- Лазерный гравер из DVD версия 2.0
- Лазерный гравер из dvd своими руками
- Необходимые детали и материалы:
- Порядок расчета разрешающей способности шагового двигателя dvd привода
- Подготовка слайдера
- Сборка направляющих для оси Y
- Сборка направляющих для оси X
- Подключение шаговых двигателей
- Комбинирование осей X и Y
- Электроника
- Детали используемые для драйвера:
- Настройка микро шага для каждой оси.
- MS0 MS1 MS2 Разрешение микрошагов.
- Сборка электроники в кадр
- Регулировка тока шагового драйвера
- Готовимся!
- Прошивка GRBL
- Программное обеспечение для отправки G-кода
- Настройка системы
- Вот самая трудная часть проекта
- Настройка для GRBL
- Пользовательский интерфейс LaserGRBL.
Лазерный гравер из DVD версия 2.0

Снова здравствуйте. Не так давно я выкладывал инструкцию по созданию лазерного гравера из CD или DVD-rom. Первая версия лазерного гравера была полностью рабочей, но не лишена ряда проблем. Во-первых, я использовал драйвер двигателя L9110S, тем самым лишился возможности использовать микрошаг двигателя, и как следствие было ограничено разрешение гравировки. Также была проблема несовместимости программного обеспечения гравера со стандартными программами работы с граверами. Во–второй версии, я убрал все недостатки, и гравер стал соответствовать стандартам и также слушаться G-кодов. Основа осталась такая же, изменилась электрика и программное обеспечение. И я представляю вам инструкции по переоборудованию предыдущего или созданию нового лазерного гравера.
— DVD-ROM или CD-ROM
— Фанера толщиной 10 мм (можно использовать и 6мм)
— Саморезы по дереву 2.5 х 25 мм, 2.5 х 10 мм
— Arduino Uno (можно использовать совместимые платы)
— Arduino CNC Shield v3
— Лазер 1000 МВт 405nm Blueviolet
— Драйвера шагового двигателя A4988 с радиаторами 2 шт.
— Блок питания на 5В (я буду использовать старый, но рабочий компьютерный блок питания)
— Транзистор TIP120 ил TIP122
— Резистор 2.2 kOм, 0.25 ВТ
— Соединительные провода
— Коннектор 2.54 мм Dupont
— Элетролобзик
— Дрель
— Сверла по дереву 2мм, 3мм, 4мм
— Винт 4 мм х20 мм
— Гайки и шайбы 4 мм
— Паяльник
— Припой, канифоль
Шаг 1 Собираем корпус, механику и готовим блок питания.
Здесь делаем все в точности, как в первом, втором и третьем шагах инструкции «Лазерный гравер из старых DVD-Rom».
Четвертый шаг можно не делать, так как нам не понадобится джойстик. Все команды будем отправлять через терминал.
Шаг 2 Подготовка двигателей.
Про то как извлечь шаговые двигатели и каретки вы прочитали в первой статье. Так, как и там припаиваем провода к двигателям. С другого конца проводов необходимо заклепать коннекторы Dupon:

Если есть, удобно использовать пластиковый корпус для них, на четыре провода. Если нет, том можно, как и я просто одеть термоусадку на каждый из проводов.
Шаг 3 Собираем электрику.
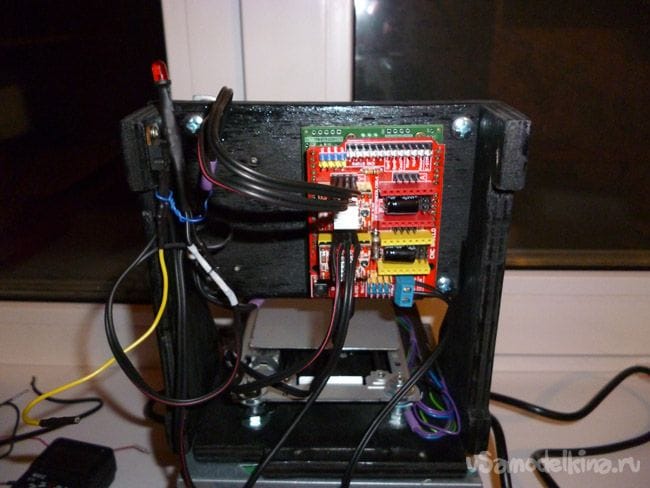
Мозг нашего гравера – Arduino Uno.

Устанавливаем ее в задней части гравера:

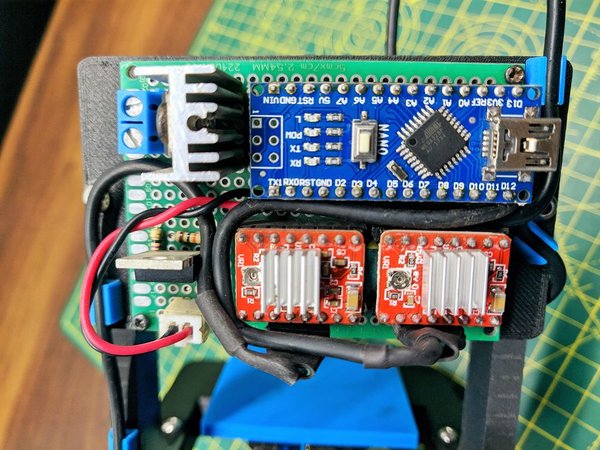
Одной из важнейших деталей является Arduino CNC Shield. Мы будем использовать третью версию данной платы расширения. Благодаря ей мы значительно уменьшим количество проводов и упростим сборку гравера:
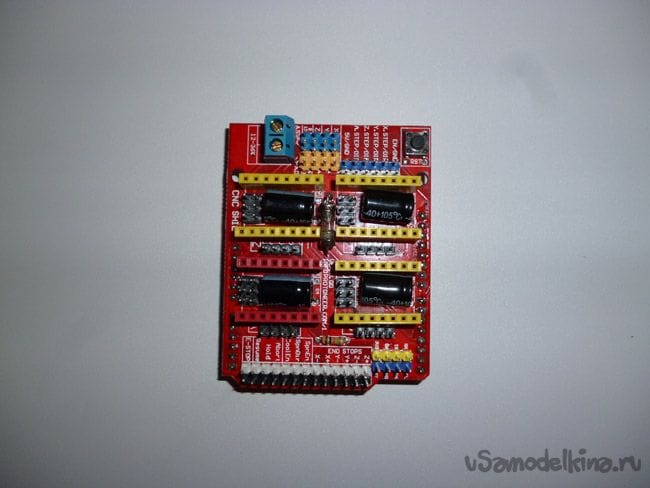
И с обратной стороны:

Ставим Arduino CNC Shied v3 сверху Uno:
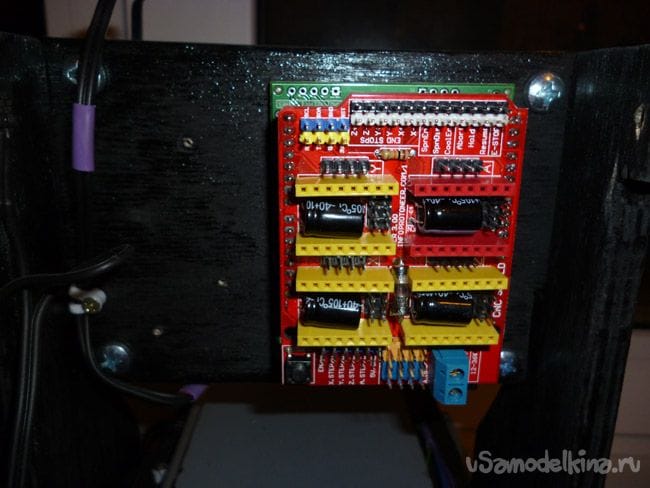
В комплекте с платой расширения должны идти перемычки. До установки драйвером, необходимо установить перемычки на оси X и Y. А именно, должны быть установлены перемычки MS0, MS1 и MS2 на осях X и Y. Таким образом мы установим микрошаг равный 1\16. Если запутались небольшая инструкция по данной плате расширения:
