Первый Робот паук своими руками
| 10.03.2012, 15:10 Источник: timerobots.ru, roboclub.ru |
Первого робота сделать своими руками имея необходимые материалы не так уж и сложно. В данной статье речь пойдет о том, как сделать робота паука из подручных средств. Робот паук не будет иметь моторчиков, он будет статичен и неподвижен. Передвигать его можно только с помощью рук. Но если есть желание, то можно будет самостоятельно поразмыслить над тем, как заставить робота двигаться.
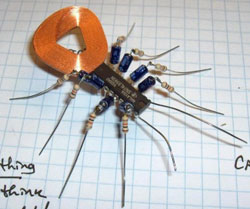
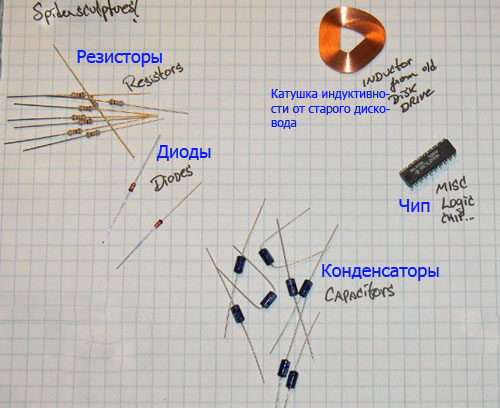
Для создания робота паука из подручных средств понадобятся резисторы и конденсаторы для ног, чип для тела, подходящая деталь для брюшка, можно использовать катушку индуктивности от старого дисковода, диоды для глаз, паяльник.
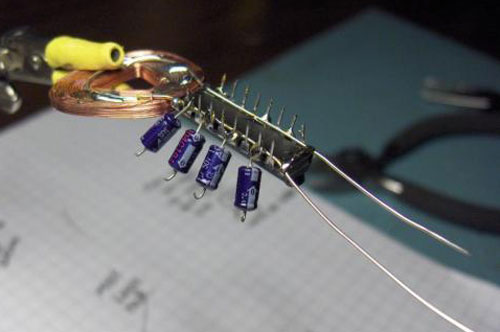
Для начала с помощью куска проволоки нужно соединить чип и деталь предназначенную для брюшка (катушка индуктивности). Проволоку нужно аккуратно припаять к части брюшка и чипу. Пусть проволока будет длинной, так чтобы концы выступали за пределы чипа, что послужит челюстями паука. В конце проволоку можно будет укоротить, чтобы она была похожа на челюсти. Далее нужно сделать лапки паука, которыми послужат резисторы. На одном конце резистора делается петелька, лишняя часть обрезается. Из резисторов нужно сделать 8 ног, но можно и больше, по желанию.

Сделанные лапки нанизываем на штыри чипа и припаиваем в нужном положении. Для наглядности смотрите фото.

Затем, нужно обрезать проводки резисторов и сделать крючки так как показано на фото. Это нужно для создания следующих сегментов ног.
Взяв другие резисторы, снова на одном из концов делается петелька и нанизывается на крючок уже припаянных резисторов. Снова припаиваем в нужном положении.
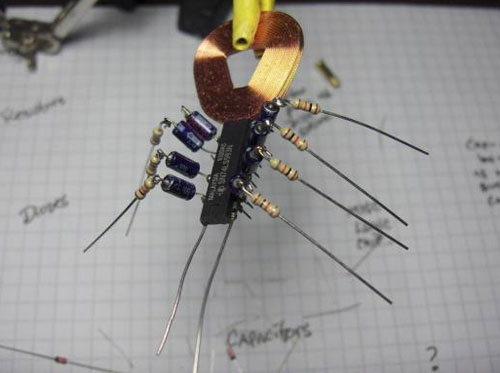
Далее нужно отрегулировать положение ног и паук готов. Роботу своими руками можно сделать глаза. В качестве глаз можно использовать диоды, которые припаиваются спереди робота, в области челюстей.
Домашний паук Spike
Представляю вам моего домашнего паучка. Зовут его Спайк. Сделан мной с нуля где-то год назад.
