- Самодельный летающий дрон с камерой, который следует за вами на автопилоте (на основе Arduino)
- Дрон своими руками: Урок 1. Терминология.
- Содержание
- Введение
- Терминология
- Механика
- Силовая установка
- Управление
- Сенсоры/Ориентация
- Видео
- Вы действительно хотите собрать БПЛА с нуля?
- Игрушка/Toy
- БПЛА набор/UAV Kit
- Сборка с нуля/Custom
Самодельный летающий дрон с камерой, который следует за вами на автопилоте (на основе Arduino)


В наши дни дроны — это очень популярные игрушки. На рынке можно найти профессиональные летающие дроны и дроны для любителей. У мастера, автора данной статьи, есть четыре беспилотника (квадрокоптеры и гекскоптеры), потому что он любит все, что летает, но 200-й полет не так интересен и становится скучно, поэтому он решил создать свой собственный дрон с некоторыми дополнительными возможностями. Мастер любит программировать на Arduino и проектировать схемы и гаджеты, поэтому он начал его строить. В самоделке использован контроллер полета MultiWii, основанный на чипе ATMega328, который также используется в Arduino UNO, поэтому программирование довольно простое. Этот беспилотник может быть подключен к смартфону на Android, который отправляет свои данные GPS на беспилотник, который сравнивает эти данные с его собственным сигналом GPS, а затем начинает следовать за телефоном. Поэтому, если двигаться по улице, дрон будет следует за вами. Конечно, есть много недостатков, однако дрон следит за телефоном, снимает видео, а также имеет ультразвуковой датчик расстояния, чтобы избежать препятствий в воздухе. Это особенности самодельного беспилотника.
Шаг 1: Основные свойства

Дрон работает почти полностью автоматически, вам не нужно управлять им, потому что он следует за вашим телефоном, который обычно находится всегда с вами, ультразвуковой датчик помогает обходить деревья, здания и другие препятствия, а GPS выдает очень точные данные о местоположении, но давайте посмотрим, что мы имеем в итоге:
— Аккумулятор 1000 мАч, хватает на 16-18 минут непрерывного полета;
— ультразвуковой датчик, чтобы избежать препятствий в воздухе;
— Модуль Bluetooth для получения данных с телефона;
— Микроконтроллер на основе Arduino;
— встроенный гироскоп;
— регулируемая максимальная высота (5 м);
— при низком заряде батареи, дрон автоматически падает на телефон; (желательно держать телефон в руках)
— затраты на постройку дрона около 100 долларов;
— можно запрограммировать на что угодно;
— с помощью GPS можно отправить беспилотник по любым координатам;
— дизайн в стиле квадрокоптера;
— оборудован 2-мегапиксельной видеокамерой 720p HQ;
— весит 109 г;




— Паяльник;
— Клей-пистолет;
— резец;
— Кусачки;
— Супер клей;
— Двухсторонняя клейкая лента;
— Резинки;
— MultiWii 32kB Flight Conroller;
— Модуль последовательного GPS;
— Серийный I2C конвертер;
— Модуль Bluetooth;
— Ультразвуковой датчик;
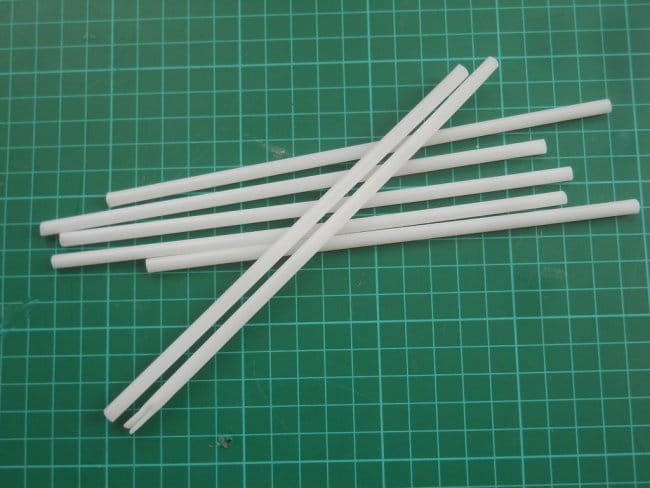
— Кусок жесткой пластмассы;
— Соломинки из кафе;
— зубчатая передача;
— Двигатели;
— Пропеллеры;
— Винты;
— L293D Motor Driver (это был неудачный выбор драйвера, будет исправлено во второй версии);
— 1000 мАч литий-ионный аккумулятор;
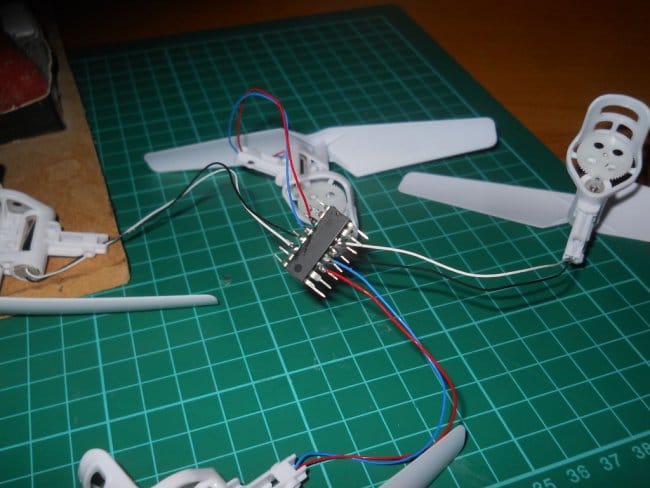
Шаг 3: Сборка пропеллеров
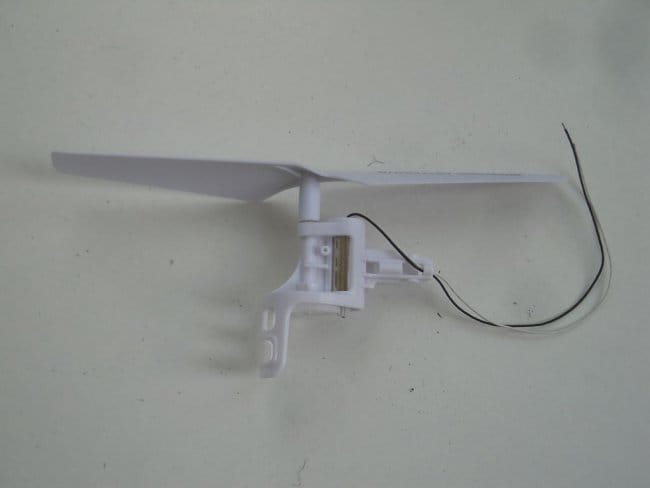

