- Eggbot своими руками arduino uno
- 3D печатный яйцебот всего за $15. Рецепт приготовления
- DIY Arduino Controlled Egg-Bot
- Introduction: DIY Arduino Controlled Egg-Bot
- Step 1: Parts
- Step 2: Connection
- Step 3: PCB (optional)
- Attachments
- Step 4: Frame
- Attachments
- Step 5: Cutting of the Frame
- Step 6: Smoothing the Edge
- Step 7: Drilling Holes
- Step 8: Pen Arm
- Step 9: Connection Frame
- Step 10: Code for Arduino
- Step 11: Software for Computer
- Step 12: First Painting
- 1 Person Made This Project!
- Recommendations
- Robots Contest
- Space Contest
- Micro:bit Contest
- 52 Comments
- Eggbot своими руками arduino uno
- Собираем знаменитый яйцебот ( EggBot).
- Первая засада:
- Далее заливаем прошивку GRBL:
- Засада вторая:
- Как управлять:
- Подготавливаем GCODE:
Eggbot своими руками arduino uno
Яйцебот Про Мини

Комплекты для сборки
Вы можете купить полный комплект для сборки — тут.
Прочтите, это важно!
Это хранилище разработки проекта. Некоторые файлы могут находится не в консистентном состоянии. Если вы хотите создать устройство самостоятельно, то смотрите релизы.
Cписок деталей и количество, которое нужно напечатать

1 x 0000001. Нижняя крышка корпуса
1 x 0000002. Верхняя крышка корпуса
1 x 0000003. Логотип
2 x 0000004. Держатель гайки М4
1 x 0000005. Правая ось поддержки яйца
1 x 0000006. Держатель пружины
1 x 0000007. Держатель правой оси
1 x 0000008. Фиксатор оси поддержки
2 x 0000009. Держатель болта М4 низ
2 x 0000010. Держатель болта М4 верх
1 x 0000011. Держатель левой оси
1 x 0000012.Левая ось поддержки яйца
1 x 0000013. Держатель руки маркера
1 x 0000014. Направляющая держателя руки маркера
1 x 0000015. Корпус направляющей
1 x 0000016. Рука маркера H
1 x 0000017. Рука маркера V
1 x 0000018. Правая крышка корпуса
Загрузите и распечатайте все файлы — отсюда или купите — тут.
Не печатаемые части
Болты и гайки, которые без труда можно найти в любом хозяйственном магазине
Инструкция по сборке
Посмотрите видео инструкцию по сборке — тут
Загрузите инструкцию по сборке отсюда.
3Д модель сборки тут.

В качестве прошивки используется Eggduino. Это ардуино прошивка для EggBot / Spherebot с интерацией Inkscape (Github).
- Загрузите и распакуйте Firmware.zip.
- Для Arduino UNO с контроллером CH340G (почти все китайские платы) загрузите и установите драйвер: http://www.wch.cn/download/CH341SER_ZIP.html.
- Загрузите ARDUINO IDE отсюда: https://www.arduino.cc/en/Main/Software и установите его.
- Запустите ARDUINO IDE. Выберите плату Arduino UNO и COM порт (может быть COM5 или другой) в меню «Tools->Board»…
- Откройте Eggduino.ino из Firmware.zip и загрузите в ваш Arudino Uno.
Программа для печати и управления
В качестве управляющей программы используется свободный векторный редактор Inkscape.
Расширение EggBot Control для Inkscape это утилита, при помощи которой можно тестировать и управлять Яйцеботом, а также отправлять на рисование ваши ресунки. После того как Inkscape запущен, в меню Extensions ищите подменю Eggbot.
Если у вас Inkscape при попытке управления ботом выдаёт ошибку «Failed to connect to EggBot», то не отчаивайтесь. Проблему можно легко решить. Посмотрите в списке подключенного оборудования, то как называется ваша плата. Затем в файле ebb_serial.py плагина для Inkscape замените в строке 52 текст «USB-SERIAL CH340» на ваше название.
Для ваших рисунков вы можете использовать шаблон (File->New from Template).
Источник
3D печатный яйцебот всего за $15. Рецепт приготовления

