- 2 Схемы
- Простой драйвер шагового двигателя
- Схема драйвера шагового двигателя
- Особенности схемы и детали
- Биполярный контроллер шаговых двигателей
- 3d-принтер и ЧПУ станок в одном устройстве своими руками
- Страницы
- воскресенье, 1 июня 2014 г.
- 3. Изготовление драйвера шагового двигателя (для экспериментов).
- Драйвер для 3-фазного шаговика
- Драйвер для 3-фазного шаговика
2 Схемы
Принципиальные электросхемы, подключение устройств и распиновка разъёмов

Простой драйвер шагового двигателя

Предлагается 2 варианта схем простейших драйверов шаговых моторов, реально рабочих, так как информация взята из зарубежных радиоконструкторов (ссылка на оригиналы в конце статьи).
Схема драйвера шагового двигателя
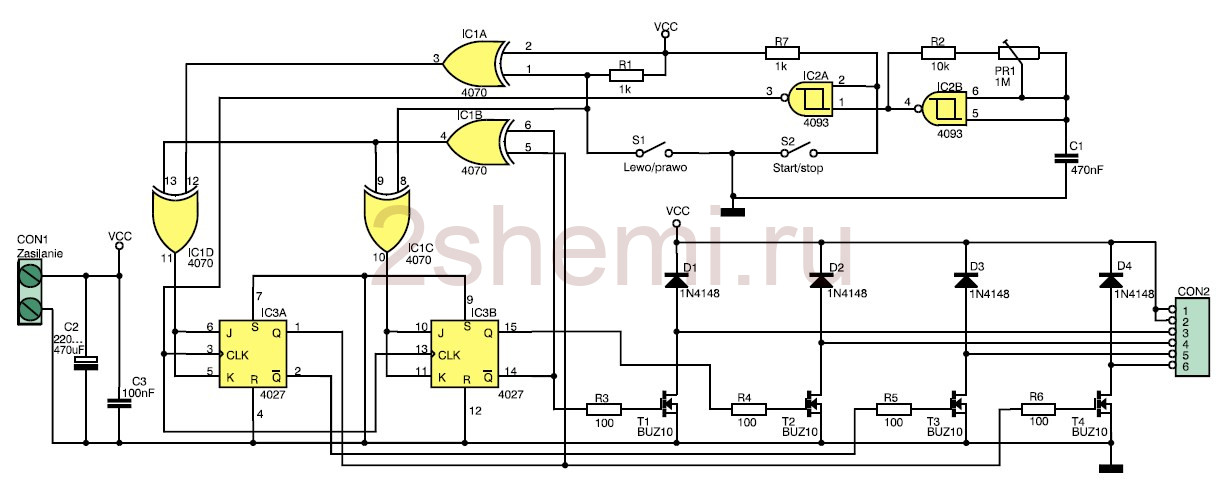
Схема драйвера шагового двигателя не содержит дорогих деталей и программируемых контроллеров. Работа может регулироваться в широком диапазоне с помощью потенциометра PR1. Есть изменение направления вращения двигателя. Катушки шагового двигателя переключаются с помощью четырех МОП-транзисторов T1-T4. Применение в блоке транзисторов большой мощности типа BUZ10 позволит подключить двигатели даже с очень большим током.
Особенности схемы и детали
- управление четырехфазным шаговым двигателем
- плавная регулировка скорости вращения в пределах всего диапазона
- изменение направления вращения мотора
- возможная остановка двигателя
- блок питания 12 В постоянного тока
Детали — IC1: 4070, IC2: 4093, IC3: 4027, T1-T4: BUZ10, BUZ11

Блок драйвер шагового двигателя собран на печатной плате, показанной на рисунке. Монтируем, как правило, начиная с припайки резисторов и панелек для интегральных микросхем, а под конец электролитические конденсаторы и транзисторы большой мощности.

Блок, собранный из проверенных компонентов, не требует настройки и запускается сразу после подачи питания. Со значениями элементов, указанными на схеме, позволяет работать двигателю 5,25” и выполняет изменение скорости вращения в интервале от 40 об./мин. до 5 об./мин.

