- «Шаговый двигатель 28BYJ-48-5V с драйвером на ULN2003» — Урок № 8
- Новости
- Последнее из блога
- ULN2003 драйвер нагрузок на 7 каналов, ULN2803 — на 8 каналов
- Основные параметры ULN2003А, ULN2004А
- Схема одного из каналов в микросхемах ULN2003A, ULQ2003A и ULN2003AI.
- Управление ULN2003
- Схема включения ULN2003.
- Аналоги ULN2003
- 8-ми канальный драйвер нагрузки ULN2803A, ULN2804A
- Драйверы нагрузки ULN2023A, ULN2024A
- Простой в изготовлении контроллер шагового двигателя из старых деталей
«Шаговый двигатель 28BYJ-48-5V с драйвером на ULN2003» — Урок № 8
Скоро на моём канале в YOUTUBE появится новый урок «Шаговый двигатель 28BYJ-48-5V с драйвером на ULN2003».
Характеристики
- Номинальное напряжение: 5 В
- Угол шага 5,625 ° / 64
- Передаточное отношение редуктора:1/64
- Частота 100 Гц/> Сопротивление постоянному току 50Ω ± 7% (25 ℃)
- Крутящий момент> 34.3mN.m (120 Гц)
- Момент трения 600-1200 gf.cm
- Класс изоляции 600VAC/1mA/1s
- Шум Пример из видеоурока
Новости
На выставке CES 2020 также было представлено новое поколение плат Arduino Portenta. Оно было разработано на требовательные промышленные приложения. Portenta H7 поддерживает код Arduino, Python и JavaScript, что делает его доступным для разработчиков с различными знаниями языков .
Производитель Arduino запускает новую серию плат Nano — Arduino Nano 33 BLE. Платы имеют те же размеры, что и плата Ардуино Нано, на чипе U-blox NINA-B306 с микроконтроллером Nordic nRF52840 и беспроводным модулем Bluetooth BLE
Последнее из блога
Работа с файлами blob. Рассмотрим как узнать blob size и blob type. Научимся загружать в mysql blob картинки. Изучим blob тип данных.
Сегодня я расскажу как использовать старый, ненужный пульт от телевизора или другой радиоаппаратуры. У вас наверняка таких скопилось много и они лежат и пылятся. Так давайте подарим им новую жизнь. А также можно использовать не старый, а действующий пульт. Ведь на нём так много лишних кнопок. Короче, нам нужен пульт. Сделаем управление блоком реле с пульта, а что подключить к реле решайте сами. Нам понадобится Ардуино, реле, ИК приёмник, и пульт управления.
Источник
ULN2003 драйвер нагрузок на 7 каналов, ULN2803 — на 8 каналов
В 16-выводном корпусе ULN2003 размещены 7 транзисторов Дарлингтона, которые способны управлять нагрузками с током до 500 мА и напряжением до 50 В на канал.

Спектр применений ULN2003 весьма широк:
- логические буферы,
- управление реле и электромагнитными клапанами,
- управление шаговыми двигателями и щеточными двигателями постоянного тока,
- управление светодиодными и газоразрядными индикаторами.
Основные параметры ULN2003А, ULN2004А
- напряжение коллектор-эмиттер выходного ключа — 50 В,
- пиковый ток коллектора — 500 мА,
- суммарный ток всех каналов протекающий через общий вывод — 2,5 А,
- диапазон рабочих температур -60°C..150°C.
На самом деле существует несколько типов похожих транзисторных сборок начнем с самой распространенной 2003 серии.
Схема одного из каналов в микросхемах ULN2003A, ULQ2003A и ULN2003AI.

Каждый из семи каналов содержит по два биполярных транзистора, резистор 2,7 кОм ограничивающий базовый ток, и два резистора на 7,2 кОм и 3 кОм защищающие транзисторы от открывания обратным током коллектора. Кроме того к схеме добавлены три защитных диода: первый защищает вход от отрицательного напряжения, два других защищают выход от отрицательного напряжения и от превышения напряжения на транзисторах выше питающего.
Наличие защитных выходных диодов актуально при работе на индуктивную нагрузку: диод для шунтирования обмотки реле или обмотки шагового двигателя уже встроен в микросхему и не нужно устанавливать внешний диод. А при использовании 7 каналов – 7 внешних диодов.
Управление ULN2003
Входная часть сборок ULN2003A, ULN2003AI, ULQ2003A спроектирована так чтобы работать совместно с ТТЛ и 3,3 В и 5 В К-МОП логикой.
ULN2002A создана для p-МОП логики.
Во входных цепях ULN2002A добавлен стабилитрон на 7 В и увеличено сопротивление базового резистора до 10,5 кОм, благодаря этому сборка может работать с входными напряжениями от 14 до 25 В.

