- Как сделать простейший драйвер для двигателя старого HDD
- Схемные особенности
- Изготовление устройства
- Смотрите видео
- 3d-принтер и ЧПУ станок в одном устройстве своими руками
- Страницы
- воскресенье, 1 июня 2014 г.
- 3. Изготовление драйвера шагового двигателя (для экспериментов).
- Как сделать драйвер для светодиода
- Как сделать драйвер для светодиодов
- Необходимые материалы и инструменты
- Схема простого драйвера для светодиода 1 Вт
- Схема мощного драйвера с входом ШИМ
- Особенности драйвера
- Принцип действия
- Сборка и настройка драйвера
- Заключение
Как сделать простейший драйвер для двигателя старого HDD
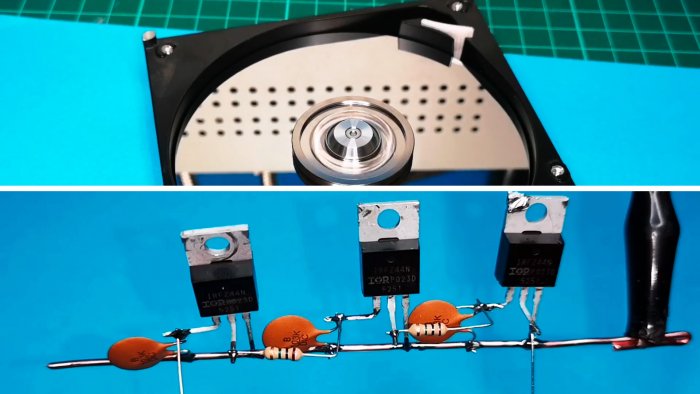
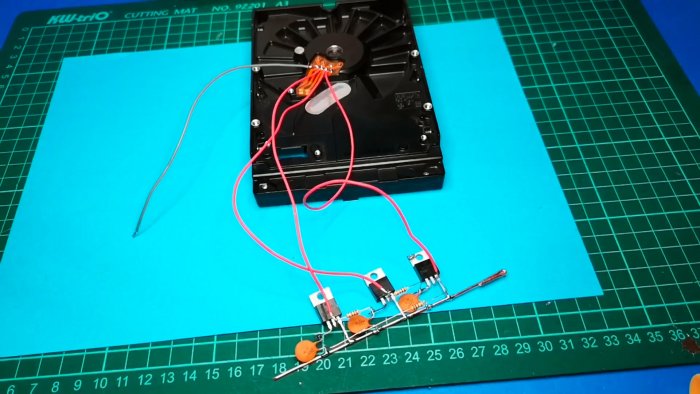
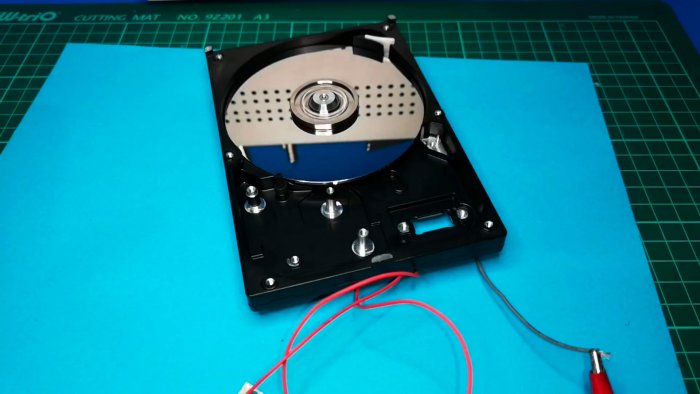
Устройство представляет собой электронный коммутатор и предназначено для работы с маломощными бесколлекторными (иначе бесщеточными) электродвигателями при условии соединения их обмоток звездой. Типичный пример таких агрегатов — привод дисковода классических винчестерских дисков персональных компьютеров.
Отличается схемной простотой и собирается на недефицитных деталях, которые хорошо представлены в интернет-торговле.
