Электродвигатель подключается к самодельной конструкции строго с соблюдением полярности, через ограничительное сопротивление R1. При подаче питания на схему в точке соединения нижнего вывода двигателя и сопротивления R1 генерируются пульсации постоянного напряжения амплитудой от 0,3 до 0,6 В в зависимости от качества сборки и модели электродвигателя. Это пульсирующее, в момент включения двигателя напряжение имеет хаотичную форму. Разделительная емкость C1 отсекает постоянную составляющую напряжения, поэтому на базу биполярного транзистора поступает только переменная часть управляющего напряжения. При нормальной работе электродвигателя переменное напряжение в базе периодически немного открывает транзистор, не давая зарядится емкости C2 и открыться полевому транзистору. Неполярный конденсатор С2 кроме того еще и стабилизирует напряжение «исток — затвор» полевого транзистора, обеспечивая мягкое звучание сигнального капсюля HA1. При остановке электродвигателя из-за обрыва внутренней цепи обмотки, попадание между лопастями любого инородного предмета и т.п, пульсации напряжения идущие на базу биполярного транзистора оканчиваются. Транзистор запирается, этому также помогает шунтирующее сопротивление R2). Полевой транзистор в этот самый момент, как раз открывается, так как получает управляющее напряжение через сопротивление R3. Как только напряжение на затворе полевого транзистора достигнет уровня трех вольт, он откроется и подсоединит через себя звуковой капсюль со встроенным генератором звуковой частоты.
Звуковой генератор обладает довольно громким звуком, который можно услышать на приличном расстоянии. Звуковая сигнализация орет до тех пор, пока схема не будет отключена или пока вновь не запустится электродвигатель. При замыкании контактов тумблера SB1 электродвигатель начинает работать в полную силу, при этом другая группа контактов разрывает цепь звукового генератора. Конструкция в наладке и регулировке не нуждается и начинает работать сразу после подачи питания. При увеличении емкости C1 и номинала сопротивления R1 чувствительность увеличивается, а снизить ее можно уменьшением значения сопротивления R2.
Датчик вращения двигателя, маховика, вала
Основной принцип работы этого устройства собранного своими руками заключается в том, чтобы периодически прерывать поток инфракрасного излучения следующий от излучателя Д1 к приемнику Д2. Для этого к любому вращающемуся элементу системы достаточно прикрепить специальную пластину, которая периодически проходила бы и прерывала световой поток между излучателем и приёмником, или можно установить диск с несколькими отверстиями.
Схема датчика вращения работает так. При пуске электродвигателя преобразователь, фиксирующий вращение посылает импульсные сигналы на вход К511ЛА5. При непрерывном следовании импульсов от датчика в схему, емкости С3 и С4 будут разряжены, создавая на входах Д 1/4 и Д 1/1 нулевые логические уровни. На выходах 11 и 3 тогда будут логические единицы (Работа логического элемента И-НЕ), которые отпирают третий транзистор, закрывая четвертый. Питание на обмотку реле реле поступать не будет. В случае аварийного срабатывания датчика, подача импульсов останавливается, нули на выходах логических элементов закрывают Т3 и открывают Т4, включая реле, а оно либо блокирует схему, либо включает аварию.
В роли чувствительного элемента датчика, применен ИК излучатель в паре с фотодиодом ФД – 25, печатная плата конструкции приведена на рисунке ниже.
Рисунок печатной платы я рекомендую перенести в программу Sprint Layout, и уже с помощью ее, воспользоваться способом ЛУТ при изготовлении печатных плат
Модуль датчика вращения двигателя предназначен в основном для определения скорости вращения вала электродвигателя. Этот модуль в паре с микроконтроллером способен узнать и положение вала.
Этот датчик вращения измеряют величину благодаря регистрации некоторых событий, затем их количество соотносится с периодом времени, за которые они случились. Так в данной схеме измеряется скорость – под событиями здесь понимают импульсы, полученные в результате срабатывания оптического датчика во время вращения диска на валу электродвигателя с прорезями. Датчик вращения состоит из фототранзистора и светодиода, фотоэлемент воспринимает наличие или отсутствие излучения идущего от светодиода.