Дравера выглядят так:
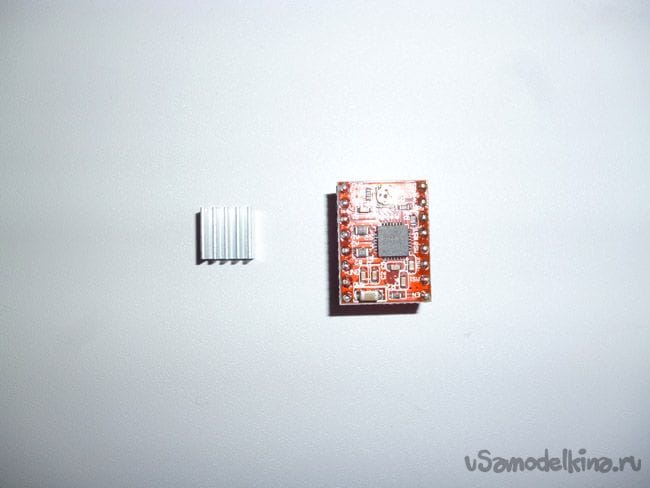

Вначале устанавливаем радиаторы на драйвера:

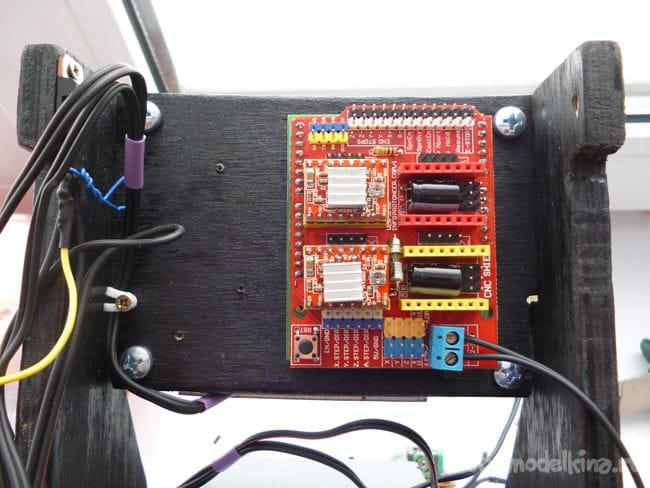
А затем ставим их на места для осей X и Y. Обратите внимание на положение драйвера. Так как его можно легко установить не верно. Ключевая ножка EN на драйвере должна совпадать с тем же гнездом на плате расширения:
Я рекомендую покупать сразу комплект, состоящий из Arduino Uno, CNC Shield и драйверов A4988 с радиаторами. Так получается дешевле и не придется ждать, пока подойдет следующий компонент.
Купленный нами готовый лазер с драйвером и радиатором охлаждения, потребляет до 500 mA. Его нельзя напрямую подключать к Arduino. Чтобы решить эту проблему, возьмет транзистор TIP120 или TIP122. Резистор 2.2 kOm включаем в разрыв между Base транзистора и pin 11 Arduino. На CNC Shield этот pin обозначен как Z+. Это не опечатка. Дело вот в чем. Забегая на перед, скажу, что мы будем работать с прошивкой GBRL 1.1. CNC Shield v3 делался для более ранней версии этой прошивки. В версии GBRL 1.1 разработчики решили переделать нумерацию портов, и поэтому она отличается от того, что написано на плате. А именно, поменяли местами Z+ (D12) и Spn_EN (D11). Шпиндель подключили к D11, который является ШИМ портом, для управления оборотами двигателя, или мощностью лазера в нашем случаем. Картинка с измененными пинами:
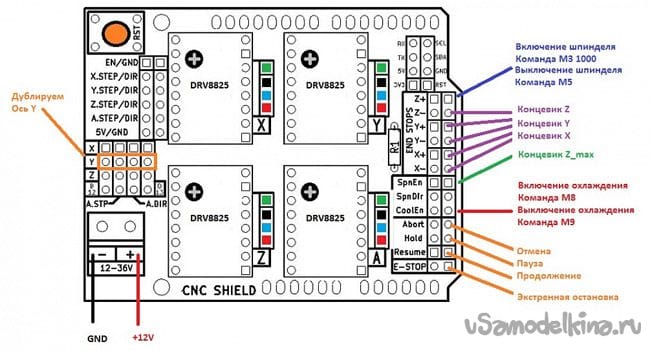
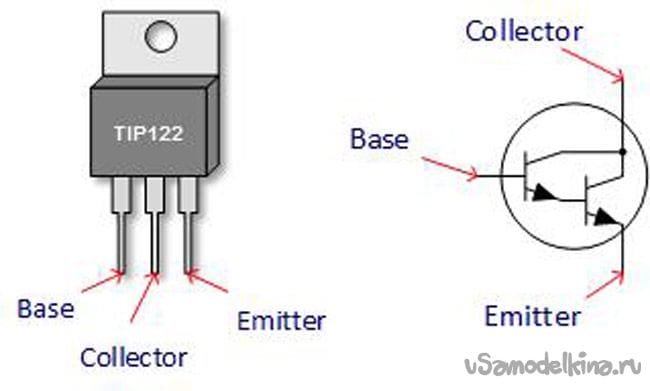
Base – R 2.2 kOm – pin 11 Arduino (Z+ CNC Sheild)
Collector – GND Лазера (Черный провод)
Emitter – GND (Общий блока питания)
+5 лазера (красный провод) — +5 блока питания
Схема не сложная, поэтому паяем все на весу, заизолировав провода и ножки транзистора, вещаем его сзади, на боковой части

Настройка GBRL прошивки не самая легкая задача, особенно для новичка. А с лазер, как и спички, детям не игрушки. Даже при попадании отраженного луча, можно серьезно повредить глаз. Поэтому я рекомендую работать с лазером только в защитных очках, а на время тестов и настройки, подключить вместо лазера обычный светодиод. Цвет не имеет значения. Включив в разрыв плюсового провода диода подходящий резистор, подключаем светодиод вместо лазера:

Защитные очки и проверочный диод сведут к минимуму случайные проблемы с гравером.
Шаг 4 Настройка ограничения тока двигателей.
Настройка силы тока необходима для снижения шума при работе на завышенном токе, избавления от сдвига при низком токе, а также для снижения нагрева шагового двигателя.
Минусовой провод мультиметра соединяем с контактом GND, плюсовой прижимаем к корпусу подстроечного резистора на драйвере. Маленькой отверткой крутим подстроечный резистор замеряя напряжение Vref. Таким образом мы выставим правильный ток для нашего драйвера шагового двигателя.
Формула Vref для A4988 зависит от номинала резисторов, установленных на них. Как правило это R100.
Vref = Imax * 8 * (RS)
Imax — ток шагового двигателя
RS — сопротивление резистора.
В нашем случае:
RS = 0,100.
Рекомендованная сила тока шаговых двигателей равна 0,36А. Но я предпочитаю его немного увеличить.
Imax = 0.4
Vref = 0,5 * 8 * 0,100 = 0,32 В.
Шаг 5 Заливка GBRL 1.1.
Удобнее всего записывать в Arduino Uno готовый HEX файл прошивки.
Для этого необходима программа XLoader:
Запускаем программу. Выбираем скачанный ранее HEX файл. Ниже выбираем из списка наш контролер, а именно Uno(ATmega328). Далее выбираем com порт к которому подключена Arduino. Ставим скорость 115200 и нажимаем Upload. Дождавшись окончания заливки, можно перейти к проверке и настройке.
Шаг 6 Настройка параметров.
