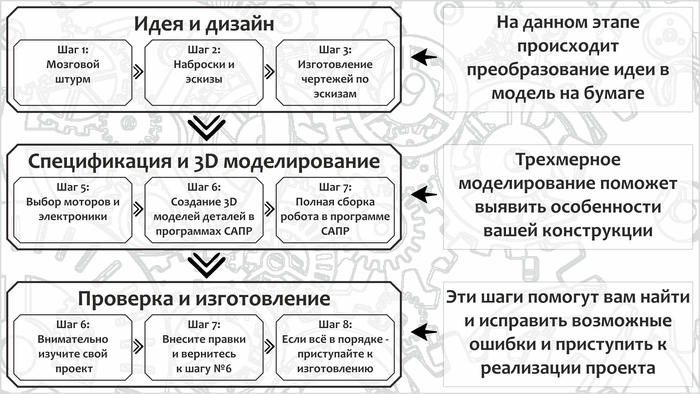
Шаг 1: Мозговой штурм
Процесс проектирования зачастую начинается с мозгового штурма. Первым делом, нужно определиться с типом оружия и весовой категорией робота. Далее нужно сделать следующие шаги:
· Найти и изучить все известные примеры таких роботов.
· Рассмотрите роботов с различными подвидами оружия, с разной бронёй и с различными системами привода.
· Попробуйте найти несколько видео, где можно будет посмотреть, как эти роботы показывают себя в бою.
· Обратите внимание на то, какие решения работают, а какие — нет.
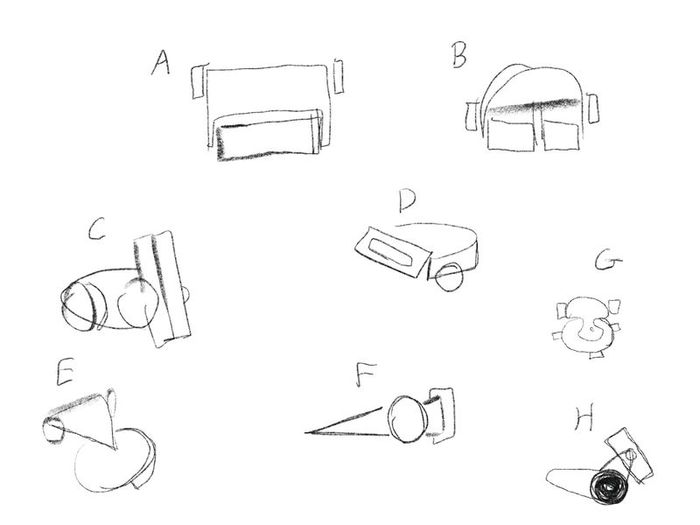
После того, как вы достаточно разбираетесь в конструкциях интересующих вас роботов, начните объединять вашу идею в концепцию. Сделайте черновые наброски, на которых будут отображены желаемая форма шасси, оружия и т.д.
Вещи, на которых нужно сосредоточиться во время мозгового штурма:
3. Система привода
4. Общая форма корпуса
Во время мозгового штурма нужно записывать абсолютно все идеи, которые приходят вам в голову, просто для того, чтобы их не забыть. Возможно, большинство из этих идей вы не сможете применить при создании одного единственного робота, к тому же, некоторые идеи могут конфликтовать с другими. Но вполне возможно, что вы сможете реализовать эти идеи позже, когда решите собирать следующего бота, либо когда будете работать в команде над большим проектом. Кстати об этом. Создание действительно хорошего и эффективного робота – это, чаще всего, именно командная работа. В особенности это относится к средним и тяжёлым весовым категориям.