Представленная ниже схема может быть применена для отправки полученных импульсов в микроконтроллер. Основой схемы является распространенный оптический датчик типа OS25B10 со светодиодом и фототранзисторным выходом в одном корпусе.
Микросхема сдвоенного компаратора LM393, настроена на работу в роли простого триггера Шмита. Зелёный светодиод (LED1) показывает наличие приложенного к схеме напряжения, а красный LED2 контролирует выход модуля датчика скорости электродвигателя. Рекомендуемое рабочее напряжение схемы составляет 4.5 — 5.5 вольт.
Резистор R1 (180 Ом) используется в схеме датчика вращения для ограничения рабочего тока светодиода внутри оптического преобразователя OS25B10. Если нужно вы можете изменить его номинал для ваших условий. Также можно подстроить значение сопротивления R2 (10 КОм) для получения нужного уровня напряжения для вашей схемы. Резистор R7 (10 КОм) является подтягивающим сопротивлением.
Помещаемый в слот датчика энкодерный диск подходящего разделяет оптический преобразователь так, чтобы с одной стороны диска был светодиод, а с другой фототранзистор. Если путь светового луча не блокируется диском, фотоэлемент будет пропускать ток, иначе он будет закрыт.
Источник
Датчик вращения (2012-05-19)
Датчик ( сенсор, преобразователь ) позволяет получать, обрабатывать и предавать информацию о состоянии объекта. Это автономная система, содержащая преобразователь вида энергии и находящаяся в контролируемой зоне. Элемент преобразующий контролируемую величину ( температуру, давление, обороты, скорость, движение и т.д. ) в сигнал, удобный для измерения и обработки. В зависимости от области применения, сенсоры могут быть контактными и бесконтактными. Широко применяются в автоматизированных системах управления.
Рассмотрим некоторые варианты применения сенсоров:
Датчик вращения.
Датчик вращения , схема которого приведена на Рис 1, может быть применён т ам, где необходим контроль вращения: эл. двигателя, маховика, вентилятора, вала, всего, что крутится. Основной принцип работы данной схемы состоит в том, чтобы периодически прерывать (затенять) поток инфракрасного излучения исходящего от излучателя Д1 к приёмнику Д2. Для этого к вращающемуся элементу системы достаточно приделать небольшую пластину, которая периодически проходила бы между излучателем и приёмником, или для большей надёжности установить диск с несколькими отверстиями как показано на рисунке.
Схема работает следующим образом. При пуске электродвигателя датчик вращения, фиксирующий вращение подаёт импульсные сигналы на вход микросхемы. При непрерывном поступлении импульсов от датчикавращения в цепь, конденсаторы С3 и С4 будут постоянно разряжены, создавая на входах микросхемы Д 1/4 и Д 1/1 нулевые сигналы. На выходах 11 и 3 микросхемы установятся логические единицы, которые открыв транзистор Т3 закроют транзистор Т4. Реле К будет обесточено. При аварии подача импульсов прекращается, нули на выходе микросхемы закрывают транзистор Т3 и открывают транзистор Т4, который включает реле, а оно либо блокирует схему, либо включает аварию.
В качестве чувствительного элемента схемы , использован ИК излучатель в паре с фотодиодом ФД – 25 Рис — 1.
На Рис – 2 изображена принципиальная схема, а печатная плата показана на Рис – 3
На Рис – 2 изображена принципиальная схема, а печатная плата показана на Рис – 3
Данная схема датчика вращения, установленная мною на швейные машинки с программным управлением, несколько лет успешно фиксирует обрыв нитки.
В более массивных системах можно применить бесконтактные сенсоры (выключатели) БВК, БТП, КВП любой серии Рис — 4.
