Как сделать недорогой FPV микро-дрон







Для следующего шага нам следует приобрести электродвигатели в количестве 4 штук, для этого отлично подойдут движки Racerstar 8520 8.5x20mm, которые продаются в комплекте. Сами электродвигатели следует установить на раму в свои посадочные отверстия, которые следовало сделать ранее. В идеале, когда двигатели сидят плотно на своём месте, без каких либо дополнительных крепежей. Но если вы вырезали раму собственноручно, и сделать точные отверстия вам не удалось, то можно воспользоваться супер клеем или термоклеем, но делать это следует так, чтобы не нарушить развесовку.
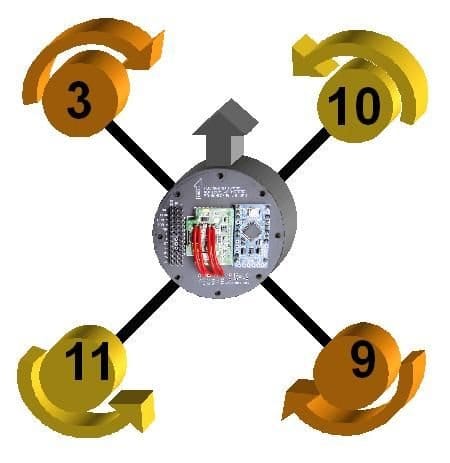
Также при установке двигателей следует не забывать что в комплекте по два типа двигателей, одни, что вращаются по часовой стрелке, а другие что против часовой. Устанавливать такие двигатели следует друг напротив друга.





























Ну и в завершении сборки, следует закрепить аккумулятор на раме квадрокоптера. Это можно сделать также на двойной скотч или оригинально закрепить его при помощи резинки, так как сделала это автор.
Ну, вот и всё! Вы собрали свой микро-дрон. После сборки сразу следует перейти в его настройки. А именно подключаем аккумулятор к полётному контроллеру, а затем аппаратуру управления, если приёмник «законэкчен» с аппаратурой то сразу после её включения они должны найти друг друга, если нет, то в инструкции к вашей аппаратуре должно быть подробно описано, как это сделать.


Присоединив аппаратуру с приёмником, переходим к настройке. А именно следует слегка поднимать дрон, аккуратно добавляя газ. И если он отклоняется, в какую либо сторону, то следует поднять обороты конкретного двигателя, в сторону которого он летит, и делать это следует до тех пор, пока в замкнутом пространстве дрон не будет максимально стабилен и хоть как то, держать точку.
Далее FPV камера. Настоятельно рекомендую, если вы серьёзно настроены на то, что вы реально будете этим заниматься, и строите этот дрон для тренировок, а затем приобретёте или построите себе серьёзный аппарат, то сразу следует приобретать хороший FPV шлем чтобы не покупать его в дальнейшем. Если для вас это больше игрушка, то можете сэкономить и приобрести такой же FPV приёмник как у автора самоделки. Чтобы начать видеть трансляцию на своём смартфоне следует, включить дрон, затем скачать и открыть специально приложение на своем смартфоне (QR- код на загрузку приложения будет в инструкции), подключить FPV приёмник и все должно работать.







Ну, на этом все! В итоге у нас получилось, что-то между игрушкой и тренажёром для профессионалов. Но в любом случае самоделка очень интересная и понравиться каждому.
Вот видео автора самоделки:
Ну и всем спасибо за внимание и удачи в будущих проектах самодельщики!
Источник
Самодельный летающий дрон с камерой, который следует за вами на автопилоте (на основе Arduino)


В наши дни дроны — это очень популярные игрушки. На рынке можно найти профессиональные летающие дроны и дроны для любителей. У мастера, автора данной статьи, есть четыре беспилотника (квадрокоптеры и гекскоптеры), потому что он любит все, что летает, но 200-й полет не так интересен и становится скучно, поэтому он решил создать свой собственный дрон с некоторыми дополнительными возможностями. Мастер любит программировать на Arduino и проектировать схемы и гаджеты, поэтому он начал его строить. В самоделке использован контроллер полета MultiWii, основанный на чипе ATMega328, который также используется в Arduino UNO, поэтому программирование довольно простое. Этот беспилотник может быть подключен к смартфону на Android, который отправляет свои данные GPS на беспилотник, который сравнивает эти данные с его собственным сигналом GPS, а затем начинает следовать за телефоном. Поэтому, если двигаться по улице, дрон будет следует за вами. Конечно, есть много недостатков, однако дрон следит за телефоном, снимает видео, а также имеет ультразвуковой датчик расстояния, чтобы избежать препятствий в воздухе. Это особенности самодельного беспилотника.
Шаг 1: Основные свойства

Дрон работает почти полностью автоматически, вам не нужно управлять им, потому что он следует за вашим телефоном, который обычно находится всегда с вами, ультразвуковой датчик помогает обходить деревья, здания и другие препятствия, а GPS выдает очень точные данные о местоположении, но давайте посмотрим, что мы имеем в итоге:
— Аккумулятор 1000 мАч, хватает на 16-18 минут непрерывного полета;
— ультразвуковой датчик, чтобы избежать препятствий в воздухе;
— Модуль Bluetooth для получения данных с телефона;
— Микроконтроллер на основе Arduino;
— встроенный гироскоп;
— регулируемая максимальная высота (5 м);
— при низком заряде батареи, дрон автоматически падает на телефон; (желательно держать телефон в руках)
— затраты на постройку дрона около 100 долларов;
— можно запрограммировать на что угодно;
— с помощью GPS можно отправить беспилотник по любым координатам;
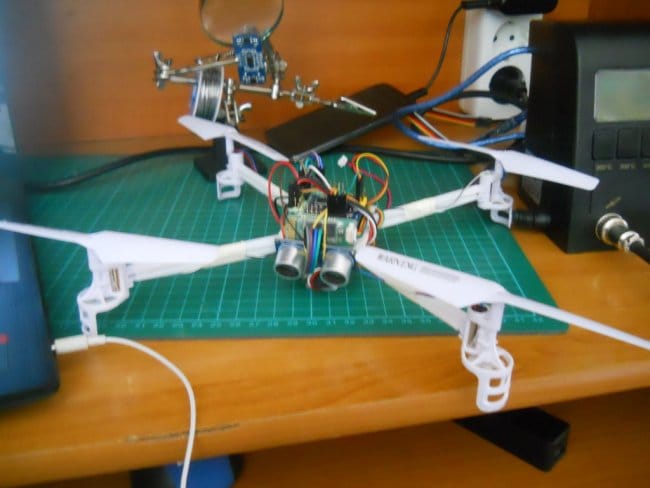
— дизайн в стиле квадрокоптера;
— оборудован 2-мегапиксельной видеокамерой 720p HQ;
— весит 109 г;