Биполярный контроллер шаговых двигателей
Схема представляет собой дешевую, и прежде всего легко собираемую альтернативу доступным микропроцессорным биполярным контроллерам шаговых двигателей. Рекомендуется там, где точность управления играет меньшую роль, чем цена и надежность.


Принципиальную схему можно разделить на следующие блоки:
- последовательный чип, генерирующий битовые строки,
- локальный генератор тактового сигнала,
- схема управления питанием катушек,
- выходные буферы Н-моста,
- схемы защиты входных сигналов управления.
Контроллер должен питаться постоянным напряжением, хорошо отфильтрованным, желательно стабилизированным.

Теперь пару слов про H-мосты, которые будут работать с этим драйвером. Они должны принимать на своих входах все возможные логические состояния (00, 01, 10, 11), без риска какого-либо повреждения. Просто в некоторых конфигурациях мостов построенных из дискретных элементов, запрещается одновременное включение двух входов — их естественно нельзя использовать с этим контроллером. Мосты выполненные в виде интегральных микросхем (например L293, L298), устойчивы к этому.

И в завершение третий вариант контроллера, на микросхемах STK672-440, имеющий все необходимые защиты и функции смотрите по ссылке.
Источник
3d-принтер и ЧПУ станок в одном устройстве своими руками
Блог для тех, у кого чешутся руки и есть желание заниматься цифровой техникой и не только цифровой и не только техникой.
Страницы
воскресенье, 1 июня 2014 г.
3. Изготовление драйвера шагового двигателя (для экспериментов).

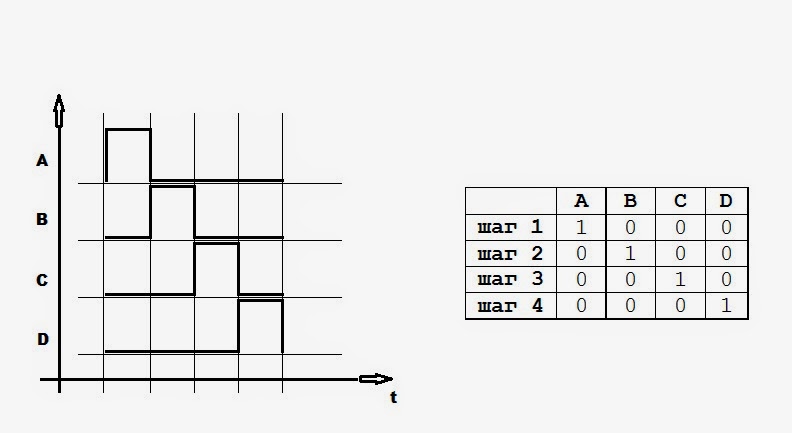
Получается если повторять эту последовательность сигналов ABCD можно вращать ротор электромотора в одну сторону.
А как вращать ротор в другую сторону? Да очень просто, нужно изменить последовательность сигналов с ABCD на DCBA.
А как поворачивать ротор на конкретный заданный угол, например 30 градусов? У каждой модели шагового электромотора есть такой параметр как число шагов. У шаговиков которые я вытащил из матричных принтеров этот параметр 200 и 52, т.е. чтобы совершить полный оборот 360 градусов одним двигателям нужно пройти 200 шагов а другим 52. Получается чтобы повернуть ротор на угол 30 градусов, нужно пройти:
-в первом случае 30:(360:200)=16,666. (шагов) можно округлить до 17 шагов;
-во втором случае 30:(360:52)=4,33. (шага), можно округлить до 4 шагов.
Как видите есть достаточно большая погрешность, можно сделать вывод что чем больше шагов у мотора тем меньше погрешность. Погрешность можно уменьшать если использовать полушаговый или микрошаговый режим работы или механическим способом — использовать понижающий редуктор в этом случае страдает скорость движения.