С этого шага уже начинается проектирование робота. Первым делом можно прикинуть примерные размеры корпуса. Здесь можно отталкиваться от уже существующих роботов того же типа, и находящихся в той же весовой категории. Делаем первый эскиз:
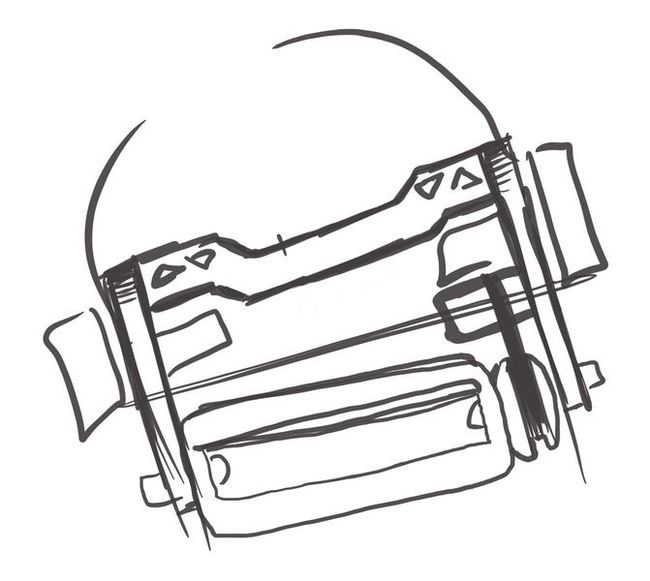
После этого нужно создать ещё несколько, постепенно добавляя детали, такие как расположение колёс, моторов, оружия, предполагаемый тип привода, примерное расположение электроники и аккумуляторов, расположение внутренних структурных элементов и крепежа для электроники. Начинать нужно с самых важных узлов.
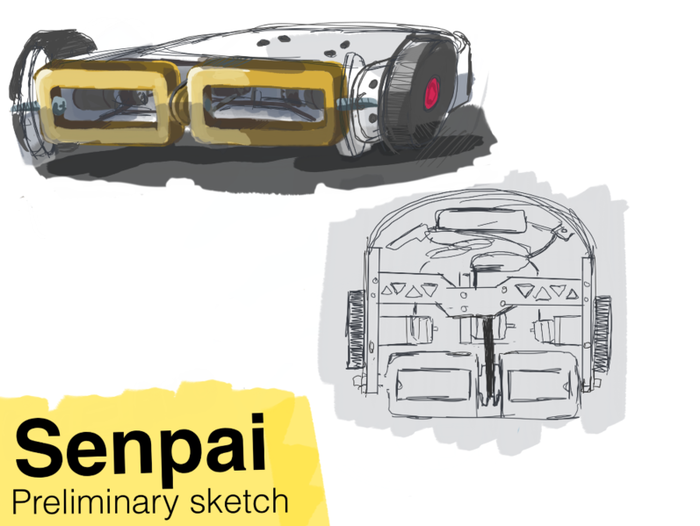
После того, как вы создали эскиз вашего бота, пора переходить к следующему этапу.
Пора создать более подробные эскизы, или даже чертежи. Чтобы не создавать бота, в которого вы потом не сможете запихнуть желаемую начинку, на этом этапе желательно уже иметь на руках все основные комплектующие, такие как моторы, регуляторы и аккумуляторы, или хотя бы знать их размеры и вес. Тут всё взаимосвязано. К сожалению, мы ограничены стандартными моторами, редукторами и аккумуляторами. Да, их выпускается множество видов, самых разных размеров и форм, но очень часто, для определённой весовой категории, используется всего несколько типов моторов т.к. они подходят лучше всего. А производители аккумуляторов, например, не станут подстраиваться под нас, и делать на заказ несколько единиц аккумуляторной батареи нужного нам размера и веса. Это нам нужно отталкиваться от размеров и веса стандартных комплектующих.
На этом же этапе нужно определиться с материалами, из которых мы будем собирать робота. Как я уже говорил, каждый робот должен вписываться в выбранную весовую категорию, это основное требование. При создании роботов в различных весовых категориях используются множество различных материалов. В лёгких весовых категория, таких как «Жук» (1,5 кг.) и «Хобби» (5,4 кг.), часто используются алюминий, карбон, нейлон и пластиковые детали, напечатанные на 3D принтере. А в более тяжёлых категориях в основном используются износостойкие стали и титан. Подробнее о материалах мы будем рассказывать в наших статьях, посвящённых определённым весовым категориям.
Здесь я могу предложить использовать таблицу, которую я составил, основываясь на книге по созданию боевых роботов. Эта книга написана командой RioBotz в далёком 2009 году, создателями робота Минотавр, которого вы могли видеть на шоу «BattleBots». Книга доступна только на английском языке, но зато она распространяется бесплатно и её может скачать любой желающий. В этой книге просто уйма полезной информации. К сожалению, у нас пока нет ресурсов, чтобы перевести её на русский. Если вы владеете английским, или сможете осилить машинный перевод (который, к слову, вполне читабелен) то обязательно прочтите эту книгу. Книгу в оригинале можно скачать в нашей группе в разделе документы, или скачать с официального сайта.
