Опытные котофеи, гляньте своим наметанным глазом, схему. Смущают пояснения справа. Схема нужно чтобы ШД работал постоянно как обычный моторчик, которого у меня нет.
_________________ Я живу в Израиле, советские компоненты мне не доступны, пожалуйста, советуйте что-нибудь импортное.
Вебинар поможет в выборе недорогих источников питания оптимальных для систем охраны, промышленных и телекоммуникационных приложений, а также для широкого применения. Будут представлены основные группы источников питания по конструктивным признакам и по областям применения в контексте их стоимости или их особенностей, позволяющих снизить затраты на электропитание конечного устройства.
_________________ Я живу в Израиле, советские компоненты мне не доступны, пожалуйста, советуйте что-нибудь импортное.
Не флуди! Пиши по теме.
Реклама
Реклама
Приглашаем всех желающих 13 октября 2021 г. посетить вебинар, посвященный искусственному интеллекту, машинному обучению и решениям для их реализации от Microchip. Современные среды для глубинного обучения нейронных сетей позволяют без детального изучения предмета развернуть искусственную нейронную сеть (ANN) не только на производительных микропроцессорах и ПЛИС, но и на 32-битных микроконтроллерах. А благодаря широкому портфолио Microchip, включающему в себя диапазон компонентов от микроконтроллеров и датчиков до ПЛИС, средств скоростной передачи и хранения информации, возможно решить весь спектр задач, возникающий при обучении, верификации и развёртывании модели ANN.
Сейчас этот форум просматривают: Bing [Bot] и гости: 13
Источник
Запускаем шаговый двигатель при помощи таймера NE555
Шаговый двигатель представляет собой особый тип двигателя, вал которого перемещается точно на определенный градус с каждым новым поступающим импульсом. Для подробного изучения читайте статью «Управление шаговым двигателем«
Чтобы управлять шаговым двигателем, мы должны организовать определенный порядок формирования управляющего напряжения, которое поступает на выводы обмоток электродвигателя. Эту достаточно сложную задачу попробуем решить при помощи таймера NE555 и двух интегральных микросхем CD4070 (К1561ЛП14) и CD4027(K561ТВ1).
Таймер 555 будет генерировать поток тактовых импульсов для управления скоростью вращения шагового двигателя. Тогда как микросхемы DD2 и DD3 будут формировать последовательно сигналы в правильном порядке, чтобы электродвигатель начал вращаться.
Эта схема управления ШД подойдет для однополярного шагового двигателя, который, как правило, имеет 6 управляющих выводов. Для начала соберем нестабильный мультивибратор (генератор прямоугольных сигналов) на таймере NE555. Вращая ручку переменного резистора можно изменять частоту сигнала, а значит и скоростью вращения.
Далее импульсы подадим на вход двух JK-тригеров (CD4027), которые формируют управляющие импульсы в необходимом порядке. Цепь на микросхеме CD4070 позволяет менять вращение на противоположное при помощи переключателя SA1. Для снижения нагрузки на выходы DD3 использованы 4 транзистора и 4 диода для защиты транзисторов от всплесков самоиндукции. В качестве питания применена схема источника питания.
Источник
3d-принтер и ЧПУ станок в одном устройстве своими руками
Блог для тех, у кого чешутся руки и есть желание заниматься цифровой техникой и не только цифровой и не только техникой.
Страницы
воскресенье, 1 июня 2014 г.
3. Изготовление драйвера шагового двигателя (для экспериментов).