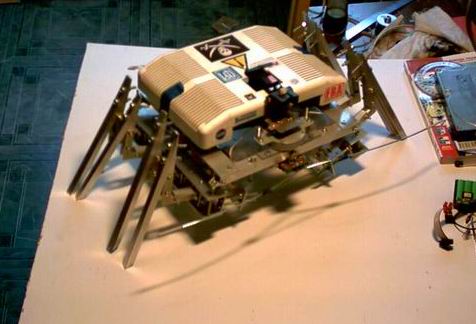
Основа конструкции — алюминиевые профили. Кроме них собственно почти ничего и не используется. Еще из механики присутствуют пара пружин от автомобильных тормозных колодок и 16 одинаковых шестеренок Их пришлось заказывать на www.conrad.de стоило это порядка 300 рублей и в пересчете получилось по 10р за шестеренку. Везли где-то месяц. Механика показана на картинке внизу. Ходовая собрана всего на 2 моторах и управляется аналогично гусеничной. Характеристики получились довольно неплохие: тяга до 4 кг, грузоподъемность до 20 кг. Скорость получилась не самая быстрая: 0.3 м/с. Но это из-за медленных двигателей. Кстати потребление у них вполне скромное: 0.5А при полном ходу с дополнительным весом в 5 кг.
Теперь об электронике: Роботом рулит контроллер ATMEGA8535. Для управления двигателями пока что используются реле. Но их скорости реакции вполне хватает. Из датчиков имеются усы и измеритель расстояния Sharp. Последний закреплен на роторе шагового двигателя и может смотреть по сторонам.
Собственно на этом пока что все и остановилось. Я сейчас работаю над другим роботом, он не такой большой и сложный с механической точки зрения, зато на нем легче испытывать новые алгоритмы. Как только придумаю ему имя — тоже расскажу о нем здесь.
Источник
Робот-паук на сервоприводах + ИК-управление
| 14.02.2018, 10:24 Источник: cxem.net |
Четырехногий робот-паук создан для демонстрации работы сервомашинок под управлением контроллера Arduino (для кружка робототехники).
У робота два режима:
- автономный — робот движется вперед, при обнаружении препятствия (используется ультразвуковой датчик) поворачивается и движется дальше;
- внешнее управление с помощью ИК-пульта.
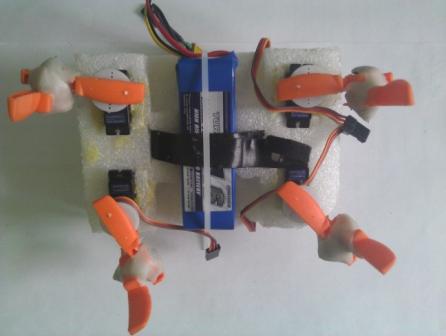
Использовались сервомашинки Turnigy TGY-9025MG металлическим редуктором.

В качестве ног робота использовались заглушки для струйных картриджей, скрепленные с помощью поликапролактона


Корпус был сделан из упаковочного материала для компов. Для сервомашинок требуется отдельное питание. В качестве источника питания используется Li-po батарея Turnigy 2S 1600 mAh.
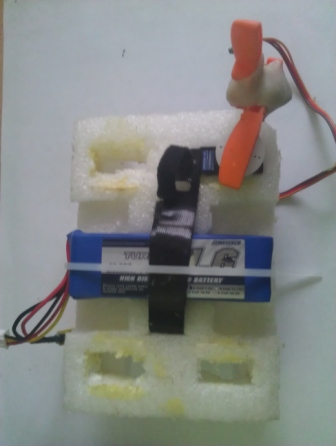
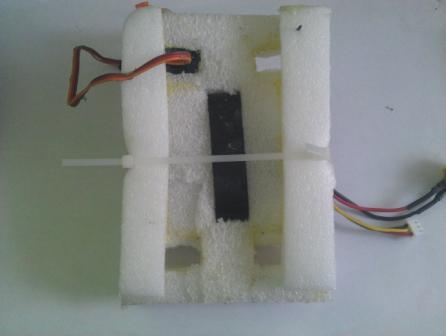
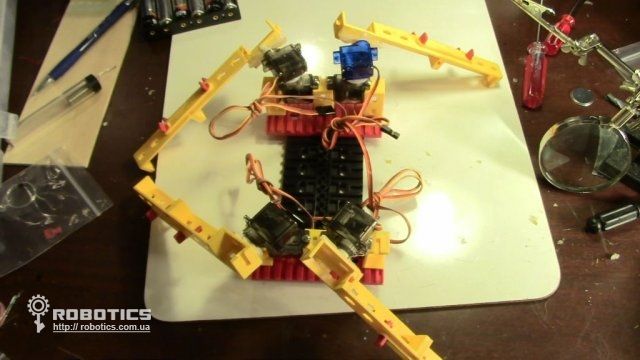
Вот вид сверху и снизу робота в процессе сборки.