Пасха заканчивается и тема печати различных узоров на яйцах становится чуть менее актуальной, но от этого не становится менее актуальным яйцебот, нужный всем и всегда круглый год 🙂
Для тех кто не в курсе яйцебот — это машина, которая обычным фломастером умеет рисовать на любых сферических объектах: яйцах, теннисных шариках, ёлочных игрушках. Концепт механизма придумал дизайнер Bruce Shapiro в далеком 1990-м году, а не так давно знаменитая компания Evil Mad Scientist Laboratories выпустила в свободную продажу свою версию под названием The EggBot. Надо отдать должное Evil Mad Scientist Laboratories свой проект сделала открытым и разрешает пользоваться программным обеспечением для других яйцеботов даже в коммерческих проектах.
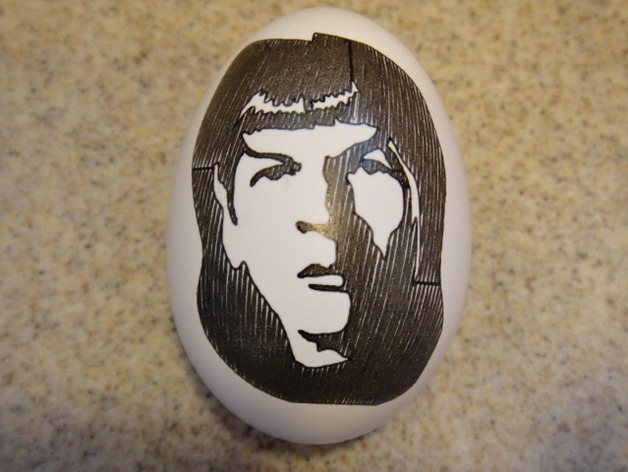
Вот такие произведения искусства получаются на выходе:
Простые картинки можно рисовать в любом векторном редакторе, а сложные геометрические объекты можно создать, например, на питоне.
А вот получившееся изображение уже на яйце:
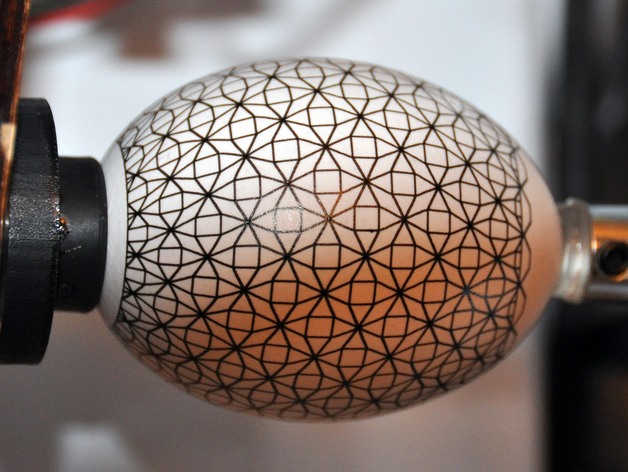
Энтузиасты создают даже картинки со стробоскопическим эффектом при вращении:
При создании своего яйцебота я не ставил перед собой цели уложиться в $15, но так уж вышло :). Для сравнения оригинальный Eggbot Pro стоит $325, что дороже на порядок. Основная стоимость любого яйцебота — шаговые двигатели. Я использовал самые доступные — 28BYJ-48-12V, отсюда и итоговый ценник в 15 баксов.
Итак для приготовления моего яйцебота вам понадобится:
1. 110 грамм пластика ABS или PLA. Черные детали я печатал ABS-ом, желтые PLA. Уж больно PLA красив при печати на стекле 🙂
2. Электроника в ассортименте:
- 1 x Китайская Arduino UNO c Aliexpress с кабелем для компа за 250 руб.
- 2 x 28BYJ-48-12V Шаговый двигатель + ULN2003 Драйвер шагового двигателя за 100 руб.
- 1 x SG90 Микро серво двигателььза 100 руб.
- 1 x 12V Блок питания (можно и не покупать если есть).
3. То что не можем напечатать, но можем купить почти в любом хозяйственном магазине:
- пружина.
- болты, винты, гайки, шайбы.
- резиновая прокладка (можно и напечатать, если у вас есть Flex).
- подшипник 608.