Как управлять скоростью вращения ротора? Достаточно изменить длительность импульсов подаваемых на входы ABCD, чем длиннее импульсы по оси времени, тем меньше скорость вращения ротора.
Полагаю этой информации будет достаточно чтобы иметь теоретическое представление о работе шаговых электромоторов, все остальные знания можно будет получить экспериментируя.
И так перейдем к схемотехнике. Как работать с шаговым двигателем мы разобрались, осталось подключить его к Arduino и написать управляющую программу. К сожалению напрямую подключить обмотки мотора к выходам нашего микроконтроллера невозможно по одной простой причине — нехватка мощности. Любой электромотор пропускает через свои обмотки достаточно большой ток, а к микроконтроллеру можно подключить нагрузку не более 40 mA (параметры ArduinoMega 2560). Что же делать если есть необходимость управлять нагрузкой например 10A да еще и напряжением 220В? Эту проблему можно решить если между микроконтроллером и шаговым двигателем интегрировать силовую электрическую схему, тогда можно будет управлять хоть трехфазным электромотором который открывает многотонный люк в ракетную шахту :-). В нашем случае люк в ракетную шахту открывать не нужно, нам нужно всего лишь заставить работать шаговый мотор и в этом нам поможет драйвер шагового двигателя. Можно конечно купить готовые решения, на рынке их очень много, но я буду делать свой собственный драйвер. Для этого мне понадобятся силовые ключевые полевые транзисторы Mosfet, как я уже говорил эти транзисторы идеально подходят для сопряжения Arduino с любыми нагрузками.
На рисунке ниже представлена электрическая принципиальная схема контроллера шагового двигателя.
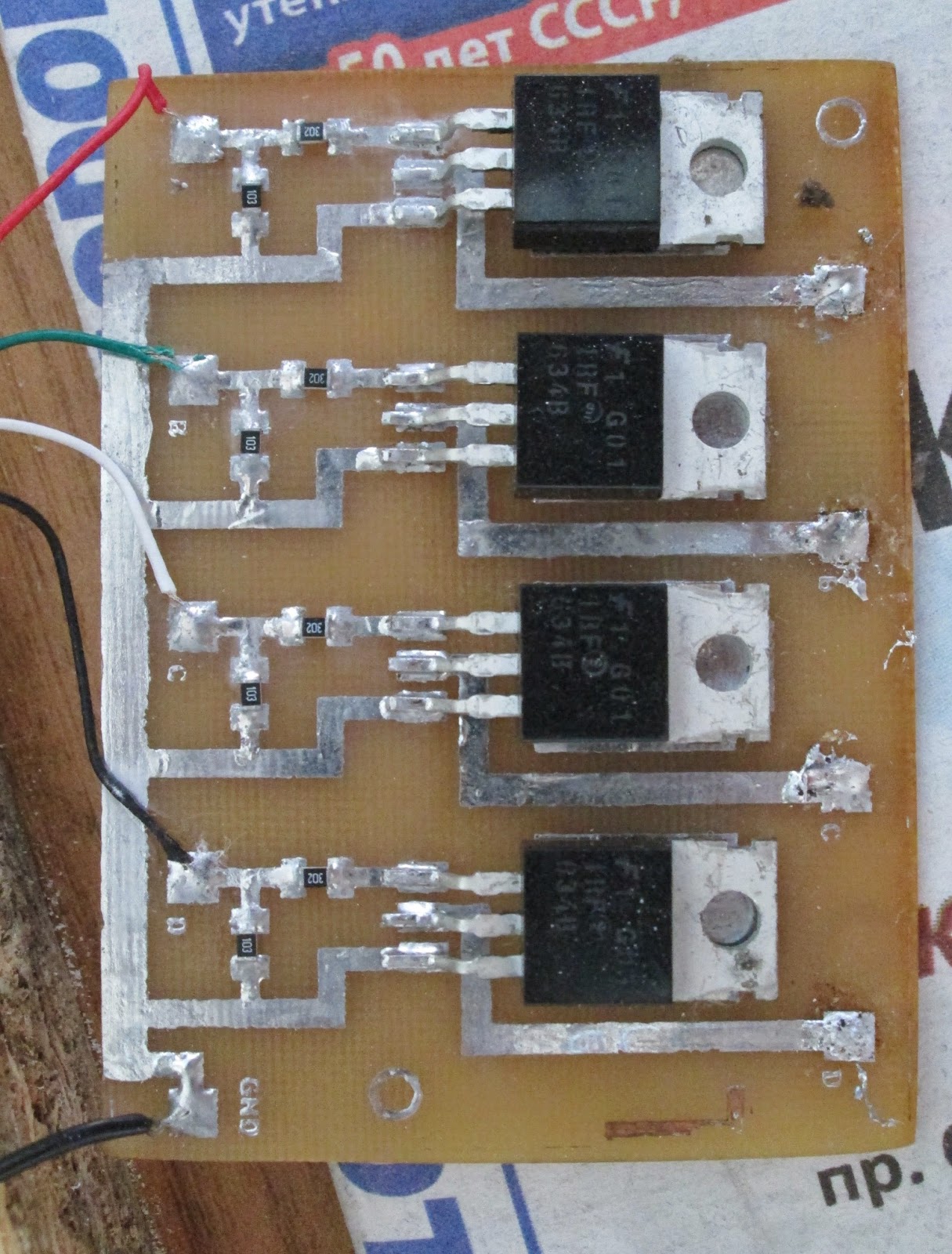
В качестве силовых ключей я применил транзисторы IRF634B максимальное напряжение исток-сток 250В, ток стока 8,1А, этого более чем достаточно для моего случая. Со схемой более менее разобрались будем рисовать печатную плату. Рисовал в встроенном в Windows редакторе Paint, скажу это не самая лучшая затея, в следующий раз буду использовать какой-нибудь специализированный и простой редактор печатных плат. Ниже представлен рисунок готовой печатной платы.