Так вот, по поводу таблицы. Здесь представлены все основные весовые категории, ограничения по весу в каждой из них, а так же распределение веса по всем основным узлам. В книге это называется правилом «30,30,25,15». Подобное распределение веса между узлами позволяет собрать достаточно эффективного и сбалансированного бота. Обратите внимание, что в США и Англии максимальный вес для некоторых категорий отличается.
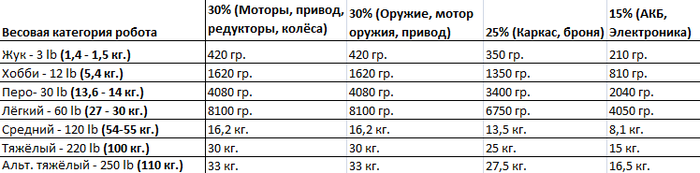
Безусловно, это не Аксиома, но это то, от чего можно отталкиваться. Например, зная вес моторов, аккумуляторов и регуляторов, которые вы хотите использовать, вы сможете узнать, сколько свободного веса у вас осталось на оружие и броню. Прикинув вес оружия, вы узнаете, сколько будет весить каркас и броня вашего робота. А это, в свою очередь, приведёт вас к выбору материалов и к толщине брони, которую вы сможете себе позволить. Да и в целом, знание веса, который вы сможете распределить на шасси, определённо внесёт коррективы в дизайн и размеры робота. Как я уже говорил – здесь всё взаимосвязано, на всех этапах создания робота.
Для облегчения дальнейшего проектирования можно сделать наброски, на которых будут изображены отдельные узлы, конструкцию которых нужно продумать заранее.
Так же на общем чертеже можно прикинуть расположение структурных элементов и крепёжных отверстий в деталях. Нужно подумать над тем, из каких отдельных деталей и узлов будет состоять бот, и как всё это будет собираться в единое целое.
Шаг 4: Выбор моторов
При выборе мотора нужно учитывать 3 момента:
Характеристики мотора (ТТХ двигателя, которые заложены производителем, и которые нельзя изменить).
Дизайн вашего робота (форма и размеры вашего бота, которые вы можете изменить)
Желаемые характеристики (ТТХ собранного робота, такие как мощность оружия, скорость и маневренность).
Свойства мотора, от которых нужно отталкиваться:
KV (оборот \ вольт) — Это значение нужно умножить на напряжение аккумулятора, чтобы узнать максимальные обороты в минуту.
Мощность (W) — Это значение нужно знать, чтобы вычислить время раскрутки оружия до максимальных оборотов.
Максимальный ток (A) — От потребляемого тока зависит выбор регулятора. Чем больше потребляет двигатель, тем более мощный и тяжёлый регулятор оборотов потребуется для него.
Максимальное напряжение (V) — Максимальное напряжение, которое двигатель может выдержать, от него зависит выбор регуляторов и аккумулятора.
Размеры двигателя – это тоже важный момент. Чем больше размеры моторов, которые вы используете, тем больше будет корпус робота, который сможет их вместить. А чем больше корпус – тем тоньше будет броня, которую вы сможете себе позволить, ведь робот должен вписываться в ограничения по весу для своей категории.
Вес. Здесь всё аналогично предыдущему пункту. Чем тяжелее моторы, тем меньше веса вы сможете выделить на остальные части робота.
Обратите внимание, что некоторые продавцы указывают вес упаковки с мотором, а не самого мотора.
Кроме того, имейте ввиду, что большинство (если не все) характеристик мотора, которые указывает продавец или производитель, являются теоретическим максимумом. Скорее всего, на деле все характеристики будут ниже заявленных, но их всё ещё можно использовать для предварительных расчётов.
Характеристики вашего бота, которые вы можете изменять:
Передаточное число – это соотношение межу диаметром шкива (шестерни, звёздочки и т.д.) установленного на двигатель, и диаметром шкива, установленного на оружие, к примеру.
Для привода оружия и колёс, как правило, устанавливаются понижающие редукторы. Чем больше разница в диаметрах, тем выше коэффициент редукции. От коэффициента редукции зависит максимальная скорость вращения оружия, и максимальная скорость, с которой робот сможет передвигаться.