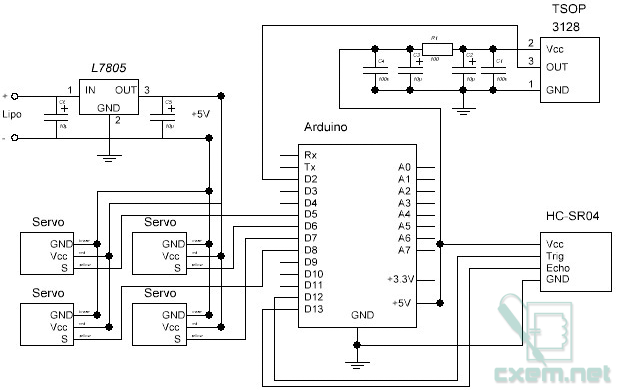
Для управления сервоприводом в Arduino имеется стандартная библиотека Servo. На платах, отличных от Mega, использование библиотеки отключает возможность использования analogWrite() (PWM) на пинах 9 и 10 (вне зависимости подключены к этим пинам сервы или нет). На платах Mega, до 12 серв могут использоваться без влияния на функциональность PWM, но использование от 12 до 23 сервомашинок отключит PWM на пинах 11 и 12. Cервопривод подключается 3-мя проводами: питание, земля и сигнальный. Питание – красный провод. Черный(или коричневый) провод – земля подключается к GND выводу Arduino, сигнальный(оранжевый/желтый/белый) провод подключается к цифровому выводу контроллера Arduino. Будем использовать выводы 5,6,7,8 Arduino.
Напряжение выдаваемое батареей 7.4 – 8.4 В. Т.к. для питания сервоприводов необходимо напряжение 4.8 – 6.0 В будем использовать стабилизатор напряжения 5В, собранный на микросхеме L7805. Одна микросхема постоянно перегревалась, проблема решилась установкой параллельно двух микросхем L7805.
Для обнаружения препятствий будем использовать ультразвуковой датчик HC-SR04, который позволяет определять расстояние до объекта в диапазоне от 2 до 500 см с точностью 0.3 см. Если расстояние до препятствия меньше 10 см, робот делает поворот и движется дальше вперед.

В качестве пульта используется пульт lg, приемник ИК-сигналов — TSOP31238(1-GND, 2 — +5V, 3-OUT).

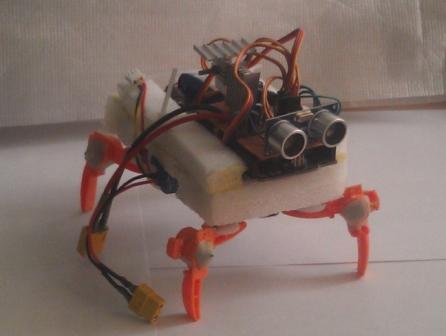
И весь робот в сборе (плата Arduino питается от батарейки Крона).

Приступим к написанию скетча
Для управления сервоприводами используется Arduino библиотека Servo. Нам необходимо реализовать совокупность движений сервоприводов для движения робота-паука вперед, назад, поворота по часовой стрелке и поворота против часовой стрелки. Кроме того необходимо реализовать функции остановки робота, а также для экономии электроэнергии предусмотрим режим засыпания (когда сервоприводы находятся в режиме detach) и пробуждения (перевод сервоприводов в режим attach). Поэтому каждое движение робота состоит из нескольких шагов.
Например движение вперед состоит из следующих шагов:
- левая передняя нога вперед;
- правая передняя нога вперед;
- левая задняя нога вперед;
- правая задняя нога вперед;
- четыре ноги вместе назад (что приведет к перетаскиванию тела робота-паука).
Данные для угла поворота каждой сервы на каждом шаге для каждого движения робота-паука хранятся в трехмерном массиве arr_pos.
Источник
Как своими руками сделать паукообразного робота на Arduino
Для тех, кто решил проверить свои силы в области роботостроения и заодно желает изучить возможности платформы Ardunio, есть отличный способ это сделать, собрав робота-паука, который будет описан в этой статье. В качестве основных силовых элементов, благодаря которым робот будет передвигаться, являются сервоприводы. Что касается мозга, то здесь в качестве него выступает Arduino, а также Fischertechnik. По словам автора, робот получился довольно интересным и перспективным.