Далее это изображение в зеркальном отражении распечатываем на бумаге при помощи лазерного принтера. Яркость печати лучше всего сделать максимальной, а бумагу нужно использовать не обычную офисную а глянцевую, подойдут обычные глянцевые журналы. Берем лист и печатаем поверх имеющегося изображения. Далее получившуюся картинку прикладываем к заранее подготовленному куску фольгированного стеклотекстолита и хорошенько проглаживаем утюгом в течении 20 минут. Утюг нужно нагреть до максимальной температуры.
Как подготовить текстолит? Во первых его нужно отрезать по размеру изображения печатной платы (при помощи ножниц по металлу или ножовкой по металлу), во вторых зашкурить края мелкой наждачной бумагой, чтобы не осталось заусенцев. Также необходимо пройтись наждачкой по поверхности фольги, снять окислы, фольга приобретет ровный красноватый оттенок. Далее поверхность обработанную наждачной бумагой нужно протереть ваткой смоченной в растворитель (используйте 646 растворитель он меньше воняет).
После прогрева утюгом, тонер с бумаги запекается на поверхность фольгированного стеклотекстолита в виде изображения контактных дорожек. После этой операции плату с бумагой необходимо остудить до комнатной температуры и положить в ванночку с водой примерно на 30 минут. За это время бумага раскиснет и ее нужно аккуратно скатать подушечками пальцев с поверхности текстолита. На поверхности останутся ровные черные следы в виде контактных дорожек. Если у вас не получилось перенести изображение с бумаги и у вас есть огрехи, тогда следует смыть тонер с поверхности текстолита растворителем и повторить все заново. У меня все получилось с первого раза.
После получения качественного изображения дорожек, необходимо вытравить лишнюю медь, для этого нам понадобится травильный раствор который мы приготовим сами. Раньше для травления печатных плат я использовал медный купорос и обычную поваренную соль в соотношении на 0,5 литра горячей воды по 2 столовые ложки с горкой медного купороса и поваренной соли. Все это тщательно размешивалось в воде и раствор готов. Но в этот раз попробовал иной рецепт, очень дешевый и доступный.
