Как сделать драйвер биполярного шагового двигателя ARDUINO
Недавно приобрел ARDUINO в Китае. Мыслей по изготовление различных устройств- море. Мигать светодиодом на плате очень быстро надоело, захотелось чего то более существенного. Конечно надо бы заказать набор но цена его несколько завышена и пришлось что то искать в интернете, что то придумывать самому. В итоге все равно заказал в том же Китае различные датчики, реле, индикаторы… Немного попозже пришел знаменитый индикатор 1602. С ним поучился работать, тоже довольно быстро освоился. Захотелось поуправлять шаговым двигателем от CD-DVD привода. Ждать с Востока посылку 1-2 месяца не захотелось и я решил попробовать сделать драйвер самостоятельно. Нашел вот такую схему включения биполярного шагового двигателя:
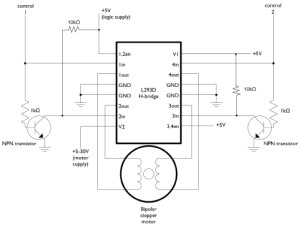 Схема включения биполярного шагового двигателя на микросхеме L293D
Схема включения биполярного шагового двигателя на микросхеме L293D
Микросхемы в нашей глуши я не нашел, или заказывать микросхемы в российских интернет-магазинах по стоимости 2-3 готовых драйверов за 1 микросхему. Микросхема представляет собой Н- мост из транзисторов. Кстати включать в мост надо или составные биполярные транзисторы (так называемые сборки Дарлингтона), или полевые транзисторы. Одиночным биполярным транзисторам нужна хорошая раскачка, которую контроллер дать не может, иначе получается очень высокое падение напряжение на транзисторе из за того что он открыться не может. Т.к. хороший товарищ занимается ремонтом компьютеров, то с полевиками проблем не возникло. Сначала хотел сделать на биполярниках- но получается в 2 раза больше транзисторов, что не совсем хорошо для габаритов драйвера, да и ток они выдержат гораздо меньший. Выпаяв около десятка полевых транзисторов и почитав на них даташиты я снова впал в уныние- в интернете есть схемы только на парах полевых транзисторов n- и p- типов. И ниодной схемы на транзисторах одного типа я просто не нашел. В компьютерах же используются транзисторы n- типа. Пришлось мудрить на макетной плате небольшой девайс на полевиках, попробовал управлять светодиодами, получилось и я решил собрать готовое устройство. Драйвер не нуждается в налаживании ибо налаживать здесь практически нечего. Единственная проблема возникла с программным обеспечением. Нашел даташит на похожий двигатель и по графикам работы выставил состояния выходов. После этого осталось только подобрать delay и все- устройство готово! Собственно схема замены микросхемы L293D.
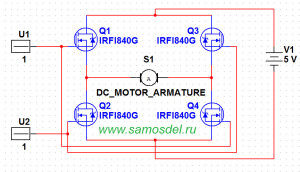 Драйвер на полевых транзисторах n-типа
Драйвер на полевых транзисторах n-типа
Данные транзисторов даны просто так- в мультисиме никак не смог их изменить. Я использовал транзисторы P60N03LDG в корпусе ТО-252 . В ней все довольно просто: при поступлении напряжения на один из входов U1 или U2 открываются 2 транзистора в верхнем и нижнем плече, причем крест- накрест. Таким образом переключается полярность напряжения на двигателе. А чтобы не подавалось напряжение сразу на 2 входа (это вызовет КЗ цепи питания) и использовал схему включения L293D. При таком включении NPN-транзистор не позволяет открывать сразу все 4 транзистора Н-моста. Кстати 1 двигатель будет управляться по 2 выходам Arduino, что крайне важно для экономии выходов и входов микроконтроллера. Еще условие- минусовой провод транзисторных ключей обязательно должен быть соединен с минусовым выводом платы управления. Питание подается на плату управления от Arduino, на ключи- от внешнего БП. Это позволяет подключить достаточно мощные двигатели. Все зависит от характеристик транзисторов. Итак для одного драйвера вам нужно 8 полевых транзисторов (P60N03LDG или любые другие n-канальные), любые 2 SMD-биполярных транзистора NPN (у меня стоят с маркировкой t04), smd-резисторы типоразмера 0805, и 4 такие же перемычки того же размера (на них написано 000 или просто 0). Все эти детали можно найти на старых и негодных материнских платах. Обязательно проверьте детали перед установкой.
