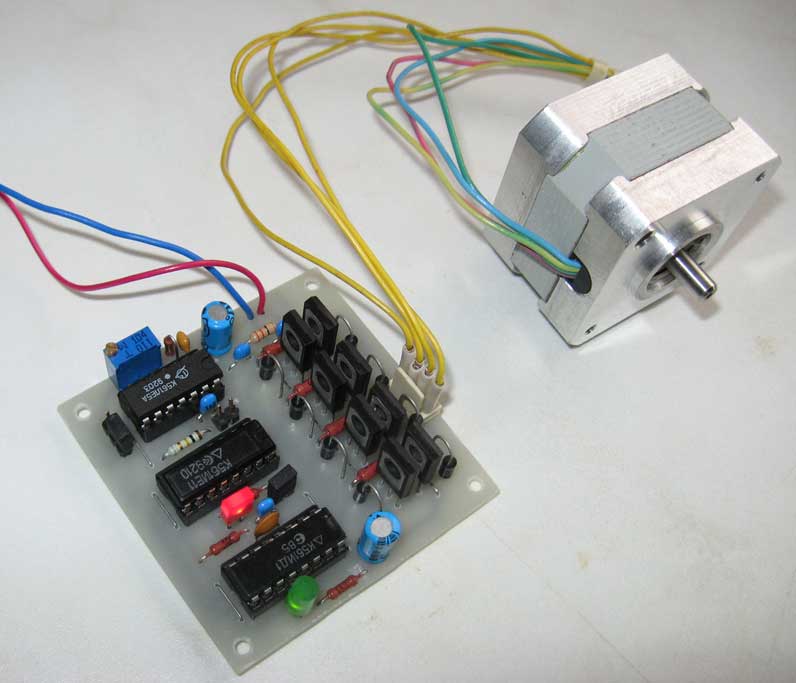
Этот драйвер реализует полношаговый режим с одной включенной фазой и способен управлять двигателем с током до 0,5А.
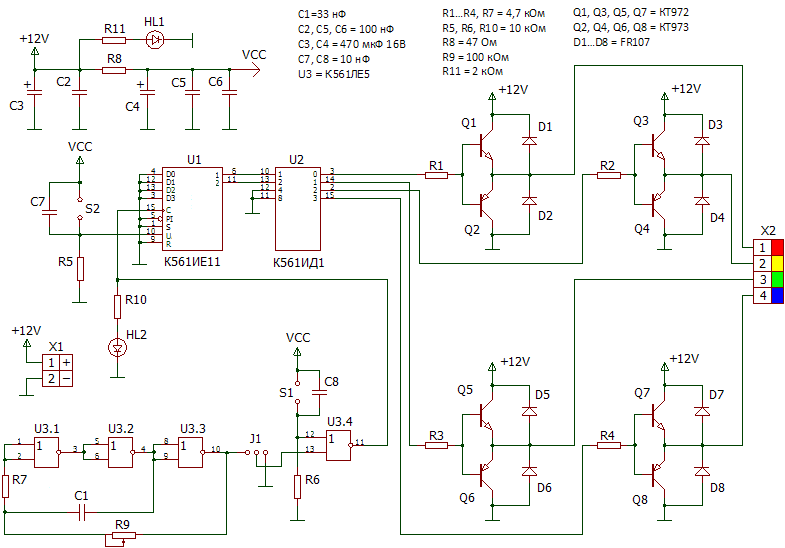
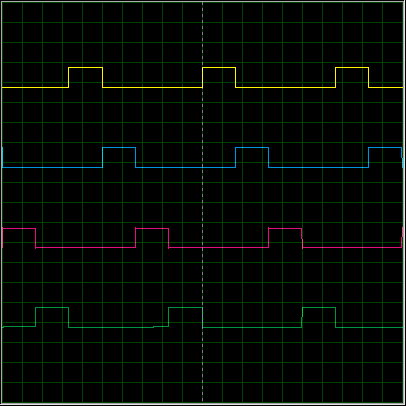
Формирование управляющей последовательности осуществляется м/сх U1, U2. Сигналами на выводах 3, 14, 2 и 15 м/сх U2 обеспечивается попеременная коммутация фаз:
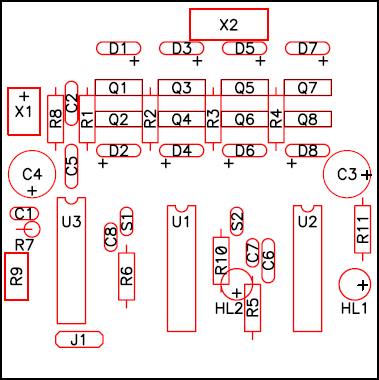
Ключи Q1-Q2, Q3-Q4, Q5-Q6, Q7-Q8 образуют полный H-мост, необходимый для переполюсовки выводов обмоток в биполярных двигателях . Диоды D1-D8 — защитные от выбросов напряжения при отключении обмотки. Управляющие импульсы могут подаваться непосредственно на вход C счетчика U1 (вывод 15) или на вход 13 элемента U3.4, что позволяет задействовать выключатель S1 — при его замыкании импульсы блокируются, двигатель останавливается, удерживая положение вала. Выключатель S2 управляет сменой направления вращения. На элементах U3.1-U3.3 собран генератор импульсов, которые могут подаваться на вход 13 элемента U3.4 для тестирования драйвера.
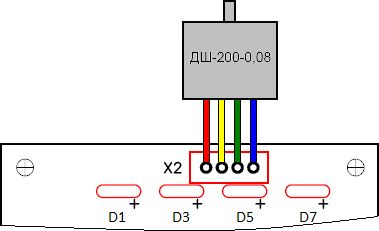
Подключение двигателя ДШ-200-0,08:
К статье прилагаются файлы:
Внимание! Запрещается воспроизведение данной статьи или ее части без согласования с автором. Если вы желаете разместить эту статью на своем сайте или издать в печатном виде, свяжитесь с автором. Автор статьи: Вершинин И.В.
Источник
2 Схемы
Принципиальные электросхемы, подключение устройств и распиновка разъёмов
Простой драйвер шагового двигателя
Предлагается 2 варианта схем простейших драйверов шаговых моторов, реально рабочих, так как информация взята из зарубежных радиоконструкторов (ссылка на оригиналы в конце статьи).