Источник
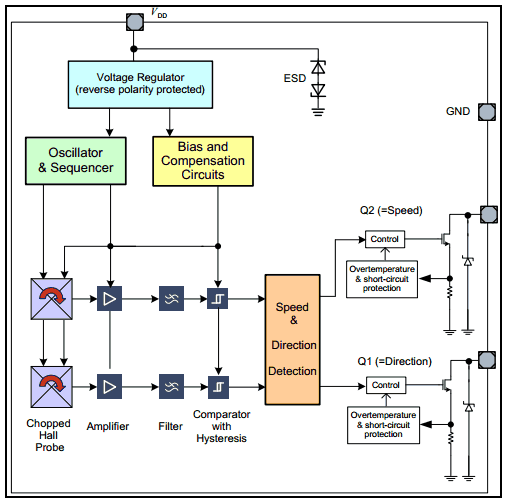
Вертикальный двойной датчик Холла для определения направления вращения и скорости
TLE4966V представляет собой вертикальный двойной датчик Холла для определения направления вращения и скорости. TLE4966V – первый двойной датчик Холла с интегрированными пластинами Холла, ориентированными вертикально, а не горизонтально на поверхности чипа. Это обеспечивает его чувствительность к электромагнитным полям в направлении плоскости пластины датчика. Такое 90-градусное изменение ориентации обеспечивает гибкость при установке разработанных устройств в зоны с ограниченным пространством.
Гибкость конструкции и низкий ток потребления от 4 мА до 7 мА датчика TLE4966V обеспечивают его пригодность при использовании в энергочувствительных электронных автомобильных системах, таких как подъемные механизмы багажника, подъемные механизмы окна с сервоприводом стекла, автомобильные люки и устройства регулировки положения сиденья. В других отраслях данный датчик также является отличным решением для эскалаторов, а также оконных штор и занавесок, оснащенных механическим приводом.
Семейство TLE4966 разработано для определения направления вращения и скорости вращения колеса с магнитным полюсом. Вертикально интегрируемые пластины Холла в датчике TLE4966V обеспечивают чувствительность в одной плоскости магнитных полей, а не перпендикулярно им. Изменение ориентации чувствительности на 90 градусов позволяет системным инженерам воплощать в свои проекты новые механические концепции. Это особенно важно для применений в зонах с ограниченным пространством, таких как подъемные механизмы окна с сервоприводом стекла и электронные подъемные механизмы багажника.
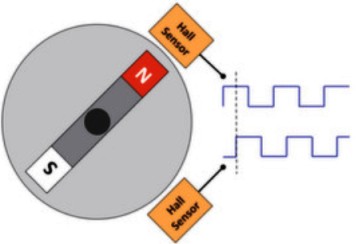
Определение направления и скорости вращения колеса с магнитным полюсом требует наличия двух отдельных пластин Холла. Из-за расстояния между двумя пластинами, они определяют немного различные сигналы в любой определенный момент времени, генерируя разность фаз. При изменении направления вращения разность фаз изменяет полярность. Датчик TLE4966V определяет это изменение и передает соответствующий сигнал. Скорость вращения колеса с магнитным полюсом можно вычислить с помощью выходного сигнала второго датчика. Этот сигнал инициируется при каждом изменении полярности магнитного поля.
Две интегрированные вертикальные пластины Холла на одном кремниевом кристалле внутри датчика TLE4966V ведут себя одинаково при температурном и эксплуатационном воздействии, не имея при этом отклонения чувствительности во время всего цикла эксплуатации. TLE4966V имеет два выходных сигнала: один сигнал для направления магнитного вращения, второй сигнал для скорости вращения колеса с магнитным полюсом. Это означает, что один датчик передает всю необходимую информацию, когда ранее для этого требовалось два датчика.
Датчик TLE4966V выполняет обработку сигнала и имеет высокую доступность сенсорного сигнала для быстрого применения и без необходимости программирования микроконтроллера. Датчик TLE4966V может работать от нерегулируемого источника питания, совместимого с системами от 3.5 В до 32 В. Датчик поставляется в тонком малогабаритном корпусе с 6 выводами (TSOP-6).
Источник
Энкодеры — датчики угла поворота
Позиционирование в различных видах промышленного оборудования обеспечивается с использованием простых с виду устройств — энкодеров (или, по-другому, датчиков угла поворота).