Схемные особенности
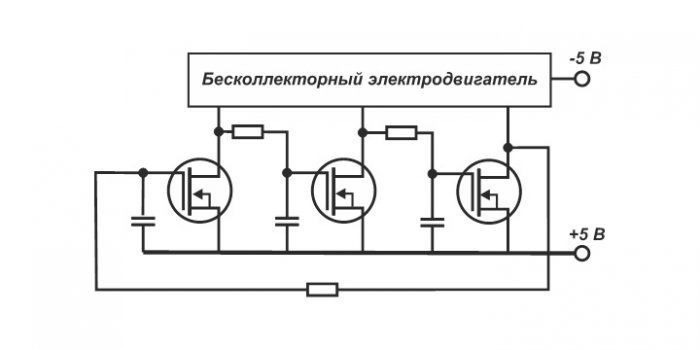
Устройство выполнено по схеме 3-фазного мультивибратора на полевых транзисторах с изолированным затвором, отдельные однотранзисторные каскады которого имеют идентичную структуру и соединены в кольцо. Каждый предыдущий каскад такого кольца управляет функционированием транзистора последующего. Стоки транзисторов соединены с обмотками двигателя напрямую.
Время нахождения транзисторов схемы в активном состоянии определяется последовательной RC-цепочкой, напряжение со средней точки которой подается на затвор.
Принципиальная схема устройства представлена на рисунке.
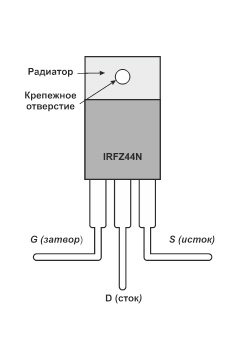
Транзисторы снабжены пластинчатым радиатором, который имеет прямую гальваническую связь со стоком. С учетом невысокой мощности управляемого бесколлекторного электродвигателя необходимость фиксации радиатора на корпусе с низким тепловым сопротивлением отсутствует. Цоколевка и рекомендуемое при сборке направление изгиба выводов представлены на рисунке.
Изготовление устройства
Схема устройства достаточно проста и не требует обязательного применения монтажной платы. С учетом ее рядной структуры в качестве силового несущего элемента может быть использована проволочная шина диаметром 1 – 2 мм, которая соединяется с плюсом источника питания. Общий вывод обмоток подключается на минус источника питания.
Подключается к трехфазному двигателю жесткого диска с общим проводом.

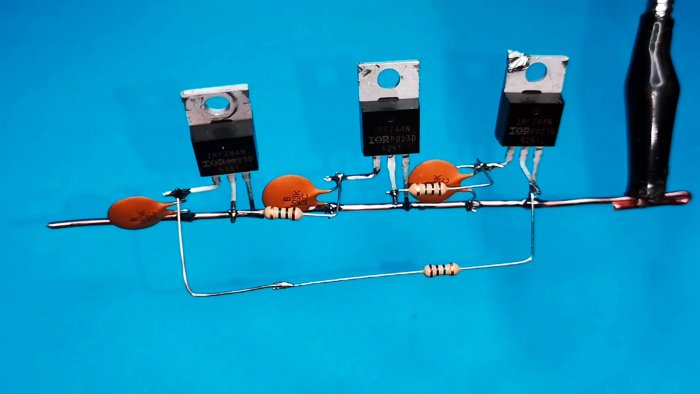
При сборке необходимо контролировать отсутствие коротких замыканий между отдельными неизолированными соединениями, при необходимости применяют кембрики.
Устройство при отсутствии ошибок в схеме начинает функционировать немедленно после подачи постоянного напряжения. Частоту вращения ротора двигателя можно менять заменой конденсаторов или резисторов, причем все устанавливаемые пассивные компоненты должны иметь одинаковый номинал.
Смотрите видео
Источник
3d-принтер и ЧПУ станок в одном устройстве своими руками
Блог для тех, у кого чешутся руки и есть желание заниматься цифровой техникой и не только цифровой и не только техникой.
Страницы
воскресенье, 1 июня 2014 г.
3. Изготовление драйвера шагового двигателя (для экспериментов).