Схема драйвера шагового двигателя
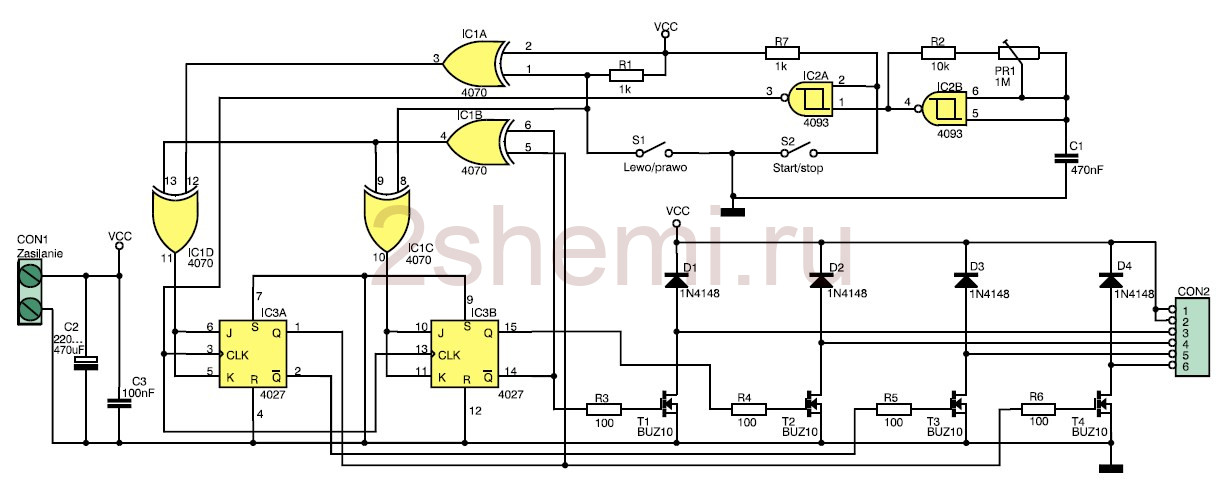
Схема драйвера шагового двигателя не содержит дорогих деталей и программируемых контроллеров. Работа может регулироваться в широком диапазоне с помощью потенциометра PR1. Есть изменение направления вращения двигателя. Катушки шагового двигателя переключаются с помощью четырех МОП-транзисторов T1-T4. Применение в блоке транзисторов большой мощности типа BUZ10 позволит подключить двигатели даже с очень большим током.
Особенности схемы и детали
управление четырехфазным шаговым двигателем
плавная регулировка скорости вращения в пределах всего диапазона
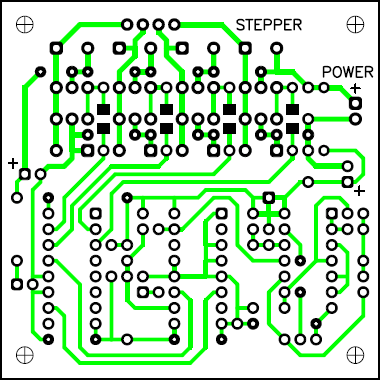
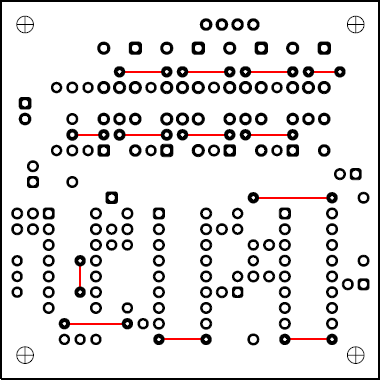
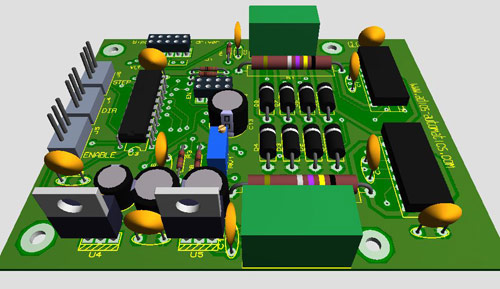
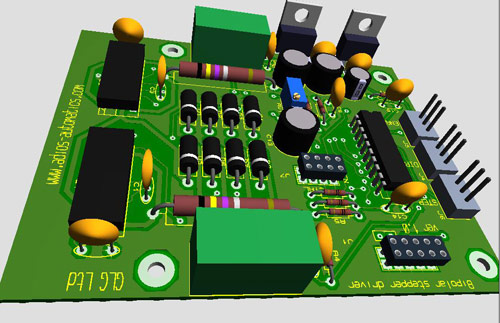
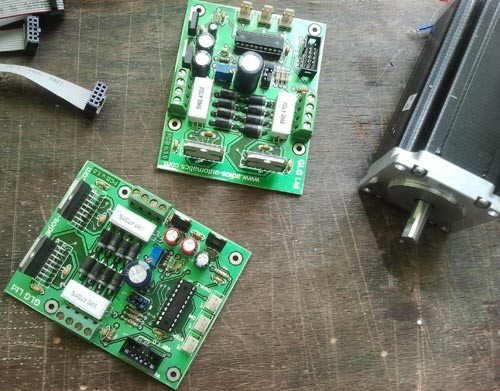
Блок драйвер шагового двигателя собран на печатной плате, показанной на рисунке. Монтируем, как правило, начиная с припайки резисторов и панелек для интегральных микросхем, а под конец электролитические конденсаторы и транзисторы большой мощности.
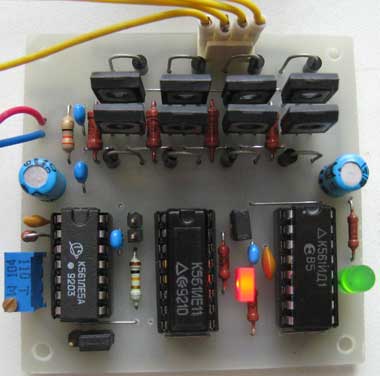
Блок, собранный из проверенных компонентов, не требует настройки и запускается сразу после подачи питания. Со значениями элементов, указанными на схеме, позволяет работать двигателю 5,25” и выполняет изменение скорости вращения в интервале от 40 об./мин. до 5 об./мин.
Биполярный контроллер шаговых двигателей
Схема представляет собой дешевую, и прежде всего легко собираемую альтернативу доступным микропроцессорным биполярным контроллерам шаговых двигателей. Рекомендуется там, где точность управления играет меньшую роль, чем цена и надежность.