Материалы и инструменты для изготовления:
— набор лезвий;
— термоклей;
— дремель (нужны очень тонкие сверла);
— винтоверт;
— дрель со сверлом 7/32;
— крестообразная отвертка;
— лезвие;
— отсек для батареек;
— макетная плата.
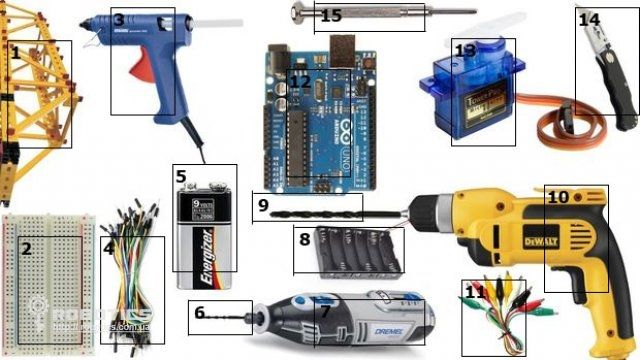
Из электроники понадобится:
— восемь микросервоприводов с кронштейнами;
— 6 батареек типа АА и прищепка;
— много перемычек и контактных разъемов.
В качестве программной части будет нужна Arduino с блоком питания.
И запчастей необходим набор Fischertechnik.
Процесс изготовления робота. :
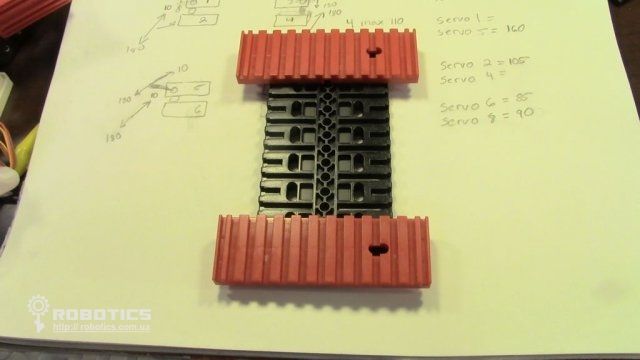
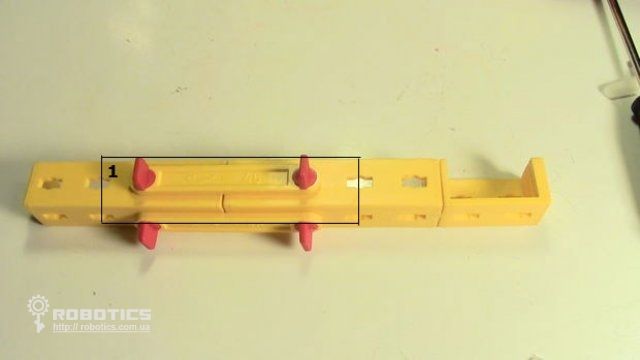
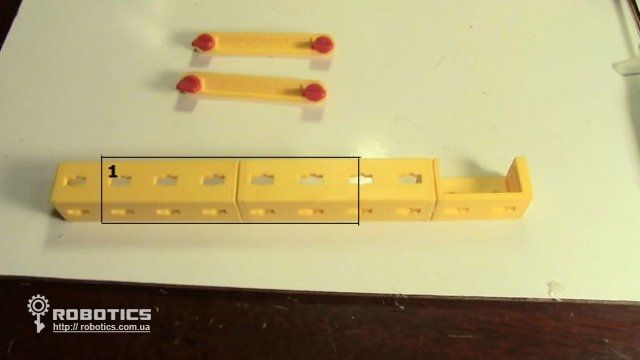
Шаг первый. Создаем каркас робота
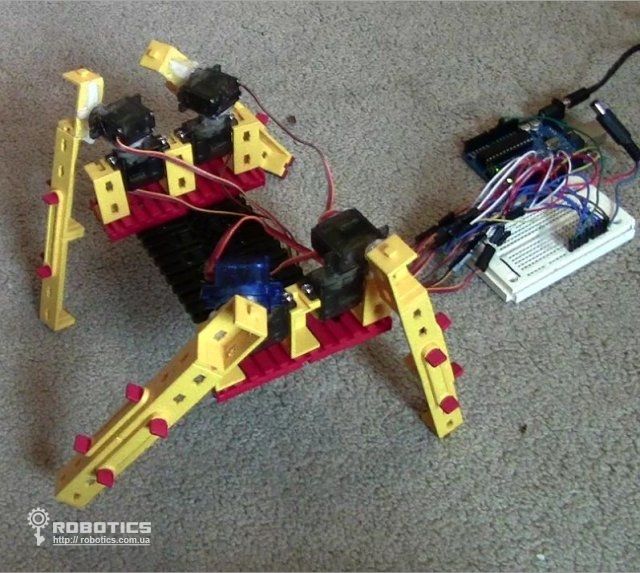
Чтобы изготовить каркас понадобится набор Fischertechnik. Как он должен выглядеть, можно увидеть на фото. Для создания каркаса нужны три высоких «кирпичика», между ними должно иметься четыре отверстия. Конкретно в этой самоделке будет использоваться элемент с 11-ю вырезами. Важно убедится в том, чтобы все сервоприводы были рабочими.