Заложенные в прошивке параметры отличаются от параметров нашего станка. Для настройки используется окно терминала. Можно использовать любой, который вам нравиться. Я предпочитая Arduino IDE. Скачиваем ее с официального сайта проекта:
Библиотек никаких не требуется, от Arduino IDE нам нужен только терминал. Во вкладке Инструменты выбираем нашу плату – Arduino Uno, затем выбираем com порт, к которому она подключена. После этого запускаем терминал, находящийся во вкладке Инструменты – Монитор порта. В окне терминала ставим параметр CR (возврат каретки) и скорость 115200 бод. Должна прийти следующая строка:
Если вы ее увидели, значит прошивка стала удачно и можно перейти к настройке. Итак, мы используем шаговые двигатели от DVD или CD приводов. Они именуются как PL15S020 или совместимые с этим:
Для просмотра текущих параметров прошивки введите:
Данный двигатель имеет 20 шагов на оборот. Шаг винта — это расстояние которое проходит каретка за один оборот, в нашем случаем, 3 мм. Рассчитываем количество шагов на 1 мм: 20/3=6,6666666666667 шага на 1мм. На драйверах a4988 мы установили микрошаг 16. Значит, 6,6666666666667*16=106,67 шага на 1 мм. Записываем эти данные в прошивку. Для этого в окне терминала вводим:
Последний параметр не обязателен, он для оси Z, но так понятнее потом просматривать параметры. Затем включаем режим лазера командой:
Устанавливаем максимальную мощность лазера равной 255:
Для проверки лазера (лучше вначале подключить светодиод) вводим команду:
Отключаем лазер командой:
Затем задаем максимальный размер выжигания. Для нашего гравера это 38 х 38 мм:
Опять последний параметр не обязателен, он для оси Z.
Выкладываю рабочие параметры нашего гравера, чтобы вы могли сравнить:
Шаг 7 Подготовка изображения.
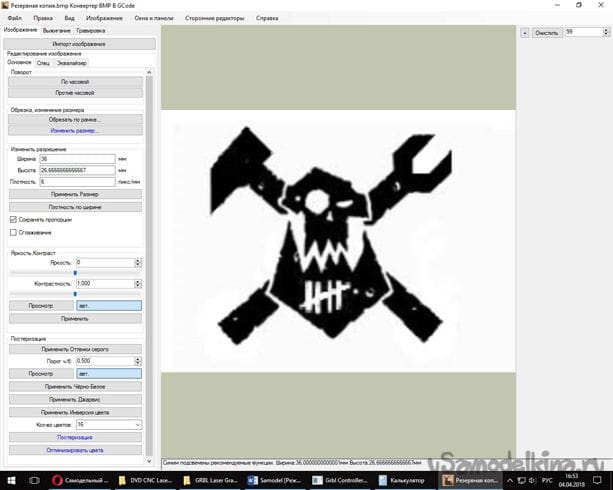
Чтобы выжечь что-нибудь необходимо подготовить выбранную вами картинку, а именно перевести ее в G-код. Для этого будем использовать программу CHPU:
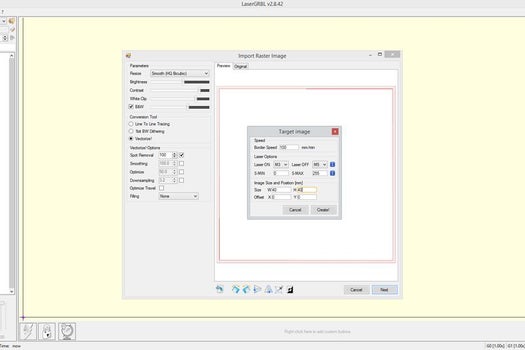
Скачиваем и отрываем программу. Нажимаем «Импорт изображения» и выбираем вашу картинку. В разделе «Изменить разрешение» ставим «Ширину» и «Высоту» максимум 38 мм. «Плотность» можно попробовать разную, на мой взгляд оптимально 6:
Переходи во вкладку «Выжигание». Выбираем «ВКЛ на черном». В разделе «Предварительные команды» должны быть следующие записи, без пояснений в скобках:
Скорость выжигания можно попробовать разную. Для пластика F100 достаточно, для дерева может понабиться меньше. Нажимаем «Сохранить G код» и указываем место для хранения. Важно! Разрешение следует выбирать «.nc».
Шаг 8 Выжигание.
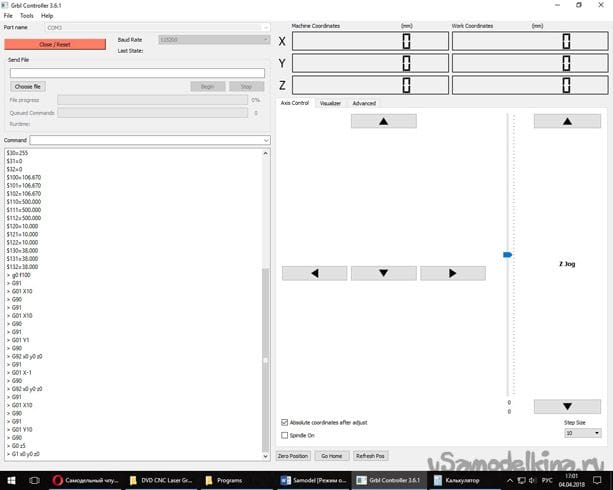
Для выжигания и управления гравером будем использовать программу GrblController:
Скачиваем и устанавливаем ее. Нажимаем «Open». Проверив что все работает, используя стрелочки и команду включения лазера, выбираем сохраненный вами файл и отправляем на прожиг, нажав «Begin»:
Видео работы гравера:
Источник
Лазерный гравер из dvd своими руками

















- Просмотрено 29972
- Скачано 2329
- Толщина слоя (разрешение) 0.20 мм
- Наличие поддержек Нет
- Заполнение 25 %
- Толщина вертикальной стенки (периметр) 0 мм
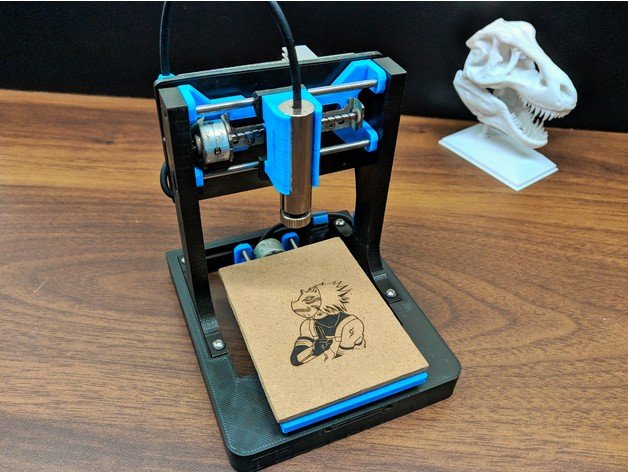
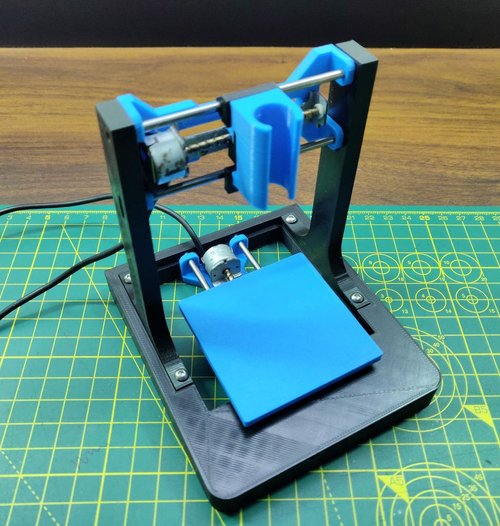
Это версия лазерного гравера и резака для бумаги с ЧПУ, на основе Arduino, используя старый dvd-привод и лазер мощностью 250 мВт
Необходимые детали и материалы:
- Arduino Nano (с USB-кабелем)
- 2x DVD приводной шаговый механизм
- 2 модуля драйвера шагового двигателя A4988 (или экран GRBL)
- Лазер 250 мВт с регулируемой линзой (или выше)
- 12В 2Amp минимум питания
- 1x IRFZ44N N-CHANNEL Mosfet
- 1х 10к резистор
- Резистор 1x 47 Ом
- 1x регулятор напряжения LM7805 (с радиатором)
- Пустая печатная плата
- Головки Male и Female
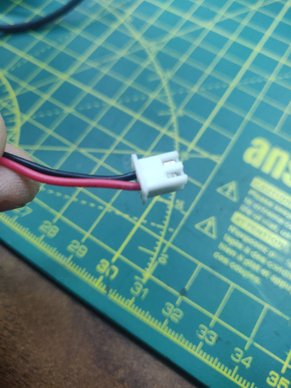
- 2,5 мм JST XH-Style
- 2-контактный разъем
- 1x 1000 мкФ 16 В конденсатор Перемычка кабелей
- 8x маленьких неодимовых магнитов (которые я спас от механизма линз DVD)
- 1x 2-контактный штекер в винтовом разъеме клеммной колодки
- Лента транспортная (100 мм)
- Супер клей
- 6x винтов M3x12
- 8x M2x5 винтов
- Лазерные защитные очки.