Принципиальную схему можно разделить на следующие блоки:
Контроллер должен питаться постоянным напряжением, хорошо отфильтрованным, желательно стабилизированным.
Теперь пару слов про H-мосты, которые будут работать с этим драйвером. Они должны принимать на своих входах все возможные логические состояния (00, 01, 10, 11), без риска какого-либо повреждения. Просто в некоторых конфигурациях мостов построенных из дискретных элементов, запрещается одновременное включение двух входов — их естественно нельзя использовать с этим контроллером. Мосты выполненные в виде интегральных микросхем (например L293, L298), устойчивы к этому.
И в завершение третий вариант контроллера, на микросхемах STK672-440, имеющий все необходимые защиты и функции смотрите по ссылке.
Источник
Драйвер биполярных шаговых двигателей
Ниже представлена принципиальная схема драйвера биполярных шаговых двигателей с двумя L298 (усиленный) 48В, 4А.
Данный драйвер может использоваться для управления практически любых 2-фазных биполярных гибридных шаговиков с 4 выводами и может обеспечить ток работы до 4 ампер при максимальном напряжении 35В.
Драйвер поддерживает режимы работы full step и half step которые можно выбрать с помощю джапмпера H/F. Джампер CTRL предназначен для установки типа двигателя униполярный/биполярный, в позиции биполярного ШИМ работает на выходы INHIBIT в противном случае на выходы ABCD. Питание драйвера 12-35В для двигателя и 15-24В для схемы, диоды D1-D8 быстрые на 3 ампера, желательно Шоттки. Цепочкой R9 и C15 можно подбирать частоту ШИМ, при указанных номиналах она выше диапазона слышимых звуков, так что движок не жужжит. Потенциометром RV1 устанавливается рабочий ток двигателя.
Если будете гонять на максимальной мощности , то нужно обязательно посадить его на хороший радиатор и поставить кулер, также не забудьте намазать термопастой.
Схема и плата нарисованы в программе Proteus 7.7.
Схема протестированна и показала полную работоспособность драйвера
Используемые радиоэлементы:
Источник
Драйвер Для Биполярного Шд На Транзисторах И Его Расчет
Рекомендованные сообщения
Присоединяйтесь к обсуждению
Вы можете опубликовать сообщение сейчас, а зарегистрироваться позже. Если у вас есть аккаунт, войдите в него для написания от своего имени. Примечание: вашему сообщению потребуется утверждение модератора, прежде чем оно станет доступным.
Объявления
Сообщения
Похожие публикации
Здрасьте. Радиогубила в эфире. Давно не виделись. Тут это, такое дело. Пришёл значит драйвер с алика для светодиодов. Мастерю самопальный светильник в радиорубку. Вот он на картинке.
Мощность — 30-50 Вт. Выдает ток 480ма. Что для моих 3-х ваттных сборок диодов 5730 архидофига, мне надо хотя бы 300ма, а лучше 280ма. Ну собственно, параллельные токозадающие резисторы имеются, это rs1 — 1.5 ом, rs2 — 1.8 ом, и для rs3 rs4 соответственно. В сумме сопротивление где то — 0.8 ом. Подключил две сборки последовательно и амперметр в разрыв, включил, драйвер завелся, сборки очень ярко засветились, ток действительно 480 ма, думаю про конский нагрев сборок буквально за секунды от такого тока говорить излишне. Значит надо понизить ток. Для начала просто отпаял rs2 и rs4 которые по 1.8 ом. Итоговое сопротивление стало 1.5 ом. Подключил к двум сборкам, ток выдал 270 ма. То что нужно подумал я. Подключил 15 Led сборок. Включил, а диоды светят слабо, ток 125ма. Отпаял одну сборку, подключил снова, ток повыше, светит ярче, но все равно слабо. Отпаял еще одну, лучше, но недостаточно. Еще. И вот минус 3 сборки, светит нормально при токе 270ма. Хочется запитать все диоды. Мощность драйвера позволяет. 3в на 15 сборок получим 45вт мощности. Начал пытаться подбирать общее сопротивление токозадающих резисторов. Впаял обратно выпаенные 1.8 ом — подключаю, светят ярко все 15 штук, но ток 480ма. Впаял вместо 1.8 ом, резистор 3,3 ом. Все диоды светят. Ток опустился до 350ма, что тоже многовато. Впаял 5.1 ом. И вот тут началось интересное. При включение ток стартует с 170 ма и начинает медленно расти, сборки при этом моргают, рост длиться примерно пол минуты и выходит на 315ма. Начал искать почему так. На алике один челик писал подробный отзыв и упомянул что: » Микросхема S9268D. При подборе резисторов, драйвер может не запустится, светильник будет моргать, в этом случае необходимо подбирать «задающие резисторы R3 и R4.» Во, мой случай, подумал я. Только, в какую сторону и каким номиналом их подбирать то? Этого к сожалению сказано не было. Вот вам видосик как оно все происходит. Что скажут местные профи?
Всем привет. Требуется помощь в подборе драйверов. Искал хорошие led панели, но они оказали мне не по карману, поэтому принял решение сделать сам. Вот примеры LED панелей которые хочу сделать:
На одной панели планируется 72 светодиода по 3 Ватта каждый с напряжением 3,6v, помогите пожалуйста подобрать драйвер с запасом на эти 72 шт. Гуглил разные варианты но так и не смог разобраться с вольтажом.
Объясните пж какими соотношениями оперировать. Нужно пересчитать резисторы и конденсаторы усилителей. Из условий: запитано все 15В 50Гц. Единственное, что изменяется это частота с 50гц на 60гц. С чего начинать не знаю.