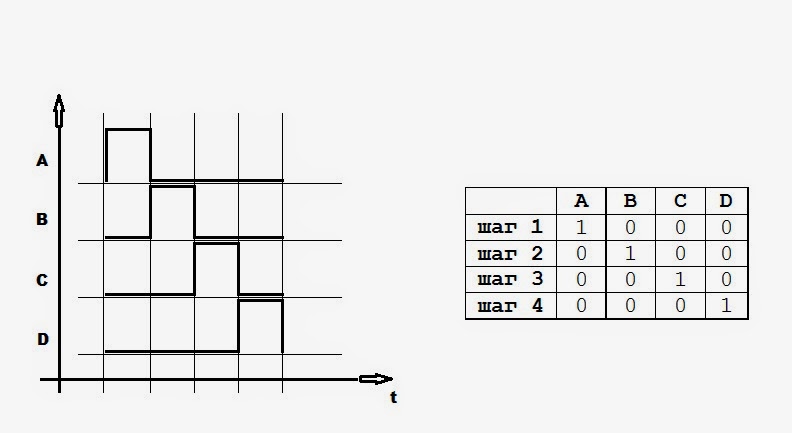
Получается если повторять эту последовательность сигналов ABCD можно вращать ротор электромотора в одну сторону.
А как вращать ротор в другую сторону? Да очень просто, нужно изменить последовательность сигналов с ABCD на DCBA.
А как поворачивать ротор на конкретный заданный угол, например 30 градусов? У каждой модели шагового электромотора есть такой параметр как число шагов. У шаговиков которые я вытащил из матричных принтеров этот параметр 200 и 52, т.е. чтобы совершить полный оборот 360 градусов одним двигателям нужно пройти 200 шагов а другим 52. Получается чтобы повернуть ротор на угол 30 градусов, нужно пройти:
-в первом случае 30:(360:200)=16,666. (шагов) можно округлить до 17 шагов;
-во втором случае 30:(360:52)=4,33. (шага), можно округлить до 4 шагов.
Как видите есть достаточно большая погрешность, можно сделать вывод что чем больше шагов у мотора тем меньше погрешность. Погрешность можно уменьшать если использовать полушаговый или микрошаговый режим работы или механическим способом — использовать понижающий редуктор в этом случае страдает скорость движения.
Как управлять скоростью вращения ротора? Достаточно изменить длительность импульсов подаваемых на входы ABCD, чем длиннее импульсы по оси времени, тем меньше скорость вращения ротора.
Полагаю этой информации будет достаточно чтобы иметь теоретическое представление о работе шаговых электромоторов, все остальные знания можно будет получить экспериментируя.
И так перейдем к схемотехнике. Как работать с шаговым двигателем мы разобрались, осталось подключить его к Arduino и написать управляющую программу. К сожалению напрямую подключить обмотки мотора к выходам нашего микроконтроллера невозможно по одной простой причине — нехватка мощности. Любой электромотор пропускает через свои обмотки достаточно большой ток, а к микроконтроллеру можно подключить нагрузку не более 40 mA (параметры ArduinoMega 2560). Что же делать если есть необходимость управлять нагрузкой например 10A да еще и напряжением 220В? Эту проблему можно решить если между микроконтроллером и шаговым двигателем интегрировать силовую электрическую схему, тогда можно будет управлять хоть трехфазным электромотором который открывает многотонный люк в ракетную шахту :-). В нашем случае люк в ракетную шахту открывать не нужно, нам нужно всего лишь заставить работать шаговый мотор и в этом нам поможет драйвер шагового двигателя. Можно конечно купить готовые решения, на рынке их очень много, но я буду делать свой собственный драйвер. Для этого мне понадобятся силовые ключевые полевые транзисторы Mosfet, как я уже говорил эти транзисторы идеально подходят для сопряжения Arduino с любыми нагрузками.
На рисунке ниже представлена электрическая принципиальная схема контроллера шагового двигателя.