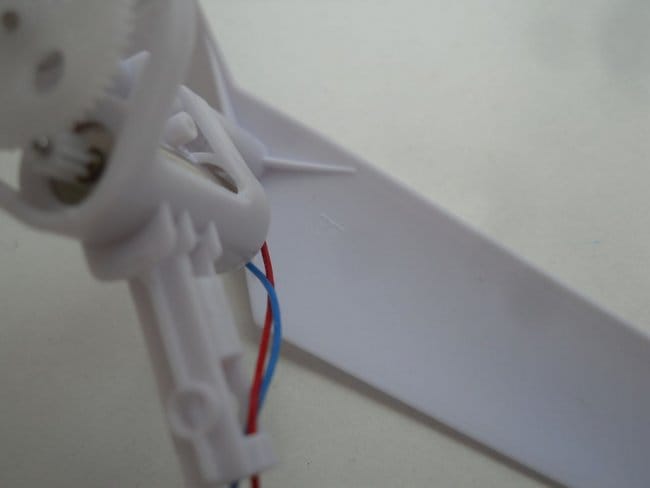

Мастер купил эти пропеллеры с моторами на Алиэкспресс, они являются запасными частями для дрона Syma S5X, но они оказались полезными и для данной самоделки.
Шаг 4: Принципиальная схема
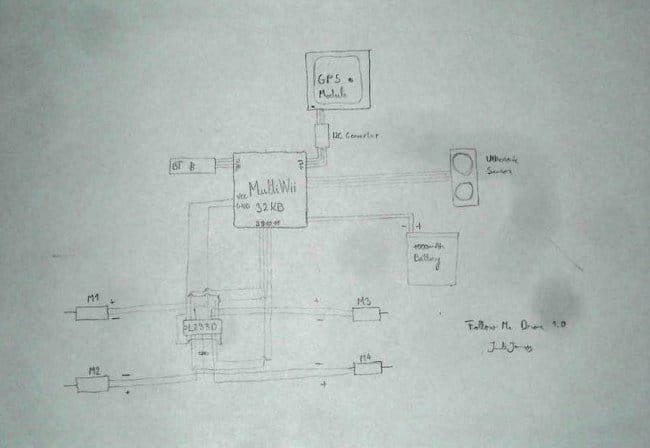
Всегда смотрите на схему во время работы и будьте осторожны со связями.
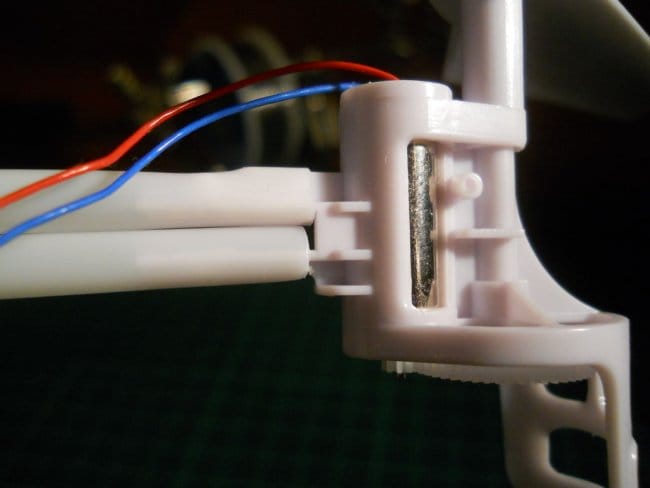
Шаг 5: Пайка двигателей к драйверу управления


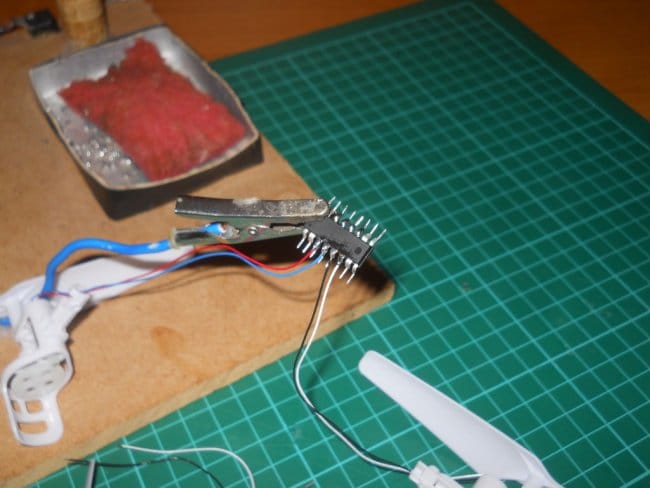

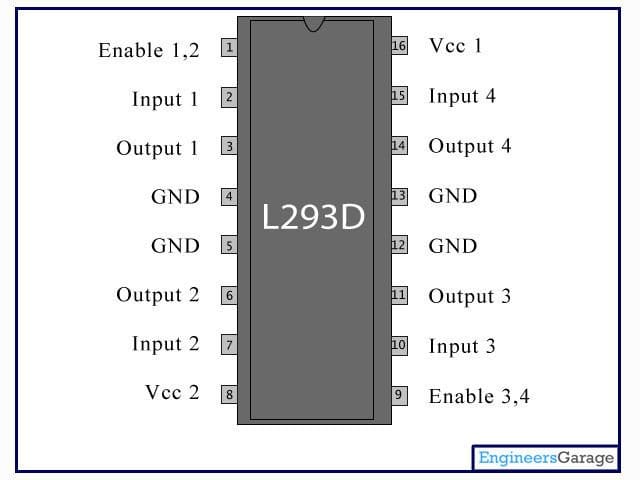
Теперь вам нужно спаять все кабели от двигателей до ИС драйвера двигателя L293D. Посмотрите на картинки, они говорят гораздо больше. Вы должны подключить черный и синий провода к заземлению и положительные провода к выходам 1-4. L293D может управлять этими двигателями, но мастер рекомендует использовать силовые транзисторы, потому что этот чип не может работать со всеми четырьмя двигателями при высокой мощности (более 2 А).