Момент инерции (J): Эта величина нужна для расчёта времени, которое понадобится для раскручивания оружия до заданных оборотов, а так же для вычисления силы удара этого оружия.
Итоговые характеристики, которые вам нужно знать:
Скорость вращения оружия (об\мин.).
Этот параметр является одним из основных для создания разрушительного оружия. Для вращающегося оружия сравнительно небольшого диаметра, например такого, как барабан, желательно использовать высокие обороты — от 8000 об\мин. и выше. Для более крупного и тяжёлого оружия, например такого, как вращающееся лезвие горизонтального Спиннера, обороты должны лежать в диапазоне от 2000 до 5000 об\мин. Тут всё зависит от массы и размеров оружия – чем больше скорость вращения тяжёлого оружия с большим радиусом, тем большую отдачу получит ваш робот при ударе. Это может повлечь за собой серьёзные структурные повреждения вашего робота. Разорвать вражеского бота пополам одним ударом – это здорово. Но какой в этом смысл, если от такого удара и ваш собственный робот разлетится на части.
Это значение показывает, насколько быстро оружие раскручивается с нуля до максимальных оборотов. Первый удар в бою часто имеет решающее значение. Если вражеский бот столкнётся с вашим оружием до того, как оно наберёт максимальные обороты, то вы не нанесёте максимально возможный урон, а оружие будет снова раскручиваться с нуля, что даёт вражескому роботу время для манёвра. Потому очень важно, чтобы оружие раскручивалось до максимальных оборотов как можно быстрее. Для роботов в лёгких весовых категория, например, выход на максимальные обороты за 1 секунду считается хорошим результатом. Для ботов в более тяжёлых весовых категориях это могут быть 2 секунды. 3 секунды – это уже средний результат.
Кинетическая энергия (Дж)
Это значение представляет собой фактическую энергию, которую ваше вращающееся оружие будет производить и, следовательно, передавать другому роботу при ударе.
Вам потребуется вычислить ещё несколько значений, подробнее об этом мы напишем в отдельных статьях о расчётах силы удара оружия робота, и о подборе моторов.
Так же для примерных расчётов силы удара оружия можно использовать вот этот простой калькулятор.
Шаг 5: Создание 3D моделей в программе САПР
Этот шаг нужно выполнять одновременно с подбором моторов и других комплектующих.
Помните, что большинство деталей для роботов, особенно тяжёлых, часто изготавливаются на заказ. Если вы создали деталь, которую можно изготовить из большого бруска алюминия, например, но большая часть материала ( 50% и более) при этом будет превращена ЧПУ фрезером в стружку, то такие детали будут обходиться довольно дорого. Иногда лучше пересмотреть подход и попробовать оптимизировать процесс изготовления или упростить саму деталь, чтобы для её изготовления требовалось как можно меньше материала.
Вот несколько советов по созданию 3D моделей:
Расставляйте размеры таким образом, чтобы в любой момент можно было вернуться к самым первым шагам и изменить их. Для этого все размеры должны быть расставлены вручную, и не должны зависеть друг от друга там, где этого не требуется.
Используйте готовые 3D модели стандартных частей, таких как моторы, регуляторы и прочее, для своих сборок. Модели типовых деталей, которые используются чаще всего, можно найти в сети и таким образом сэкономить время.
Не забудьте указывать в свойствах детали материал, из которого она должна быть изготовлена, и его плотность. Это поможет легко вычислить точный вес детали ещё на этапе проектирования. Если этого не делать, то при постройке робота можно обнаружить, что вы едва собрали его наполовину, а его вес уже превышает максимально допустимый. Зная вес каждой детали в процессе проектирования, вы можете изменить её размеры, или вырезать окна облегчения, чтобы снизить вес, если это потребуется. Таким образом, даже не имея на руках основных деталей, таких как моторы, регуляторы и аккумуляторы, но зная их размеры и вес (указанные производителем) вы уже можете приступать к проектированию корпуса для вашего робота. Когда вы закончите сборку робота в программе, вам останется дождаться доставки всех деталей, проверить их размеры и вес и, если всё сходится, то можно будет приступать к изготовлению.