Сборка ULN2004A, ULQ2004A предназначена для К-МОП логики с уровнем напряжений от 6 до 15В.
По сравнению с ULN2003, у ULN2004 просто увеличено сопротивление базового резистора до 10,5 кОм.

Как можно видеть на структурной схеме, входы и выходы расположены напротив друг друга, что весьма удобно при разводке печатной платы.

ULN2003 выпускается как для объемного монтажа: PDIP, так и для поверхностного: SOIC, SOP и TSSOP.
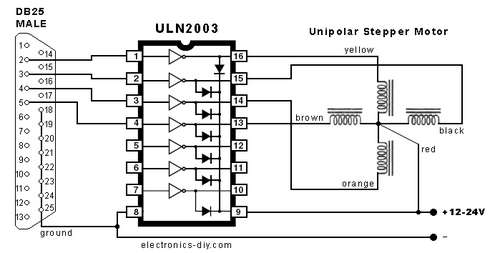
Схема включения ULN2003.
Одной ULN2003 можно управлять сразу 7 нагрузками, но когда нету такого количества нагрузок, то для увеличения надежности можно объединять каналы. Например 1,2 каналы использовать для первой обмотки; 3,4 для второй обмотки, а 5,6,7 для третьей.

Аналоги ULN2003
Разные зарубежные производители выпускают свои аналоги ULN2003: L203, MC1413, SG2003, TD62003. Так же есть и отечественный аналог: К1109КТ22.
8-ми канальный драйвер нагрузки ULN2803A, ULN2804A
Для работы с микроконтроллерами может быть более удобнымы 8-ми канальные драйверы. И у семиканальных ULN2003, ULN2004 есть их восьмиканальные братья ULN2803, ULN2804.

Точно также как и ULN2003 — ULN2803 рассчитан на управление от ТТЛ-логики и низковольной К-МОП, а ULN2804 от К-МОП питающейся в диапазоне 6 .. 15 В. Отличия ULN280X от ULN200X только в дополнительном канале и 18-выводном корпусе.
У ULN2803А есть отечественный аналог: К1109КТ63.
Драйверы нагрузки ULN2023A, ULN2024A
Третья двойка в названии сборки вместо нуля означает, что выходное напряжение может достигать 95 В, в остальном параметры и схемотехника этих сборок повторяют своих собратьев.
14 thoughts on “ ULN2003 драйвер нагрузок на 7 каналов, ULN2803 — на 8 каналов ”
ULN2003A не только как драйвер микроконтроллера хороша (предполагаю, что в 1976 году её точно с микроконтроллерами никто не использовал ), но и например как драйвер для 74HC595. С помощью 3-х выводов микроконтроллера управляем 74HC595, и получаем масштабируемое решение по управлению реле, шаговыми двигателями, светодиодами т.е. там где не нужны большие частоты.
Ну, не знаю… я ее в первый раз увидел в конце 90_х ковыряя термоконтроллер изготовленный в Великобритании в конце 70_х годов прошлого века. Устройство было на микроконтроллере, а ULN2003A работали в нем драйверами семисегментного светодиодного индикатора. Децимальная точка там не отображалась, и для индикации нужной информации достаточно было семи ключей. Думаю, семь ключей в этой микросхеме только из-за ограничений выбранного для нее корпуса.
Назрел вопрос — что-то подобное в более многоногих корпусах существует? Так то я всегда пользовался логикой с открытым коллектором или транзисторными ключами, но чисто на перспективу хотелось бы знать. И еще немного не в тему — не выпускались ли импортные аналоги К155ИД1? Довольно актуально сейчас в любительской практике, когда вернулась мода на газоразрядные индикаторы.
Импортный аналог К155ИД1 — SN74141N от TI, можно взять на алиэкспрессе от полутора долларов за штучку. Я считаю что это дорого.
Если нужно управлять ровно байтом (например семисегментный индикатор и точка) то подойдет аналог ULN2003A в 18 выводном корпусе — ULN2803A. С большим числом каналов драйверы не попадались.
Спасибо за подсказку. Но да, цены совершенно негуманные. Дешевле 1,1 доллара за штуку не нашел, плюс пересылка. На ебее еще страшнее, от 150 руб за штуку. И главное, все в dip корпусах, а я рассчитывал найти импортный аналог в soic… В таком случае возьму наши ИД1, их от 25 руб продают с рук.
Упс! А я только что нашел способ нестандартного использования ULN2003 как драйвера клавиатуры на 7 кнопок. Уровни с кнопок на входы, защитные диоды в качестве шифратора с 7 на 1, а сигнал высокого уровня с вывода 9 будет сигналом разрешения или прерывания, по которому МК будет выполнять процедуру прерывания с опросом состояния клавиатуры. Конечно, 8 линий занятые клавиатурой не есть хорошо. Но при необходимости отправлять контроллер в спячку и быстрого опроса кнопок по прерыванию, да при наличии большого количества свободных выводов, думаю, идея может найти хотя бы ограниченное применение.