Ввиду серьёзной увлечённостью светодиодами и немалым количеством собранных светильников для собственных нужд, закономерно возник вопрос о том — как и какой драйвер для них изготовить. Выбор пал на широко распространённую и дешёвую микросхему 5241 (чуть позже, отдельной темой, задам вопрос по проблеме, возникшей у меня, при попытке заказать печатные платы для этого драйвера в Китае). Собрал я первый драйвер, запустился он с первого раза — осталось лишь подобрать номинал резистора, через который идёт ток — так, чтобы добиться необходимого тока нагрузки. Первый драйвер при входном напряжении в 28 вольт и светодиодом на 24 Вольта и током в 2 Ампера, имел на выходе ключ в корпусе SOIC8 и даже незначительно не нагревался, как и индуктивость. Далее мне понадобилось запитать светодиод на 12В, при 18 Вольтах на входе драйвера — на максимальный ток, который поддерживает эта микросхема — 2.5 Ампера. Схема с первого раза заработала, но длилось это несколько миллисекунд — ровно столько, сколько нужно для того, чтобы ключ сгорел. Я не сразу понял, что он сгорел, но поскольку схема не работала — начал искать причину. Разобравшись с проблемой, я поставил мощный полевик irf3205 в корпусе TO220 — но сжёг и его, правда он несколько секунд проработать успел. Тогда я посадил следующий транзистор на радиатор — и грелся он так сильно, что пришлось ставить радиатор мощнее. И вот теперь вопрос: почему в одном случае при токе в 2 Ампера и напряжении на выходе в 24В и входном 28В — транзистор и индуктивность не греются — а во втором случае — при токе в 2.5А, входном напряжении 18В и выходном в 12В — нагрев оказывается существенным? Транзистор, который я туда поставил, выдерживает в импульсном режиме до неимоверных 110 Ампер, а частота, на которой он может работать, вроде как простирается до трёх мегагерц — как он может нагреваться так сильно всего лишь при токе в 2.5А, если он выдерживает ток, в 55 раз выше? Частота работы драйвера доходит до 150Кгц, и как я понял — меняется в зависимости от величины используемой индуктивности. Второй вопрос — почему, также, сильно нагревается и индуктивность — там всего два витка на феррите, выполненные миллиметровым проводом
Как правило, логические сигналы для управления шаговым двигателем формирует микроконтроллер. Ресурсов современных микроконтроллеров вполне хватает для этого даже в самом ”тяжелом” режиме – микрошаговом.
Для подключения шаговых двигателей через слаботочные логические сигналы микроконтроллеров необходимы усилители сигналов – драйверы.
В функцию драйверов входит:
обеспечение необходимого тока и напряжения на фазных обмотках двигателя;
коммутация обмоток;
включение;
выключение;
смена полярности;
защита коммутирующих элементов от напряжения самоиндукции обмоток.
Речь в этой статье идет о простых драйверах, достаточных для большинства приложений. Существуют драйверы с гораздо большими возможностями:
обеспечение быстрого нарастания тока при включении и быстрого спада при выключении;
уменьшение тока для фиксации положения остановленного двигателя;
защитные функции;
формирование тока и напряжения обмоток для микрошагового режима;
и многие другие.
Схемы таких драйверов достаточно сложные, а в этих функциях в большинстве приложениях нет необходимости.
По схеме подключения шаговые двигатели делятся на униполярные и биполярные. Драйверы для этих двух вариантов двигателей принципиально отличаются.
Драйвер униполярного шагового двигателя.
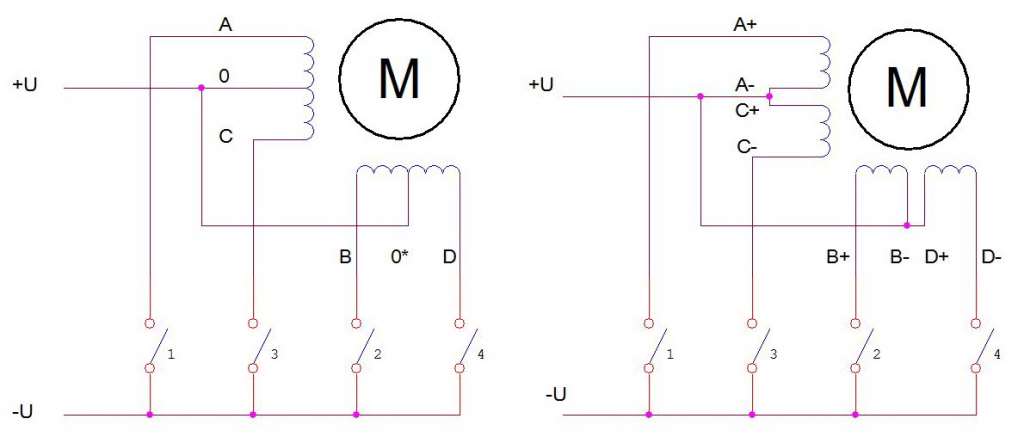
В униполярном режиме могут работать двигатели, имеющие следующие конфигурации обмоток.
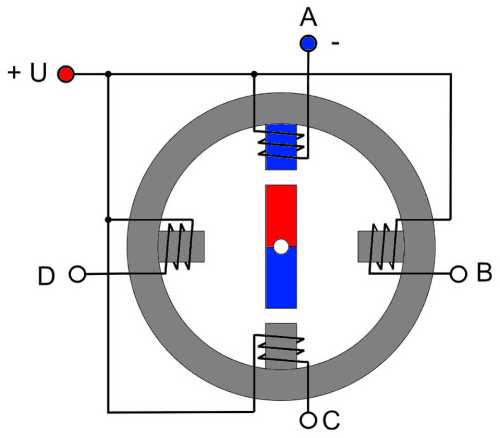
Напомню принцип управления униполярным шаговым двигателем. Четыре обмотки с общим проводом, подключенным к одному полюсу источника питания. Если другие выводы обмоток последовательно коммутировать к другому полюсу источника, то ротор двигателя будет вращаться.
Для коммутации обмоток таким способом достаточно всего четырех ключей, замыкающих обмотки на землю. Схемы коммутации обмоток двух предыдущих вариантов двигателей выглядят так.
Если последовательно замыкать ключи 1, 2, 3, 4, то ротор двигателя будет вращаться.
Схема драйвера униполярного шагового двигателя.
Практически ключи можно выполнить на биполярных транзисторах, но предпочтительнее использовать низкопороговые MOSFET транзисторы. Я применяю транзисторы IRF7341. Это MOSFET транзисторы с параметрами:
максимально допустимый ток 4 А;
предельное напряжение 55 В;
сопротивление в открытом состоянии 0,05 Ом;
порог включения 1 В;
выполнены в миниатюрном корпусе SO-8;
в корпусе два транзистора.
Крайне удобный вариант для использования в драйвере униполярного шагового двигателя.
Нет необходимости в радиаторах охлаждения ключей;
очень низкое падение напряжения на открытом транзисторе;
малые размеры;
всего два 8ми выводных корпуса для драйвера двухфазного шагового двигателя.
На биполярных транзисторах ключи с такими параметрами создать не возможно. Есть много других вариантов MOSFET транзисторов для ключей, например IRF7313 ( 6 А, 30 В, 0,029 Ом).