Шаг 6: Сборка проекта в программе САПР
Как только 3D модели всех деталей созданы, пора переходить к их сборке в единое целое. Важно создать полную сборку со всеми деталями, чтобы убедиться, что всё собирается и работает так, как и задумано. Далее небольшой список советов:
· Удостоверьтесь, что вес всех деталей, необходимых для сборки робота ниже, чем максимально возможный в той весовой категории, в которой будет выступать ваш бот.
· Учитывайте вес деталей, которые могут отсутствовать в сборке. Это могут быть провода, разъёмы, винты и прочие мелочи.
· Создайте сборки отдельных узлов робота, чтобы вы могли работать над несколькими из них параллельно.
· Не назначайте деталям случайные цвета и текстуры. Это может усложнить восприятие цельного проекта. Например, если деталь должна быть изготовлена из стали, то у неё должен быть соответствующий цвет и фактура.
· Не стоит недооценивать время, которое придётся потратить на сборку. Очень часто проблемы возникают уже после того, как всё собрано в единое целое, и на их устранение тоже может потребоваться время.
· Не вносите все поправки в одну единственную сборку, лучше сохраните несколько вариантов. Это позволит вернуться к старым версиям при необходимости.
После создания (или даже во время) сборки можно начать составлять список материалов и комплектующих. В такой список могут входить следующие пункты:
· Размеры стандартных листов материалов, которые можно купить, и размеры листов, которые необходимы вам для изготовления тех или иных деталей.
· Список и количество всех типовых деталей необходимых для сборки (помимо электроники), которые можно купить, такие как винты, подшипники, ремни и прочее.
· Ссылки на источники, где можно приобрести все необходимые материалы.
· Все необходимые замечания, связанные с деталями и материалами, просто чтобы не забыть.
Наличие такого списка позволит вам как можно быстрее приступить к созданию робота, сразу после завершения проектирования.
Шаг 7: Обзор проекта
Если вы создаёте робота в команде, а не в одиночку, то вероятно вам нужно будет продемонстрировать свой проект остальным товарищам, особенно, если вы новичок, а для создания бота будут использоваться материалы и оборудование, которые принадлежат всей команде. Ваши коллеги и наиболее опытные члены команды будут задавать вам вопросы по поводу вашего проекта, укажут на недостатки в конструкции и посоветуют, как их можно исправить. Критика вашего первого проекта может показаться излишне суровой, но не забывайте о том, что эти люди просто пытаются помочь вам создать лучшего бота. Проекты тяжёлых роботов обычно проходят 3-5 проверок до того, как они будут одобрены, т.к. тяжёлые роботы – самые дорогие в производстве, и любые ошибки в проектировании могут обойтись очень дорого. Так же важно делать заметки и записи во время таких проверок, просто чтобы не забыть все советы по устранению проблем.
Шаг 8: Постройка
Вот и всё, теперь вы готовы воплощать ваш проект «в металле». Во время сборки настоящего робота у вас может возникнуть необходимость внести небольшие изменения в конструкцию по тем или иным причинам. Очень сложно учесть все нюансы при моделировании на компьютере. Не забудьте внести эти изменения в вашу сборку в программе САПР, когда робот будет закончен.
Дубликаты не найдены

Лига Боевых Роботов
8 постов 161 подписчик
Правила сообщества
Запрещено хамство и оскорбления, уважайте чужой опыт и труд.
@KorvinWorkshop привет! Я с деловым предложением
У нас на Пикабу есть Лига роботов. Лига роботов посты в нее регулярно падают, но админ неактивен с 2017 года. Не хочешь ли ты либо взять себе это сообщество, либо слить с твоим и тогда несколько расширить тематику?
Опять все игнорят?(
Ну вон сапком вопрос задал, а ты не ответил
Я всё ещё думаю)
Я б слил. Будет у тебя 400 подписчиков, а не 80. Разве не здорово?
Если сливать, то придётся менять название. Если точнее, то придётся оставить название бОльшего сообщества — «Лига роботов». Мои ребята, возможно, не захотят читать прочие посты, которые там публикуются. А если оставить «Лигу боевых роботов», то там будут только тематические посты, без прочих новостей. Не факт, что это интересно людям, которые подписывались на «Лигу роботов». Хотелось бы оставить отдельное сообщество, именно по боевым ботам, чтобы посты не терялись среди новостей и прочего. Да и не гонюсь я за количеством)
Отчего же? Оставь свое название. Людям, которым интересны все роботы, боевые тоже интересны. Зато это может дать буст и посты будут выходить в горячее чаще.