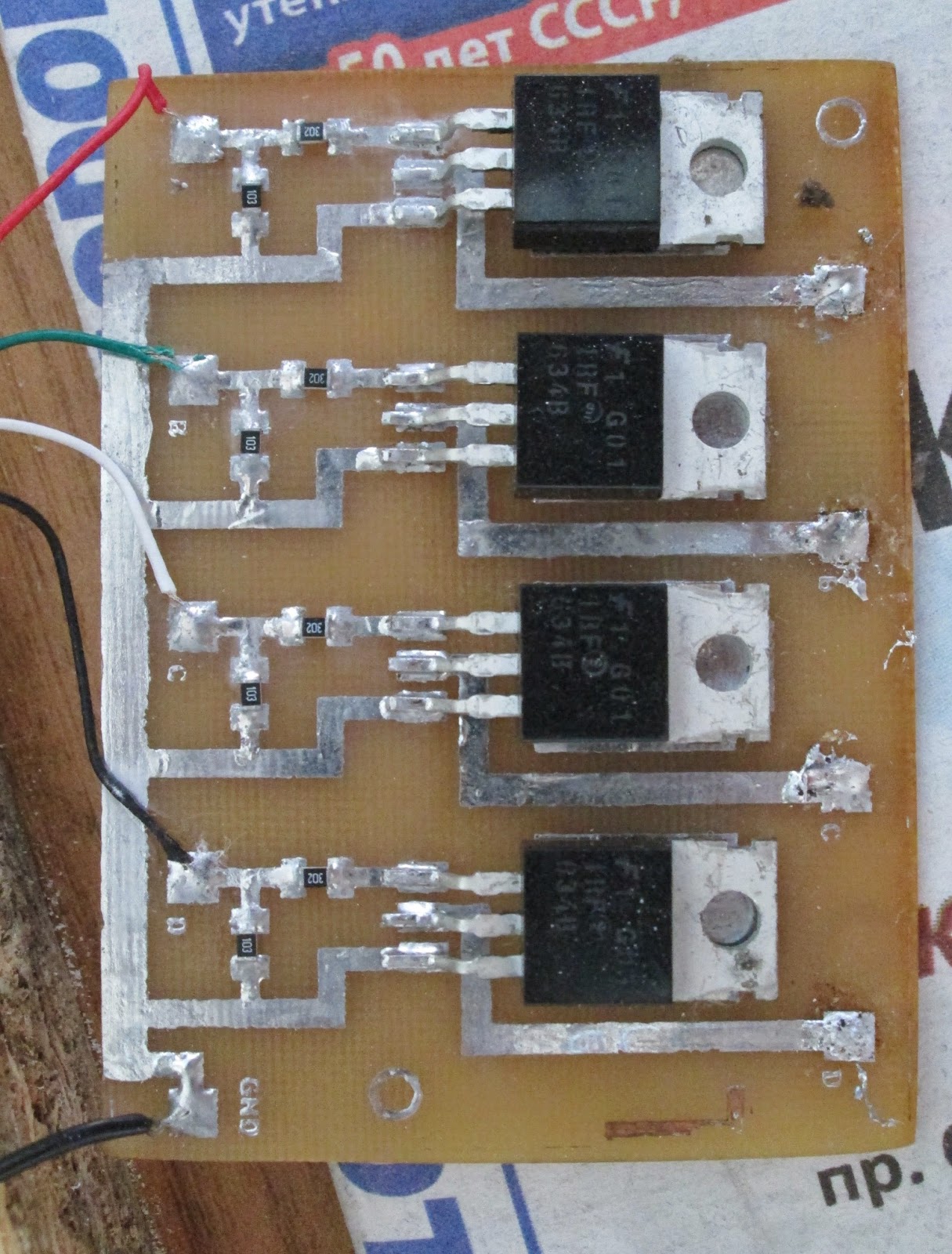
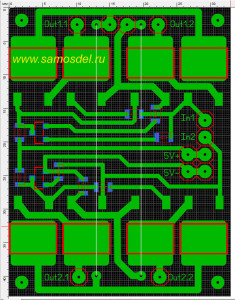 Плата драйвера Arduino
Плата драйвера Arduino
Выкладываю плату в формате Layout6. Плата драйвера скачать. Замечу что у вас должен получится именно такой вид- надписи должны быть читабельными а не перевернутыми, учитывайте это при печати платы, детали ведь будут установлены со стороны дорожек. Разъемы тоже выпаиваем из материнки феном, отрезаем сколько по надо количеству пинов и впаиваем в нашу плату- так гораздо удобнее и надежнее нежели чем паять провода в плату. Разберемся с назначением выводов: выводы Out1 и Out2- подключение обмоток шагового двигателя, In1,2- вход от Arduino, ±5V- питание управления от Arduino (сделал двойной разъем т.к. подключать питание можно шлейфом сразу к нескольким блокам), 2 перемычки располагаются на другой стороне платы, по ним подается напряжение на ключи. Размер платы- 43х33мм. Кто желает- может еще больше минимизировать.
Разберемся с программным обеспечением для шагового двигателя. Для любого шагового двигателя необходимо найти даташит или, на худой конец, диаграмму его работы. Я нашел только диаграмму, она выглядит так:
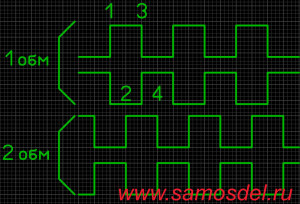 Диаграмма работы шагового двигателя
Диаграмма работы шагового двигателя
Цифрами указаны номера шагов. Исходя из того что при переключении контроллером высокого уровня на низкий драйвер сам переключит нужные ключи, то пишем, например, состояния только для верхних графиков каждой обмотки. Первый шаг: первая обмотка- первый провод +(HIGH), другой автоматически переключится драйвером на минус (LOW), напоминаю что описываем по первому проводу каждой обмотки. Вторая обмотка: первый провод — (LOW), второй + (HIGH), второй провод переключится драйвером автоматически. Переходим к первому изменению графика. Это 2 шаг. Описываем состояние только первых проводов. 1 провод первой обмотки остался HIGH, 1 провод второй сменился с LOW на HIGH . Третий шаг- 1 провод первой обмотки сменился HIGH на LOW, 1 провод второй остался HIGH. Четвертый шаг: 1 провод первой обмотки остался LOW, 1 провод второй обмотки сменился с HIGH на LOW. Описывать можно с любого шага, главное сохранять последовательность. Чтобы двигатель вращался в другую сторону нужно просто сдвинуть в диаграмме значения любой обмотки на полцикла в любую сторону. Таким образом можно писать программное обеспечение для драйверов. Нужно лишь знать диаграмму и правильно описать ее состояние на выходные пины.