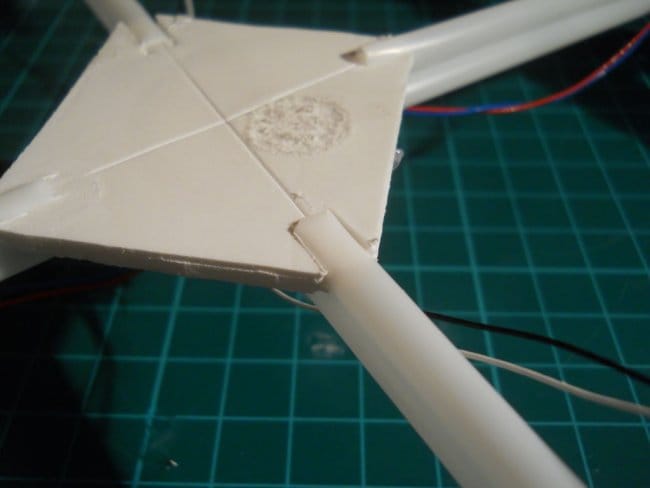
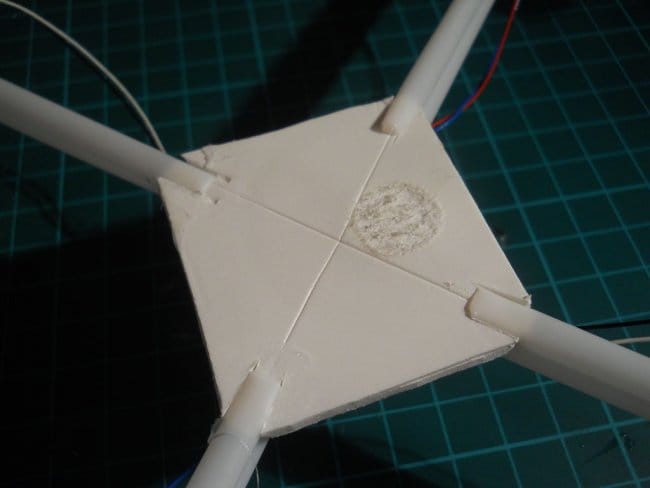
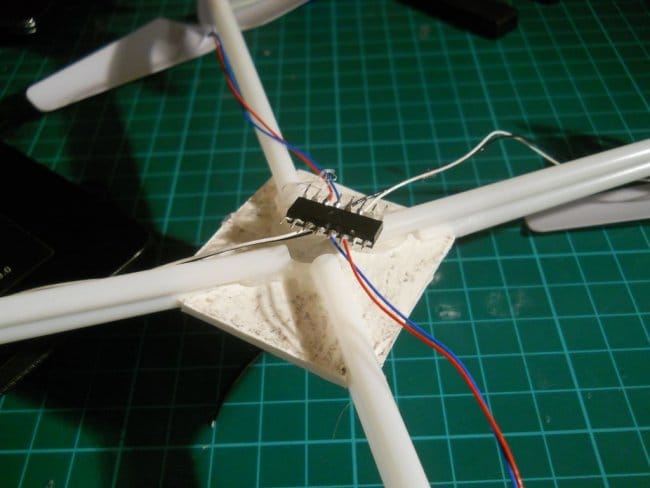
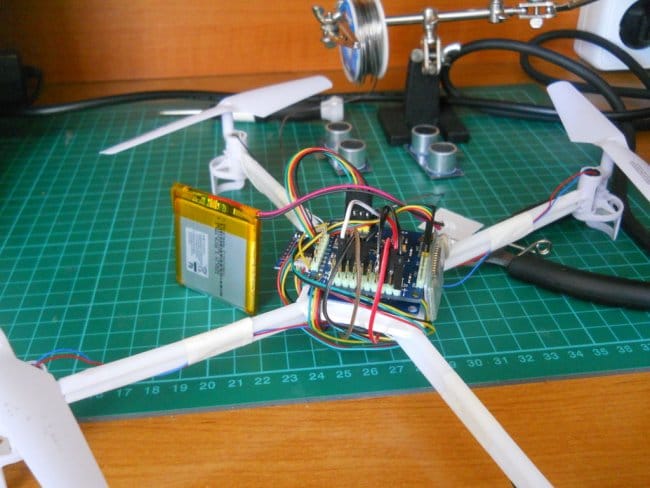
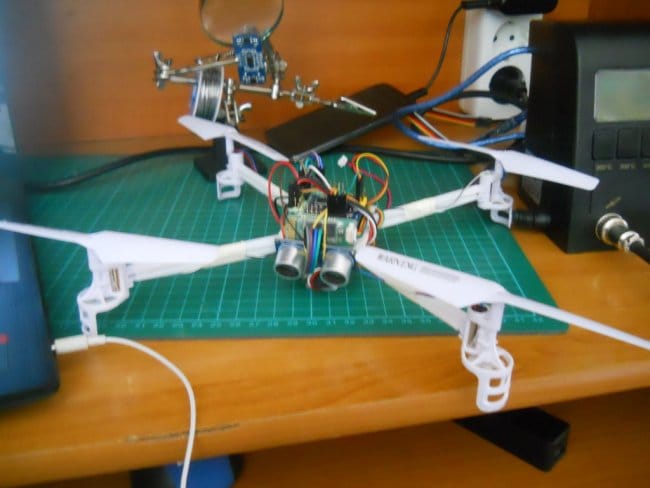
Пожалуйста, обратите внимание на вторую картинку, на которой показано, как оборудовать пропеллеры. Используйте крепкие трубочки-соломинки из кафе и кусок пластмассы для сборки рамы. Используйте немного горячего клея и супер клея для всех четырех винтов, затем проверьте соединения. Очень важно, чтобы пропеллеры находились на одинаковом расстоянии друг от друга.
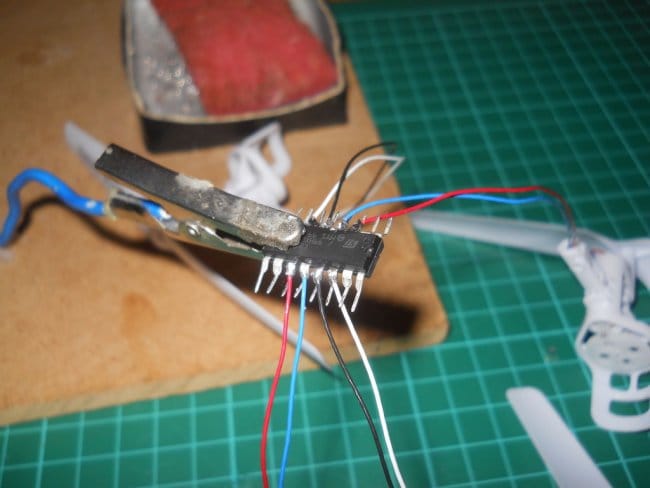
Шаг 7: Добавление проводов к драйверу L293D