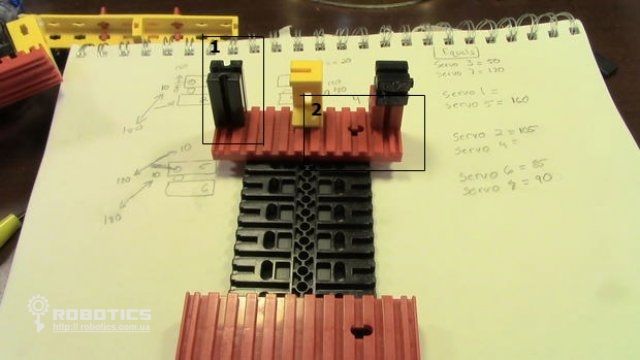
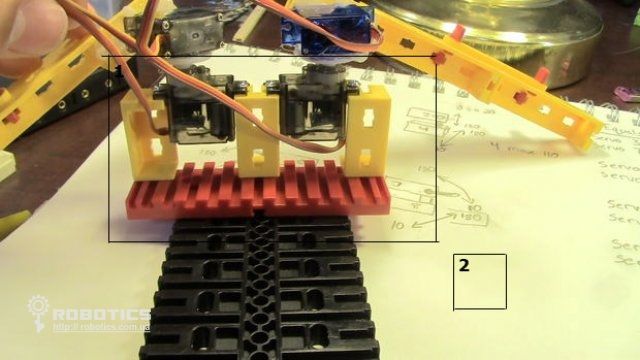
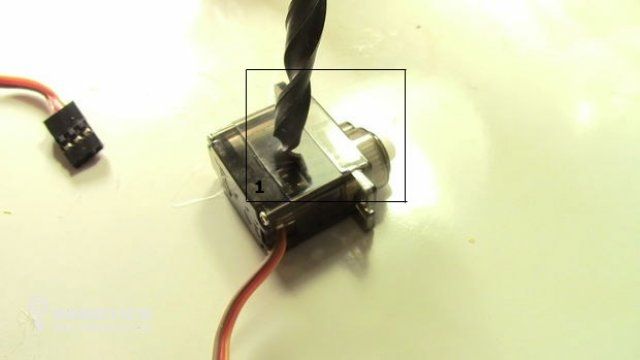
Шаг второй. Устанавливаем сервоприводы
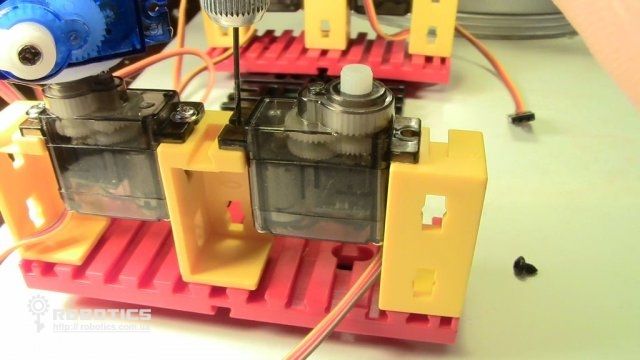
Сервоприводы будут устанавливаться между «кирпичиками». Сервоприводы фиксируются с помощью винтов, для этого предварительно в местах крепления с помощью дремеля нужно просверлить отверстия. Сверлить нужно отверстия самого малого диаметра. Впрочем, для этих целей подойдет и термоклей, но в таком случае конструкция будет неразборной.