Ну не гонишься за количеством, но 400 подписчиков-то оно приятнее, чем 80?
Я вот не так давно тоже смержил Икусственный интеллект в Машинное обучение, считаю, что сделал правильный выбор
Приветствую =) Насчёт объединения не уверен, всё же хотелось собрать в сообществе тех людей, кому это действительно интересно. К тому же, название придётся поменять. А насчёт управления сообществом — могу попробовать =)
Отлично, сейчас поставлю
а высоковольтное оружие запрещено? шокеры, тазеры и тому подобное
Да, запрещено. Скоро выложим перевод правил.
Смотря в какой именно весовой категории. Ещё зависит от используемых комплектующих и материалов. Бота весом 150 грамм можно собрать за 1-2 т.р. при наличии 3D принтера. Бот в категории 1,5 кг. обойдётся примерно в 8-10 т.р.
Аппаратурой радиоуправления, посмотрите посты в нашем сообществе.
Куда как интереснее создать не боевого робота, «боевые качества » которого могут только рассмешить, а создать робота для общения с клиентами.
На стойку, бара, например.
Чтобы развлекал и завлекал клиентов. Может быть и наливал.
Чем вас смешат боевые качества? Даже самые лёгкие боевые боты представляют опасность для человека.
Чем так помешали человеки что им надо угрожать?

Боевые роботы. Типы и весовые категории
Всем привет! Сегодня хотелось бы поговорить о типах боевых роботов и о весовых категориях.
Если эта тема Вам интересна, то советую прочесть и другие посты в нашем сообществе Лига Боевых Роботов.
Итак. Существует множество основных типов вооружения боевых ботов. Перечислим основные и самые популярные из них.
Борец\ Хвататель (Grappler). Задача такого бота — схватить оппонента. Затем либо толкать на оружие, которое расположено внутри арены, либо сбросить в яму, если таковая имеется.

На фото: Робот «Overhaul» (США).
Крушитель (Crusher). Такой робот оборудован клювом из высокопрочной стали, который, чаще всего, приводится в действие гидравликой. Обычно это медленное, но мощное оружие, которое направлено на то, чтобы продавить броню вражеского бота и повредить начинку.

На фото: Робот «Quantum» (Англия)
Огнемётчик (Flamethrower). Тут всё просто – к роботу прикручен ГАЗОВЫЙ огнемёт (напалм использовать нельзя). Чаще всего огнемёт используется как дополнительное оружие.

На фото: Робот «Blacksmith» (США) . Основное оружие – молот. Дополнительное – огнемёт (встроен в молот).
Молот (Hammer). Робот с молотом. Либо с лёгким и быстрым, либо с медленным, но тяжёлым.

На фото: Робот «Shatter!» (США)
Поднимала\Подъёмник (Lifter). Такой робот оборудован подъёмным механизмом, которым он может приподнять и перевернуть вражеского бота (Зачастую и себя самого, при необходимости).
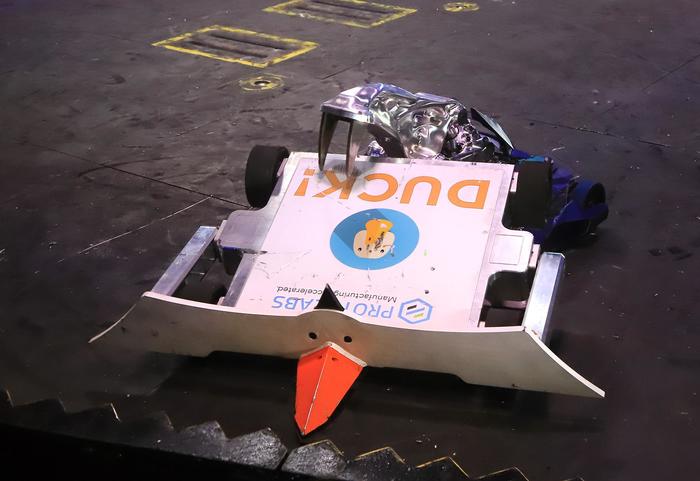
На фото: Робот «DUCK!» (США)
Опрокидыватель (Flipper). Робот оборудован пневматической (реже гидравлической) системой, которая выстреливает опрокидывающий ковш (или клин) вверх, что позволяет перевернуть противника.