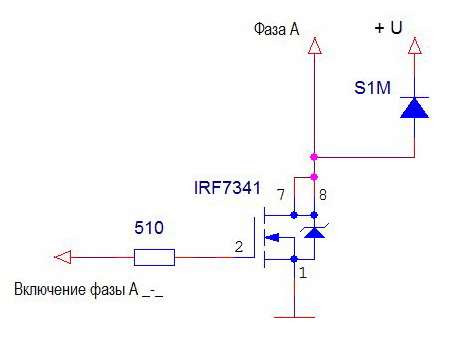
Схема ключа на MOSFET транзисторе для одной фазы выглядит так.
Ключ управляется непосредственно от микроконтроллера логическими уровнями KMOП или TTL ( 0 / +5 В). При управляющем сигнале высокого уровня (+5 В) ключ открыт, и через обмотку фазы идет ток. Диод шунтирует обмотку двигателя в обратном направлении. Он необходим для защиты транзистора от бросков напряжения самоиндукции при выключении фазы. Для управления двигателями на значительных скоростях вращения, лучше использовать высокочастотные диоды, например, FR207.
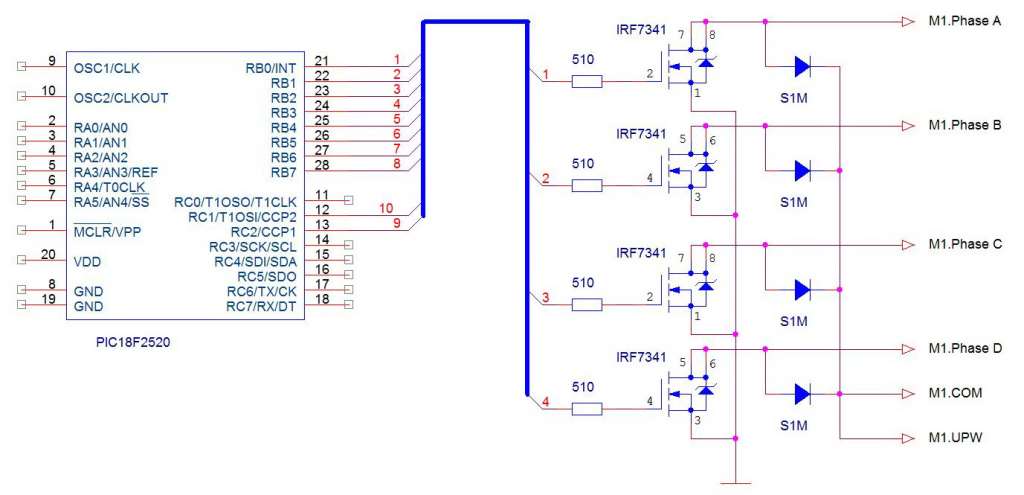
Вот фрагмент схемы подключения униполярного шагового двигателя к микроконтроллеру.
Защиты от коротких замыканий в этой схеме нет. Реализация защиты значительно усложняет драйвер. А замыканий обмоток шаговых двигателей практически не бывает. Я не встречался с таким явлением. Да и на фоне неприятности по поводу сгоревшего дорогого двигателя, замена транзистора не выглядит проблемой.
Кстати, механическое заклинивание вала шагового двигателя не вызывает недопустимых токов в ключах драйвера и защиты не требует.
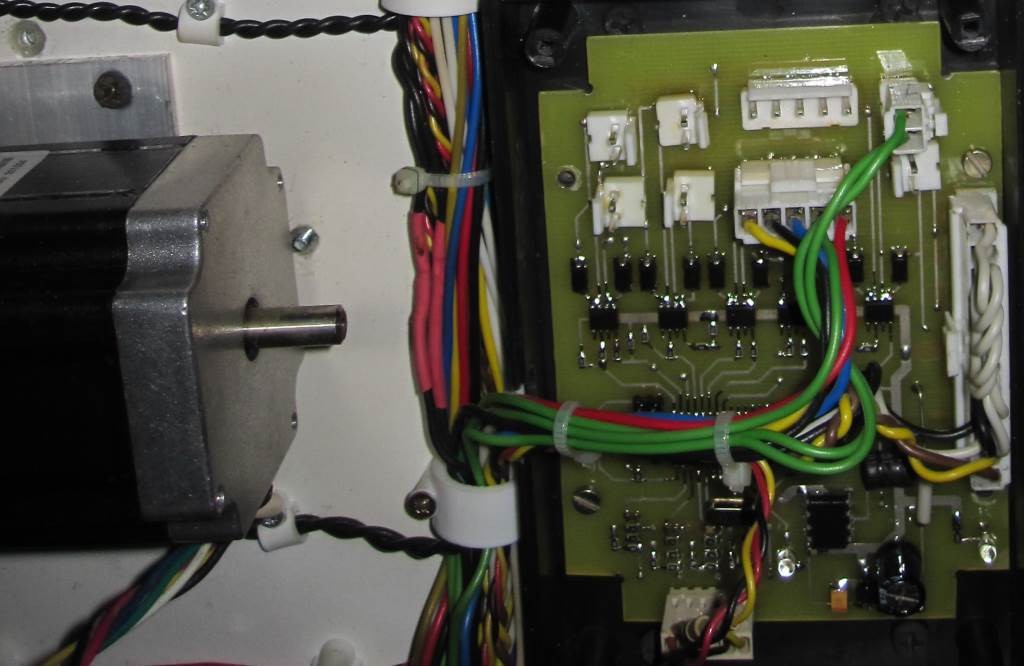
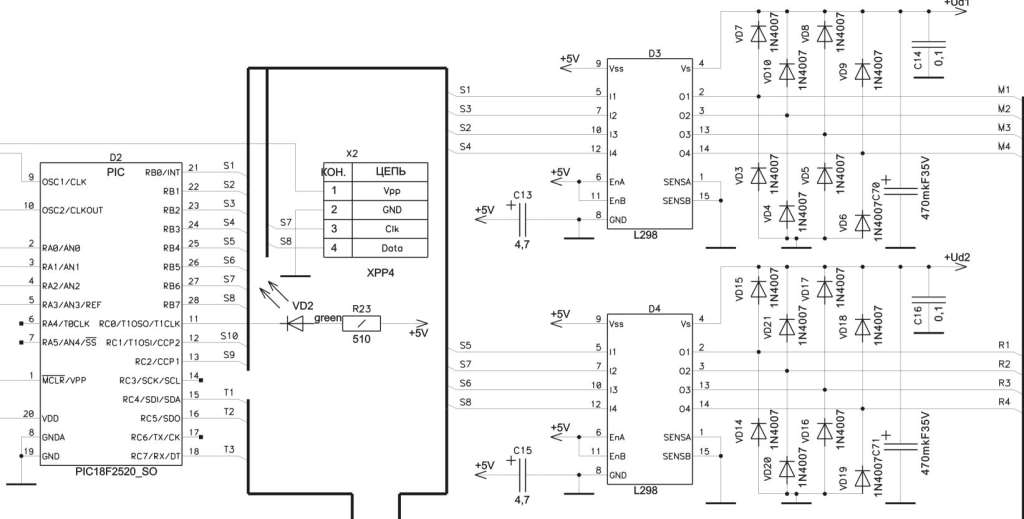
А это изображение платы контроллера униполярного шагового двигателя с PIC контроллером фирмы Microchip.