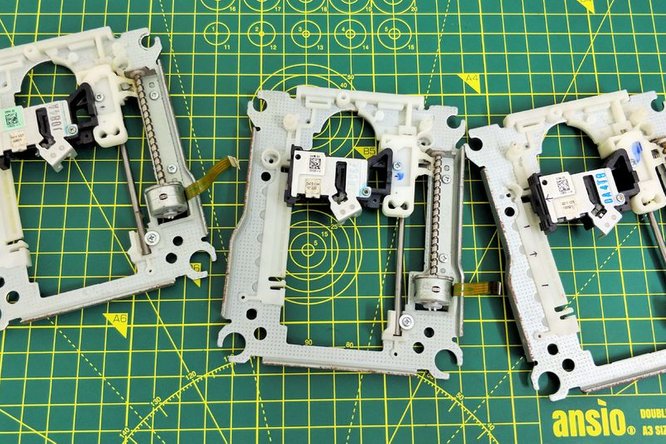
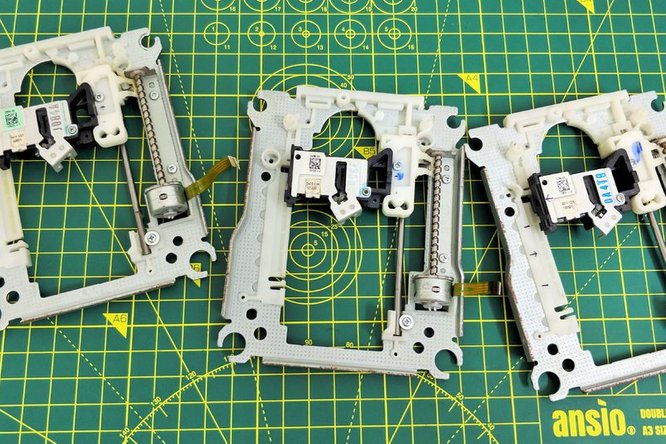
Потребуются два механизма привода DVD, один для оси X и второй для оси Y.
Используя небольшую отвертку с головкой Phillips, удалили все винты и отсоединенный шаговый двигатель, скользящие направляющие и толкатель.
Шаговые двигатели представляют собой 4-контактный двухполюсный шаговый двигатель.
Небольшой размер и низкая стоимость DVD-мотора говорит о том, что вам не стоит ожидать высокого разрешение мотора. Это обеспечивается ведущим винтом. Кроме того, не все такие двигатели делают 20 шагов / 24 об., также является общей спецификацией. Вам просто нужно протестировать ваш двигатель, чтобы убедиться, на что он способен.
Порядок расчета разрешающей способности шагового двигателя dvd привода
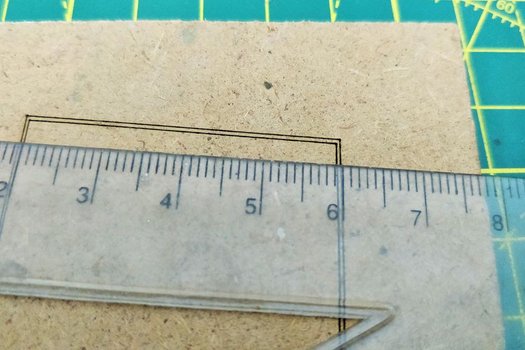
Чтобы измерить разрешение шагового двигателя привода CD / DVD, нужен цифровой микрометр. Расстояние вдоль винта было уже измерено. Общая длина винта промерена с помощью микрометра, которая оказалась 51,56 мм. Далее нужно определить значение отведения, которое представляет собой расстояние между двумя соседними резьбами на винте. Потоки были рассчитаны на 12 нитей в пределах этого расстояния. Отвод = расстояние между соседними нитями = (общая длина / количество нитей = 51,56 мм) / 12 = 4,29 мм / об. Угол шага составляет 18 градусов, что соответствует 20 шагам / оборот. Теперь, когда вся необходимая информация доступна, разрешение шагового двигателя можно рассчитать, как показано выше: Разрешение = (Расстояние между смежными нитями) / (N шагов / оборот) = (4 ,29 мм / оборот) / (20 шагов / оборот) = 0,214 мм / шаг. Что в 3 раза лучше требуемого разрешения, которое составляет 0,68 мм / шаг.
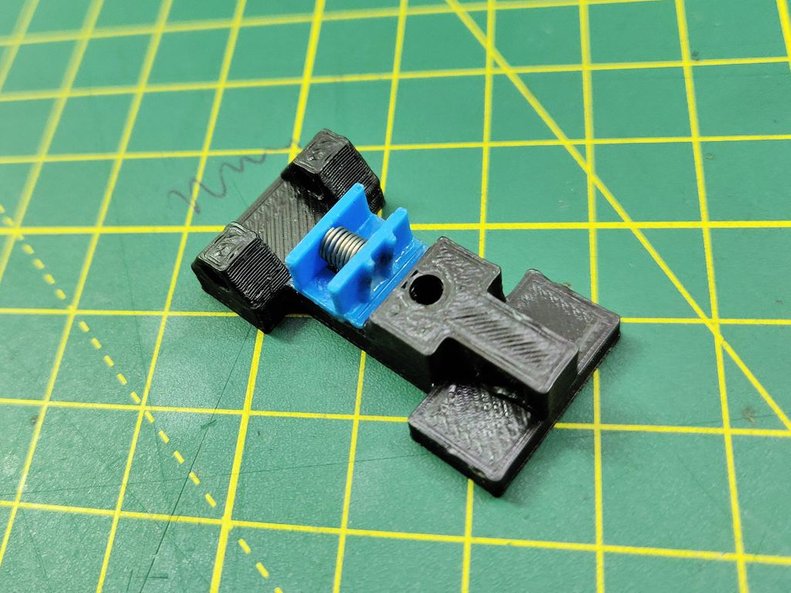