Второй сервопривод устанавливается на другой стороне вспять.



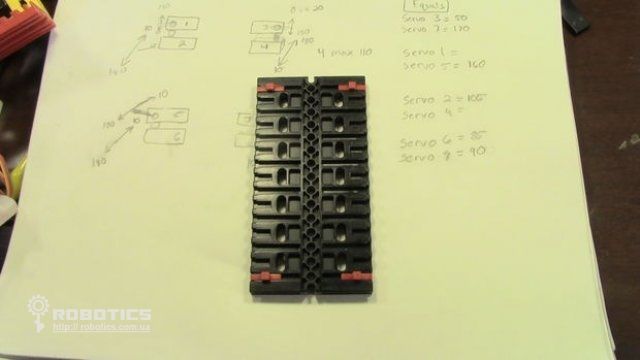
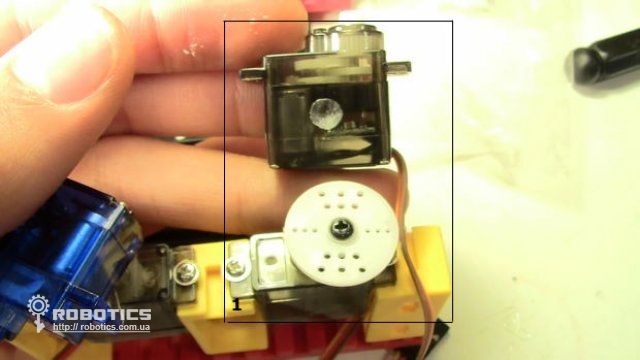
Шаг третий. Установка одного серводвигателя на другой
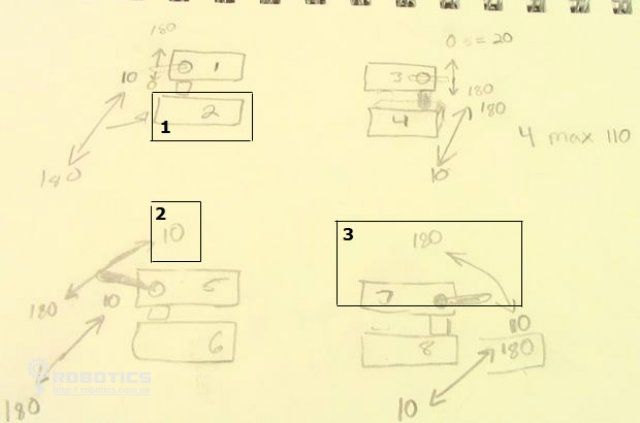
В первую очередь нужно разобраться с элементами крепления сервоприводов. Если двигатель вращается в противоположную сторону, его нужно повернуть до упора вправо. Как это сделать, можно увидеть на фотографии.
Конкретно в данном случае винт сервопривода должен выступать над пластиком, благодаря этому он будет подвижным. В корпусе второго сервопривода нужно проделать углубление под головку винта.
Что
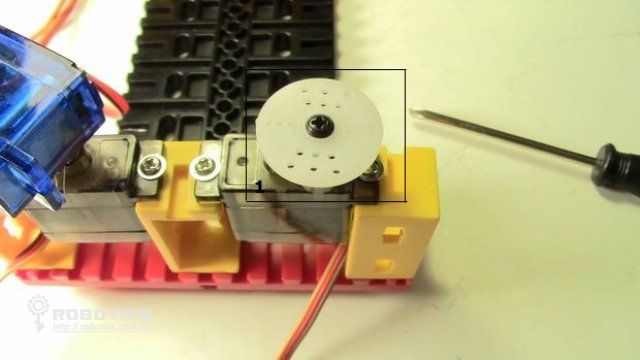

Что-бы соединить два сервопривода используется горячий клей.
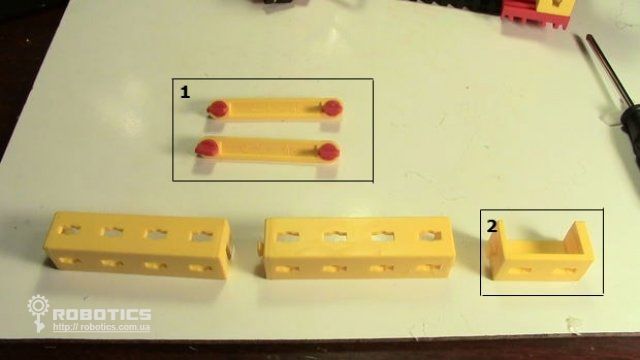
Шаг четвертый. Подсоединяем ноги
Как изготовить ноги, можно увидеть на фото. Всего их должно быть четыре.