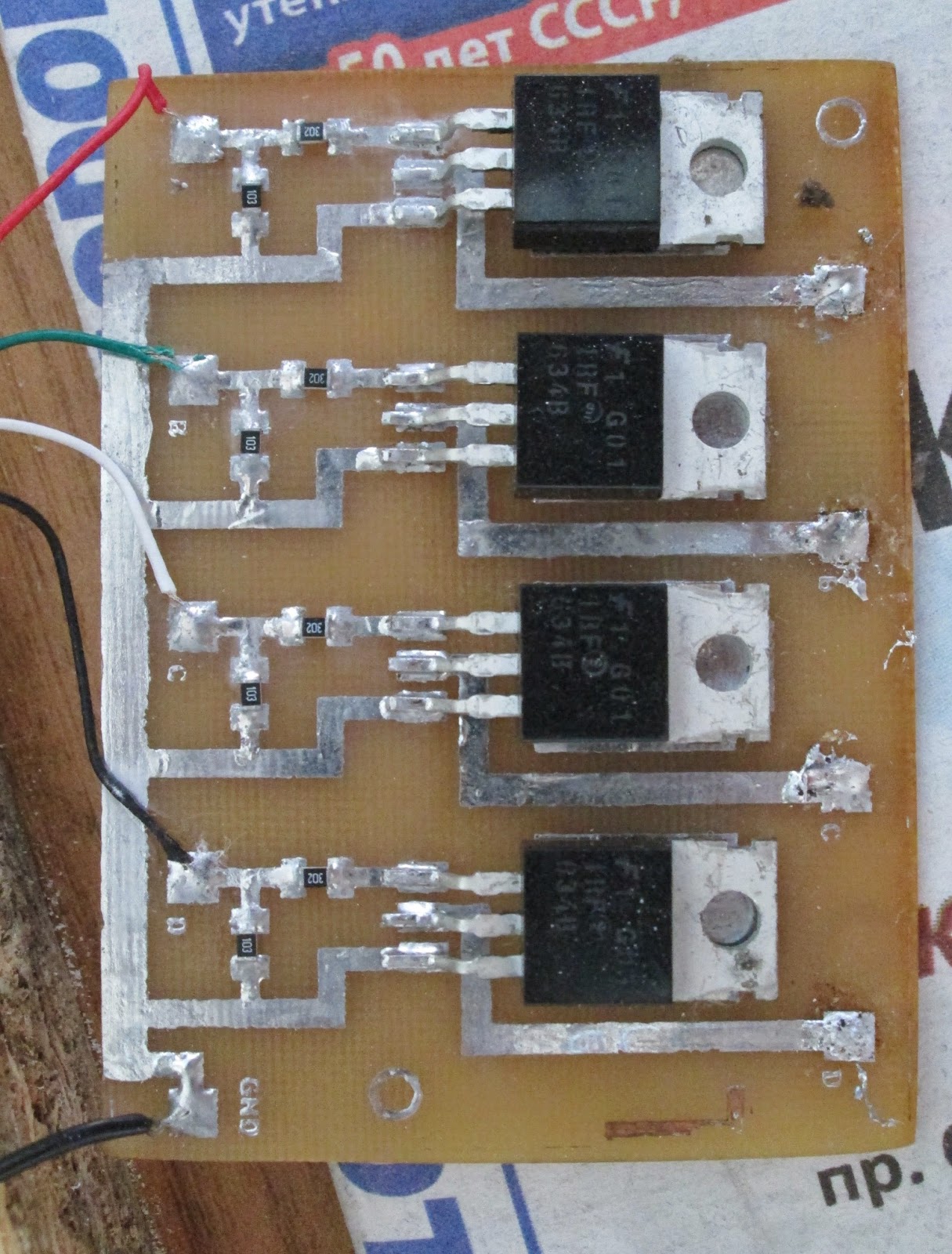
В качестве силовых ключей я применил транзисторы IRF634B максимальное напряжение исток-сток 250В, ток стока 8,1А, этого более чем достаточно для моего случая. Со схемой более менее разобрались будем рисовать печатную плату. Рисовал в встроенном в Windows редакторе Paint, скажу это не самая лучшая затея, в следующий раз буду использовать какой-нибудь специализированный и простой редактор печатных плат. Ниже представлен рисунок готовой печатной платы.
Далее это изображение в зеркальном отражении распечатываем на бумаге при помощи лазерного принтера. Яркость печати лучше всего сделать максимальной, а бумагу нужно использовать не обычную офисную а глянцевую, подойдут обычные глянцевые журналы. Берем лист и печатаем поверх имеющегося изображения. Далее получившуюся картинку прикладываем к заранее подготовленному куску фольгированного стеклотекстолита и хорошенько проглаживаем утюгом в течении 20 минут. Утюг нужно нагреть до максимальной температуры.
Как подготовить текстолит? Во первых его нужно отрезать по размеру изображения печатной платы (при помощи ножниц по металлу или ножовкой по металлу), во вторых зашкурить края мелкой наждачной бумагой, чтобы не осталось заусенцев. Также необходимо пройтись наждачкой по поверхности фольги, снять окислы, фольга приобретет ровный красноватый оттенок. Далее поверхность обработанную наждачной бумагой нужно протереть ваткой смоченной в растворитель (используйте 646 растворитель он меньше воняет).