Пластик засовываем в 3Д принтер и печатаем детали, модели которых я заботливо поместил сюда.
Подробно о том чего и сколько печатать, где конкретно взять электронику, сколько и каких болтов надо смотрим тут.
Тем кто еще не приобрел 3Д принтер, но очень хочет приготовить своего яйцебота я могу напечатать все детали и отправить почтой. Обращайтесь в личку, все будет в лучшем виде! Я гарантирую это!
После печати можно приступить к сборке. Сборка устройства выглядит примерно так:
Для того, чтобы у вас все получилось я потратил много времени и подготовил инструкцию по сборке и подключению электроники в картинках. Скачать инструкцию можно тут.
После печати и сборки у вас должно получиться такое устройство:
После окончания сборки, в яйцебота нужно поместить прошивку. Так, как мозгом устройства является обычная ардуино, у вас не должно возникнуть с этим проблем.
- Скачиваем и распаковываем прошивку отсюда.
- Загружаем Arduino IDE, устанавливаем и запускаем.
- Подключаем яйцебота к компьютеру, выбираем в Arduino IDE модель платы и COM порт.
- Открываем файл Eggduino.ino из папки с прошивкой и загружаем ее в Arduino.
В качестве управляющей программы используется всем известный Inkscape с плагином, написанным Evil Mad Scientist Laboratories. Плагин позволяет настраивать яйцебота, управлять им вручную и отправлять картинки на печать. Я заботливо добавил плагин в Inkscape и поместил готовый архив тут.
Если у вас уже есть Inkscape, но нет плагина, то взять его отдельно можно тут.
Скачиваем, устанавливаем и запускаем Inkscape. Идем в меню с плагинами, ищем там подменю EggBot. Открываем плагин, настраиваем высоту поднятия фломастера и печатаем на яйце все что угодно.
Если у вас Inkscape при попытке управления ботом выдаёт ошибку «Failed to connect to EggBot», то не отчаивайтесь. Проблему можно легко решить. Посмотрите в списке подключенного оборудования, то как называется ваша плата. Затем в файле ebb_serial.py плагина для Inkscape замените в строке 52 текст «USB-SERIAL CH340» на ваше название.
Еще я собрал и выложил небольшую коллекцию с примерами. Посмотреть ее можно тут.
Источник
DIY Arduino Controlled Egg-Bot