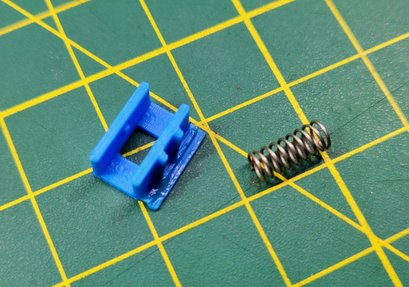
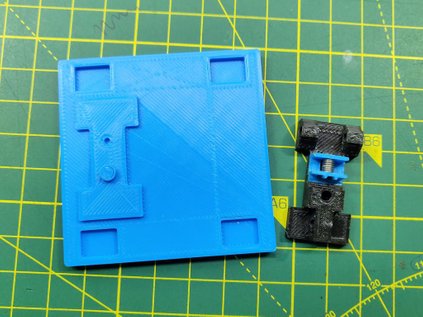
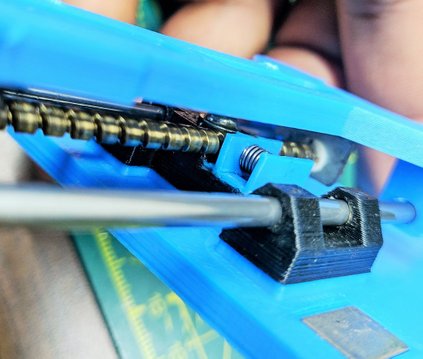
Подготовка слайдера
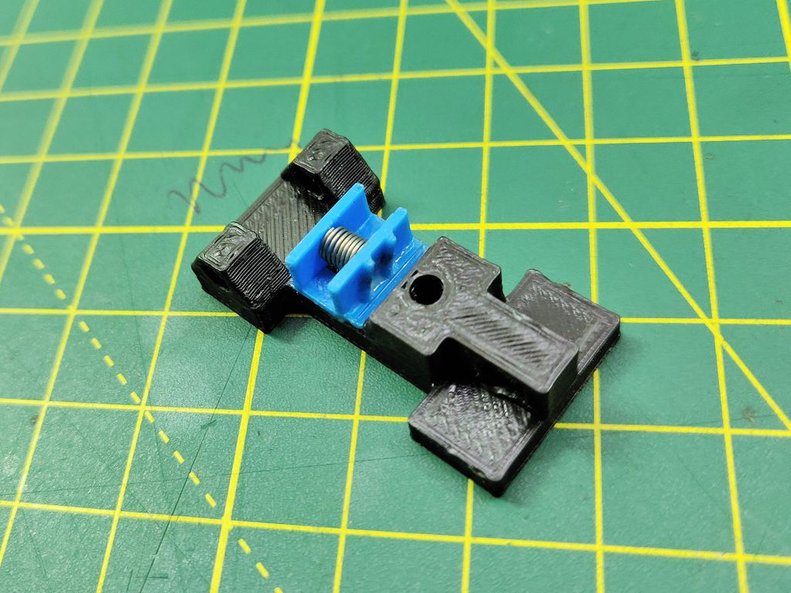
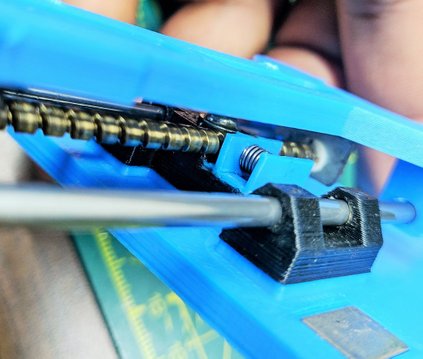
Используя супер клей, крепим ползунок и направляющую. Пружина прикреплена для поддержания натяжения между направляющей и ходовым винтом, чтобы избежать зазубрин.
Сборка направляющих для оси Y

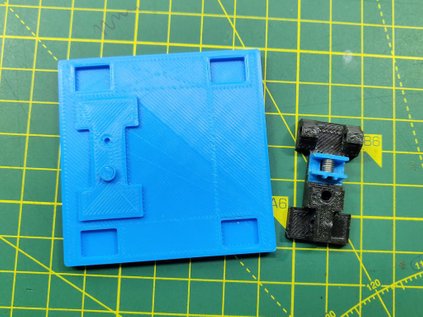
Перед установкой ползунка в основание, приклеим 4 маленьких неодимовых магнитов (из механизма линз DVD) на X-пластину. Эти магниты помогут удерживать заготовку в рабочей зоне.
Гладкий стержень сохранит механизм скольжения в целости и сохранности относительно основания.
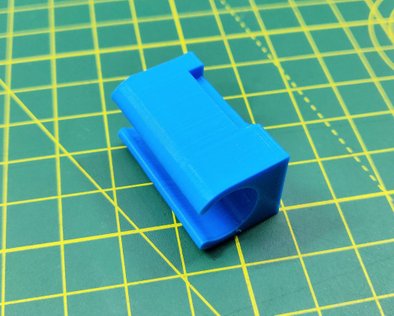
Сборка направляющих для оси X

Используя супер клей и винт, прикрепим направляющий механизм к корпусу лазера.
Затем прикрепите шаговый двигатель к месту, используя винты и вставьте гладкие стержни и направляющую часть в отверстия, учитывая, что ползунок движется свободно и не слишком сильно. Далее прикрепим к нему боковые стойки рамы.
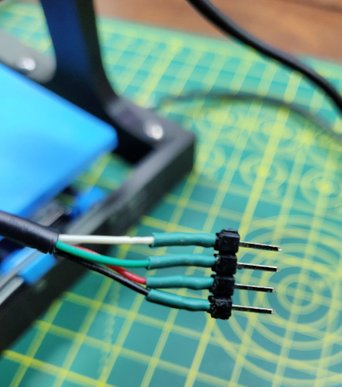
Подключение шаговых двигателей
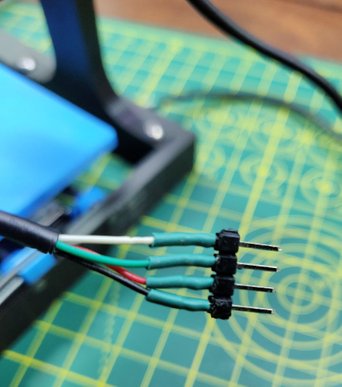
Для шаговых двигателей используем старый USB-кабель, потому что он имеет 4 провода внутри и крышку, так же он более гибкий и с ним легко работать.
Используя режим непрерывности в мультиметре, определите 2 катушки, катушку A и катушку B.
Я сделал 2 пары проволоки, выбрав цвета: одну пару для катушки A и вторую для катушки B.
Припаял их и использовал термоусадочную трубку.
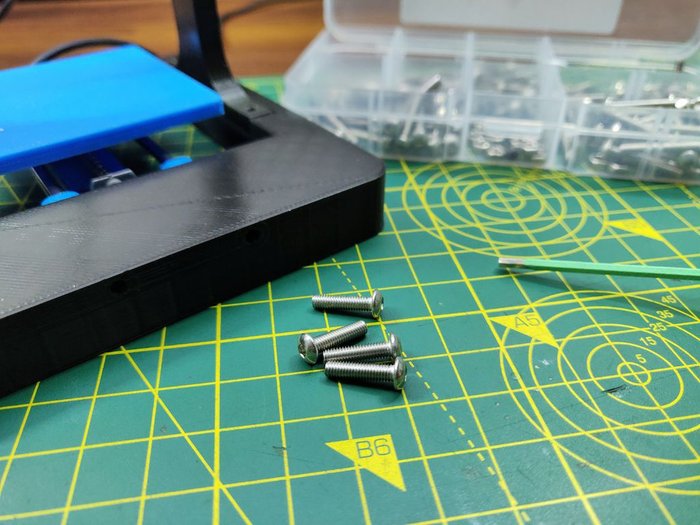
Комбинирование осей X и Y
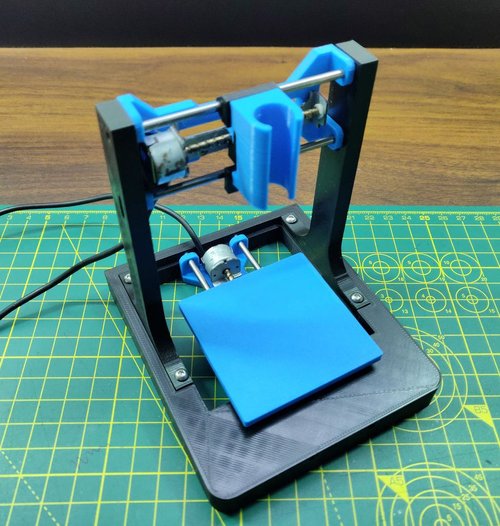
Используя 4 винта M3x12, объедините основание и две боковые рамы в одну сборку.