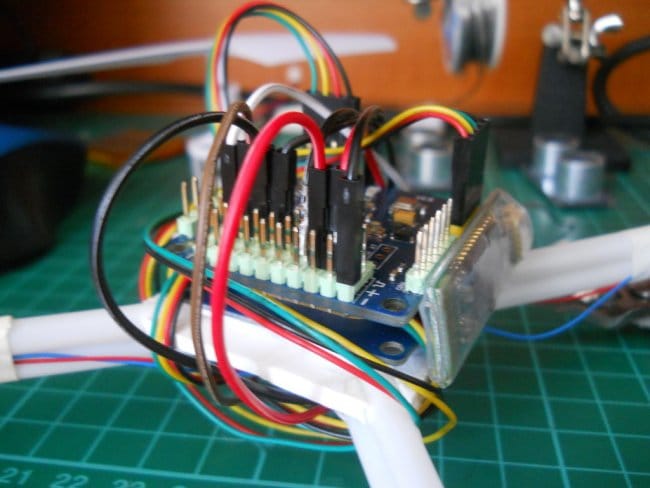
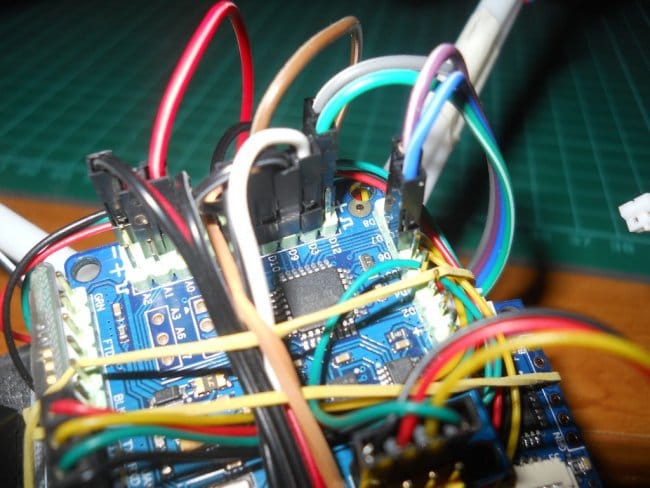
Припаяйте провода к оставшимся контактам микросхемы. Это поможет подключить контакты Arduino к входам / выходам. Теперь пришло время построить схему.
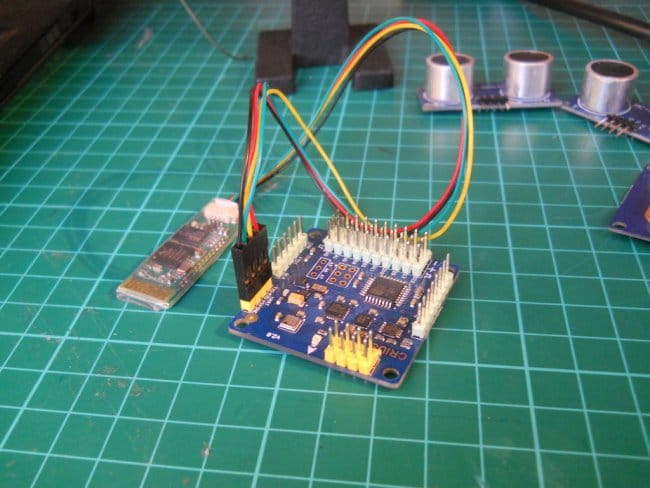
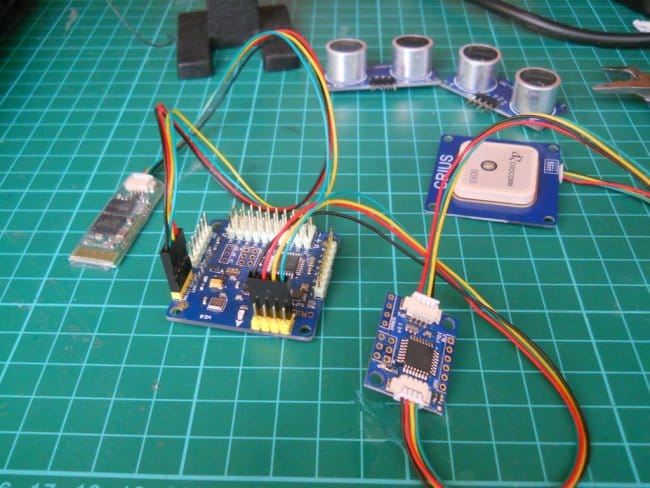
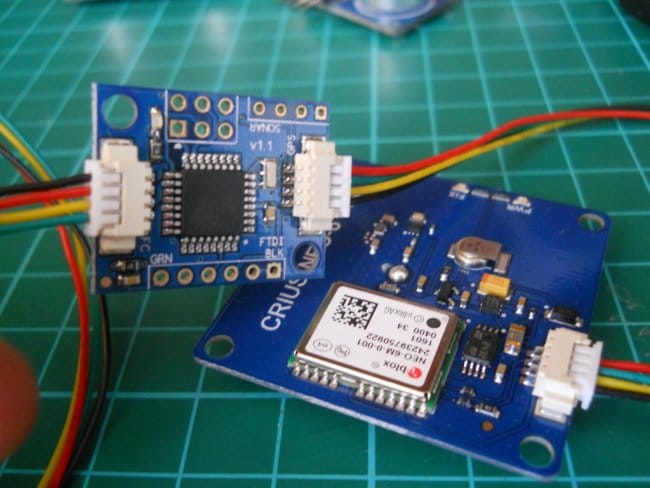
Все модули включены в комплект контроллера полета, который мастер заказывал заранее, так что просто нужно соединить их вместе. Bluetooth идет к последовательному порту, сначала GPS в преобразователе I2C, затем в порту I2C. Теперь данную схему можно установить на свой дрон.
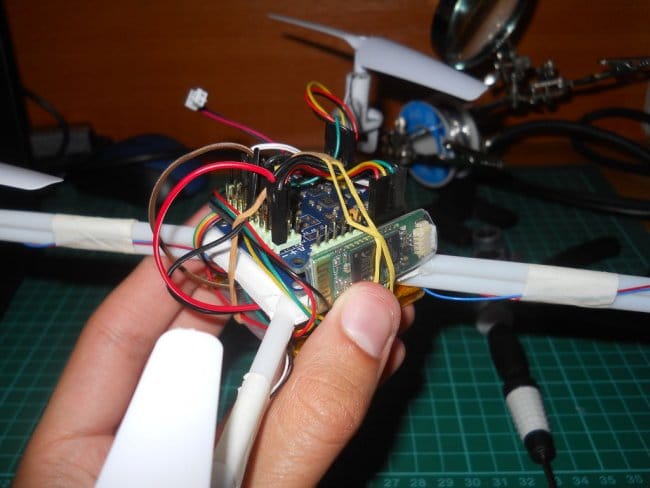
Шаг 9: Крепление электрической цепи к раме


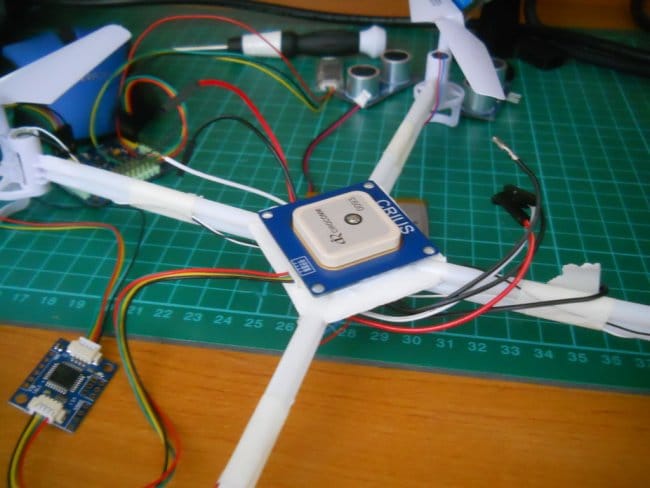
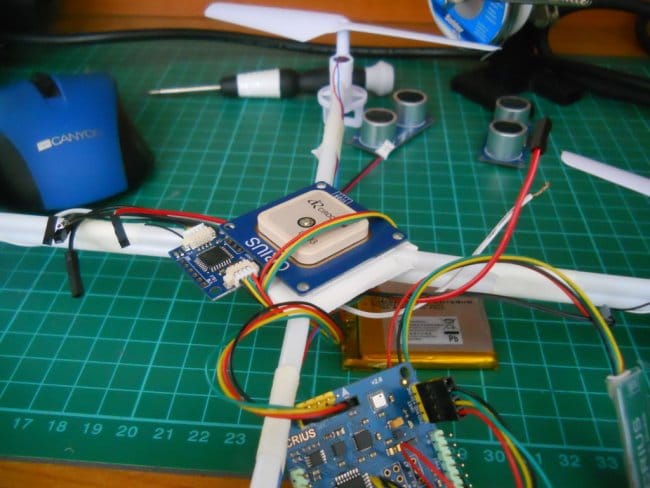

Используйте двустороннюю ленту и сначала добавьте GPS. Эта губчатая лента удерживает все на месте, поэтому приклейте каждый модуль один за другим на пластиковую деталь. По окончанию следует подключить контакты привода двигателей к MultiWii.
Шаг 10: Соединение двух цепей


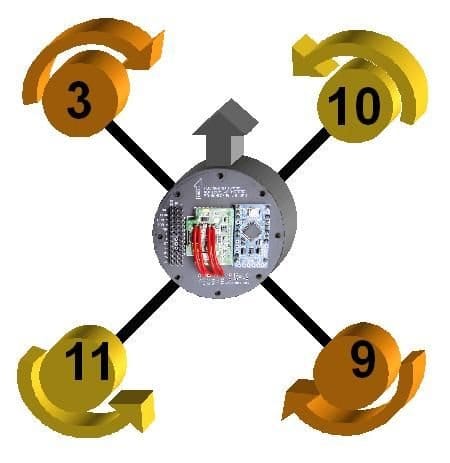
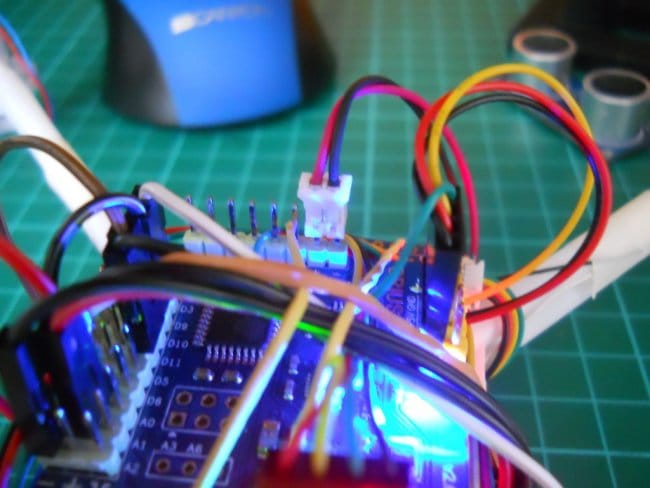
Входные контакты поступают на D3, D9, D10, D11, остальные должны быть подключены к контактам VCC + и GND.