Рекомендуемый способ приготовления травильного раствора:
В 100 мл аптечной 3% перекиси водорода растворяется 30 г лимонной кислоты и 2 чайные ложки поваренной соли. Этого раствора должно хватить для травления площади 100 см2. Соль при подготовке раствора можно не жалеть. Так как она играет роль катализатора и в процессе травления практически не расходуется.
После приготовления раствора, печатную плату необходимо опустить в емкость с раствором и наблюдать за процессом травления, тут главное не передержать. Раствор съест непокрытую тонером поверхность меди, как только это произойдет плату необходимо достать и промыть холодной водой, далее ее нужно просушить и снять с поверхности дорожек тонер при помощи ватки и растворителя. Если в вашей плате предусмотрены отверстия для крепления радиодеталей или крепежа, самое время просверлить их. Я опустил эту операцию по причине того что это всего лишь макетный драйвер шагового двигателя, предназначенный для освоения новых для меня технологий.
Приступаем к лужению дорожек. Это необходимо сделать чтобы облегчить себе работу при пайке. Раньше я лудил при помощи припоя и канифоли, но скажу это «грязный» способ. От канифоли много дыма и шлака на плате который нужно будет смывать растворителем. Я применил другой способ, лужение глицерином. Глицерин продается в аптеках и стоит копейки. Поверхность платы необходимо протереть ваткой смоченной в глицерине и наносить припой паяльником точными мазками. Поверхность дорожек покрывается тонким слоем припоя и остается чистой, лишний глицерин можно удалить ваткой или промыть плату в воде с мылом. К сожалению у меня нет фотографии полученного результата, после лужения, но получившееся качество впечатляет.
Далее необходимо припаять все радиодетали на плату, для пайки SMD компонентов я использовал пинцет. В качестве флюса использовал глицерин. Получилось очень даже аккуратно.
Результат налицо. Конечно после изготовления плата выглядела лучше, на фото она уже после многочисленных экспериментов (для этого она и создавалась).
Листинг программы:
/*
* Тестовая программа для шаговика
*/
#include
#define STEPS 200
Stepper stepper(STEPS, 31, 33, 35, 37);
void setup()
<
stepper.setSpeed(50);
>
void loop()
<
stepper.step(200);
delay(1000);
>
Данная управляющая программа заставляет делать один полный оборот вала шагового двигателя, после перерыва длительностью в одну секунду, повторяется до бесконечности. Можно поэкспериментировать со скоростью вращения, направлением вращения а также углами поворотов.
Драйвер шагового двигателя (версия 2)
Источник
Драйвер для 3-фазного шаговика
Тема раздела Драйверы и контроллеры для CNC в категории Станки ЧПУ, Hobby CNC, инструмент; Помогите определиться какую схему использовать для 3-фазного шагового двигателя. Параметры двигателя (фото прилагаю) 4 вывода включен в звезду с выводом .
Опции темы
Драйвер для 3-фазного шаговика
Помогите определиться какую схему использовать для 3-фазного шагового двигателя.
Параметры двигателя (фото прилагаю) 4 вывода включен в звезду с выводом от центра.
Сопротивление каждой обмотки 2,2 ома.На сайте производителя JAPAN SERVO описния нет
наверное потому что старый 1972 год. Может есть микросхема для управления 3-фазным шаговым двигателем. есть плата с того же аппарата что и двигатель там выходные ключи на мощных транзисторах 2N6058(дарлингтона) остальная обвязка сильно накрученая на микросхемах SN74..
серии.Посоветуйте.

SI-7600 — a control IC used with power MOSFET array to drive a 3-phase stepper motor.
Только, боюсь, радости от этого мало — ее еще найти надо (если продолжают выпускать).
Сделать самому !
пиши на майл помогу !