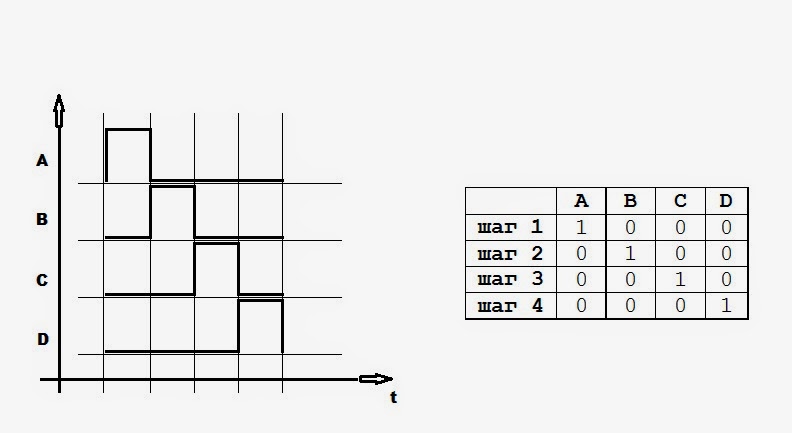
Получается если повторять эту последовательность сигналов ABCD можно вращать ротор электромотора в одну сторону. А как вращать ротор в другую сторону? Да очень просто, нужно изменить последовательность сигналов с ABCD на DCBA. А как поворачивать ротор на конкретный заданный угол, например 30 градусов? У каждой модели шагового электромотора есть такой параметр как число шагов. У шаговиков которые я вытащил из матричных принтеров этот параметр 200 и 52, т.е. чтобы совершить полный оборот 360 градусов одним двигателям нужно пройти 200 шагов а другим 52. Получается чтобы повернуть ротор на угол 30 градусов, нужно пройти: -в первом случае 30:(360:200)=16,666. (шагов) можно округлить до 17 шагов; -во втором случае 30:(360:52)=4,33. (шага), можно округлить до 4 шагов. Как видите есть достаточно большая погрешность, можно сделать вывод что чем больше шагов у мотора тем меньше погрешность. Погрешность можно уменьшать если использовать полушаговый или микрошаговый режим работы или механическим способом — использовать понижающий редуктор в этом случае страдает скорость движения. Как управлять скоростью вращения ротора? Достаточно изменить длительность импульсов подаваемых на входы ABCD, чем длиннее импульсы по оси времени, тем меньше скорость вращения ротора. Полагаю этой информации будет достаточно чтобы иметь теоретическое представление о работе шаговых электромоторов, все остальные знания можно будет получить экспериментируя. И так перейдем к схемотехнике. Как работать с шаговым двигателем мы разобрались, осталось подключить его к Arduino и написать управляющую программу. К сожалению напрямую подключить обмотки мотора к выходам нашего микроконтроллера невозможно по одной простой причине — нехватка мощности. Любой электромотор пропускает через свои обмотки достаточно большой ток, а к микроконтроллеру можно подключить нагрузку не более 40 mA (параметры ArduinoMega 2560). Что же делать если есть необходимость управлять нагрузкой например 10A да еще и напряжением 220В? Эту проблему можно решить если между микроконтроллером и шаговым двигателем интегрировать силовую электрическую схему, тогда можно будет управлять хоть трехфазным электромотором который открывает многотонный люк в ракетную шахту :-). В нашем случае люк в ракетную шахту открывать не нужно, нам нужно всего лишь заставить работать шаговый мотор и в этом нам поможет драйвер шагового двигателя. Можно конечно купить готовые решения, на рынке их очень много, но я буду делать свой собственный драйвер. Для этого мне понадобятся силовые ключевые полевые транзисторы Mosfet, как я уже говорил эти транзисторы идеально подходят для сопряжения Arduino с любыми нагрузками. На рисунке ниже представлена электрическая принципиальная схема контроллера шагового двигателя.