После прогрева утюгом, тонер с бумаги запекается на поверхность фольгированного стеклотекстолита в виде изображения контактных дорожек. После этой операции плату с бумагой необходимо остудить до комнатной температуры и положить в ванночку с водой примерно на 30 минут. За это время бумага раскиснет и ее нужно аккуратно скатать подушечками пальцев с поверхности текстолита. На поверхности останутся ровные черные следы в виде контактных дорожек. Если у вас не получилось перенести изображение с бумаги и у вас есть огрехи, тогда следует смыть тонер с поверхности текстолита растворителем и повторить все заново. У меня все получилось с первого раза.
После получения качественного изображения дорожек, необходимо вытравить лишнюю медь, для этого нам понадобится травильный раствор который мы приготовим сами. Раньше для травления печатных плат я использовал медный купорос и обычную поваренную соль в соотношении на 0,5 литра горячей воды по 2 столовые ложки с горкой медного купороса и поваренной соли. Все это тщательно размешивалось в воде и раствор готов. Но в этот раз попробовал иной рецепт, очень дешевый и доступный.
Рекомендуемый способ приготовления травильного раствора:
В 100 мл аптечной 3% перекиси водорода растворяется 30 г лимонной кислоты и 2 чайные ложки поваренной соли. Этого раствора должно хватить для травления площади 100 см2. Соль при подготовке раствора можно не жалеть. Так как она играет роль катализатора и в процессе травления практически не расходуется.
После приготовления раствора, печатную плату необходимо опустить в емкость с раствором и наблюдать за процессом травления, тут главное не передержать. Раствор съест непокрытую тонером поверхность меди, как только это произойдет плату необходимо достать и промыть холодной водой, далее ее нужно просушить и снять с поверхности дорожек тонер при помощи ватки и растворителя. Если в вашей плате предусмотрены отверстия для крепления радиодеталей или крепежа, самое время просверлить их. Я опустил эту операцию по причине того что это всего лишь макетный драйвер шагового двигателя, предназначенный для освоения новых для меня технологий.
Приступаем к лужению дорожек. Это необходимо сделать чтобы облегчить себе работу при пайке. Раньше я лудил при помощи припоя и канифоли, но скажу это «грязный» способ. От канифоли много дыма и шлака на плате который нужно будет смывать растворителем. Я применил другой способ, лужение глицерином. Глицерин продается в аптеках и стоит копейки. Поверхность платы необходимо протереть ваткой смоченной в глицерине и наносить припой паяльником точными мазками. Поверхность дорожек покрывается тонким слоем припоя и остается чистой, лишний глицерин можно удалить ваткой или промыть плату в воде с мылом. К сожалению у меня нет фотографии полученного результата, после лужения, но получившееся качество впечатляет.
Далее необходимо припаять все радиодетали на плату, для пайки SMD компонентов я использовал пинцет. В качестве флюса использовал глицерин. Получилось очень даже аккуратно.
Результат налицо. Конечно после изготовления плата выглядела лучше, на фото она уже после многочисленных экспериментов (для этого она и создавалась).
Листинг программы:
/*
* Тестовая программа для шаговика
*/
#include
#define STEPS 200
Stepper stepper(STEPS, 31, 33, 35, 37);
void setup()
<
stepper.setSpeed(50);
>
void loop()
<
stepper.step(200);
delay(1000);
>
Данная управляющая программа заставляет делать один полный оборот вала шагового двигателя, после перерыва длительностью в одну секунду, повторяется до бесконечности. Можно поэкспериментировать со скоростью вращения, направлением вращения а также углами поворотов.
Драйвер шагового двигателя (версия 2)
Источник
Как сделать драйвер для светодиода
Для применения светодиодов в качестве источников освещения обычно требуется специализированный драйвер. Но бывает так, что нужного драйвера под рукой нет, а требуется организовать подсветку, например, в автомобиле, или протестировать светодиод на яркость свечения. В этом случае можно сделать драйвер для светодиодов своими руками.