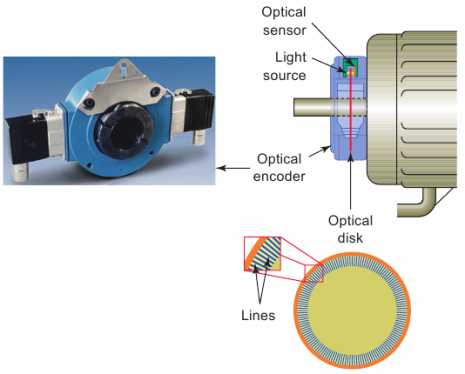
Энкодеры используются для преобразования линейного или вращательного движения в двоичный цифровой сигнал. Энкодер представляет собой устройство, вал которого соединяется с вращающимся валом исследуемого объекта, и обеспечивает электронный контроль угла поворота последнего. По принципу действия энкодеры подразделяются на оптические и магнитные.
На валу оптического энкодера установлен диск с окнами прерывания по периметру, напротив которых размещены светодиод и фототранзистор, обеспечивающие формирование выходного сигнала в виде последовательности прямоугольных импульсов с частотой, пропорциональной как количеству окон прерывания, так и скорости вращения диска/вала. Количество импульсов отображает угол поворота.
Оптические энкодеры выпускаются в виде инкрементальных и абсолютных датчиков.
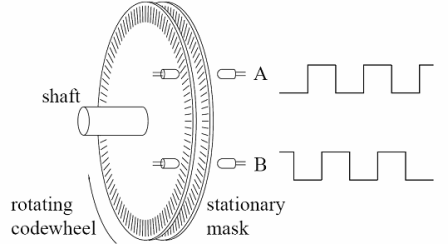
Инкрементальные энкодеры имеют диск прерывания с множеством окон одинакового размера на основном радиусе и две считывающих оптопары, что позволяет фиксировать как угол поворота, так и направление вращения вала. На вспомогательном радиусе диска размещено единственное окно прерывания и соответствующая оптопара, определяющие исходное положение (начало отсчета).
Отрицательный момент — инкрементальные энкодеры выдают относительный отсчет угла поворота, информация о котором не сохраняется при остановке вращения. К их преимуществам следует отнести простоту конструкции (и, соответственно, невысокую стоимость) при высоком разрешении и высокой рабочей частоте.
Инкрементальные энкодеры повышенной стойкости ориентированы на индустриальное применение — в машиностроении, прокатных станах, судостроении, текстильной, обувной промышленности, в деревообработке. Для таких энкодеров определяющими являются параметры — разрешение по углу поворота, способность работать на высоких частотах, высокая степень защиты, чтобы противостоять условиям неблагоприятной среды.
Диск с линиями или прорезями, которые прерывают луч света на оптический датчик. Электронная схема подсчитывает прерывания луча и генерирует цифровые выходные импульсы энкодера.
Кодирующий диск — устройство для преобразования в цифровую форму величин угловых перемещений вала. На кодирующий диск наносится геометрическое изображение цифрового кода. Знаки разрядов кода наносятся на концентрической дорожки, причем ближе к периферии располагаются младшие (менее значащие) разряды.
В зависимости от способа съема кода (контактного, фотоэлектрического, электромагнитного, индукционного, электростатического и т. п.) геометрическое изображение кода составляется из участков электропроводящих и электроизолированных, прозрачных и непрозрачных, магнитных и немагнитных и т. п.
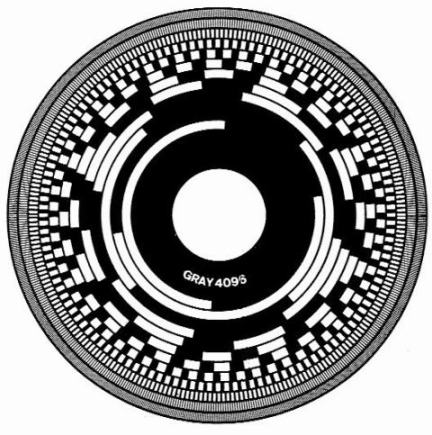
Преимущественно распространение получили кодирующие диски с разновидностями двоичного кода, исключающими возникновение ошибок при переходе через границы отдельных дискретных участков, когда некоторые разряды могут считываться по одну сторону границы, а некоторые — по другую (из-за неточной установки съемных устройств или из-за неодновременном считывания кода в процессе вращения диска. К числу таких кодов относятся т. н. фау-код (код Баркера) и рефлексный код (код Грея).