— Паяльник;
— Клей-пистолет;
— резец;
— Кусачки;
— Супер клей;
— Двухсторонняя клейкая лента;
— Резинки;
— MultiWii 32kB Flight Conroller;
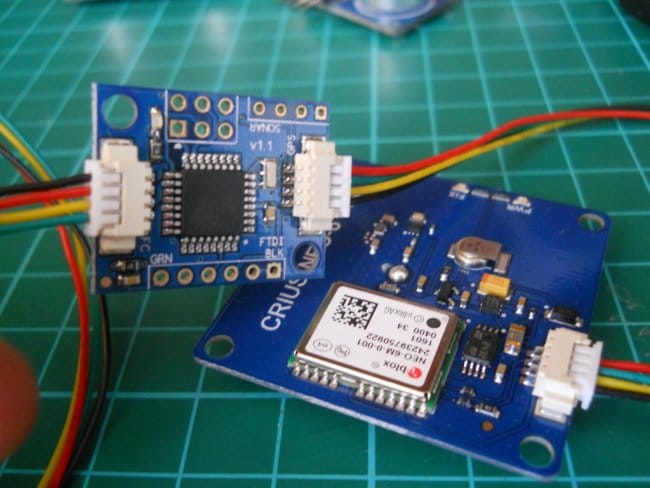
— Модуль последовательного GPS;
— Серийный I2C конвертер;
— Модуль Bluetooth;
— Ультразвуковой датчик;
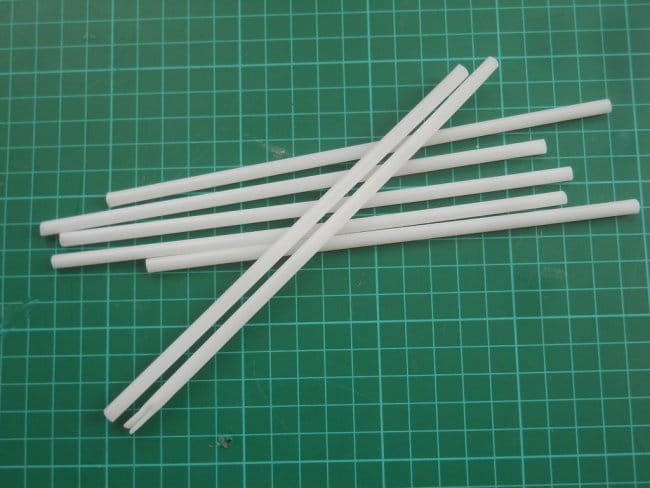
— Кусок жесткой пластмассы;
— Соломинки из кафе;
— зубчатая передача;
— Двигатели;
— Пропеллеры;
— Винты;
— L293D Motor Driver (это был неудачный выбор драйвера, будет исправлено во второй версии);
— 1000 мАч литий-ионный аккумулятор;
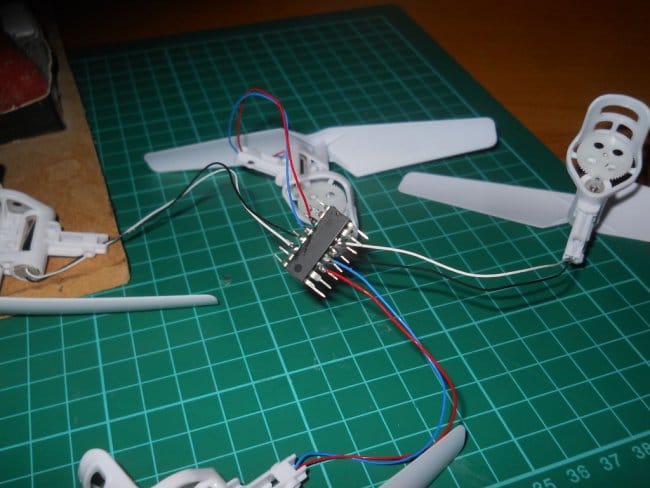
Шаг 3: Сборка пропеллеров
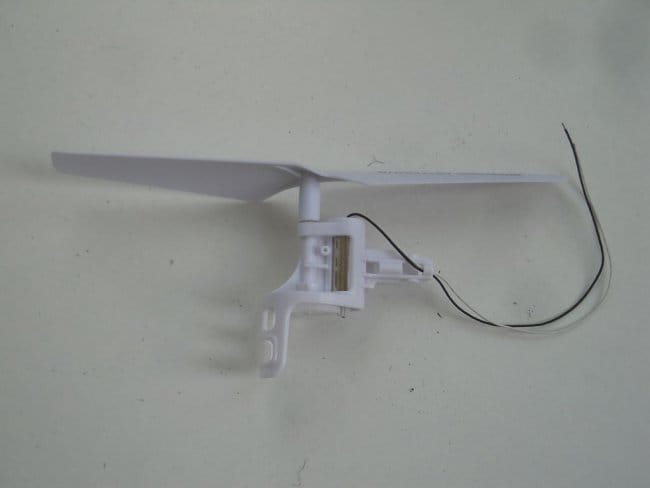