Получается, что ULN2003 используется как диодная сборка из 7 диодов с общим катодом, мне кажется что дешевле будет взять две диодных сборки BAV70S — в каждой по две пары диодов с общим катодом, итого получаем 8 входов в более компактных корпусах, да и дешевле выйдет.
Вот вот, насчет низких частот. Этот недостаток ULN2003 обусловлен включением транзисторов по схеме Дарлингтона. Он ее еще до 76-го запатентовал, в 53-м, если память не изменяет. Так, с тех пор, и тянутся за токовыми ключами такого включения все их недостатки: и малая частота, и низкое КПД, и искажения сигнала… А вот используют до сих пор. Мощность при простоте — решают все, по крайней мере для пром автоматики. Клапана, шаговики, реле, подача. Все мощное, грубое и медленное.
Медленное… Как сказать. Типовое время включения 0,1мкс,выключения 0,2мкс.В пору импульсным стабилизатором управлять.
Два защитных диода и на общий провод и на плюс, можно подключать к индуктивной нагрузки без проблем. Удобно контроллер всегда чем то управляет тут легко подключил эту микросхему, которая выдерживает достаточно большой ток. Плохо,что только семь каналов в контролере часто требуется задействовать порт целиком,а это 8 каналов. И добавил бы производитель еще один канал.
В те времена о байтной привязке особо не думали, делали, как в корпус ляжет. В 16-ножечный, минус питание — как раз семь элементов И-НЕ помещалось. Для других целей, можно и другие ключевики найти, их много разных, для разных целей.
В те времена были популярны 14 выводные корпуса DIP14. Два вывода на питание, остается 12: в повторителях и инверторах типа 155ЛН1 — 155ЛН3 по 6 элементов.
Эххх! Не попалась мне эта микросхема раньше. Сделал внуку игрушку — панели с выключателями , шпингалетами, разетками, рекуляторами, моторчиками и «лампочками».Управления сделал на дискретных элементах. Ничего — переделаю. А цена , нас радиолюбителей, не пугает.Работоспособность и удобство — вот главное.
Ничего, что цена не пугает. Особенно, если учесть цену кабеля от пульта управления к игрушке… если я правильно представил себе устройство управления. ЭТО — микросхема управления! А как вы будете ей, или чему другому передавать данное управление: последовательно или параллельно, аналоговым или цифровым методом — вот от чего зависит себестоимость и удобство изделия. А на чем собрана оконечная дискретика, на транзисторных ключах, их сборках или, даже, на банальных релюхах — дело десятое.
Для реле удобно использовать tpic6c595 (tpic6b595) — это 75HC595+ULN2803 выполненное в одном корпусе
Источник
Простой в изготовлении контроллер шагового двигателя из старых деталей
Шаг 1.
От старого сканера:

- 1 шаговый двигатель
- 1 микросхема ULN2003
- 2 стальных прута
Для корпуса: — 1 картонная коробка
- Клеевой пистолет
- Кусачки
- Ножницы
- Принадлежности для пайки
- Краска
- 1 разъем DB-25 — провод
- 1 цилиндрическое гнездо для питания постоянного тока Для испытательного стенда
- 1 стержень с резьбой
- 1 подходящая под стержень гайка — разные шайбы и шурупы — куски древесины
Для управляющего компьютера:
- 1 старый компьютер (или ноутбук)
- 1 копия TurboCNC ( отсюда)
Шаг 2.
Берем детали от старого сканера. Чтобы построить собственный ЧПУ контроллер нужно для начала извлечь из сканера шаговый двигатель и плату управления. Здесь не приведено никаких фотографий, потому что каждый сканер выглядит по-своему, но обычно нужно просто снять стекло и вывернуть несколько винтов. Кроме двигателя и платы можно оставить еще металлические стержни, которые потребуются для тестирования шагового двигателя.
Шаг 3.
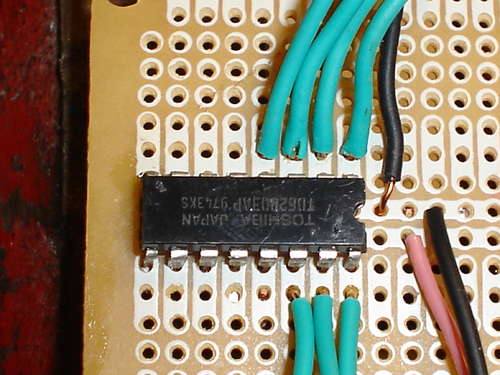
Извлекаем микросхему из платы управления Теперь нужно найти на плате управления шаговым двигателем микросхему ULN2003. Если вы не смогли обнаружить ее на своем устройстве, ULN2003 можно купить отдельно. Если она есть, ее нужно выпаять. Это потребует некоторого умения, но не так уж сложно. Сначала при помощи отсоса удалите как можно больше припоя. После этого осторожно просуньте под микросхему конец отвертки. Осторожно прикоснитесь концом паяльника к каждому выводу, продолжая при этом нажимать на отвертку.