Простая плата с восьми разрядным микроконтроллером PIC18F2520 управляет:
двумя шаговыми двигателями с током фазы до 3 А;
двумя ШИМ ключами для электромагнитов;
считывает состояние 4х датчиков;
обменивается данными по сети с центральным контроллером.
Несмотря на простоту контроллера, реализованы следующие режимы управления:
полно-шаговый, одна фаза на полный шаг;
полно-шаговый, две фазы на полный шаг;
полу-шаговый;
фиксацию положения двигателя при остановке.
К достоинствам управления шаговым двигателем в униполярном режиме следует отнести:
простой, дешевый, надежный драйвер.
в униполярном режиме крутящий момент примерно на 40 % меньше по сравнению с биполярным режимом.
Драйвер биполярного шагового двигателя.
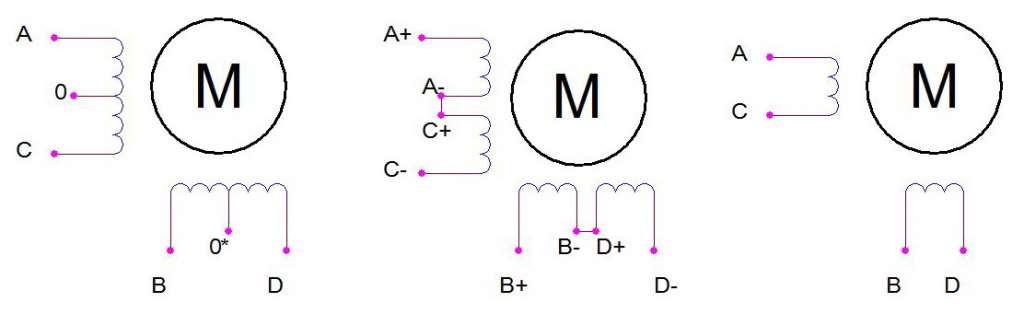
В биполярном режиме могут работать двигатели, имеющие любые конфигурации обмоток.
У биполярного двигателя по одной обмотке для каждой фазы. Обычно две обмотки AB и CD. В первых двух вариантах четыре обмотки соединяются так, что получается две. Обмотки по очереди подключаются к источнику питания в одной полярности, затем в другой.
Драйвер биполярного двигателя должен обеспечивать сложную коммутацию. Каждая обмотка:
подключается в прямой полярности к источнику напряжения;
отключается от источника напряжения;
подключается с противоположной полярностью.
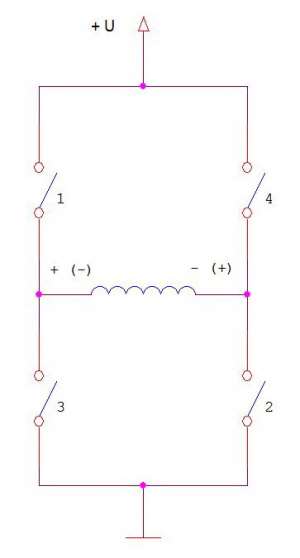
Схема коммутации одной обмотки биполярного двигателя выглядит так.
Для обеспечения двух полярных коммутаций от одного источника питания требуется 4 ключа. При замыкании 1 и 2 ключей обмотка подключается к источнику питания в прямой полярности. Замыкание 3 и 4 ключей подает на обмотку обратную полярность напряжения.
Сложность драйвера биполярного шагового двигателя вызвана не только большим числом ключей ( 4 ключа на обмотку, 8 ключей на двигатель), но и:
сложное управление верхними ключами ( 1 и 4) от логических сигналов “привязанных” к земле;
проблемы со сквозными токами при одновременном открывании ключей одного плеча ( 1,3 или 2,4).
Сквозные токи могут возникать из-за не одинакового быстродействия нижнего и верхнего ключа. К примеру, нижний ключ уже открылся, а верхний – не успел закрыться.
Схема драйвера биполярного шагового двигателя.
Реализовать схему драйвера биполярного шагового двигателя на дискретных элементах довольно сложно. Могу показать мою схему, которая подключает биполярный двигатель к униполярному драйверу. Эта схема используется для управления биполярными двигателями от контроллера, приведенного в качестве примера в предыдущей главе.
Схема достаточно простая. Проблема сквозных токов решается за счет резисторов 0.22 Ом в коммутируемых цепях. В момент коммутаций MOSFET транзисторов, верхний и нижний ключ оказываются одновременно открытыми на короткое время. Эти резисторы и ограничивают сквозной ток. К сожалению, они ограничивают и рабочий ток двигателя. Поэтому, несмотря на мощные транзисторы, драйвер по такой схеме можно использовать для токов коммутации не более 2 А. Схема не требует диодов для защиты от эдс самоиндукции обмоток, потому что эти диоды интегрированы в MOSFET транзисторы.
Гораздо удобнее и практичнее использовать интегральные драйверы биполярного шагового двигателя. Самым распространенным из них является микросхема L298N.
Драйвер биполярного шагового двигателя L298N.
Описания этой микросхемы на русском языке практически нет. Поэтому привожу параметры L298N достаточно подробно, по официальным материалам производителя этой микросхемы – компании STMicroelectronics (datasheet l298n.pdf).
L298N это полный мостовой драйвер для управления двунаправленными нагрузками с токами до 2 А и напряжением до 46 В.
Драйвер разработан для управления компонентами с индуктивными нагрузками, такими как электромагниты, реле, шаговые двигатели.
Сигналы управления имеют TTL совместимые уровни.