Мастер купил эти пропеллеры с моторами на Алиэкспресс, они являются запасными частями для дрона Syma S5X, но они оказались полезными и для данной самоделки.
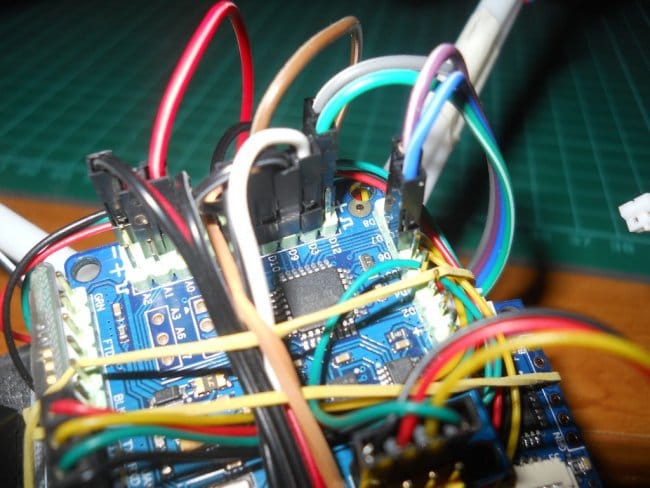
Шаг 4: Принципиальная схема
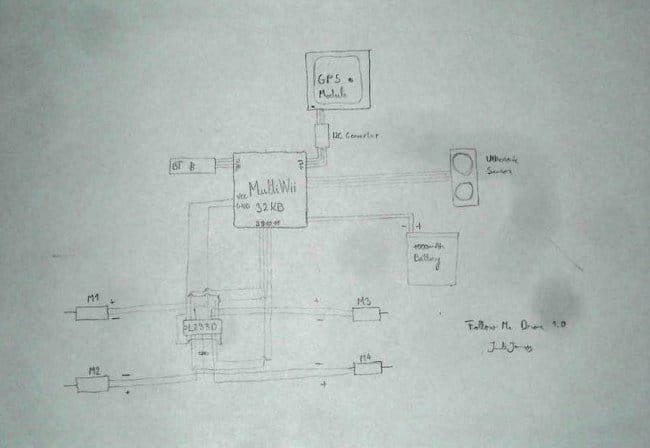
Всегда смотрите на схему во время работы и будьте осторожны со связями.
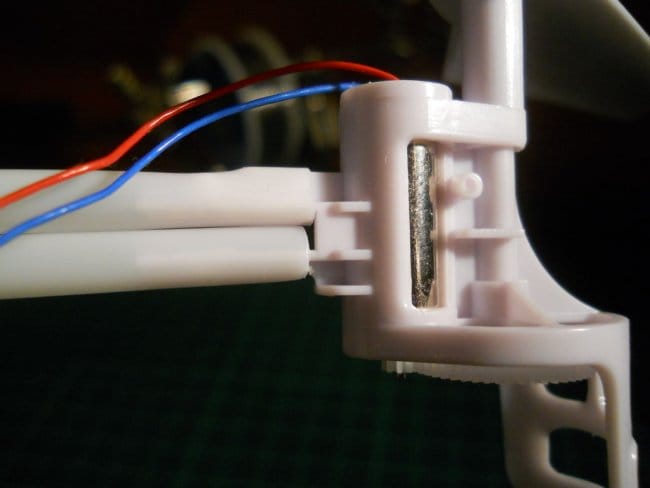
Шаг 5: Пайка двигателей к драйверу управления


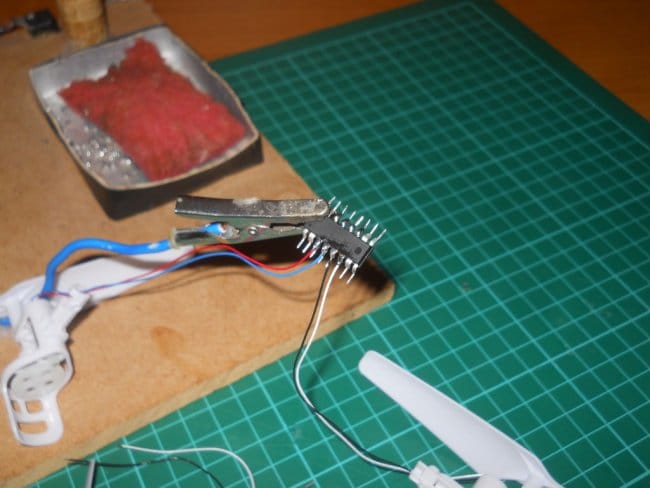

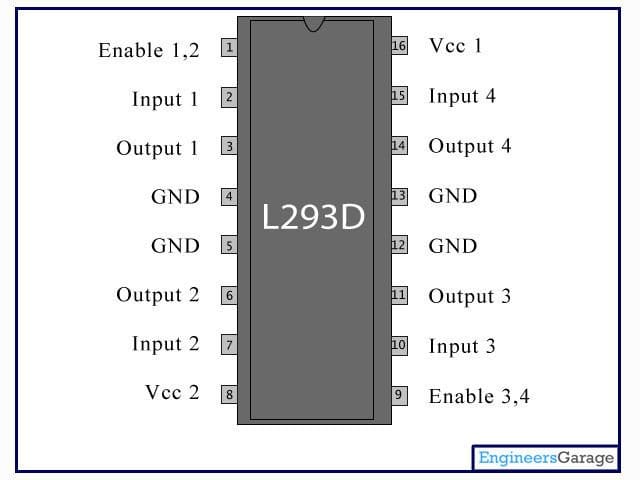
Теперь вам нужно спаять все кабели от двигателей до ИС драйвера двигателя L293D. Посмотрите на картинки, они говорят гораздо больше. Вы должны подключить черный и синий провода к заземлению и положительные провода к выходам 1-4. L293D может управлять этими двигателями, но мастер рекомендует использовать силовые транзисторы, потому что этот чип не может работать со всеми четырьмя двигателями при высокой мощности (более 2 А).