Теперь подключаем плату к Arduino, двигателю. Забрасываем такой скетч:
// подключаемся к 8,9 выводам arduino
int input1 = 8;
int input2 = 9;
int stepCount = 5; //задержка между шагами регулирует скорость двигателя
void setup()
<
pinMode(input1,OUTPUT);
pinMode(input2,OUTPUT);
>
void loop()
<
//1-ый шаг
digitalWrite(input1,LOW);
digitalWrite(input2,HIGH);
delay(stepCount);
//2-ой шаг
digitalWrite(input1,HIGH);
digitalWrite(input2,HIGH);
delay(stepCount);
//3-ий шаг
digitalWrite(input1,HIGH);
digitalWrite(input2,LOW);
delay(stepCount);
digitalWrite(input1,LOW);
digitalWrite(input2,LOW);
delay(stepCount);
Подаем питание на драйвер, меняем, если надо, выводы одной обмотки и думаем куда приспособить данный девайс (можно открывать по времени и температуре форточки в теплице, управлять жалюзи и многое другое). Обращаю внимание что двигатель будет крутиться без остановки по данному скетчу, если надо- загоните в цикл и крутите на требуемое значение или, что еще лучше, напишите библиотеку и подключайте ее напрямую. Конечно это не такой крутой драйвер как на микросхеме, но для экспериментов, пока идут нормальные драйверы из Китая, его более чем достаточно. Всем удачи и успехов в осваивании микроконтроллеров. Подробнее о микроконтроллерах ARDUINO читайте ЗДЕСЬ.
Добавить комментарий Отменить ответ
Для отправки комментария вам необходимо авторизоваться.
Источник
3d-принтер и ЧПУ станок в одном устройстве своими руками
Блог для тех, у кого чешутся руки и есть желание заниматься цифровой техникой и не только цифровой и не только техникой.
Страницы
воскресенье, 1 июня 2014 г.
3. Изготовление драйвера шагового двигателя (для экспериментов).

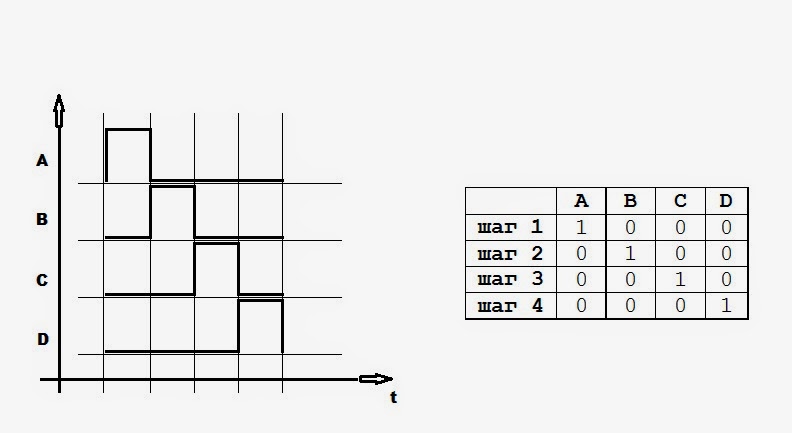
Получается если повторять эту последовательность сигналов ABCD можно вращать ротор электромотора в одну сторону.
А как вращать ротор в другую сторону? Да очень просто, нужно изменить последовательность сигналов с ABCD на DCBA.
А как поворачивать ротор на конкретный заданный угол, например 30 градусов? У каждой модели шагового электромотора есть такой параметр как число шагов. У шаговиков которые я вытащил из матричных принтеров этот параметр 200 и 52, т.е. чтобы совершить полный оборот 360 градусов одним двигателям нужно пройти 200 шагов а другим 52. Получается чтобы повернуть ротор на угол 30 градусов, нужно пройти:
-в первом случае 30:(360:200)=16,666. (шагов) можно округлить до 17 шагов;
-во втором случае 30:(360:52)=4,33. (шага), можно округлить до 4 шагов.
Как видите есть достаточно большая погрешность, можно сделать вывод что чем больше шагов у мотора тем меньше погрешность. Погрешность можно уменьшать если использовать полушаговый или микрошаговый режим работы или механическим способом — использовать понижающий редуктор в этом случае страдает скорость движения.