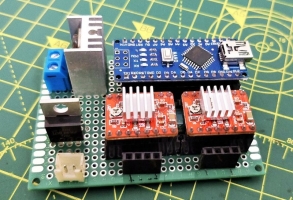
Электроника
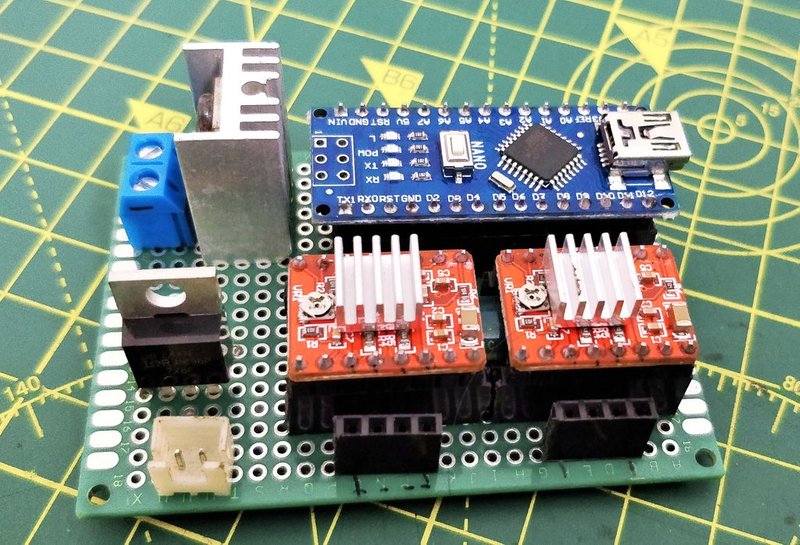
Детали используемые для драйвера:
- Arduino nano.
- 2x A4988 Драйверы шаговых двигателей.
- 1x IRFZ44N N-КАНАЛЬНЫЙ МОП-транзистор.
- 1x LM7805 Регулятор напряжения с радиатором.
- 1x 47 Ом и 1x 10 кОм резистор.
- 1x 1000 мкФ 16 В конденсатор.
- 1x 2,5 мм JST XH-Style 2-контактный разъем.
- Штыри заголовка мужского и женского пола.
- 1x (20 мм х 80 мм пустой печатной платы).
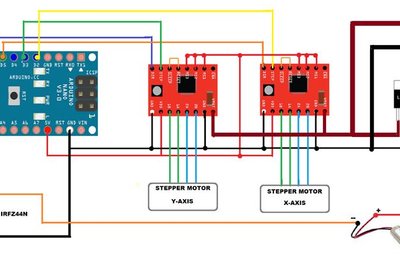
В GRBL защищены цифровые и аналоговые пины Arduino.
Шаговый контакт для осей X и Y прикреплен к цифровым контактам 2 и 3 соответственно. Вывод «Dir » для осей X и Y прикреплен к цифровым выводам 5 и 6 соответственно. D11 для лазерного включения. Arduino получает питание через USB-кабель. Драйверы A4988 через внешний источник питания. Все основание имеет общие связи. VDD A4988 подключены к 5V Arduino. Лазер, который использовался, работает на 5 В и имеет встроенную цепь постоянного тока. Для источника постоянного напряжения 5 В от внешнего источника питания используется регулятор напряжения LM7805. Радиатор является обязательным. IRFZ44N N-КАНАЛЬНЫЙ МОП-транзистор работает как электронный переключатель, когда получает цифровой высокий сигнал с контакта D11 Arduino. ПРИМЕЧАНИЕ: используем 5 В от Arduino Nano
Настройка микро шага для каждой оси.
MS0 MS1 MS2 Разрешение микрошагов.
Низкий Низкий Низкий Полный шаг.
Высокий Низкий Низкий Полшага
Низкий Высокий Низкий Квартальный шаг.
Высокий Высокий Низкий Восьмой шаг.
Высокий Высокий Высокий Шестнадцатый шаг.
3 контакта (MS1 , MS2 и MS3) предназначены для выбора одного из пяти шагов решения в соответствии с приведенной выше таблицей правды. Эти контакты имеют внутренние понижающие резисторы, поэтому, если мы оставим их отключенными, плата будет работать в режиме полного шага. Мы использовали 16-ю ступенчатую конфигурацию для плавного и бесшумного. Большинство (но , конечно, не все) шаговых двигателей совершают 200 полных шагов за оборот. Путем надлежащего управления током в катушках можно заставить двигатель двигаться меньшими шагами. Pololu A4988 может заставить двигатель двигаться с шагом 1/16 — или 3200 шагов за оборот. Основное преимущество микрошагования заключается в уменьшении шероховатости движения. Единственные полностью точные позиции — позиции полного шага. Двигатель не сможет удерживать стационарное положение в одном из промежуточных положений с той же точностью положения или с тем же удерживающим моментом, что и в положениях полного шага.
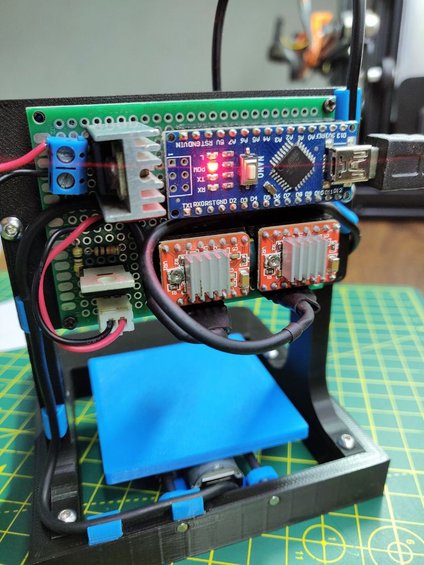
Сборка электроники в кадр

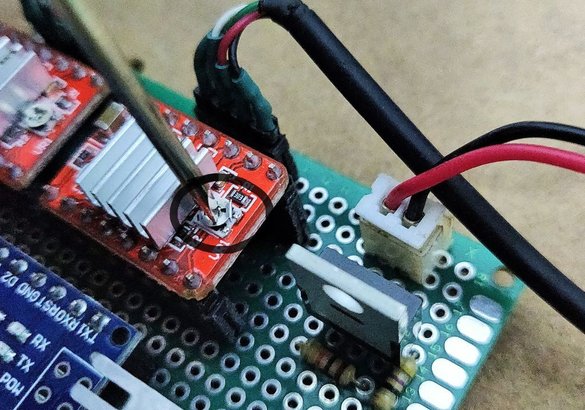
Смонтируйте плату драйвера на задней панели, используя 2 винта M2 и к раме машины, используя 2 винта M3x12. Подключены к соединениям для шаговых двигателей X, Y и Laser.