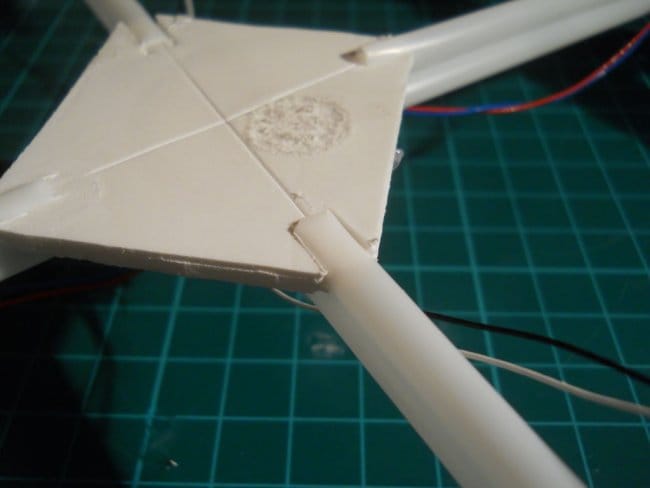
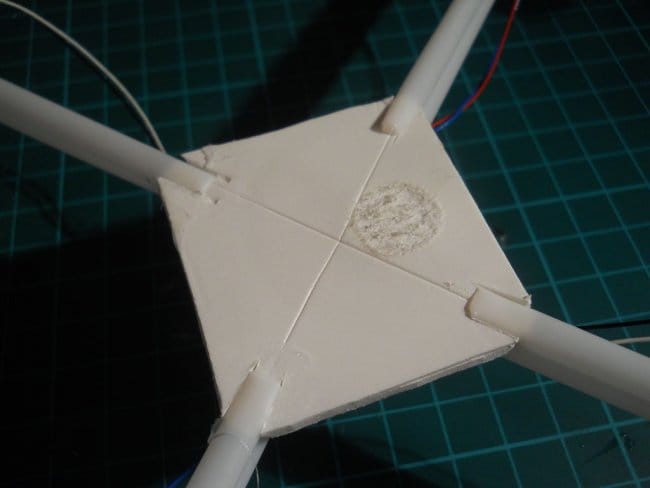
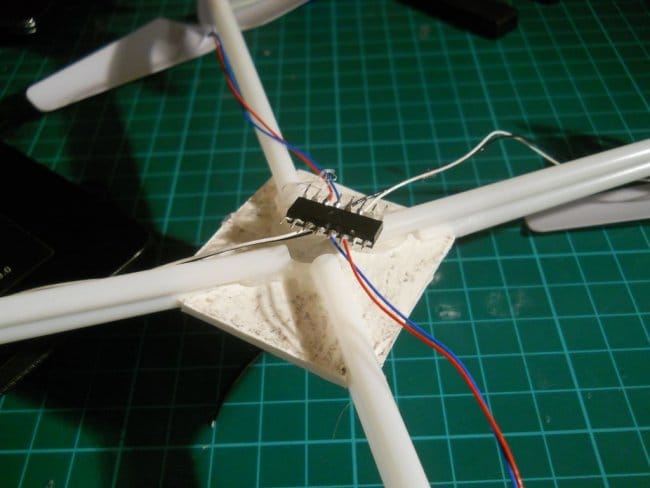
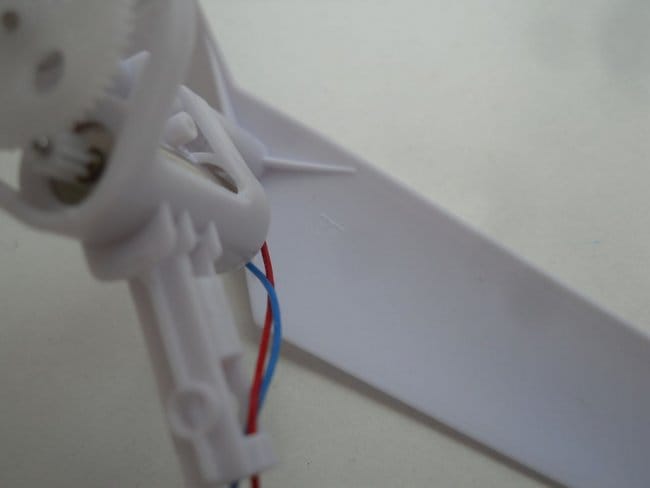
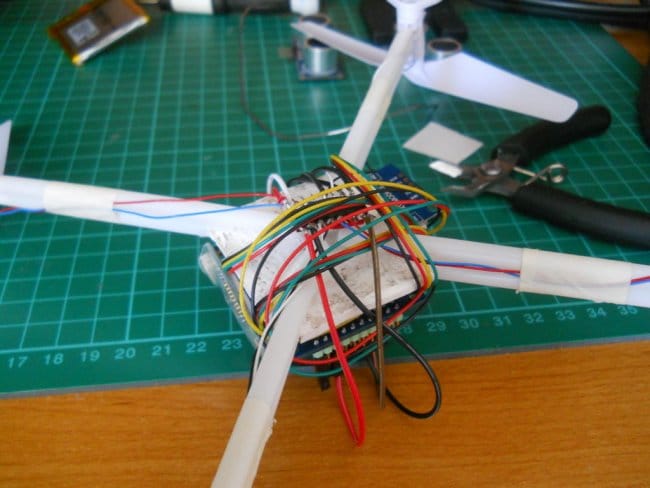
Пожалуйста, обратите внимание на вторую картинку, на которой показано, как оборудовать пропеллеры. Используйте крепкие трубочки-соломинки из кафе и кусок пластмассы для сборки рамы. Используйте немного горячего клея и супер клея для всех четырех винтов, затем проверьте соединения. Очень важно, чтобы пропеллеры находились на одинаковом расстоянии друг от друга.
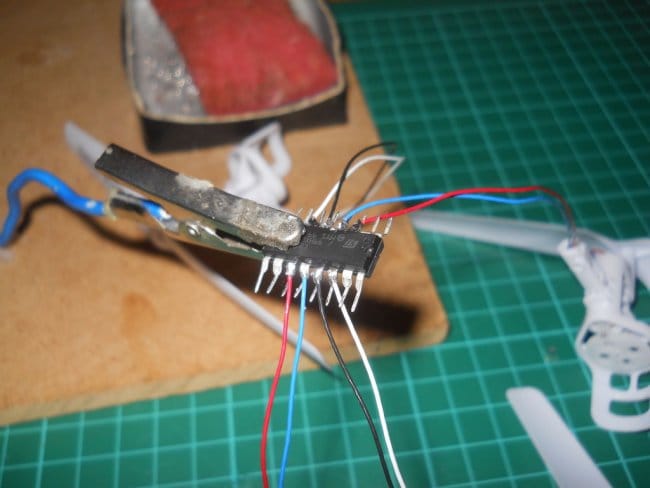
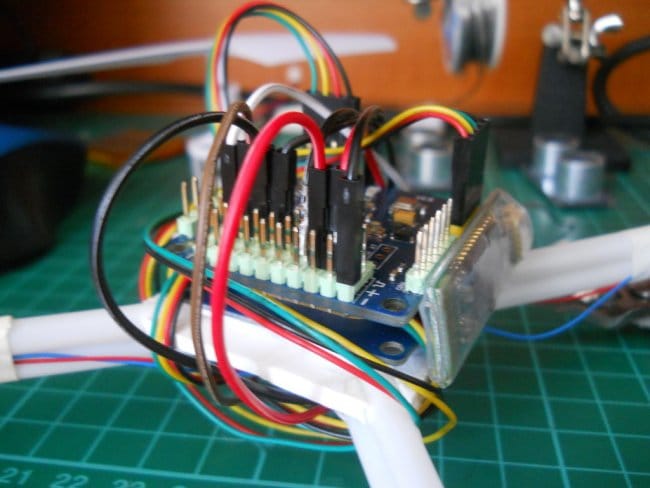
Шаг 7: Добавление проводов к драйверу L293D