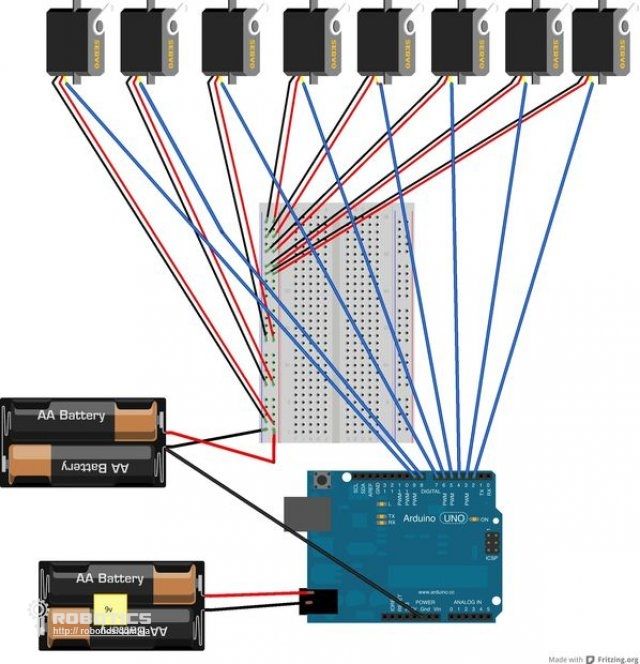
Шаг шестой. Макетная плата
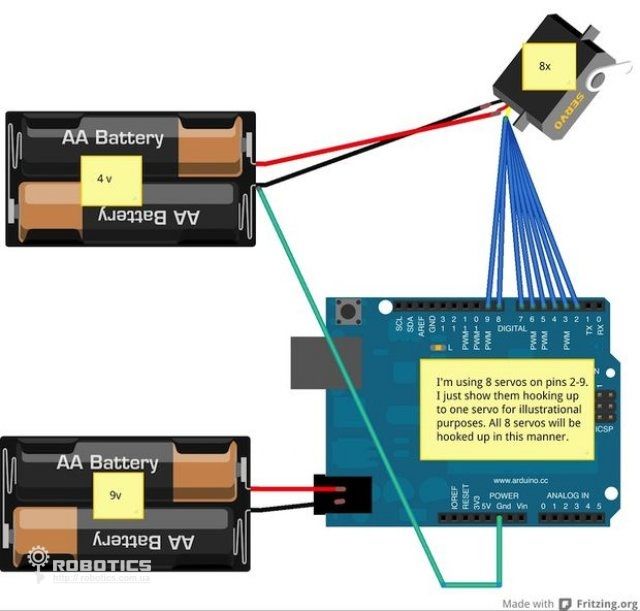
Нужно вытащить все 30 перемычек. Далее все нужно соединить проводами так, как указано на схеме. На каждом сервоприводе есть три контакта, один отвечает за заземление, через один подается питание, а еще один нужен для контроля двигателя.
Контакты сервопривода Vcc и GND нужно соединить с контактами макета Vcc и GND. Также к каналам макета GND и Vcc подключается источник питания мощностью 7.5В.
Провода для управления сервоприводом окрашены в оранжевый и желтый цвет. Они подключаются к контактам 2 и 9. К примеру, контакт от первого двигателя подключается ко второму контакту на Arduino. Второй двигатель подключается уже к третьему контакту и так далее.