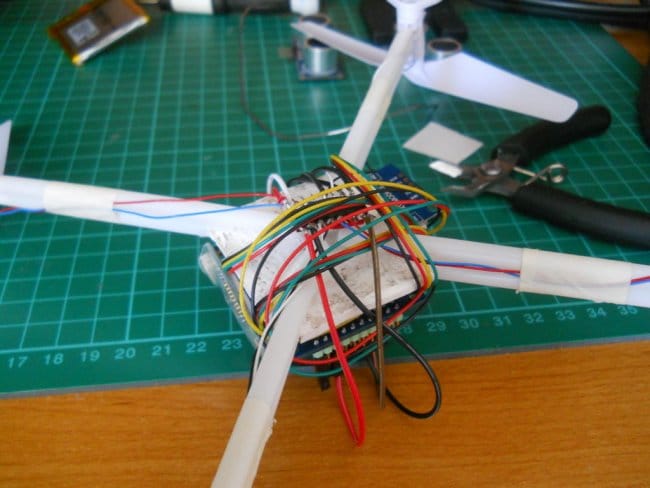
Мастер использовал несколько резиновых лент, чтобы прикрепить батарею к дрону. Держится довольно крепко.
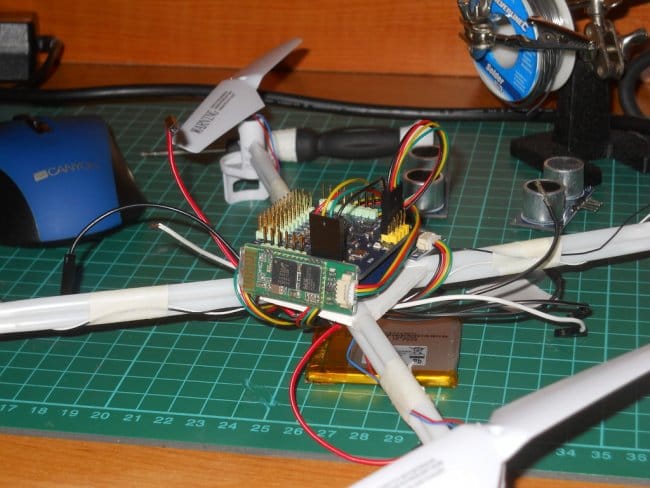
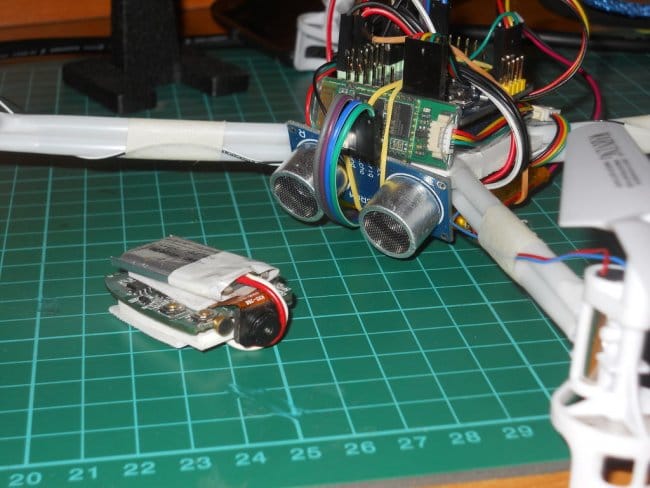
Шаг 12: Ультразвуковой датчик

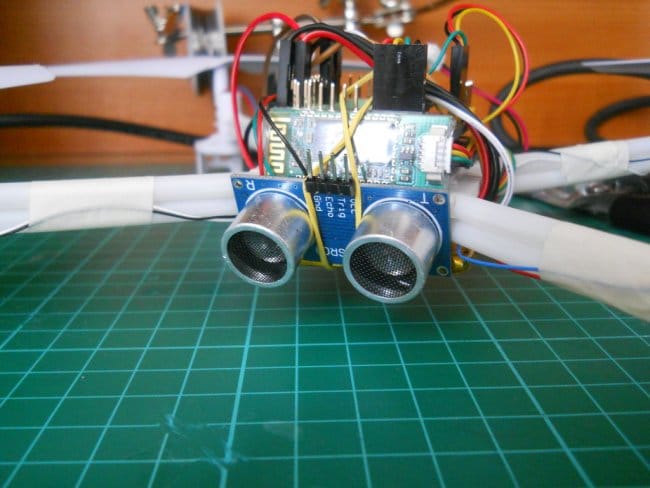
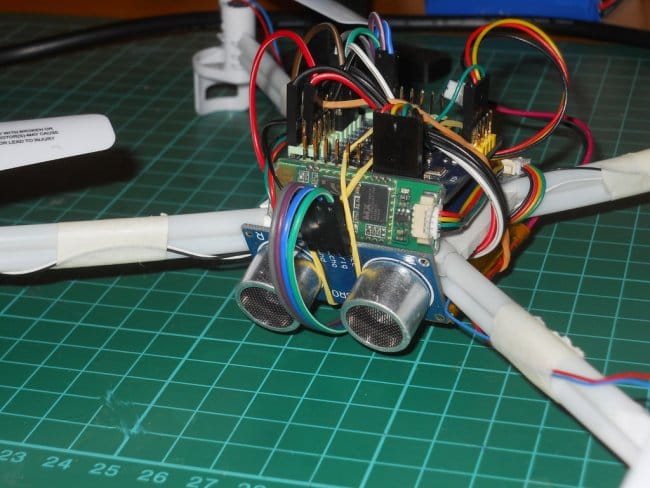
Датчик гидролокатора закреплен на дроне резиновой лентой и подключен к контактам D7 и D6 контроллера MultiWii.
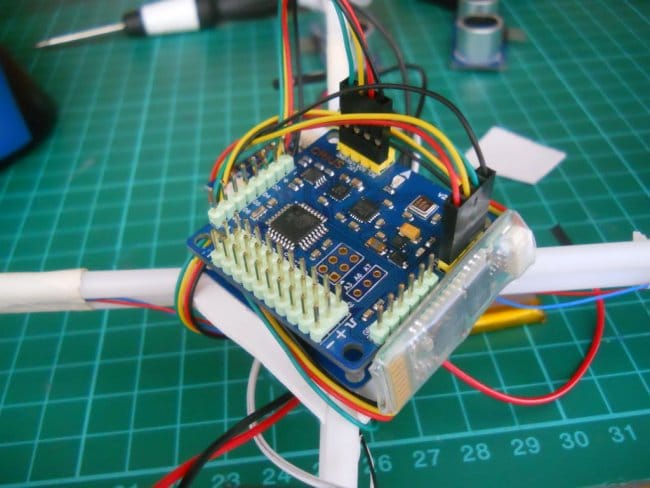
Шаг 13: Программирование чипа
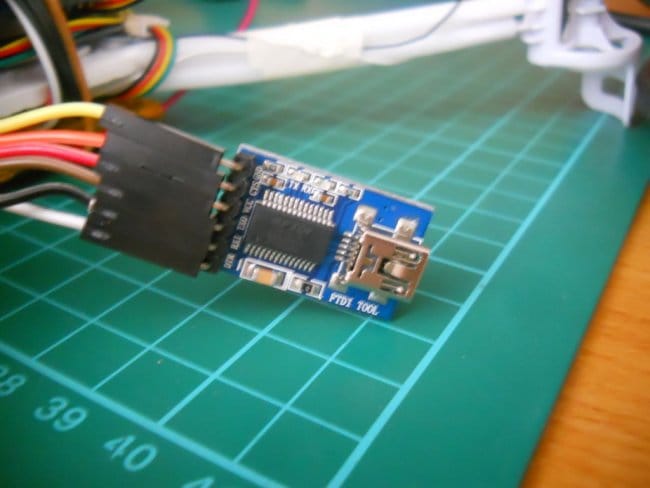
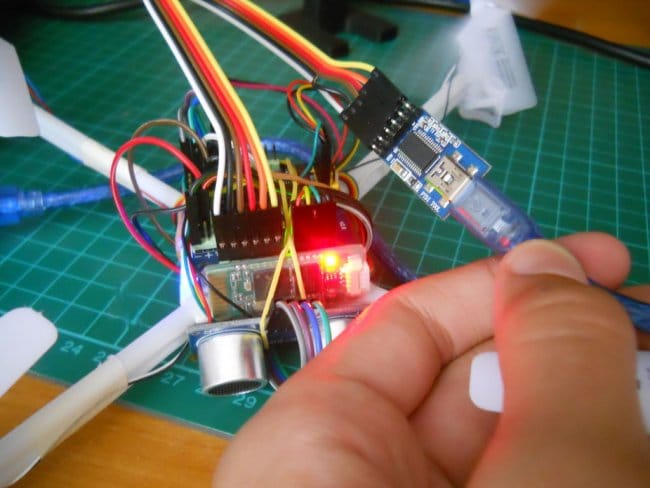
Вы должны использовать модуль Serial FTDI для программирования чипа. В комплект чипа входит модуль программатора.
Шаг 14: Программное обеспечение