Припаяйте провода к оставшимся контактам микросхемы. Это поможет подключить контакты Arduino к входам / выходам. Теперь пришло время построить схему.
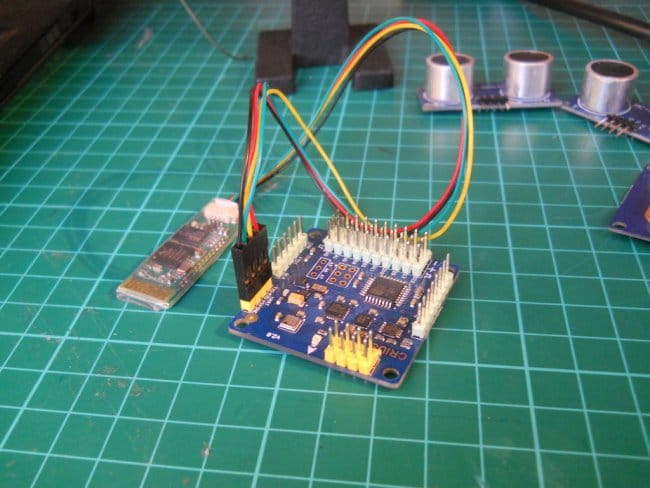
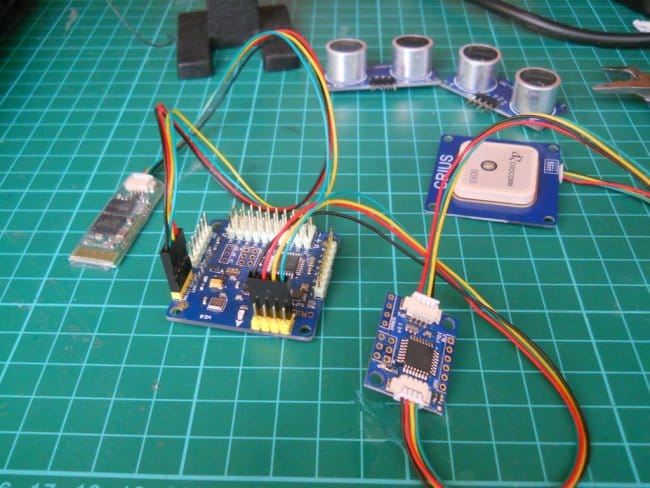
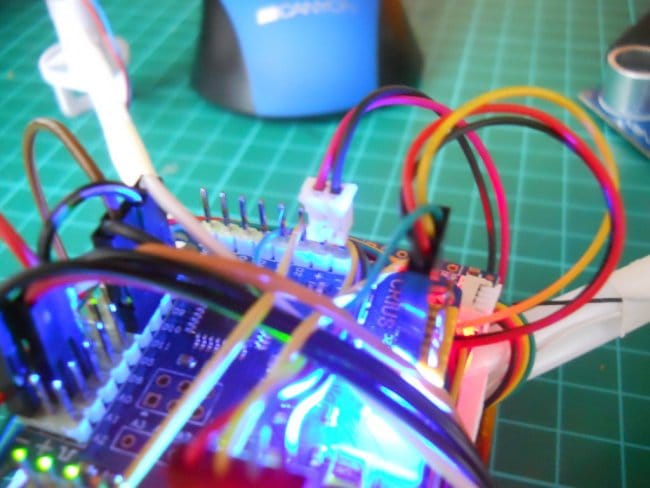
Все модули включены в комплект контроллера полета, который мастер заказывал заранее, так что просто нужно соединить их вместе. Bluetooth идет к последовательному порту, сначала GPS в преобразователе I2C, затем в порту I2C. Теперь данную схему можно установить на свой дрон.
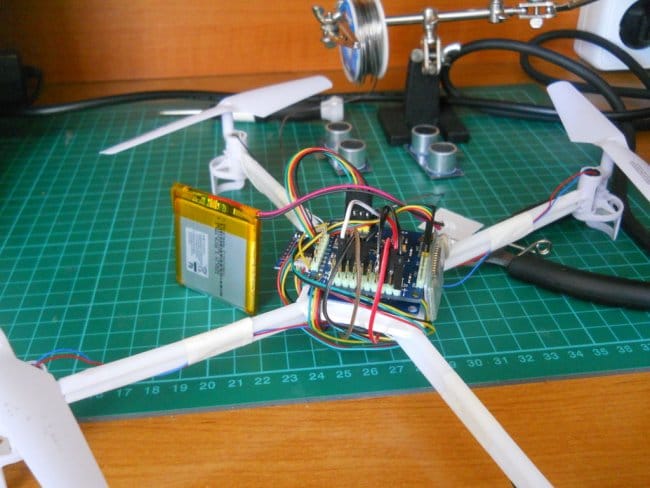
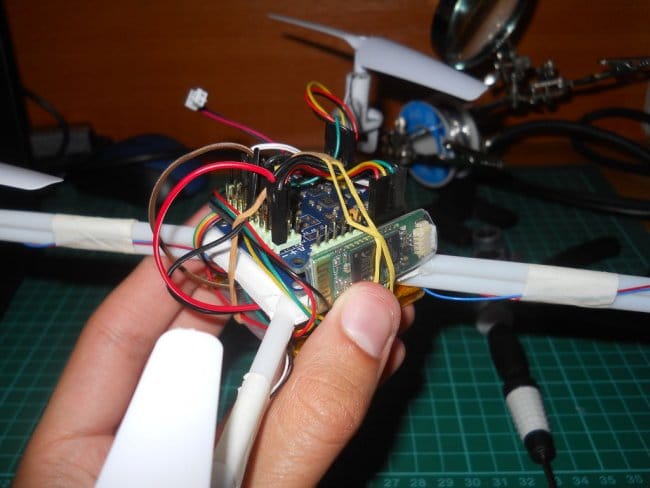
Шаг 9: Крепление электрической цепи к раме