Валяется статор от автомобильного генератора 24в. Не поленился подсчитать 18полюсов, это 6 шагов на оборот и12 в полу шаге, внутренний Ф87мм., внешний Ф132мм., ширина набора 27мм., ширина с обмоткой 47мм. Если такарка на халяву, можно ротор из магнита от динамика мощного, два краба и немагнитная ось. Если крышки переточить, то вся толщина 50-60мм мотора. А с фрезером можно в каждом полюсе прорезь, уже 24 в полушаге. Для строптивых, можно в перемотке упражняться.
Грубая сила.
Почему замолчали . Помогите со схемой.
Давай алгоритм управления, а я подумаю как его оживить !
Двигателя будут использоватся 3-х кординатном фрезерном станке.
Алгоритм такой же как и для обычных программ управления.
Только я непойму при чем здесь автомобильный генератор.
Если это будет так выглядеть
Последний раз редактировалось STEPMOTOR; 04.04.2009 в 13:51 .
Если это будет так выглядеть
Сделал схему в принципе работает но пропускает много шагов а бывает при подачи одного импульса
делает несколько шагов.Как сэтим боротся.транзисторы мощные полевые SMD использую от материнок И можно при использовании одного контроллера управлять
двумя двигателями X Y ИЛИ ставить надо 2 пика
Ок !
Проверю прошивку выложу завтра.
+ добавлю в прошивку управление вторым движком !
Прошивка c добавленной второй осью и исправлениями :Вложение 35571
Схему чето ни в каком виде добавить немогу , форум глючит !
попозже попробую.
Последний раз редактировалось STEPMOTOR; 04.04.2009 в 13:51 .
Прошивка c добавленной второй осью и исправлениями :Вложение 35571
Схему чето ни в каком виде добавить немогу , форум глючит !
попозже попробую.
Схема открылась а прошивку не могу взять выложи еще раз или отправ пожалуйста на e-mel
wowikpi@rambler.ru
и мне плиз.
oldabrikos@hotbox.ru
 oldabrikos@hotbox.ru
oldabrikos@hotbox.ru
Народ, а нельзя ли перепрошить какой нибудь обычный контроллер безколлекторника?
у них там вроде атмеги стоят?
т.е. просто чтоб внаглую, без обратной связи.
там же и схема и техника вся уже отработана.
Посмотрите мой вариант схемы управления трех-фазным униполярным шаговым двигателем. За основу взята схема управления шести-фазным шаговым двигателем ШД-5 из журнала «Радио». Управление сигналами Step/Dir. Схема разрабатывалась для различных экспериментов с шаговыми двигателями. К ней можно подключить шаговые двигатели как трех-фаные, так и четырех- и шести-фазные. Возможно управление двигателем через СОМ порт или даже двумя трех-фаными двигателями. В приложении кроме схемы, платы есть прошивка для управления трех-фазным двигателем. Схема проверена с двигателем SM-024-0035-TG и двигателем ШД-5 (шестифазным в режиме трехфазного). В программе регулировка тока пока не реализована. Поэтому для питания двигателей на контакт Х1-4 подаю 5В, чтобы не попалить транзисторы и не перегревать двигатель. Да и при питании от 12В вырубается источник питания ( я использовал компьютерный). Ток через двигатель 1.3А и 4.5А для моих двигателей. Интересно а какие трех-фазные двигатели применяете вы. Я чаще всего встречал четырех-фазные. Чуть не забыл написать про подключение двигателя. Общий провод двигателя к Х3-2, три фазы к Х3-8, Х3-7 и Х3-6
Вот еще один вариант прошивки для управления трехфазным двигателем. Теперь в микрошаговом режиме. Дробление шага 1/4 за счет ШИМ. Возможно и другое дробление шага. Подключение двигателя немного другое. Общий провод двигателя к Х3-2, три фазы к Х3-4, Х3-5 и Х3-6. По плану сделать уменьшение тока при простое двигателя, настройка под параметры двигателя не в прошивке, а через СОМ порт. А также управление четырехфазным двигателем в микрошаговом режиме, но для этого нужно переделывать схему.
Прошивка что-то не присоеденилась.
Источник