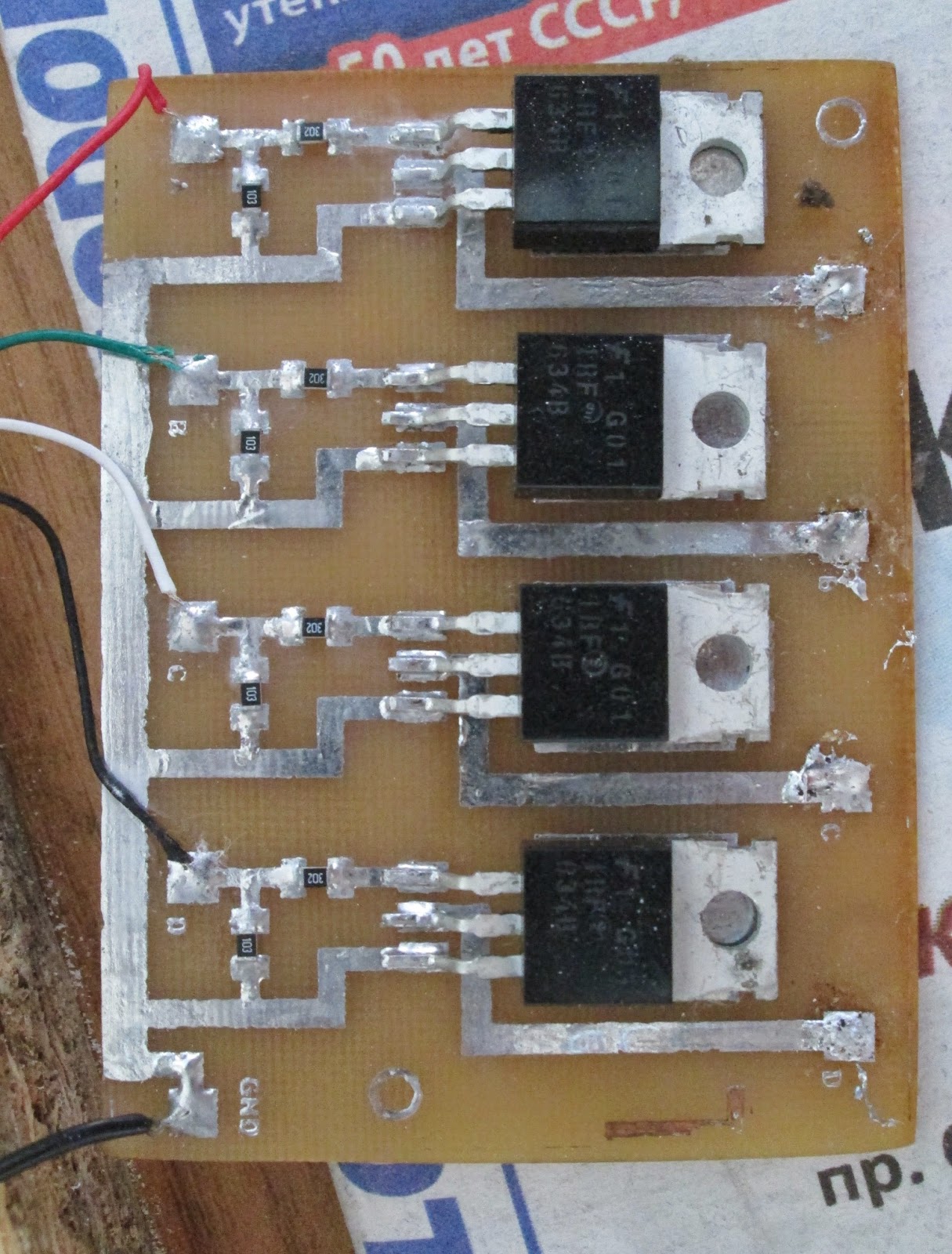
В качестве силовых ключей я применил транзисторы IRF634B максимальное напряжение исток-сток 250В, ток стока 8,1А, этого более чем достаточно для моего случая. Со схемой более менее разобрались будем рисовать печатную плату. Рисовал в встроенном в Windows редакторе Paint, скажу это не самая лучшая затея, в следующий раз буду использовать какой-нибудь специализированный и простой редактор печатных плат. Ниже представлен рисунок готовой печатной платы.