На фото: Робот «Hydra» с гидравлической системой (США)
Существует разновидность «Опрокидывателя» под названием «Запускатель» (Launcher) – Это настолько мощный «опрокидыватель», что он может не только перевернуть противника, но и подбросить его в воздух. Хотя, то же самое могут сделать и многие «флипперы».

На фото: Робот «Bronco» с пневматической системой (США)
И вот здесь не всё понятно. И «Бронко» и «Гидра» могут подбросить противника, но относятся создателями шоу «Battlebots» к разным типам. Вероятно, это одно и то же, просто разные участники используют разные названия. Хотя, возможно, это именно современные «Опрокидыватели» стали настолько мощными, что превратились в «Запускателей».
Мультибот. Это участник, на стороне которого сражаются сразу несколько лёгких роботов, суммарный вес которых не должен превышать максимальный в этой весовой категории.

На фото: Роботы «The Four Horsemen» (Англия)
Пила (Sawbot). Робот, оборудованный пилой. Такие роботы редко наносят серьёзные повреждения противнику, но зато часто высекают гигантские снопы искр, которые могут впечатлить судей.

На фото: Робот «Skorpios» (США)
Барабанный спиннер (Spinner – Drum). Один из самых разрушительных видов оружия. Чаще всего вес барабана – это примерно треть от веса всего бота. Невероятно мощная штука.

На фото: Робот «Minotaur» (Бразилия)
Спиннер с вертикальным брусом (Spinner – Bar Vertical). Очень популярный сегодня тип вооружения. Напоминает робота – пилу. Но вместо диска по металлу или бетону, здесь устанавливается небольшая пластина (даже скорее длинный брусок металла) из высокопрочной стали. Формы и размеры пластин существенно различаются.

На фото: Робот «Bite Force» (США) Чемпион 2015, 2018 и 2019 годов.
Спиннер с горизонтальным брусом (Spinner – Bar Horizontal). В умелых руках это, наверное, самое разрушительное оружие из существующих. Как и в случае с барабаном, чаще всего вес его вращающейся рельсы составляет значительную часть от веса всего бота.

На фото: Робот «Rainbow» (Россия) Участник Battlebots 2019.
Цельнометаллический спиннер (Spinner – Full Body). Это спиннер, оружием которого является его собственный корпус. Его броня – это и есть оружие. Снаружи выглядит как диск, вращающийся вокруг вертикальной оси.

На фото: Робот «Gigabyte» (США)
Самыми распространёнными видами оружия сейчас являются: Барабан, спиннер с вертикальной рельсой, спиннер с горизонтальной рельсой и опрокидыватель. Чуть менее распространёнными являются: молот, цельнометаллический спиннер, подъёмник и крушитель.
У каждого типа есть свои плюсы и минусы, ботов с идеальным оружием пока не существует. Какой из них выбрать – зависит от навыков, имеющегося в наличии инструмента и, конечно же, от бюджета. Если вы ещё не смотрели шоу Battlebots — настоятельно советую посмотреть. Хотя бы сезоны 15,16,18 и 19 годов (В 2017 шоу не проводилось). Это даст вам представление о том, на что способен тот или иной тип оружия.
Теперь о весовых категориях. В США и Европе (в Англии, если точнее) есть своя организация, регламентирующая изготовление ботов и проведение соревнований. В США это «SPARC», а в Англии – «FRA». Если знаете английский, то сможете найти на сайтах этих организаций очень много полезной информации.
Начнём с США. Весовые категории, одобренные организацией «SPARC»:
Fairyweight (Фея) – 0.15 кг. (0,33 lb)
Antweight (Муравей) — 0.45 кг. (1 lb)
Beetleweight (Жук) – 1.4 кг. (3 lb)
Mantisweight (Богомол) – 2.7 кг. (6 lb)
Hobbyweight (Хобби) – 5.4 кг. (12 lb)
Dogeweight (Пёс\Собака) – 6.8 кг. (15 lb)
Featherweight (Перо\Пушинка) – 14 кг. (30 lb)
Lightweight (Лёгкий) – 27 кг. (60 lb)
Middleweight (Средний) – 54 кг. (120 lb)
Heavyweight (Тяжёлый) – 100 кг. (220 lb)
Alt Heavyweight Class (Альтернативный тяжёлый) – 110 кг. (250 lb)
На шоу «Battlebots» в США и на «Битвах роботов» в России сражаются именно роботы в категории до 110 кг.