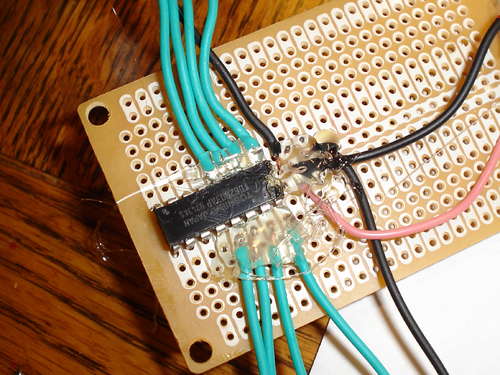
Шаг 4.
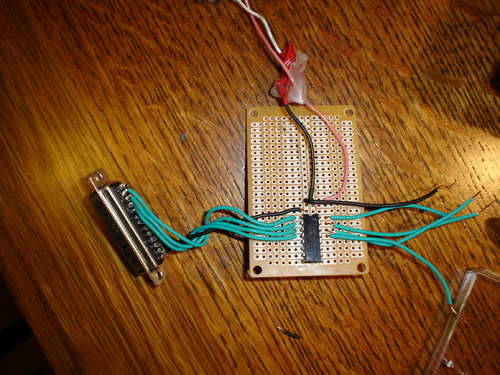
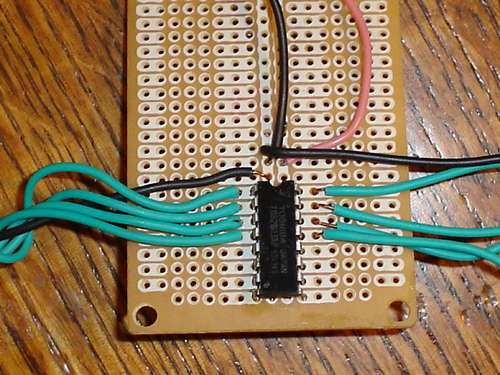
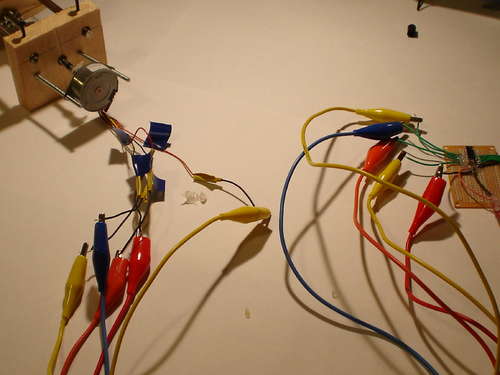
Пайка Теперь нам нужно припаять микросхему на макетную плату. Припаяйте к плате все выводы микросхемы. На показанной здесь макетной плате имеется две шины электропитания, поэтому положительный вывод ULN2003 (смотрите схему здесь и на рисунке ниже) припаивается к одной из них, а отрицательный — к другой. Теперь, нужно соединить вывод 2 коннектора параллельного порта с выводом 1 ULN2003. Вывод 3 коннектора параллельного порта соединяется с выводом 2 ULN2003, вывод 4 — с выводом 3 ULN2003 и вывод 5 — с выводом 4 ULN2003. Теперь вывод 25 параллельного порта припаивается к отрицательной шине питания. Далее к управляющему устройству припаивается мотор. Делать это придется путем проб и ошибок. Можно просто припаять провода так, чтобы потом цеплять на них крокодилы. Еще можно использовать клеммы с винтовым креплением или что-нибудь подобное. Просто припаяйте провода к выводам 16, 15, 14 и 13 микросхемы ULN2003. Теперь припаяйте провод (желательно черный) к положительной шине питания. Управляющее устройство почти готово. Наконец, подсоедините к шинам электропитания на макетной плате цилиндрическое гнездо для питания постоянного тока. Чтобы провода не могли отломаться, их закрепляют клеем из пистолета.


Шаг 5.
Установка программного обеспечения Теперь о программном обеспечении. Единственная вещь, которая точно будет работать с вашим новым устройством — это Turbo CNC. Скачайте его здесь. Распакуйте архив и запишите на CD. Теперь, на компьютере, который вы собираетесь использовать для управления, перейдите на диск C:// и создайте в корне папку «tcnc». Затем, скопируйте файлы с CD в новую папку. Закройте все окна. Вы только что установили Turbo CNC.