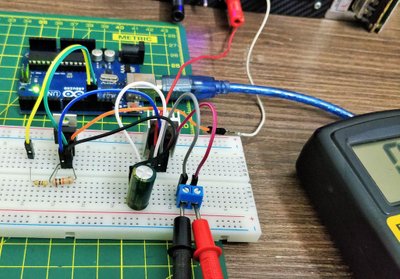
Регулировка тока шагового драйвера
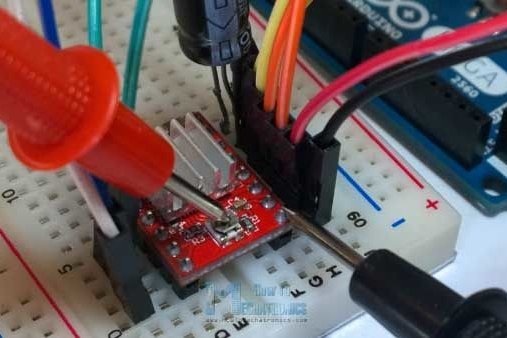
Для достижения высоких скоростей шага, питание двигателя обычно намного выше, чем было бы допустимо без активного ограничения тока. Например, типичный шаговый двигатель может иметь максимальный номинальный ток 1 А с сопротивлением катушки 5 Ом, что будет указывать на максимальное питание двигателя 5 В. Использование такого двигателя с напряжением 12 В позволило бы повысить скорость шага, но ток должен активно быть ограниченным до 1А, чтобы предотвратить повреждение двигателя. A4988 поддерживает такое активное ограничение тока, а потенциометр триммера на плате можно использовать для установки ограничения тока. Один из способов установить ограничение тока — перевести драйвер в полноступенчатый режим и измерить ток, проходящий через одну катушку двигателя, без замыкания входа STEP. Измеренный ток будет 0.7-кратный предел тока (поскольку обе катушки всегда включены и ограничены до 70% от предела тока, установленного в режиме полного шага). Обратите внимание, что изменение логического напряжения Vdd на другое значение изменит настройку ограничения тока, поскольку напряжение на выводе «ref » является функцией Vdd. Другой способ установить предел тока — это измерить напряжение непосредственно на потенциометре и рассчитать результирующий предел тока (резисторы чувствительности тока равны 0,1 Ом). Ограничение тока относится к опорному напряжению следующим образом: Другой способ установить предел тока — это измерить напряжение непосредственно на потенциометре и рассчитать результирующий предел тока (резисторы чувствительности тока равны 0,1 Ом). Ограничение тока соотносится к опорному напряжению следующим образом: Другой способ установить предел тока — это измерить напряжение непосредственно на потенциометре и рассчитать результирующий предел тока (резисторы чувствительности тока равны 0,1 Ом). Ограничение тока соотносится к опорному напряжению следующим образом: Ограничение тока = VREF × 1,25. Так, например, если опорное напряжение 0,6 В, то предельный ток 0.75A. Как упомянуто выше, в режиме полного шага ток через катушки ограничен до 70% от предела тока, поэтому, чтобы получить ток катушки для полного шага в 1А, предел тока должен быть 1А / 0,7 = 1,4А, что соответствует до VREF 1,4A / 1,25 = 1,12 В. См. таблицу данных A4988 для получения дополнительной информации. Примечание. Ток катушки может сильно отличаться от тока источника питания, поэтому не следует использовать ток, измеренный на источнике питания, для установки предела тока. Подходящее место для установки вашего измерителя тока — последовательно с одной из ваших катушек шагового двигателя.
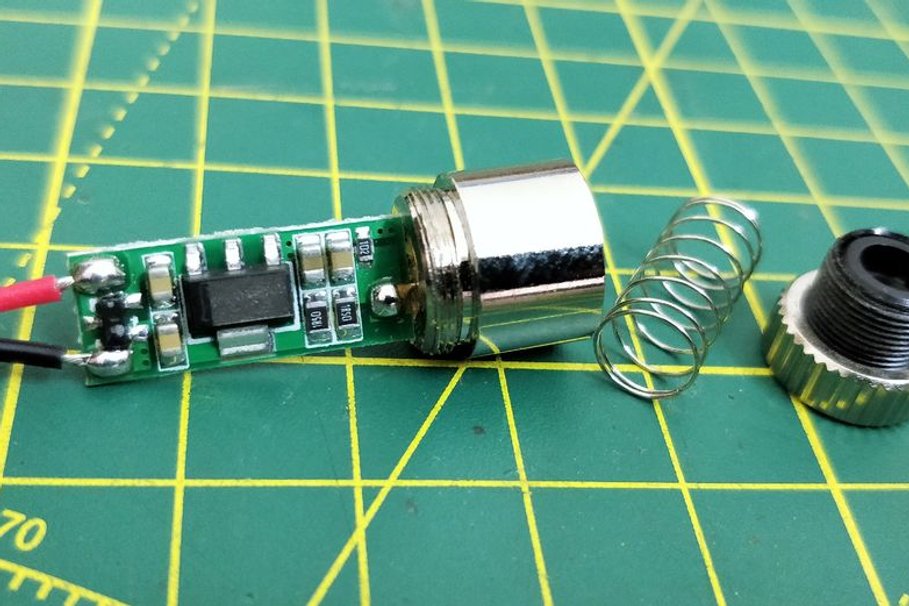
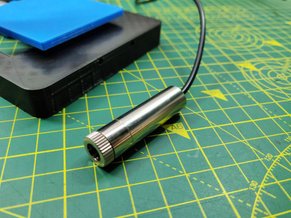
Лазер, который я использовал, это фокусируемый лазерный модуль 200-250 мВт, 650 нм. Наружный металлический корпус работает как теплоотвод для лазерного диода. Имеет фокусирующую линзу для регулировки лазерной точки.
Подсоедините разъем лазерного провода к лазерному разъему на плате драйвера.
Купить лазер можно тут .
Готовимся!
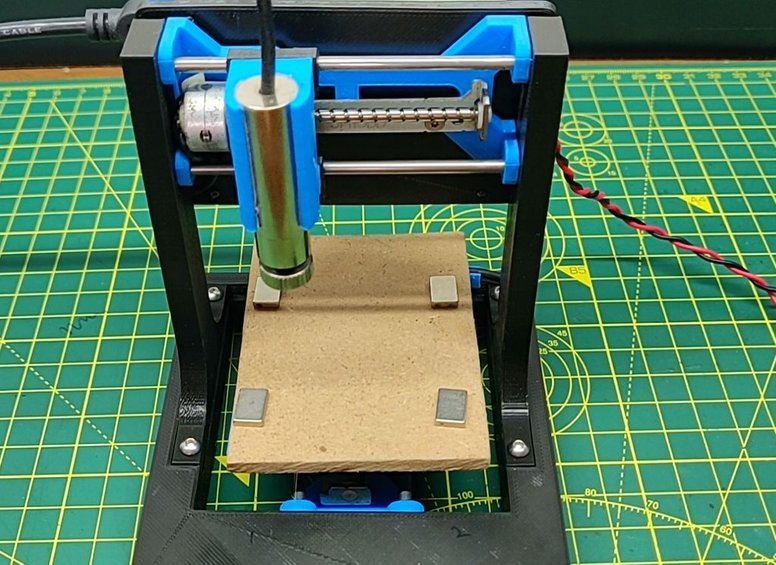
Используя четыре небольших неодимовых магнита, зафиксируйте рабочую деталь на рабочей станине и установите оси X и Y в исходное положение (home ). Включите плату драйвера через внешний источник питания и подключите Arduino Nano к компьютеру через кабель USB A — USB Mini B.
Также питание платы осуществляется от внешнего источника питания.
БЕЗОПАСНОСТЬ ПРЕЖДЕ ВСЕГО.
ОБЯЗАТЕЛЬНО ИСПОЛЬЗУЙТЕ СПЕЦИАЛЬНЫЕ ОЧКИ ДЛЯ ЗАЩИТЫ ОТ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ.
Прошивка GRBL
- Скачать GRBL, https://github.com/gnea/grbl
- Распакуйте на рабочий стол папку grbl-master, вы найдете ее в файле master.zip
- Запустите Arduino IDE
- В меню панели приложения выберите: Sketch -> #include Library -> Add Library from file.ZIP
- Выберите папку grbl, которую вы можете найти внутри папки grlb-master, и нажмите Open
- Теперь библиотека установлена и программное обеспечение IDE покажет вам следующее сообщение: Библиотека добавлена в вашу библиотеку. Проверьте меню «Включение библиотек».
- Затем откройте пример под названием «grbl upload» и загрузите его на свою платформу arduino.
Программное обеспечение для отправки G-кода
Также нам нужно программное обеспечение для отправки G-кода в ЧПУ, для этого я использовал LASER GRBL
LaserGRBL — один из лучших стримеров для Windows GCode для лазерных граверов DIY. LaserGRBL может загружать и транслировать путь GCode в arduino, а также гравировать изображения, картинки и логотип с помощью встроенного инструмента конвертации.