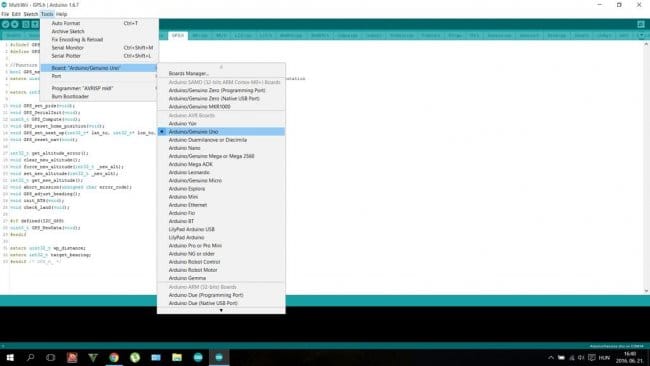
Мастер не знает, загружено ли программное обеспечение на чип или нет, но здесь он объясняет, что делать. Сначала загрузите официальную библиотеку MultiWii на свой компьютер. Извлеките файл .zip, затем откройте файл MultiWii.ino. Выберите «Arduino / Genuino UNO» и загрузите его на свой чип. Теперь ваш микроконтроллер имеет все предустановленные функции. Гироскоп, свет, Bluetooth и даже маленький ЖК-дисплей (который не используется в этом проекте) работает с загруженным кодом. Но этот код можно использовать только для проверки работоспособности модулей. Попробуйте наклонить дрон, и вы увидите, что моторы будут вращаться из-за гиросенсора. Нам следует изменить код контроллера, чтобы дрон следовал за телефоном.
Если вы можете запрограммировать Arduino или следовать инструкциям мастера, то сможете создать свой собственный дрон, который будет следовать за вами повсюду.
GitHub — ссылка на программное обеспечение
Шаг 15: Изменение кода
Мастеру пришлось изменить код датчиков и контроллера, который давал подсказки для ATMega328, но теперь модуль Bluetooth выдает три GPS-координаты, и в зависимости от них движется дрон.
Шаг 16: Приложение для телефона
Мастер использовал приложение SensoDuino, которое можно загрузить из плей маркет гугла. Подключитесь к дрону через Bluetooth и включите GPS TX и регистрацию данных. После этого приложение телефона готово.
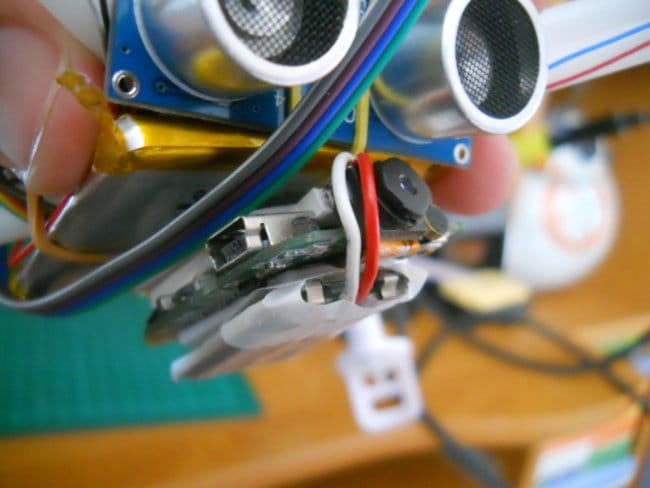
В качестве камеры использована дешевая китайская камера. Эта камера использовалась во многих проектах мастера и всегда показывала отличные результаты. Весит она всего 15 г и может снимать хорошее видео.
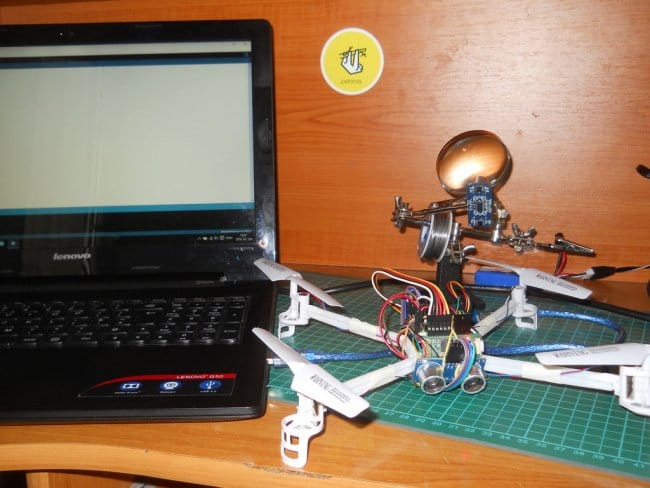
Шаг 18: Тестирование .