Теперь весовые категории, одобренные Английской ассоциацией «FRA» (Fighting Robots Association):
Antweight (Муравей) — 0.15 кг.
Beetleweight (Жук) – 1.5 кг.
Featherweight (Перо\Пушинка) – 13.6 кг.
Lightweight (Лёгкий) – 30 кг.
Middleweight (Средний) – 55 кг.
Heavyweight (Тяжёлый) – 110 кг.
Как видите, в Англии весовых категорий почти вдвое меньше. Вес немного отличается и есть отличия в определении класса «Antweight».
Сейчас, когда наше сообщество только зарождается, нам, первым делом, нужно будет сформировать свой свод правил по изготовлению боевых роботов. Там будут определены весовые категории, разрешённые типы оружия и материалы, из которых можно изготовить бота. Так же всегда существуют и запреты на некоторые виды оружия и материалов, использовать которые не безопасно для окружающих (даже в рамках боёв роботов, внутри коробки из поликарбоната с толстыми стенками).
Вскоре мы переведём и опубликуем правила обеих Ассоциаций. Всё же опыт коллег нам сейчас просто необходим. Я думаю, что самый простой вариант – это внести необходимые поправки (если таковые потребуются) и просто принять на вооружение один из регламентов. Тот регламент, что существует для «Битвы роботов», которая ежегодно проводится в России, не совсем подходит. Просто потому, что это регламент конкретного мероприятия, а не Ассоциации создателей боевых ботов, которой у нас пока нет. К тому же, в существующем регламенте «Битвы роботов» обговорены только общие моменты, и он касается только тяжёлых ботов весом до 110 кг. Нам же нужен регламент, по которому можно будет создавать роботов во всех весовых категориях. Человек, который захочет создать робота должен быть уверен, что если он собрал робота по всем правилам, то его примут на любом чемпионате.
Позволю себе высказать свою точку зрения. Думаю, что нам будет ближе именно Английский регламент. Во -первых – по географическим причинам. Никто не поедет с карманным роботом на соревнования в США. А вот взять лёгкого робота и поехать на соревнования в Англию – это возможно (по крайней мере, для некоторых из нас).
К тому же мне нравится, что в Английском регламенте не так много весовых категорий. Сейчас – это хорошо для нас. Пока наше дело не столь популярно, нам не стоит распыляться. К слову, именно по этой причине в Английском регламенте не так много весовых категорий, как в Американском. Что лучше: 30 роботов в 8 -10 весовых категориях (по 3 в каждой)? Или те же 30 ботов в 3-х основных? Уже по десятку в каждой – можно проводить турнир. В Англии, например, наибольшей популярностью пользуются категории 150 гр., 1.5 кг, 13.6 кг и 110 кг.
Единственное, я бы добавил в наш список категорию Hobbyweight (Хобби) – 5,4 кг.
В Английском регламенте есть огромный провал между категориями 1.5 кг и 13.6 кг. Нужно что -то среднее. Тем более, что 13.6 кг робот – это уже довольно серьёзная и не дешёвая машина. Категория 5.4 кг. может быть переходным звеном – всё ещё не дорого, но уже и не игрушка. К тому же, робот в категории 5.4 кг. всё ещё достаточно прост и компактен, чтобы даже один человек смог его собрать и привезти на соревнования в одном чемодане, со всеми запчастями и инструментом для ремонта.
Думаю, что для начала нужно сосредоточиться именно на лёгких классах – 1.5 кг, 5.4 кг. и 13.6 кг. Ну и 150 грамм, конечно же. Первым делом новичку желательно собрать робота именно в этой весовой категории. Обходится он очень дёшево, и собрать такого миниатюрного бота можно буквально за день – два, особенно если под рукой есть 3D принтер.
В одной из следующих статей я постараюсь сделать небольшой обзор ботов в некоторых весовых категориях. Из чего они сделаны, какие комплектующие используются чаще всего и во сколько всё это обходится.
Спасибо, что дочитали до конца =) Обязательно напишите — что Вы думаете по поводу регламентов и весовых категорий. А так же о том, стоит ли переводить названия весовых категорий дословно. Или, может быть, их стоит адаптировать? Или просто использовать для обозначения вес?
Источник