Шаг 6.
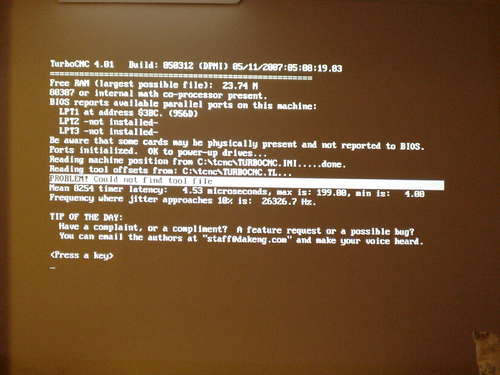
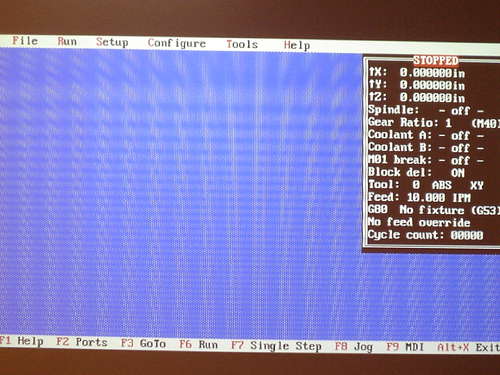
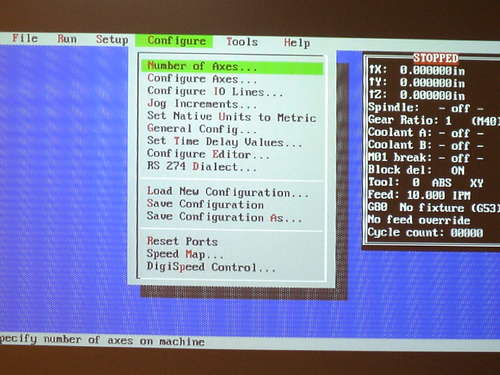
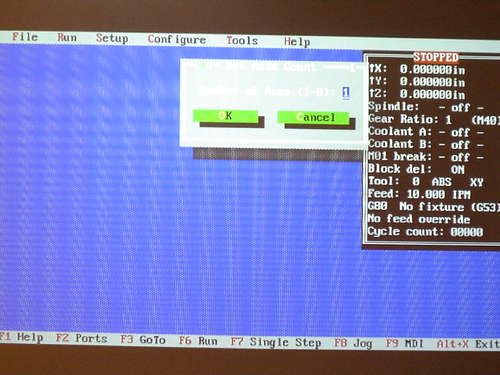
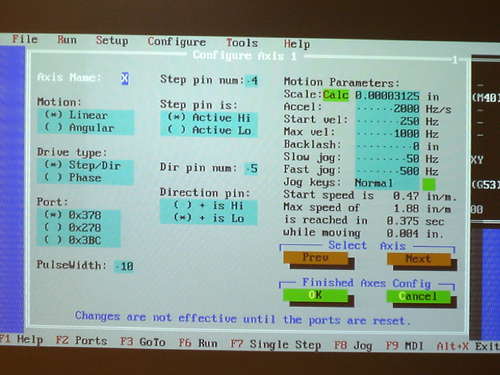
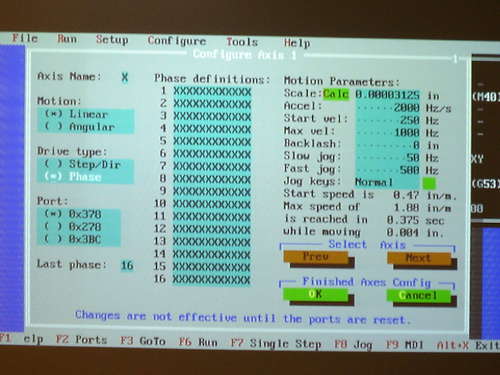
Настройка программного обеспечения Перезагрузите компьютер чтобы перейти к работе в MS-DOS. В командной строке наберите «C: cncTURBOCNC». Иногда лучше использовать загрузочный диск, тогда копия TURBOCNC помещается на него и нужно набирать, соответственно «A: cncTURBOCNC». Возникнет экран, похожий на изображенный на рис. 3. Нажмите пробел. Теперь вы находитесь в главном меню программы. Нажмите F1, и при помощи клавиш со стрелками выберите меню «Configure». При помощи клавиш со стрелками выберите «number of axis». Нажмите Enter. Введите количество осей, которые будут использоваться. Поскольку у нас только один мотор, выбираем «1». Нажмите Enter чтобы продолжить. Снова нажмите F1 и в меню «Configure» выберите пункт «Configure axes», затем дважды нажмите Enter.