Как управлять скоростью вращения ротора? Достаточно изменить длительность импульсов подаваемых на входы ABCD, чем длиннее импульсы по оси времени, тем меньше скорость вращения ротора.
Полагаю этой информации будет достаточно чтобы иметь теоретическое представление о работе шаговых электромоторов, все остальные знания можно будет получить экспериментируя.
И так перейдем к схемотехнике. Как работать с шаговым двигателем мы разобрались, осталось подключить его к Arduino и написать управляющую программу. К сожалению напрямую подключить обмотки мотора к выходам нашего микроконтроллера невозможно по одной простой причине — нехватка мощности. Любой электромотор пропускает через свои обмотки достаточно большой ток, а к микроконтроллеру можно подключить нагрузку не более 40 mA (параметры ArduinoMega 2560). Что же делать если есть необходимость управлять нагрузкой например 10A да еще и напряжением 220В? Эту проблему можно решить если между микроконтроллером и шаговым двигателем интегрировать силовую электрическую схему, тогда можно будет управлять хоть трехфазным электромотором который открывает многотонный люк в ракетную шахту :-). В нашем случае люк в ракетную шахту открывать не нужно, нам нужно всего лишь заставить работать шаговый мотор и в этом нам поможет драйвер шагового двигателя. Можно конечно купить готовые решения, на рынке их очень много, но я буду делать свой собственный драйвер. Для этого мне понадобятся силовые ключевые полевые транзисторы Mosfet, как я уже говорил эти транзисторы идеально подходят для сопряжения Arduino с любыми нагрузками.
На рисунке ниже представлена электрическая принципиальная схема контроллера шагового двигателя.
В качестве силовых ключей я применил транзисторы IRF634B максимальное напряжение исток-сток 250В, ток стока 8,1А, этого более чем достаточно для моего случая. Со схемой более менее разобрались будем рисовать печатную плату. Рисовал в встроенном в Windows редакторе Paint, скажу это не самая лучшая затея, в следующий раз буду использовать какой-нибудь специализированный и простой редактор печатных плат. Ниже представлен рисунок готовой печатной платы.
Далее это изображение в зеркальном отражении распечатываем на бумаге при помощи лазерного принтера. Яркость печати лучше всего сделать максимальной, а бумагу нужно использовать не обычную офисную а глянцевую, подойдут обычные глянцевые журналы. Берем лист и печатаем поверх имеющегося изображения. Далее получившуюся картинку прикладываем к заранее подготовленному куску фольгированного стеклотекстолита и хорошенько проглаживаем утюгом в течении 20 минут. Утюг нужно нагреть до максимальной температуры.
Как подготовить текстолит? Во первых его нужно отрезать по размеру изображения печатной платы (при помощи ножниц по металлу или ножовкой по металлу), во вторых зашкурить края мелкой наждачной бумагой, чтобы не осталось заусенцев. Также необходимо пройтись наждачкой по поверхности фольги, снять окислы, фольга приобретет ровный красноватый оттенок. Далее поверхность обработанную наждачной бумагой нужно протереть ваткой смоченной в растворитель (используйте 646 растворитель он меньше воняет).
После прогрева утюгом, тонер с бумаги запекается на поверхность фольгированного стеклотекстолита в виде изображения контактных дорожек. После этой операции плату с бумагой необходимо остудить до комнатной температуры и положить в ванночку с водой примерно на 30 минут. За это время бумага раскиснет и ее нужно аккуратно скатать подушечками пальцев с поверхности текстолита. На поверхности останутся ровные черные следы в виде контактных дорожек. Если у вас не получилось перенести изображение с бумаги и у вас есть огрехи, тогда следует смыть тонер с поверхности текстолита растворителем и повторить все заново. У меня все получилось с первого раза.