Расстояние соединения составило около 8 м, что более чем достаточно для такого беспилотника, как этот.
Источник
Дрон своими руками: Урок 1. Терминология.
Содержание
Введение
Предлагаем вашему вниманию серию учебных пособий предназначенных для того, чтобы помочь начинающему энтузиасту понять развивающееся беспилотное направление и сориентировать его в процессе создания собственного БПЛА с использованием готовых деталей. Используемая терминология и определения предназначены для того, чтобы дать читателю понимание каждого термина, а не его словарного определения. Несмотря на то, что многие слова могут иметь несколько значений, определение каждого используется в контексте БПЛА/Дроны.
Терминология
RTF (Ready to Fly/Готов к полёту) — беспилотник, который доходит до пользователя в полностью собранном виде со всеми необходимыми деталями. Просто зарядите аккумулятор и летите!
BNF (Bind and Fly/Привяжи и лети) — беспилотник поставляется полностью собранным и включает в себя приёмник. Пользователю нужно только выбрать совместимый передатчик и «привязать» его к приёмнику.
ARF (Almost Ready to Fly/Почти готов к полёту) — беспилотник, который поставляется в разобранном виде почти со всеми частями необходимыми для полёта. Такие компоненты как, пульт управления и приёмник, могут отсутствовать.
DIY (Do It Yourself/Сделай сам) — в настоящее время такую сборку называют «кастомной». Как правило подразумевает использование деталей от разных поставщиков и создание или модификацию деталей.
БЛА (БПЛА)/UAV — Беспилотный Летательный Аппарат/Unmanned Aerial Vehicles (любой).
Дрон (Drone) — синоним БПЛА (UAV). Термин «дрон» наиболее применим для военной сферы, тогда как «БПЛА» для хобби.
Мультиротор (Multirotor) — БПЛА с несколькими моторами.
Трикоптер (Tricopter) — БПЛА, который имеет три мотора/пропеллера и как правило три опорных луча.
Квадрокоптер (Quadrocopter) — БПЛА, который имеет четыре мотора/пропеллера и четыре опорных луча. Обычно это конфигурация «+» (где, перед беспилотника обращен к одному из лучей) или «X» (где, перед беспилотника обращен между двумя опорными лучами).
Гексакоптер (Hexacopter) — БПЛА, силовая установка которого имеет шесть моторов/пропеллеров.
Октокоптер (Octocopter) — БПЛА, силовая установка которого имеет восемь моторов/пропеллеров.
Spyder — БПЛА типа «Spyder (Паук)» (обычно квадрокоптер или гексакоптер) у которых опорные лучи располагаются относительно друг друга не симметрично, если смотреть сверху.
V-Tail — БПЛА, который имеет четыре луча, из которых два задних располагаются под углом, образующим «V».
Размер (Size) — «Размер» обычно указывается в миллиметрах (например, 450мм) и представляет наибольшее расстояние между двумя моторами на беспилотном летательном аппарате. Размер также может определить «класс» БПЛА (микро, мини и т.д.).
X4/X8 — конфигурации БПЛА с четырьмя опорными лучами; Конфигурации «X4» имеют по одному мотору на конце каждого луча, тогда как «X8» имеют по два мотора на одном луче (где, один направлен вверх, другой – вниз).
Y3/Y6 — конфигурации БПЛА с тремя опорными лучами; Конфигурации «Y3» имеют по одному мотору на конце каждого луча, тогда как «Y6» имеют по два мотора на одном луче (где, один направлен вверх, другой – вниз).

Механика
CG (Center of Gravity/Центр тяжести) — это точка на воздушном судне, где вес распределён одинаково по всем сторонам.
Рама (Frame) — рама это своего рода «скелет» воздушного судна, на котором крепятся все детали. Простые рамы имеют моторы, подключенные к алюминиевым или другим лёгким профилям («лучам»), которые затем соединяются с центральным корпусом.
Оболочка/Корпус (Shell) — эстетическое/функциональное покрытие, используемое для улучшения сопротивления элементам, а иногда и для улучшения аэродинамики. Некоторые серийно выпускаемые БПЛА имеют только пластиковую оболочку, которая также выступает в качестве «рамы».
Посадочные опоры (Landing gear) — как правило, многомоторный дрон в отличии от самолёта не имеет колёс, их роль выполняют посадочные опоры. Опоры предотвращают перемещение по земле и снижают общий вес.
Retract/Retractable — обычно относится к шасси, которое имеет два положения: одно для посадки и взлёта, а другое, которое занимает меньше места или улучшает обзор во время полёта.
G10 — этот материал обычно используют вместо углеродного волокна для изготовления каркаса БПЛА, поскольку он не только очень жёсткий и лёгкий, но значительно дешевый.
Защита пропеллеров (Propeller guards/Prop Guards) — это материал, который окружает пропеллер, чтобы препятствовать контакту несущего винта с другими объектами. Защита реализована как средство обеспечения безопасности и способ минимизировать повреждение беспилотника.
Разъёмы/Коннекторы (Connectors) — для соединения и разъединения проводов на их концах применяют разъёмы. Распространённые разъёмы для батарей – «Deans» и «XT60», в то время как разъёмы для контроллера полёта и датчиков расположены с интервалом 0.1 дюйма (2.5мм).
Хомут (Clamp) — «Tube clamp/Трубный хомут» это устройство, обычно используемое на круглой трубе для соединения её с другим устройством (например, с креплением мотора или корпусом БПЛА).
Демпферы (Dampeners) — формованные резиновые детали, используемые для минимизации вибрации, передаваемой по беспилотнику.
Светодиоды (LED — Light Emitting Diode) — применяются с целью обозначить БПЛА в полёте, особенно ночью или в условиях слабого освещения.

Силовая установка
Тяга/Thrust — это сила, которую может обеспечить конкретный мотор и пропеллер (при определенном напряжении). Обычно измеряется в килограммах (кг/kg) или фунтах (Фунтах/Pounds/Lbs).
BEC — (Battery Eliminator Circuit/Преобразователь бортового питания) встроен в ESC (регулятор напряжения), который может обеспечить регулируемое 5В напряжение постоянного тока для любой электроники, которая в этом нуждается.
ESC (Electronic Speed Controller/Электронный регулятор скорости) — устройство, которое подключается к аккумулятору, мотору и контроллеру полёта и контролирует скорость вращения мотора.
Мотор/Motor — то, что применяется для вращения пропеллеров; в небольших беспилотных летательных аппаратах чаще всего используется коллекторный (Brushed) мотор, тогда как для более крупных беспилотных летательных аппаратов – бесколлекторный (Brushless).
Лопасти/Blades (лопасти пропеллера) — аэродинамическая поверхность создающая подъёмную силу. Как правило пропеллер имеет от двух до четырёх лопастей, которые могут быть как фиксированными, так и складными.
Пропеллер/Propeller (Несущий винт/сокр. Проп) — пропеллеры обеспечивают тягу и больше похожи на те, что используются в самолётах.
Адаптер пропеллера/Prop Adapter — устройство, используемое для сопряжения пропеллера с мотором.
Пропсейвер/Prop Saver — тип втулки, которая устанавливается на верхней части используемого мотора и заменяет адаптер пропеллера/Prop Adapter. В случае аварии часть пропсейвера идёт в расход, чтобы сохранить целостность пропеллера.
PCB (Printed Circuit Board/Печатная плата) — стеклопластиковая пластина, на которой припаяно множество компонентов. Многие электронные продукты имеют печатную плату.
LiPo (Lithium Polymer/Литий-Полимерный) — является наиболее распространенной батареей, используемой в дронах и беспилотных летательных аппаратах из-за её малого веса (относительно ёмкости хранения), а также высокой скорости разряда тока. Помимо LiPo на рынке доступны и другие типы литиевых батарей (LiFe, LiMn, LiOn и т.д.).
Распределение питания/Power Distribution — чтобы питать различное множество устройств, используемых в БПЛА, ресурсы батареи должны быть распределены, и именно здесь в игру вступает распределение питания (плата или кабель). Задействует одну положительную и отрицательную клеммы батареи и предоставляет множество различных клемм/точек подключения, от которых другие устройства (работающие на том же напряжении) могут получать питание.
Сервопривод/Servo — тип привода, который при правильном сигнале может перемещаться в определенное угловое положение.