Появится следующий экран. Нажимайте Tab пока не перейдете к ячейке «Drive Type». При помощи стрелки вниз выберите пункт «Phase». Снова при помощи Tab выберите ячейку «Scale». Чтобы использовать калькулятор, нам нужно найти число шагов, которые двигатель делает за один оборот. Зная номер модели двигателя, можно установить на сколько градусов он поворачивается за один шаг. Чтобы найти число шагов, которые двигатель делает за один оборот, теперь нужно поделить 360 на число градусов за один шаг. Например, если мотор поворачивается за один шаг на 7,5 градусов, 360 поделить на 7,5 получится 48. Число, которое получится у вас, забейте в калькулятор шкалы (scale calculator).
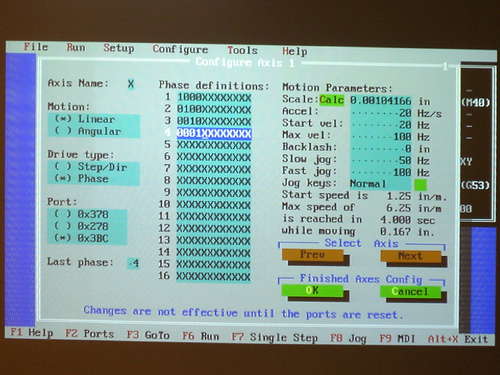
Остальные настройки оставьте как есть. Нажмите OK, и скопируйте число в ячейке Scale в такую же ячейку на другом компьютере. В ячейке Acceleration установите значение 20, поскольку установленных по умолчанию 2000 слишком много для нашей системы. Начальную скорость установите равной 20, а максимальную — 175. Нажимайте Tab пока не дойдете до пункта «Last Phase». Установите в нем значение 4. Нажимайте Tab пока не дойдете до первого ряда иксов.
Скопируйте следующее в четыре первых ячейки:
1000XXXXXXXX
0100XXXXXXXX
0010XXXXXXXX
0001XXXXXXXX
Остальные ячейки оставьте без изменений. Выберите OK. Теперь вы настроили программное обеспечение.

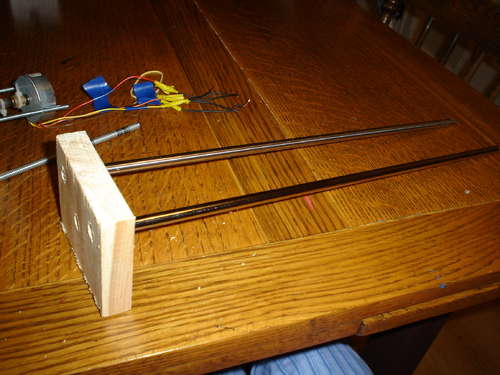
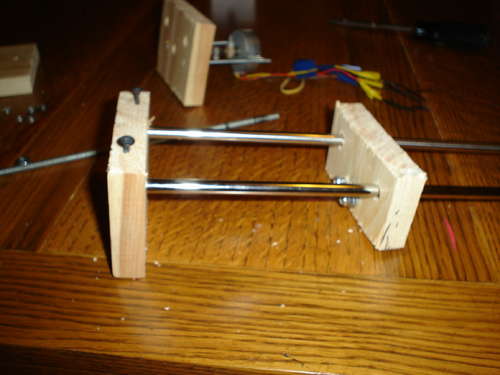
Шаг 7.
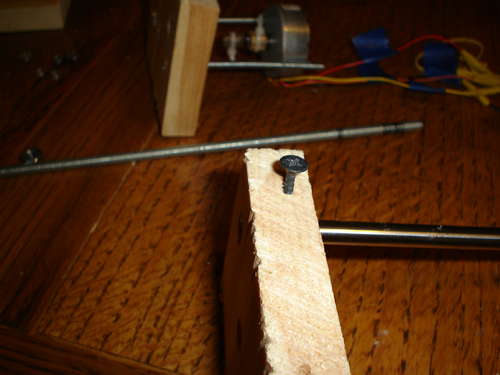
Строим тестовый вал Следующим этапом работы будет сборка простого вала для тестовой системы. Отрежьте 3 бруска дерева и скрепите их друг с другом. Чтобы получить ровные отверстия проведите на поверхности дерева ровную линию. Просверлите на линии два отверстия. Еще 1 отверстие просверлите посередине ниже первых двух. Отсоедините бруски. Через два отверстия, что находятся на одной линии, проденьте стальные пруты. Чтобы закрепить пруты воспользуйтесь небольшими шурупами. Проденьте пруты сквозь второй брусок. На последнем бруске закрепите двигатель. Не имеет значения, как вы это сделаете, будьте изобретательны.