После получения качественного изображения дорожек, необходимо вытравить лишнюю медь, для этого нам понадобится травильный раствор который мы приготовим сами. Раньше для травления печатных плат я использовал медный купорос и обычную поваренную соль в соотношении на 0,5 литра горячей воды по 2 столовые ложки с горкой медного купороса и поваренной соли. Все это тщательно размешивалось в воде и раствор готов. Но в этот раз попробовал иной рецепт, очень дешевый и доступный.
Рекомендуемый способ приготовления травильного раствора:
В 100 мл аптечной 3% перекиси водорода растворяется 30 г лимонной кислоты и 2 чайные ложки поваренной соли. Этого раствора должно хватить для травления площади 100 см2. Соль при подготовке раствора можно не жалеть. Так как она играет роль катализатора и в процессе травления практически не расходуется.
После приготовления раствора, печатную плату необходимо опустить в емкость с раствором и наблюдать за процессом травления, тут главное не передержать. Раствор съест непокрытую тонером поверхность меди, как только это произойдет плату необходимо достать и промыть холодной водой, далее ее нужно просушить и снять с поверхности дорожек тонер при помощи ватки и растворителя. Если в вашей плате предусмотрены отверстия для крепления радиодеталей или крепежа, самое время просверлить их. Я опустил эту операцию по причине того что это всего лишь макетный драйвер шагового двигателя, предназначенный для освоения новых для меня технологий.
Приступаем к лужению дорожек. Это необходимо сделать чтобы облегчить себе работу при пайке. Раньше я лудил при помощи припоя и канифоли, но скажу это «грязный» способ. От канифоли много дыма и шлака на плате который нужно будет смывать растворителем. Я применил другой способ, лужение глицерином. Глицерин продается в аптеках и стоит копейки. Поверхность платы необходимо протереть ваткой смоченной в глицерине и наносить припой паяльником точными мазками. Поверхность дорожек покрывается тонким слоем припоя и остается чистой, лишний глицерин можно удалить ваткой или промыть плату в воде с мылом. К сожалению у меня нет фотографии полученного результата, после лужения, но получившееся качество впечатляет.
Далее необходимо припаять все радиодетали на плату, для пайки SMD компонентов я использовал пинцет. В качестве флюса использовал глицерин. Получилось очень даже аккуратно.
Результат налицо. Конечно после изготовления плата выглядела лучше, на фото она уже после многочисленных экспериментов (для этого она и создавалась).
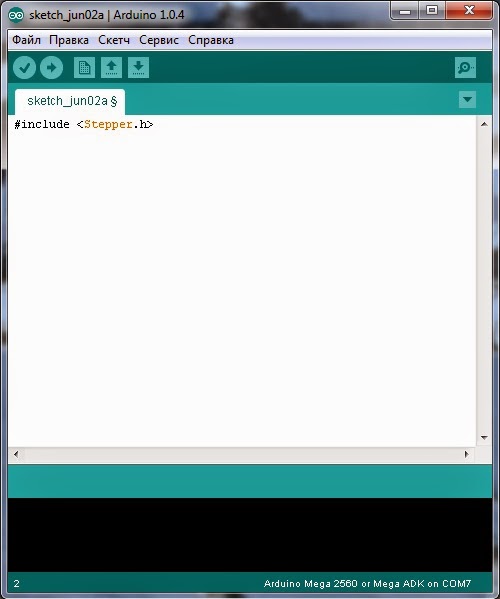
Листинг программы:
/*
* Тестовая программа для шаговика
*/
#include
#define STEPS 200
Stepper stepper(STEPS, 31, 33, 35, 37);
void setup()
<
stepper.setSpeed(50);
>
void loop()
<
stepper.step(200);
delay(1000);
>
Данная управляющая программа заставляет делать один полный оборот вала шагового двигателя, после перерыва длительностью в одну секунду, повторяется до бесконечности. Можно поэкспериментировать со скоростью вращения, направлением вращения а также углами поворотов.
Драйвер шагового двигателя (версия 2)
Источник