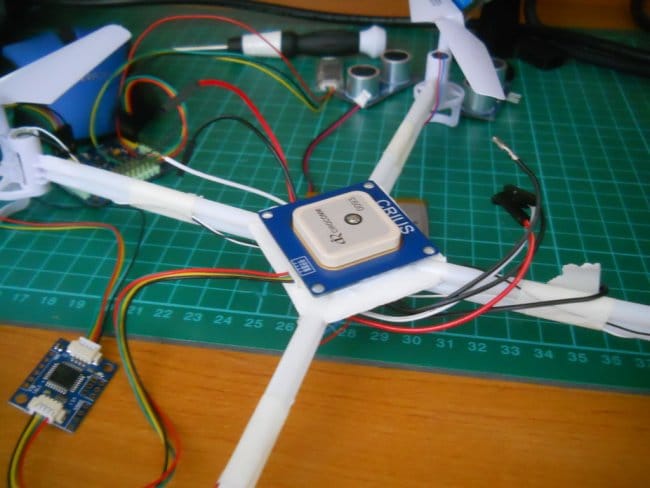
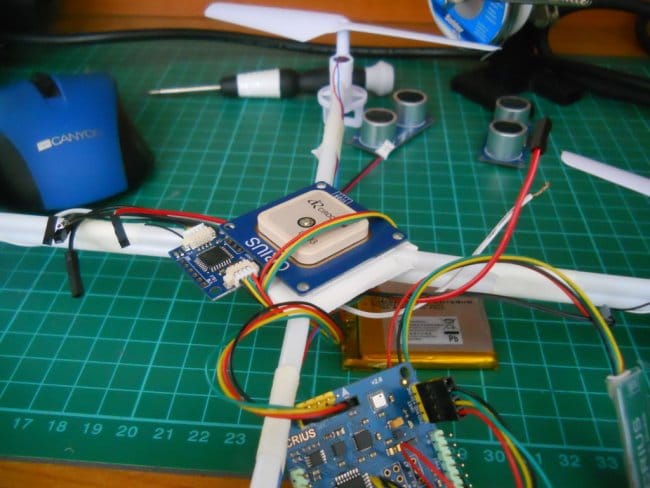

Используйте двустороннюю ленту и сначала добавьте GPS. Эта губчатая лента удерживает все на месте, поэтому приклейте каждый модуль один за другим на пластиковую деталь. По окончанию следует подключить контакты привода двигателей к MultiWii.
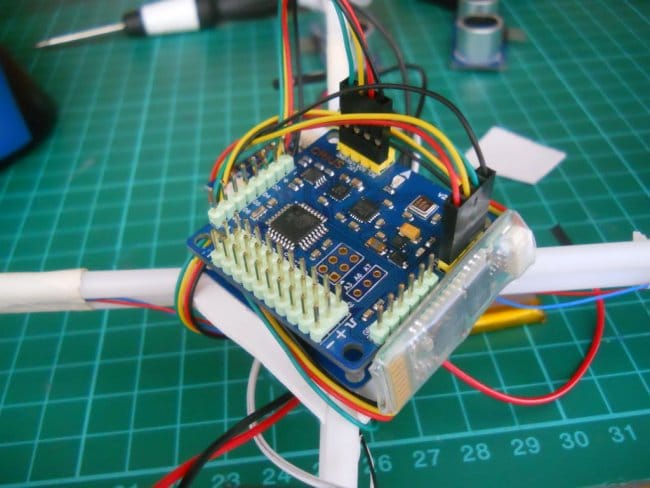
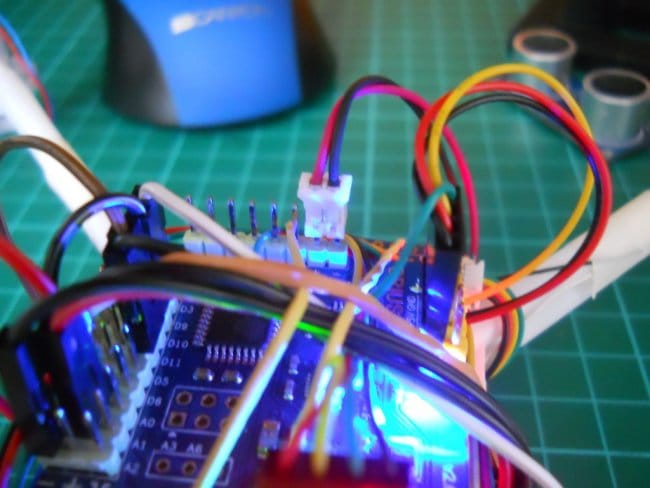
Шаг 10: Соединение двух цепей


Входные контакты поступают на D3, D9, D10, D11, остальные должны быть подключены к контактам VCC + и GND.