Управление
База (Base)/Земля (Ground)/Станция управления (Control Station) — вместо (или в дополнение) к ручной аппаратуре управления (передатчику) используется станция (обычно в корпусе или на штативе) для размещения/интеграции необходимых компонентов, используемых для управления БПЛА. Может включать передатчик, антенну(ы), видеоприёмник, монитор, аккумулятор, компьютер и другие устройства.
Привязка/Binding — термин «привязка» относится к настройке портативного передатчика, чтобы он мог связываться с приёмником; если передатчик комплектуется с приёмником, эту настройку должны сделать на заводе.
Канал/Channel — количество каналов в передатчике относится к числу отдельных сигналов, которые он может передавать.
Контроллер полёта/Flight Controller — это то, что считается «мозгом» беспилотного летательного аппарата, который обрабатывает все поступающие данные, расчёты и сигналы. Ядром контроллера полёта часто является программируемый «микроконтроллер». Контроллер полёта может иметь несколько датчиков на борту, включая акселерометр, гироскоп, барометр, компас, GPS и т.д. Если контроллер полёта имеет возможность управлять самолётом самостоятельно (например, для полёта по заданным GPS координатам), его можно считать «автопилотом».
Соединительные жгуты/Harness — как правило это относится к «жгуту проводов», в который входят провода соединяющие приёмник с контроллером полёта (и иногда с другими устройствами).
ВЧ/ОВЧ/УВЧ (HF/VHF/UHF) — название частот, где ВЧ (HF) — высокие (High Frequency); ОВЧ (VHF) — очень высокие (Very High Frequency) и УВЧ (UHF) — ультра высокие (Ultra High Frequency). Измеряются в герцах (Гц/Hz).
Приёмник/Receiver — это то, что участвует в процессе обработки дистанционно полученной информации.
Sketch/Code — программа, которая загружается на контроллер полёта беспилотника (аналогично мыслительному процессу).
Передатчик/Радио (Transmitter/Radio) — это то, что генерирует управляющий сигнал(ы) и дистанционно передаёт приёмнику.

Сенсоры/Ориентация
Компас/Compass — магнитный компас может обеспечить навигацию по сторонам света (север/юг/восток/запад).
Инерциальный измерительный блок/IMU (Inertial Measurement Unit) — объединяет в себе сразу два сенсора акселерометр и гироскоп.
Акселерометр/Accelerometer — измеряет линейное ускорение по 1-3 осям. Обычно измеряются в «g/же». Акселерометр может обеспечить ориентацию вашего дрона относительно земли.
Гироскоп/Gyroscope — гироскоп измеряет угловое ускорение по 1-3 осям. Единицы измерения, обычно, в градусах в секунду в квадрате.
Магнитометр/Magenetometer — иногда используется в недорогой робототехнике для определения направления компаса.
Барометр/Высотомер/Давление (Barometer/Altimeter/Pressure) — используется для обеспечения обратной связи относительно занимаемой высоты БПЛА. Он измеряет давление, а, так как давление изменяется с высотой, то беспилотник может «знать/определять» занимаемую высоту.
Трубка Пито/Pitot Tube — устройство, которое измеряет скорость воздуха.
Регистратор полёта/Flight Recorder — записывает значения датчиков БПЛА. Эта функция иногда может быть интегрирована в контроллер полёта.
GPS/Система глобального позиционирования — спутники, вращаясь вокруг планеты, посылают сигналы, которые принимаются GPS антенной и отправляются для обработки GPS приёмником с целью предоставления географических координат.
Антенна/Antenna — это то, что фактически принимает или отправляет сигнал на и от БПЛА (сам сигнал генерируется блоком передатчика). Они бывают разных типов, а также разделяются на направленные (сильные в одном направлении) и всенаправленные.
Крен/Roll — поворот воздушного судна вокруг его продольной оси.
Тангаж/Pitch — угловое движение БПЛА относительно горизонтальной плоскости, или другими словами, вращение воздушного судна относительно оси от крыла до крыла.
Рыскание/Yaw — угловые движения воздушного судна относительно вертикальной оси.

Видео
FPV (First Person View/Вид от первого лица) — термин применим к полёту от первого лица, когда беспилотник оборудован FPV камерой, а пользователь используя FPV монитор/FPV очки получает видео с этой камеры в режиме реального времени.
VR (Virtual Reality/Виртуальная реальность) очки/Glasses/Goggles — предоставляют пользователю более «захватывающий» опыт.
Подвес/Gimbal — устройства, которые сопряжены с камерой и как правило приводятся в действие с помощью серводвигателя или бесколлекторного мотора постоянного тока. Подвес — это то, что может стабилизировать камеру в полёте.
GoPro — cерия экшн камер GoPro широко использующихся для съёмки и/или передачи видео.
LCD/ЖКД (Liquid Crystal Display/Жидкокристаллический дисплей) — это тип дисплея/монитора, используемого для отображения изображения, полученного видеоприёмником.
OSD (On Screen Display/На дисплее) — отображает данные полёта на дисплее/мониторе, которые отправляются с БПЛА (например: высота, спутниковые координаты местоположения и т.д.).

Вы действительно хотите собрать БПЛА с нуля?
Каким должен быть беспилотник (собранным/или кастомным) зависит от того, насколько вы хотите узнать об этой области. Создание беспилотника с нуля может быть довольно сложным и даже опасным процессом. Если вы предпочитаете просто и без заморочек «подняться в воздух», в порядке возрастания сложности рекомендуется следующее:
Игрушка/Toy
- Мультироторные игрушки становятся все более популярными. Большинство из них маленькие и могут уместиться на ладони, но встречаются и крупные, такие, как А.R. Drone Parrot. Игрушечными многомоторными беспилотниками не всегда легко управлять, но они более устойчивы к авариям/крашам. Игрушки, как правило, меньше по размеру, а роль рамы выполняет эстетическая оболочка.
- В комплект «Ready To Fly/Готов к полёту» входят все детали, необходимые для комплектного БПЛА. Сюда входит сам БПЛА (чаще всего предварительно собранный и готовый к работе), аппаратура управления, аккумулятор и зарядное устройство. Аппарат откалиброван и должен летать с относительной легкостью. Тем не менее они имеют ограниченный предел прочности, и очередная авария может повредить систему настолько, что будет лучшим, просто купить новый беспилотник, а не пытаться его отремонтировать.
- Комплект «Almost Ready to Fly/Почти готов к полёту» это комплект, в который входят полностью собранные: рама, моторы и большинство «основных» частей (в некоторых случаях может потребоваться сборка нескольких частей/деталей, в основном с целью облегчения доставки). Обычно ARF комплектация требует дооснащения передатчиком/приёмником, реже, батареей и зарядным устройством. Некоторые ARF комплекты не включают в себя сам контроллер полёта. Возможно, пользователю потребуется выполнить некоторую калибровку из-за необходимости дооснащения дополнительными деталями. Комплект BNF не предлагается, так как не все передатчики и приёмники совместимы друг с другом.
БПЛА набор/UAV Kit
- Набор обычно включает в себя большинство важных деталей, необходимых для создания БПЛА, но при этом могут отсутствовать контроллер полёта, передатчик/приёмник, аккумулятор и зарядное устройство. Разные комплекты имеют разное содержимое, поэтому важно точно знать, что входит в комплект и какие дополнительные компоненты/детали понадобятся. Содержимое комплекта должно быть совместимо друг с другом.
Сборка с нуля/Custom
- Кастомная сборка это то, где пользователь комбинирует различные изделия от разных производителей и заставляет их работать вместе. Такой подход требует понимания, какие компоненты будут необходимы для создания беспилотного летательного аппарата, и будут в центре внимания в этой серии статей.
Вы заметили недостающие термины, которые будут полезны? Не стесняйтесь добавлять их в комментариях ниже.
Источник