Как сделать драйвер для светодиодов
В приведенных ниже схемах используются самые распространенные элементы, которые можно приобрести в любом радиомагазине. При сборке не требуется специальное оборудование, — все необходимые инструменты находятся в широком доступе. Несмотря на это, при аккуратном подходе устройства работают достаточно долго и не сильно уступают коммерческим образцам.

Необходимые материалы и инструменты
Для того, чтобы собрать самодельный драйвер, потребуются:
- Паяльник мощностью 25-40 Вт. Можно использовать и большей мощности, но при этом возрастает опасность перегрева элементов и выхода их из строя. Лучше всего использовать паяльник с керамическим нагревателем и необгораемым жалом, т.к. обычное медное жало довольно быстро окисляется, и его приходится чистить.
- Флюс для пайки (канифоль, глицерин, ФКЭТ, и т.д.). Желательно использовать именно нейтральный флюс, — в отличие от активных флюсов (ортофосфорная и соляная кислоты, хлористый цинк и др.), он со временем не окисляет контакты и менее токсичен. Вне зависимости от используемого флюса после сборки устройства его лучше отмыть с помощью спирта. Для активных флюсов эта процедура является обязательной, для нейтральных — в меньшей степени.
- Припой. Наиболее распространенным является легкоплавкий оловянно-свинцовый припой ПОС-61. Бессвинцовые припои менее вредны при вдыхании паров во время пайки, но обладают более высокой температурой плавления при меньшей текучести и склонностью к деградации шва со временем.
- Небольшие плоскогубцы для сгибания выводов.
- Кусачки или бокорезы для обкусывания длинных концов выводов и проводов.
- Монтажные провода в изоляции. Лучше всего подойдут многожильные медные провода сечением от 0.35 до 1 мм2.
- Мультиметр для контроля напряжения в узловых точках.
- Изолента или термоусадочная трубка.
- Небольшая макетная плата из стеклотекстолита. Достаточно будет платы размерами 60х40 мм.
 Макетная плата из текстолита для быстрого монтажа
Макетная плата из текстолита для быстрого монтажа
Схема простого драйвера для светодиода 1 Вт
Одна из самых простых схем для питания мощного светодиода представлена на рисунке ниже:

Как видно, помимо светодиода в нее входят всего 4 элемента: 2 транзистора и 2 резистора.
В роли регулятора тока, проходящего через led, здесь выступает мощный полевой n-канальный транзистор VT2. Резистор R2 определяет максимальный ток, проходящий через светодиод, а также работает в качестве датчика тока для транзистора VT1 в цепи обратной связи.
Чем больший ток проходит через VT2, тем большее напряжение падает на R2, соответственно VT1 открывается и понижает напряжение на затворе VT2, тем самым уменьшая ток светодиода. Таким образом достигается стабилизация выходного тока.
Питание схемы осуществляется от источника постоянного напряжения 9 — 12 В, ток не менее 500 мА. Входное напряжение должно быть минимум на 1-2 В больше падения напряжения на светодиоде.
Резистор R2 должен рассеивать мощность 1-2 Вт, в зависимости от требуемого тока и питающего напряжения. Транзистор VT2 – n-канальный, рассчитанный на ток не менее 500 мА: IRF530, IRFZ48, IRFZ44N. VT1 – любой маломощный биполярный npn: 2N3904, 2N5088, 2N2222, BC547 и т.д. R1 – мощностью 0.125 — 0.25 Вт сопротивлением 100 кОм.
Ввиду малого количества элементов, сборку можно производить навесным монтажом:

Еще одна простая схема драйвера на основе линейного управляемого стабилизатора напряжения LM317:

Здесь входное напряжение может быть до 35 В. Сопротивление резистора можно рассчитать по формуле:
R=1,2/I
где I – сила тока в амперах.
В этой схеме на LM317 будет рассеиваться значительная мощность при большой разнице между питающим напряжением и падением на светодиоде. Поэтому ее придется разместить на небольшом радиаторе. Резистор также должен быть рассчитан на мощность не менее 2 Вт.
Более наглядно эта схема рассмотрена в следующем видео:
Здесь показано, как подключить мощный светодиод, используя аккумуляторы напряжением около 8 В. При падении напряжения на LED около 6 В разница получается небольшая, и микросхема нагревается несильно, поэтому можно обойтись и без радиатора.