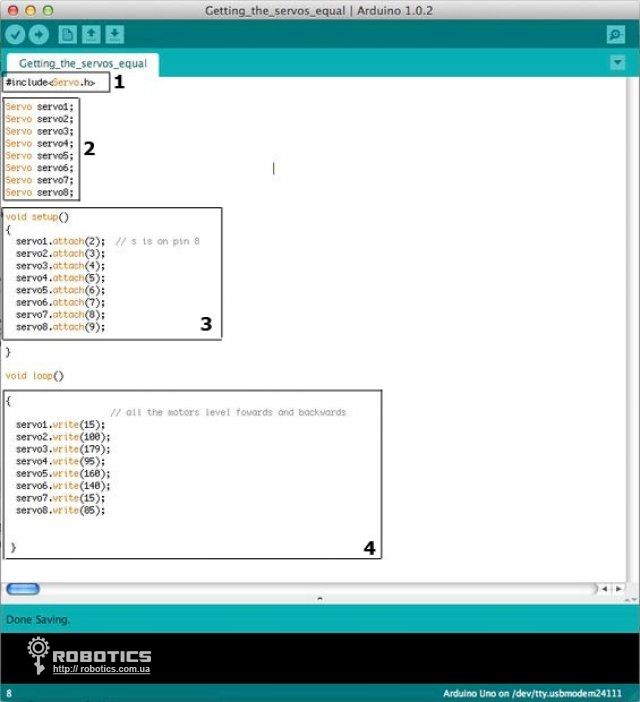
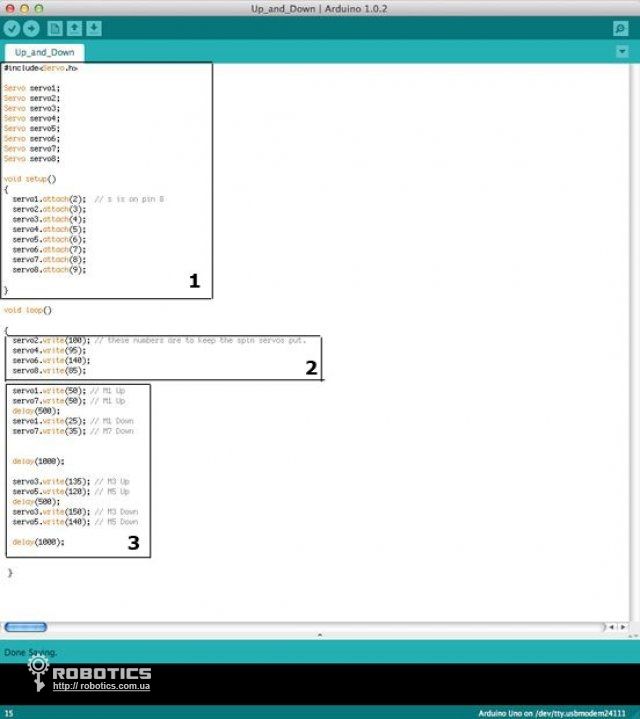
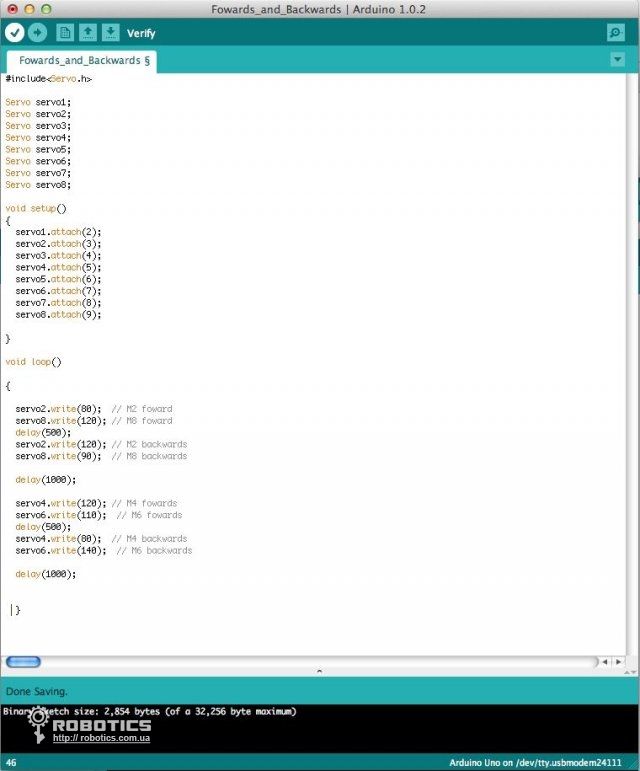
Ну и наконец, чтобы робот пошел, нужно скомбинировать переднюю и заднюю часть. Как можно отметить, программный код робота состоит из четырех блоков.
Вот и все, робот готов. Теперь на него можно устанавливать различные датчики, которые позволят роботу ориентироваться в пространстве. Также можно сделать роботу руки, чтобы он мог брать предметы. В общем, здесь уже все зависит от энтузиазма и воображения роботостроителя. Впрочем, даже в таком виде робот ведет себя довольно интересно.
Источник