В некоторых оптических поворотных энкодерах используется отражательный кодирующий диск. На этом диске чередуются секции, которые поглощают свет или отражают его, а источник света вместе с приемником располагаются с одной стороны диска. При наличии только одного источника и приемника света последовательность импульсов от датчика позволяет выяснить, на сколько шагов повернулся диск относительно своего предыдущего положения.
Одиночный датчик не может указывать направление вращения, но если добавить вторую пару «источник приемник», отстоящую по фазе на 90 о от первой, то микроконтроллер по разности фаз между последовательностями импульсов сможет определить направление вращения диска.
Следует помнить, что любая система, которая определяет относительное вращение диска, но не может измерить его абсолютное угловое положение, является инкрементным датчиком.
Абсолютный энкодер имеет диск прерывания с концентрическими окнами на разных радиусах, относительные размеры которых определяются двоичным кодом, и которые считываются одновременно, давая кодированный выходной сигнал для каждой угловой позиции (код Грея, бинарный код. ).
В данном случае имеется возможность получать данные о мгновенном положении вала без цифрового счетчика или возврата к исходному положению, так как на выходе имеется кодированное слово — «n bit», защищенное от электрических шумов.
Абсолютные энкодеры используются в приложениях, требующих обязательного сохранения поступающих данных в течение продолжительного времени, при этом они сложнее по конструкции и являются более дорогостоящими.
Абсолютные энкодеры с интерфейсом полевой шины имеют выходной интерфейс связи с полевой шиной по стандарту CANopen, ProfiBus, DeviceNet, Ethernet, InterBus и используют бинарный код при определении угла поворота. Вышеуказанные интерфейсы связи программируются по ряду параметров: например, направление вращения, разрешение по импульсам на один оборот, скорость передачи данных.
Энкодеры, установленные на валу электродвигателя , эффективно обеспечивают управление точным позиционированием. Такие энкодеры обычно изготавливаются в варианте «отверстие» и важными элементами их конструкции являются специальные муфты, позволяющие компенсировать люфты вала двигателя.
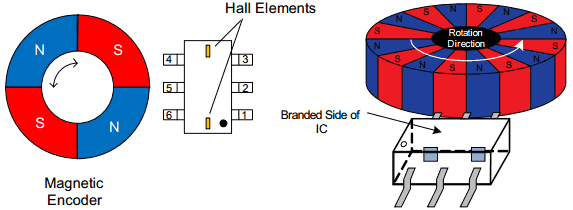
Позиционирование в вышеуказанных условиях наиболее эффективно обеспечивает магнитный энкодер , в котором преобразование углового перемещения вала в электронный сигнал реализуется бесконтактно на основе эффекта Холла, не связано с вращением оптического прерывателя внутри датчика, и допускает обработку сигналов на скоростях до 60000 об/мин.
В магнитном энкодере высокоскоростное вращение внешнего вала, на котором закреплен цилиндрический постоянный магнит, воспринимается датчиком Холла, совмещенным на одном полупроводниковом кристалле с контроллером обработки сигналов.
При вращении полюсов постоянного магнита над микросхемой с датчиком Холла переменный вектор магнитной индукции наводит напряжение Холла, содержащее информацию о мгновенном значении угла поворота вала. Микроконтроллер обеспечивает быстрое преобразование напряжения Холла в параметр угла позиционирования
Возможность такого преобразования без непосредственного механического соединения элементов магнита и датчика Холла является основным преимуществом магнитных энкодеров, обеспечивает им высокую надежность и долговечность, и позволяет эффективно работать в высокоскоростных приложениях, связанных с промышленной автоматизацией, полиграфией, металлообработкой, инструментально-измерительным оборудованием.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:











 Позиционирование в различных видах промышленного оборудования обеспечивается с использованием простых с виду устройств — энкодеров (или, по-другому, датчиков угла поворота).
Позиционирование в различных видах промышленного оборудования обеспечивается с использованием простых с виду устройств — энкодеров (или, по-другому, датчиков угла поворота).