Мастер использовал несколько резиновых лент, чтобы прикрепить батарею к дрону. Держится довольно крепко.
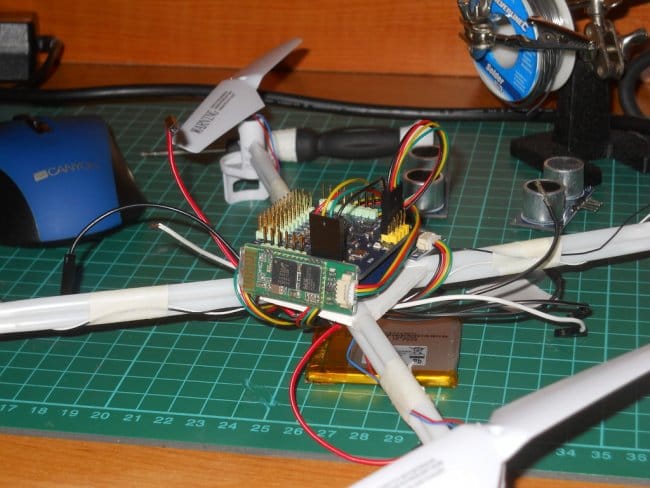
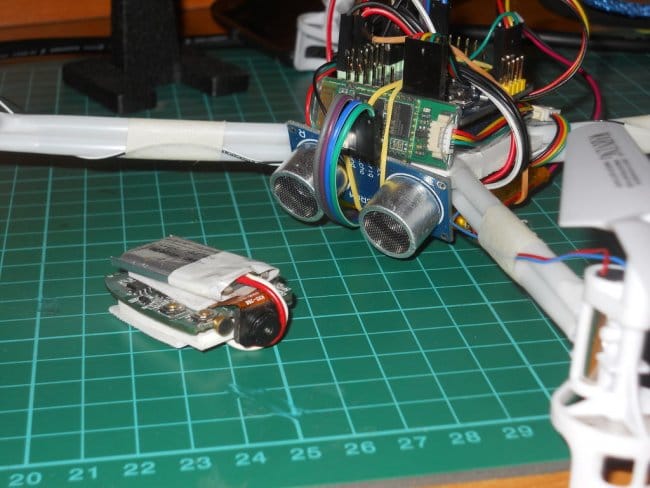
Шаг 12: Ультразвуковой датчик

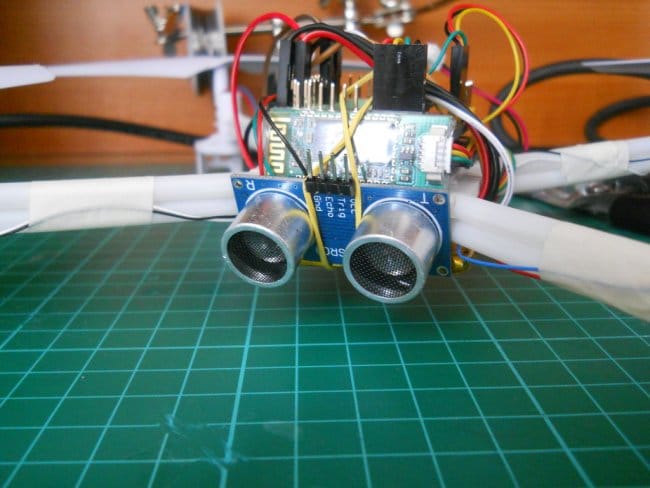
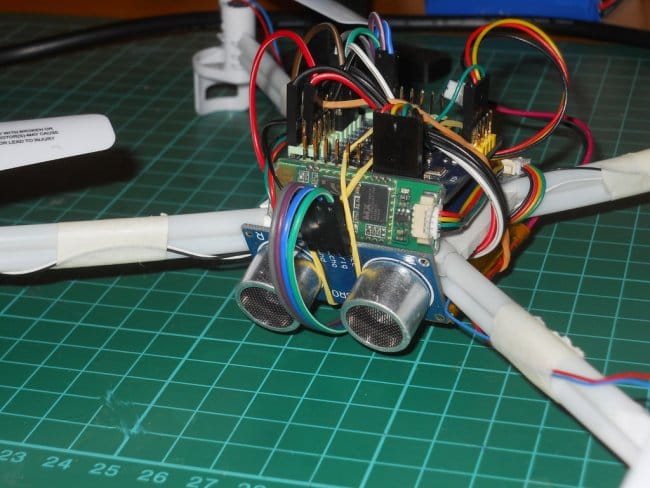
Датчик гидролокатора закреплен на дроне резиновой лентой и подключен к контактам D7 и D6 контроллера MultiWii.
Шаг 13: Программирование чипа
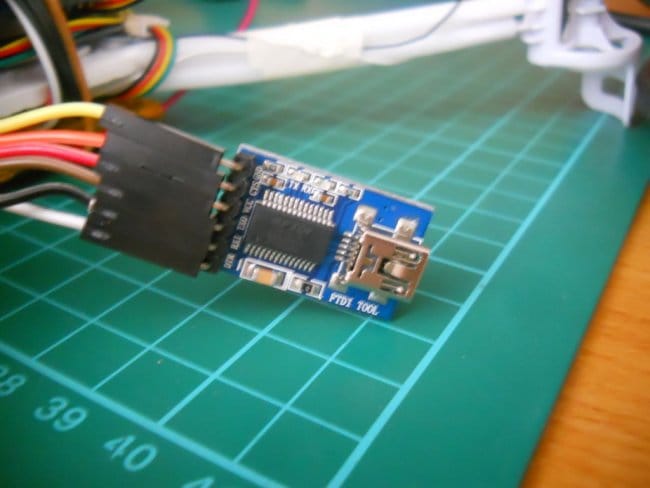
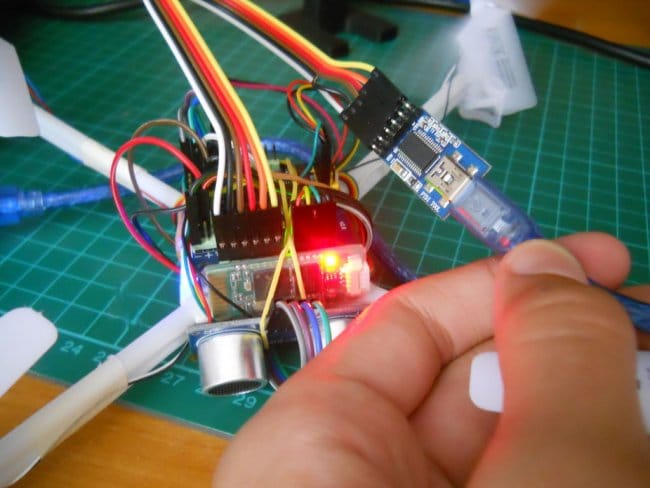
Вы должны использовать модуль Serial FTDI для программирования чипа. В комплект чипа входит модуль программатора.
Шаг 14: Программное обеспечение
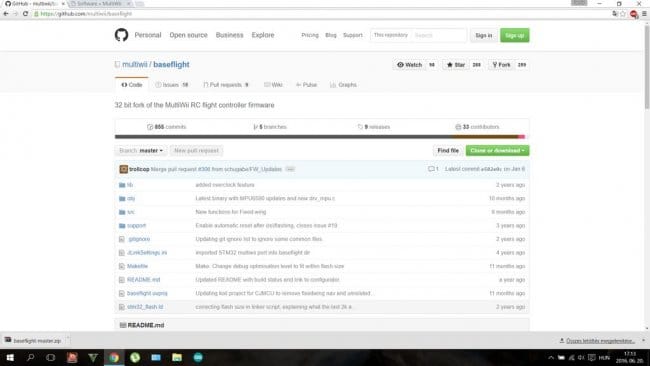
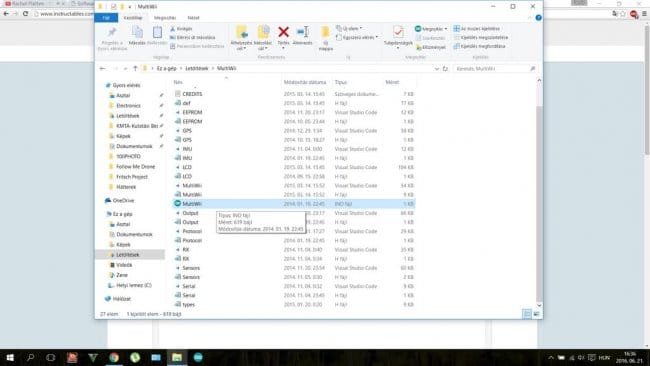