Два входа разрешения дают возможность отключать нагрузку независимо от входных сигналов микросхемы.
Предусмотрена возможность подключения внешних датчиков тока для защиты и контроля тока каждого моста.
Питание логической схемы и нагрузки L298N разделены. Это позволяет подавать на нагрузку напряжение другой величины, чем питание микросхемы.
Микросхема имеет защиту от перегрева на уровне + 70 °C.
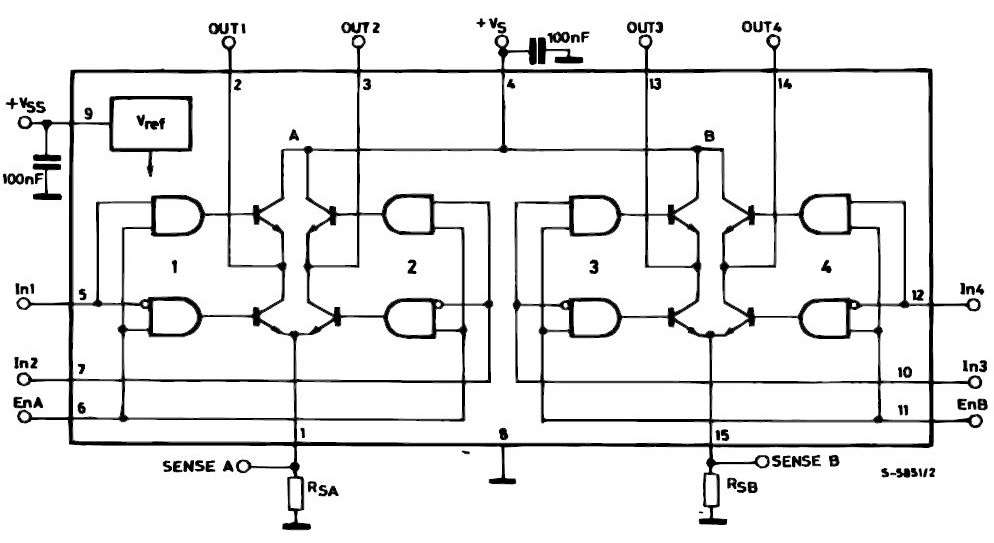
Структурная схема L298N выглядит так.
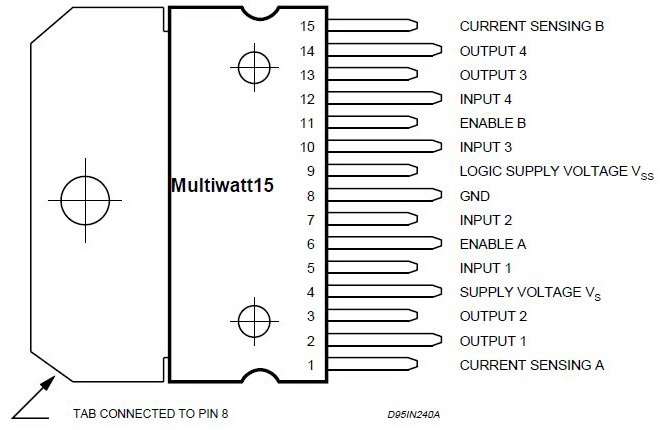
Микросхема выполнена в 15ти выводном корпусе с возможностью крепления радиатора охлаждения.
Назначение выводов L298N.
1
Sense A
Между этими выводами и землей подключаются резисторы — датчики тока для контроля тока нагрузки. Если контроль тока не используется, они соединяются с землей.
15
Sense B
2
Out 1
Выходы моста A.
3
Out 2
4
Vs
Питание нагрузки. Между этим выводом и землей должен быть подключен низкоимпедансный конденсатор емкостью не менее 100 нФ.
5
In 1
Входы управления мостом A. TTL совместимые уровни.
7
In 2
6
En A
Входы разрешения работы мостов. TTL совместимые уровни. Низкий уровень сигналов запрещает работу моста.
11
En B
8
GND
Общий вывод.
9
Vss
Питание логической части микросхемы (+ 5 В). Между этим выводом и землей должен быть подключен низкоимпедансный конденсатор емкостью не менее 100 нФ.
10
In 3
Входы управления мостом B. TTL совместимые уровни.
Входное напряжение высокого уровня (выводы 5, 7, 10, 12, 6, 11)
2,3 . Vss В
Iil
Входной ток низкого уровня (выводы 5, 7, 10, 12, 6, 11)
-10 мкА
Iih
Входной ток высокого уровня (выводы 5, 7, 10, 12, 6, 11)
30 . 100 мкА
Vce sat (h)
Напряжение насыщения верхнего ключа
при токе 1 А
при токе 2 А
0,95. 1,35. 1,7 В 2 . 2,7 В
Vce sat (l)
Напряжение насыщения нижнего ключа
при токе 1 А
при токе 2 А
0,85. 1,2. 1,6 В 1,7 . 2,3 В
Vce sat
Общее падение напряжения на открытых ключах
при токе 1 А
при токе 2 А
1,8 . 4,9 В
Vsens
Напряжение датчиков тока (выводы 1, 15)
-1 . 2 В
Fc
Частота коммутаций
25 . 40 кГц
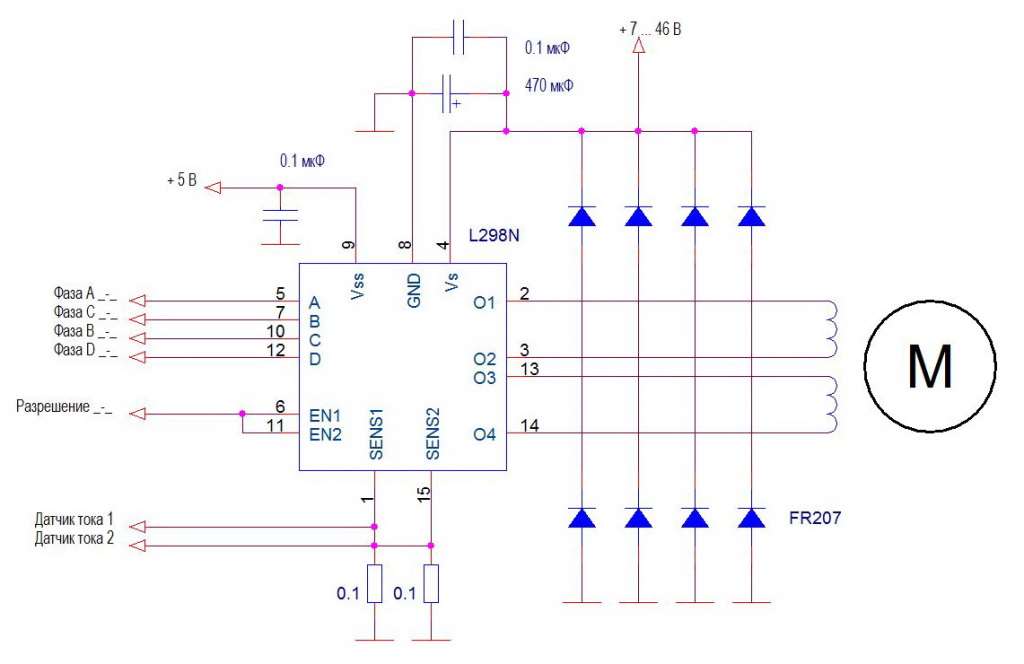
Схема подключения шагового двигателя к микроконтроллеру с помощью драйвера L298N.