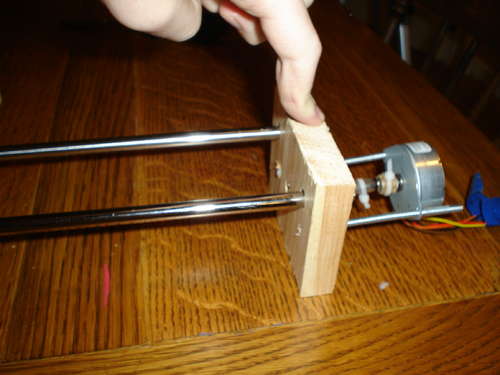
Чтобы закрепить двигатель, имевшийся в наличии, использовали два отрезка стержня с резьбой 1/8. Брусок с прикрепленным двигателем надевается на свободный конец стальных прутов. Снова закрепите их шурупами. Сквозь третье отверстие на первом бруске проденьте стержень с резьбой. Заверните на стержне гайку. Проденьте стержень сквозь отверстие во втором бруске. Поворачивайте стержень до тех пор, пока он не пройдет сквозь все отверстия и не дойдет до вала двигателя. Соедините вал двигателя и стержень при помощи шланга и зажимов из проволоки. На втором бруске гайка удерживается при помощи дополнительных гаек и винтов. В завершение, отрежьте брусок дерева для подставки. Привинтите ее шурупами ко второму бруску. Проверьте, установлена ли подставка ровно на поверхности. Регулировать положение подставки на поверхности можно при помощи дополнительных винтов и гаек. Так делается вал для тестовой системы.





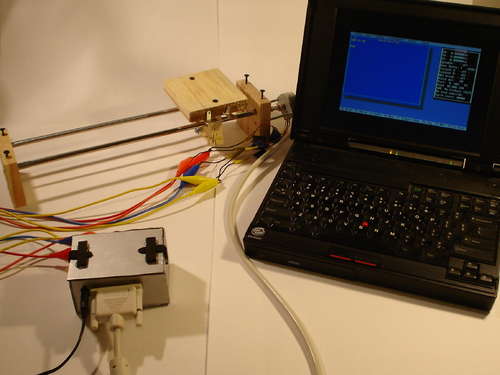
Шаг 8.
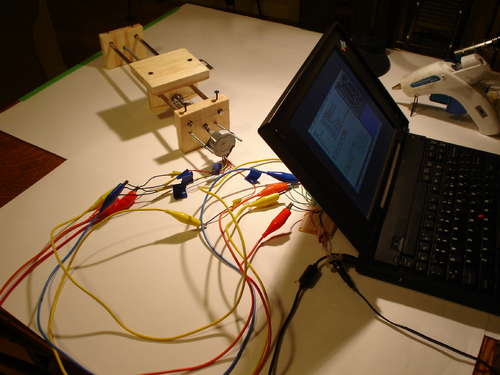
Подсоединяем и тестируем двигатель Теперь нужно соединить двигатель с контроллером. Во-первых, соедините общий провод (смотрите документацию к двигателю) с проводом, который был припаян к положительной шине питания. Другие четыре провода соединяются путем проб и ошибок. Соедините их все, и затем меняйте порядок соединения, если ваш двигатель делает два шага вперед и один назад или что-либо подобное. Для проведения тестирования подключите 12 В 350 мА источник питания постоянного тока в цилиндрическое гнездо. Затем соедините разъем DB25 c компьютером. В TurboCNC проверьте как соединен двигатель. В результате тестирования и проверки правильного подсоединения двигателя у вас должен получиться полностью работоспособный вал. Чтобы проверить масштабирование вашего устройства, прикрепите к нему маркер и запустите тестовую программу. Измерьте получившуюся линию. Если длина линии составляет порядка 2-3 см, устройство работает правильно. В противном случае, проверьте вычисления в шаге 6. Если у вас все получилось, поздравляем, самое трудное уже позади.
Шаг 9.