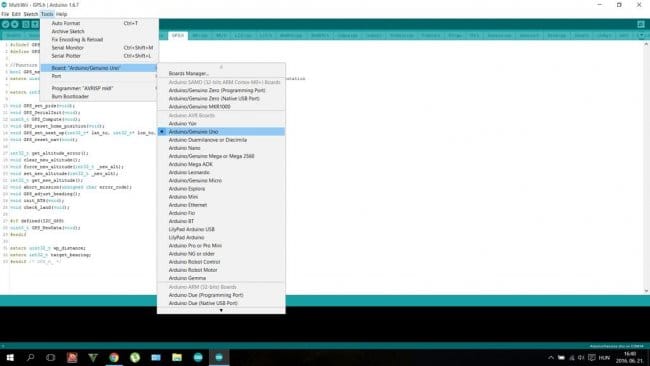
Мастер не знает, загружено ли программное обеспечение на чип или нет, но здесь он объясняет, что делать. Сначала загрузите официальную библиотеку MultiWii на свой компьютер. Извлеките файл .zip, затем откройте файл MultiWii.ino. Выберите «Arduino / Genuino UNO» и загрузите его на свой чип. Теперь ваш микроконтроллер имеет все предустановленные функции. Гироскоп, свет, Bluetooth и даже маленький ЖК-дисплей (который не используется в этом проекте) работает с загруженным кодом. Но этот код можно использовать только для проверки работоспособности модулей. Попробуйте наклонить дрон, и вы увидите, что моторы будут вращаться из-за гиросенсора. Нам следует изменить код контроллера, чтобы дрон следовал за телефоном.
Если вы можете запрограммировать Arduino или следовать инструкциям мастера, то сможете создать свой собственный дрон, который будет следовать за вами повсюду.
GitHub — ссылка на программное обеспечение
Шаг 15: Изменение кода
Мастеру пришлось изменить код датчиков и контроллера, который давал подсказки для ATMega328, но теперь модуль Bluetooth выдает три GPS-координаты, и в зависимости от них движется дрон.
Шаг 16: Приложение для телефона
Мастер использовал приложение SensoDuino, которое можно загрузить из плей маркет гугла. Подключитесь к дрону через Bluetooth и включите GPS TX и регистрацию данных. После этого приложение телефона готово.
В качестве камеры использована дешевая китайская камера. Эта камера использовалась во многих проектах мастера и всегда показывала отличные результаты. Весит она всего 15 г и может снимать хорошее видео.
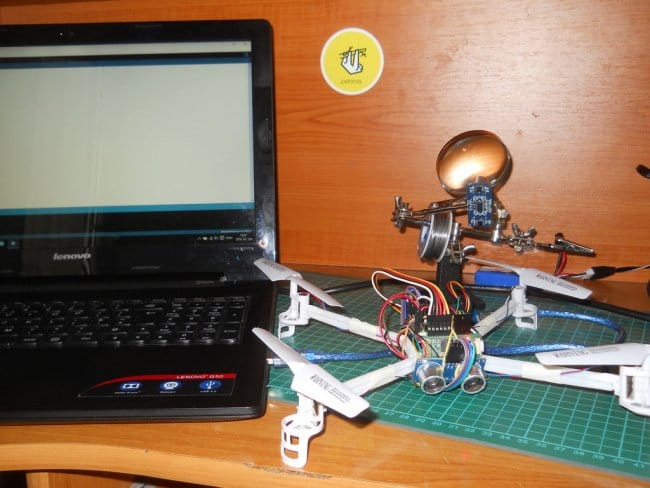
Шаг 18: Тестирование .



Расстояние соединения составило около 8 м, что более чем достаточно для такого беспилотника, как этот.
Источник