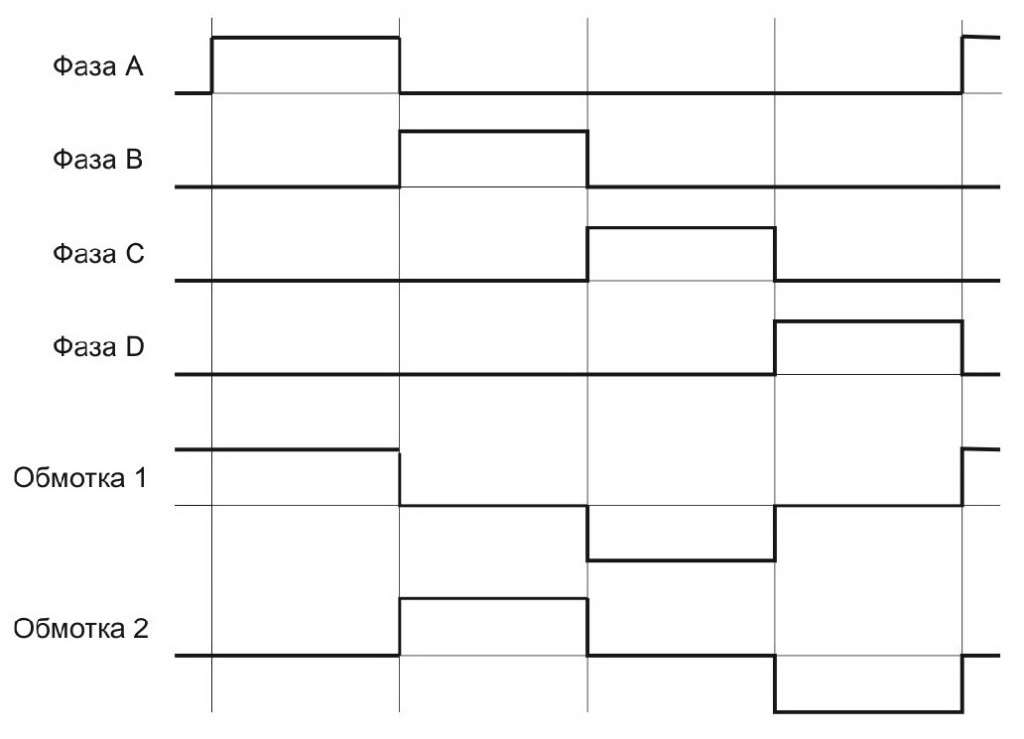
Диаграмма работы этой схемы в полношаговом режиме выглядит так.
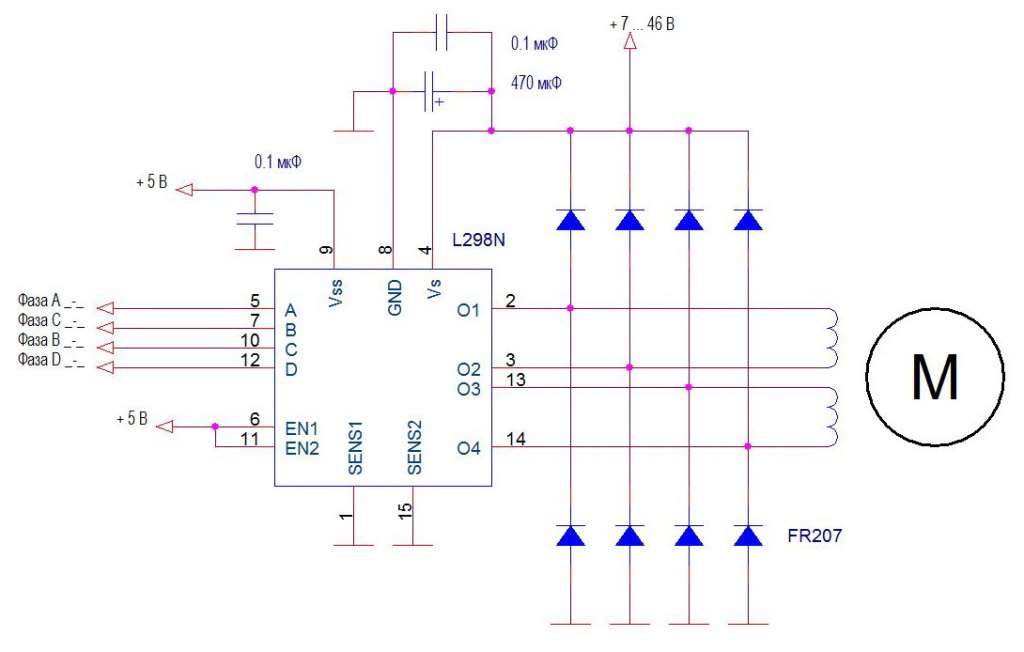
Если не используются разрешающие входы и датчики тока, схема выглядит так.
По функциям это аналог контроллера описанного в главе про униполярные двигатели, только для биполярного. Он также собран на PIC контроллере фирмы Microchip и управляет двумя биполярными шаговыми двигателями с током фаз до 2 А. Функциональные возможности и режимы управления двигателем те же.
К достоинствам управления шаговым двигателем в биполярном режиме следует отнести:
крутящий момент примерно на 40 % больше по сравнению с униполярным режимом.
можно подключать шаговые двигатели с любой конфигурацией обмоток.