Обратите внимание, что при большой разнице между напряжением питания и падением на LED необходимо ставить микросхему на теплоотвод.
Схема мощного драйвера с входом ШИМ
Ниже показана схема для питания мощных светодиодов:

Драйвер построен на сдвоенном компараторе LM393. Сама схема представляет собой buck-converter, то есть импульсный понижающий преобразователь напряжения.
Особенности драйвера
- Напряжение питания: 5 — 24 В, постоянное;
- Выходной ток: до 1 А, регулируемый;
- Выходная мощность: до 18 Вт;
- Защита от КЗ по выходу;
- Возможность управления яркостью при помощи внешнего ШИМ сигнала (интересно будет почитать, как регулировать яркость светодиодной ленты через диммер).
Принцип действия
Резистор R1 с диодом D1 образуют источник опорного напряжения около 0.7 В, которое дополнительно регулируется переменным резистором VR1. Резисторы R10 и R11 служат датчиками тока для компаратора. Как только напряжение на них превысит опорное, компаратор закроется, закрывая таким образом пару транзисторов Q1 и Q2, а те, в свою очередь, закроют транзистор Q3. Однако индуктор L1 в этот момент стремится возобновить прохождение тока, поэтому ток будет протекать до тех пор, пока напряжение на R10 и R11 не станет меньше опорного, и компаратор снова не откроет транзистор Q3.
Пара Q1 и Q2 выступает в качестве буфера между выходом компаратора и затвором Q3. Это защищает схему от ложных срабатываний из-за наводок на затворе Q3, и стабилизирует ее работу.
Вторая часть компаратора (IC1 2/2) используется для дополнительной регулировки яркости при помощи ШИМ. Для этого управляющий сигнал подается на вход PWM: при подаче логических уровней ТТЛ (+5 и 0 В) схема будет открывать и закрывать Q3. Максимальная частота сигнала на входе PWM — порядка 2 КГц. Также этот вход можно использовать для включения и отключения устройства при помощи пульта ДУ.
D3 представляет собой диод Шоттки, рассчитанный на ток до 1 А. Если не удастся найти именно диод Шоттки, можно использовать импульсный диод, например FR107, но выходная мощность тогда несколько снизится.
Максимальный ток на выходе настраивается подбором R2 и включением или исключением R11. Так можно получить следующие значения:
- 350 мА (LED мощностью 1 Вт): R2=10K, R11 отключен,
- 700 мА (3 Вт): R2=10K, R11 подключен, номинал 1 Ом,
- 1А (5Вт): R2=2,7K, R11 подключен, номинал 1 Ом.
В более узких пределах регулировка производится переменным резистором и ШИМ – сигналом.
Сборка и настройка драйвера
Монтаж компонентов драйвера производится на макетной плате. Сначала устанавливается микросхема LM393, затем самые маленькие компоненты: конденсаторы, резисторы, диоды. Потом ставятся транзисторы, и в последнюю очередь переменный резистор.
Размещать элементы на плате лучше таким образом, чтобы минимизировать расстояние между соединяемыми выводами и использовать как можно меньше проводов в качестве перемычек.
При соединении важно соблюдать полярность подключения диодов и распиновку транзисторов, которую можно найти в техническом описании на эти компоненты. Также диоды можно проверить с помощью мультиметра в режиме измерения сопротивления: в прямом направлении прибор покажет значение порядка 500-600 Ом.
Для питания схемы можно использовать внешний источник постоянного напряжения 5-24 В или аккумуляторы. У батареек 6F22 («крона») и других слишком маленькая емкость, поэтому их применение нецелесообразно при использовании мощных LED.
После сборки нужно подстроить выходной ток. Для этого на выход припаиваются светодиоды, а движок VR1 устанавливается в крайнее нижнее по схеме положение (проверяется мультиметром в режиме «прозвонки»). Далее на вход подаем питающее напряжение, и вращением ручки VR1 добиваемся требуемой яркости свечения.

Заключение
Первые две из рассмотренных схем очень просты в изготовлении, но они не обеспечивают защиты от короткого замыкания и обладают довольно низким КПД. Для долговременного использования рекомендуется третья схема на LM393, поскольку она лишена этих недостатков и обладает более широкими возможностями по регулировке выходной мощности.
Источник