LASER GRBL Скачать на http://lasergrbl.com/en/
Последняя версия, стабильная
LaserGRBL постоянно проверяет наличие COM-портов на машине. Список портов позволяет вам выбрать COM-порт, к которому подключена ваша плата управления.
Пожалуйста, выберите правильную скорость передачи данных для соединения в соответствии с конфигурацией прошивки вашего устройства (по умолчанию 115200).
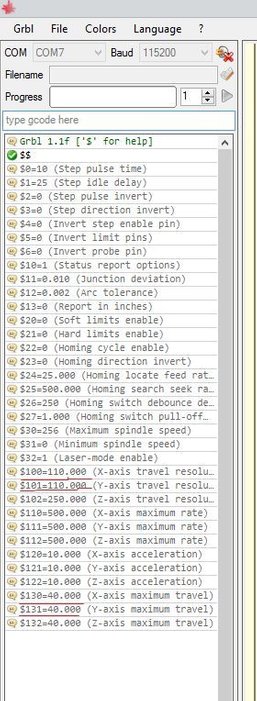
$$ — Просмотр настроек Grbl
Чтобы просмотреть настройки, введите $$ и нажмите клавишу ввода после подключения к Grbl. Grbl должен ответить списком текущих настроек системы, как показано в примере ниже. Все эти настройки являются постоянными и хранятся в EEPROM, поэтому, если вы выключите питание, они будут загружены обратно при следующем включении Arduino.
$0=10 (step pulse, usec)
$1=25 (step idle delay, msec)
$2=0 (step port invert mask:00000000)
$3=6 (dir port invert mask:00000110)
$4=0 (step enable invert, bool)
$5=0 (limit pins invert, bool)
$6=0 (probe pin invert, bool)
$10=3 (status report mask:00000011)
$11=0.020 (junction deviation, mm)
$12=0.002 (arc tolerance, mm)
$13=0 (report inches, bool)
$20=0 (soft limits, bool)
$21=0 (hard limits, bool)
$22=0 (homing cycle, bool)
$23=1 (homing dir invert mask:00000001)
$24=50.000 (homing feed, mm/min)
$25=635.000 (homing seek, mm/min)
$26=250 (homing debounce, msec)
$27=1.000 (homing pull-off, mm)
$100=314.961 (x , step/mm)
$101=314.961 (y , step/mm)
$102=314.961 (z , step/mm)
$110=635.000 (x max rate, mm/min)
$111=635.000 (y max rate, mm/min)
$112=635.000 (z max rate, mm/min)
$120=50.000 (x accel, mm/sec^2)
121=50.000 (y accel, mm/sec^2)
$122=50.000 (z accel, mm/sec^2)
$130=225.000 (x max travel, mm)
$131=125.000 (y max travel, mm)
$132=170.000 (z max travel, mm)
Настройка системы
Вот самая трудная часть проекта
— Настройка лазерного луча в наименьшую возможную точку на заготовке. Это самая сложная часть, которая требует времени и терпения, используя метод следа и ошибки.
— Настройка GRBL на $ 100, $ 101, $ 130 и $ 131
Настройка для GRBL
Я попытался гравировать квадрат сторон 40 мм и после стольких ошибок и изменения настройки grbl, я получил правильную линию 40 мм, выгравированную как по оси X, так и по оси Y. Если разрешение по осям X и Y не совпадает, изображение будет масштабироваться в любом направлении.
Имейте в виду, что не все шаговые двигатели от DVD приводов одинаковы.
Это длительный и трудоемкий процесс, но результаты будут хороши, если серьезно подойти к настройке.
Пользовательский интерфейс LaserGRBL.
- Управление подключением: здесь вы можете выбрать последовательный порт и правильную скорость передачи данных для подключения в соответствии с конфигурацией прошивки grbl.
- Управление файлами: это показывает загруженное имя файла и процесс гравировки. Зеленая кнопка «Play » начнет выполнение программы.
- Ручные команды: здесь вы можете ввести любую строку G-кода и нажать «ввод ». Команды будут помещены в очередь команд.
- Журнал команд и коды возврата команд: показать команды в очереди, их состояние выполнения и ошибки.
- Jogging control: позволяет вручную позиционировать лазер. Левый вертикальный ползунок контролирует скорость движения, правый ползунок контролирует размер шага.
- Предварительный просмотр гравировки: эта область показывает окончательный предварительный просмотр работы. Во время гравировки маленький синий крестик покажет текущее положение лазера во время выполнения.
- Сброс / возвращение / разблокировка GRBL: эти кнопки подают команду мягкого сброса, возврата и разблокировки на доску GRBL. Справа от кнопки разблокировки вы можете добавить некоторые пользовательские кнопки.
- Удержание и возобновление подачи: эти кнопки могут приостанавливать и возобновлять выполнение программы, посылая команды удержания или возобновления подачи на доску grbl.
- Количество строк и проекция времени: LaserGRBL может оценивать время выполнения программы на основе фактической скорости и хода выполнения задания.
- Переопределяет состояние элемента управления: показывает и изменяет фактическую скорость и переопределение мощности. Переопределение — это новая функция grbl v1.1, которая не поддерживается в более старой версии.
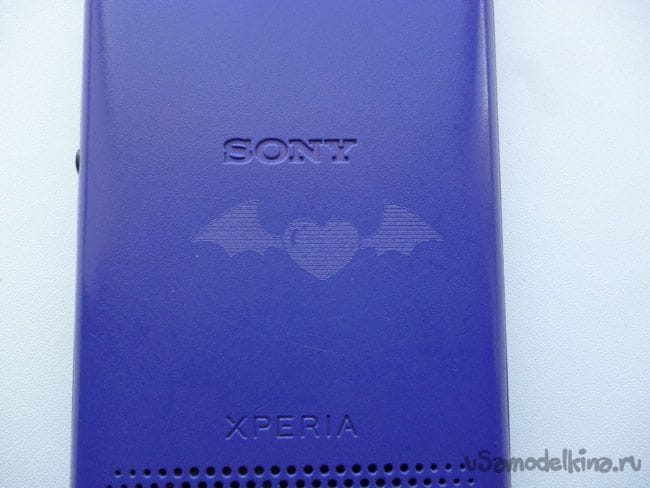
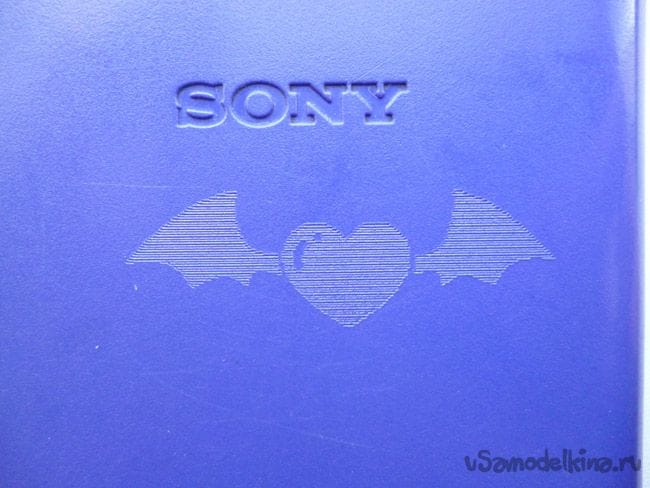
Гравюра на дереве


Растровый импорт позволяет загружать изображения любого вида в LaserGRBL и поворачивать его GCode инструкциями без необходимости использования другого программного обеспечения. LaserGRBL поддерживает фотографии, картинки, карандашные рисунки, логотипы, значки и старается сделать все возможное с любым видом изображения.
Его можно вызвать из меню «Файл , Открыть файл», выбрав изображение типа jpg, png или bmp.
Настройки для гравировки различны для всех материалов.
Определите скорость гравировки на мм, а качество линий на мм.
Этот лазер мощностью 250 мВт также способен резать тонкую бумагу, но скорость должна быть очень низкой, т.е. не более 15 мм / мин и лазерный луч должен быть правильно отрегулирован.
Источник