Изготовление корпуса
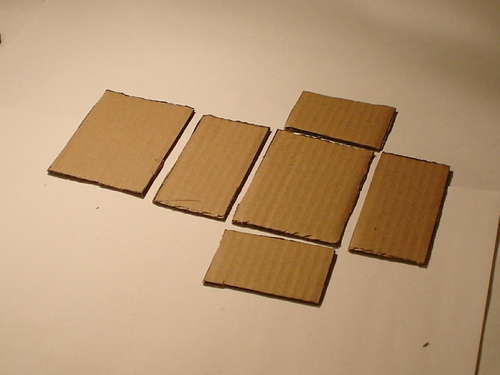
Часть 1
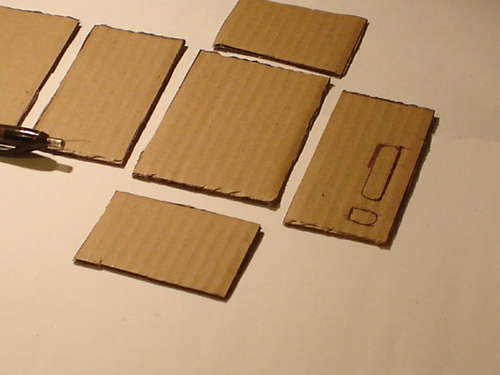
Изготовление корпуса — это завершительный этап. Присоединимся к защитникам природы и сделаем его из вторсырья. Тем более, что контроллер у нас тоже не с магазинных полок. У представленного вашему вниманию образца плата имеет размер 5 на 7,5 см, поэтому корпус будет размером 7,5 на 10 на 5 см, чтобы оставить достаточно места для проводов. Из картонной коробки вырезаем стенки. Вырезаем 2 прямоугольника размером 7,5 на 10 см, еще 2 размером 5 на 10 см и еще 2 размером 7,5 на 5 см (см. рисунки). В них нужно вырезать отверстия для разъемов. Обведите контуры разъема параллельного порта на одной из 5 х 10 стенок. На этой же стенке обведите контуры цилиндрического гнезда для питания постоянного тока. Вырежьте по контурам оба отверстия. То, что вы будете делать дальше, зависит от того, припаивали ли вы к проводам двигателя разъемы. Если да, то закрепите их снаружи второй пока пустой стенки размером 5 х 10. Если нет, проткните в стенке 5 отверстий для проводов. При помощи клеевого пистолета соедините все стенки вместе (кроме верхней, см. рисунки). Корпус можно покрасить.










Шаг 10.
Изготовление корпуса
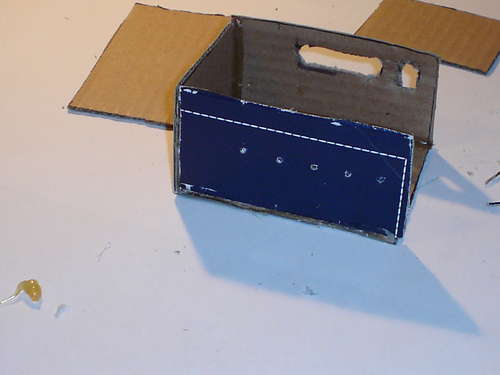
Часть 2
Теперь нужно приклеить все компоненты внутрь корпуса. Убедитесь, что на разъемы попало достаточно много клея, потому что они будут подвергаться большим нагрузкам. Чтобы коробка оставалась закрытой, нужно сделать защелки. Из пенопласта вырежьте пару ушек. Затем вырежьте пару полос и четыре небольших квадратика. Приклейте по два квадратика к каждой из полос как показано на рисунке. Приклейте ушки по обеим сторонам корпуса. Сверху коробки приклейте полосы. Этим завершается изготовление корпуса.

Шаг 11.
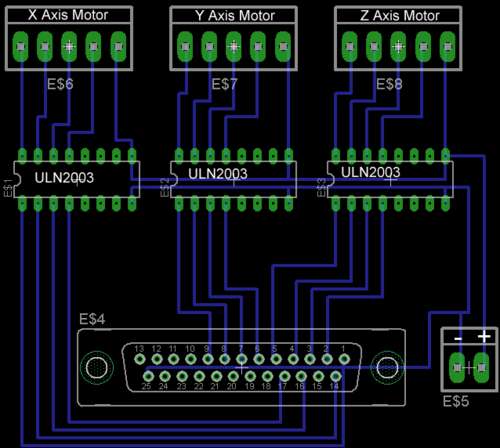
Возможные применения и заключение Этот контроллер можно применять как: — ЧПУ устройство — плоттер — или любую другую вещь, которой нужно точное управление движением. — добавление- Здесь приведены схема и инструкции по изготовлению контроллера с тремя осями. Чтобы настроить программное обеспечение, следуйте вышеуказанным шагам, но в поле «number of axis» введите 3.
Для настройки первой оси делайте все как было сказано выше, для второй оси тоже, но в строках первых четырех фаз введите следующее:
«XXXX1000XXXX
XXXX0100XXXX
XXXX0010XXXX
XXXX0001XXXX»
Для третьей оси в строках первых четырех фаз введите:
«XXXXXXXX1000
XXXXXXXX0100
XXXXXXXX0010
XXXXXXXX0001″
Перевод: Piyavka, по заказу РадиоЛоцман
Источник