Далее это изображение в зеркальном отражении распечатываем на бумаге при помощи лазерного принтера. Яркость печати лучше всего сделать максимальной, а бумагу нужно использовать не обычную офисную а глянцевую, подойдут обычные глянцевые журналы. Берем лист и печатаем поверх имеющегося изображения. Далее получившуюся картинку прикладываем к заранее подготовленному куску фольгированного стеклотекстолита и хорошенько проглаживаем утюгом в течении 20 минут. Утюг нужно нагреть до максимальной температуры. Как подготовить текстолит? Во первых его нужно отрезать по размеру изображения печатной платы (при помощи ножниц по металлу или ножовкой по металлу), во вторых зашкурить края мелкой наждачной бумагой, чтобы не осталось заусенцев. Также необходимо пройтись наждачкой по поверхности фольги, снять окислы, фольга приобретет ровный красноватый оттенок. Далее поверхность обработанную наждачной бумагой нужно протереть ваткой смоченной в растворитель (используйте 646 растворитель он меньше воняет). После прогрева утюгом, тонер с бумаги запекается на поверхность фольгированного стеклотекстолита в виде изображения контактных дорожек. После этой операции плату с бумагой необходимо остудить до комнатной температуры и положить в ванночку с водой примерно на 30 минут. За это время бумага раскиснет и ее нужно аккуратно скатать подушечками пальцев с поверхности текстолита. На поверхности останутся ровные черные следы в виде контактных дорожек. Если у вас не получилось перенести изображение с бумаги и у вас есть огрехи, тогда следует смыть тонер с поверхности текстолита растворителем и повторить все заново. У меня все получилось с первого раза. После получения качественного изображения дорожек, необходимо вытравить лишнюю медь, для этого нам понадобится травильный раствор который мы приготовим сами. Раньше для травления печатных плат я использовал медный купорос и обычную поваренную соль в соотношении на 0,5 литра горячей воды по 2 столовые ложки с горкой медного купороса и поваренной соли. Все это тщательно размешивалось в воде и раствор готов. Но в этот раз попробовал иной рецепт, очень дешевый и доступный. Рекомендуемый способ приготовления травильного раствора: В 100 мл аптечной 3% перекиси водорода растворяется 30 г лимонной кислоты и 2 чайные ложки поваренной соли. Этого раствора должно хватить для травления площади 100 см2. Соль при подготовке раствора можно не жалеть. Так как она играет роль катализатора и в процессе травления практически не расходуется. После приготовления раствора, печатную плату необходимо опустить в емкость с раствором и наблюдать за процессом травления, тут главное не передержать. Раствор съест непокрытую тонером поверхность меди, как только это произойдет плату необходимо достать и промыть холодной водой, далее ее нужно просушить и снять с поверхности дорожек тонер при помощи ватки и растворителя. Если в вашей плате предусмотрены отверстия для крепления радиодеталей или крепежа, самое время просверлить их. Я опустил эту операцию по причине того что это всего лишь макетный драйвер шагового двигателя, предназначенный для освоения новых для меня технологий. Приступаем к лужению дорожек. Это необходимо сделать чтобы облегчить себе работу при пайке. Раньше я лудил при помощи припоя и канифоли, но скажу это «грязный» способ. От канифоли много дыма и шлака на плате который нужно будет смывать растворителем. Я применил другой способ, лужение глицерином. Глицерин продается в аптеках и стоит копейки. Поверхность платы необходимо протереть ваткой смоченной в глицерине и наносить припой паяльником точными мазками. Поверхность дорожек покрывается тонким слоем припоя и остается чистой, лишний глицерин можно удалить ваткой или промыть плату в воде с мылом. К сожалению у меня нет фотографии полученного результата, после лужения, но получившееся качество впечатляет. Далее необходимо припаять все радиодетали на плату, для пайки SMD компонентов я использовал пинцет. В качестве флюса использовал глицерин. Получилось очень даже аккуратно. Результат налицо. Конечно после изготовления плата выглядела лучше, на фото она уже после многочисленных экспериментов (для этого она и создавалась).
Листинг программы:
/* * Тестовая программа для шаговика */ #include #define STEPS 200
Stepper stepper(STEPS, 31, 33, 35, 37);
void setup() < stepper.setSpeed(50); >
void loop() < stepper.step(200); delay(1000); >
Данная управляющая программа заставляет делать один полный оборот вала шагового двигателя, после перерыва длительностью в одну секунду, повторяется до бесконечности. Можно поэкспериментировать со скоростью вращения, направлением вращения а также углами поворотов. Драйвер шагового двигателя (версия 2)