Introduction: DIY Arduino Controlled Egg-Bot



In this instructables I will show you how to make your own Egg-Bot controlled with Arduino. I wanted to make it before but I thought it is too hard for me but I was wrong. It’s easy to build so for sure everyone can do it.
Step 1: Parts
Below I add list of parts:
- Stepper motors
- Stepper motor drivers
- Arduino
- Power supply
- Micro Servo
- Plastic plate, wood
- 40cm screws x3 and 12 nuts for it’s
- Two lego wheels
- Markers in different colors
- Drill, knife, saw, screwdriver, double-sided tape, wood glue, wire, soldering iron, rubber bands
- Everything you need to make PCB link.
Step 2: Connection
Connect it like on fritzing image above or go to the next step and make PCB (printable circuit board). And you must find right settings for potentiometer on stepper motors controller. With this potentiometer you can control voltage that goes to stepper motors. Try to set it that the stepper move is as smooth as it possible.
Step 3: PCB (optional)
Why I made PCB? Look at the image above, it shows how it looks on breadboard. Too many wires. You can easily connect something wrong or something can disconnect itself and you can spoil e.g: stepper motor driver. And on PCB everything looks better, take less place and is reliable in combined. You can read about how to make PCB here. Below I added PDF file with PCB layout. For more info see arduino on breadboard.
Attachments
Step 4: Frame
The frame is made with plastic and some wood. You can see dimensions in sketchup below or in next step.
Attachments
Step 5: Cutting of the Frame
Cut two elements from second picture and one from the third picture. Dimensions are shown in the pictures.
Step 6: Smoothing the Edge
Smooth the edges with sandpaper to make them look better.
Step 7: Drilling Holes
Drill holes like on image above. You need to make it very precisely. In the 3 holes at the corners put pieces of aluminum tube.
Step 8: Pen Arm
Pen arm is made with wood and plastic. At the end of the arm I made 9mm hole for marker
Step 9: Connection Frame
I hope you understand how to connect all of parts of frame with this photo if you have problems with it, write a comment I will try to help. Everything is connected with screws, double sided tape, glue and wires.
Step 10: Code for Arduino
Download code for arduino from here. And you need to change few lines:
Step 11: Software for Computer
I propose to install original eggbot extension to inkscape because with it you can print filled object. You can read how to download it and how to use here. To make G-code files in inkscape download this extension made by martymcguire. And the last thing to download is a program to sending commands over serial to arduino. Download it here. Now you need to change unicorn extension code. Go to:
Add to 29 line this:
And delete line 39:
Step 12: First Painting
This are first eggs that I painted by my eggbot. Effect is no the best because of pen vibration. I all the time try to fix it but I can’t do it succesfully yet. Picture on the orange egg is supposed to represent a bear.
Please, if you like my project vote for me. Thanks.
Thanks for reading and sorry for my English 🙂
Have fun with your EggBot.


1 Person Made This Project!

Did you make this project? Share it with us!
Recommendations




Robots Contest
Space Contest

Micro:bit Contest

52 Comments
Question 2 years ago on Step 12
I’m not understanding the part that holds the egg. What did I miss?

Answer 1 year ago
Well from what I can see, figure, it’s held by the two tires, the black things at each end of the egg. 🙂
Question 2 years ago on Introduction
Hi, I have started an eggbot Project too. I use arduino uno and a code from Joachim Cerny. there is a Problem to connect the inkscape to the board. nothing happens and it does not realise the board Version. do you have any idea?
then I tried to do it your way but could not find the spherebot-GUI.exe in the bin Folder.
do you have any idea how connect inkscape to my arduino eggbot?
Источник
Eggbot своими руками arduino uno
Цена: 50 руб.
—————————————— Терморезистор 10 кОм 1%: 
Цена: 50 руб.
——————————————
3d печать на заказ: 
Печать на 3D принтере
Собираем знаменитый яйцебот ( EggBot).
Увидел в сети, как некий чпу агрегат (EggBot) разрисовывает пасхальные яйца. Дело было перед новогодними праздниками поэтому решил, что он вполне сгодится для раскрашивания новогодних шаров.
Нашел в сети более-менее дизайнерский вариант, вот такой:

eggbot на thingiverse
Эта модель выглядит прилично, красиво и есть место крепления для платы управления, плюс можно спрятать все провода внутри корпуса — он, как оказалось, полый внутри. Все продумано.
Прикинул в уме что потребуется:
2шт Nema17 или анлоги
2шт драйвера A4988 или аналоги
1шт серва SG90
1шт arduino uno
1шт cnc shield
2шт подшипников 623 (в крайнем случае, можно обойтись и без них..)
пара пружинок,резинка,болтики, гайки… маркер с тонким жалом.
Распечатал все детали и собрал агрегат воедино:

Осталось установить маркер и шар.
Первая засада:
На всех сайтах для данного агрегата продают специальный шилд по 30 евро, с wi-fi на борту и специальным плагином и прогой для работы с компа.
Но мы не гордые и лишних денег нет, поэтому юзаем обычный cnc-шилд. На борту шилда есть все необходимое — разъемы для 4 драйверов и куча выводов, к которым можно подрубить серву.
Вот так выглядит cnc шилд:

Если хотим максимальное качество прорисовки узоров, то ставим все перемычки M0,M1,M2 для осей X и Y, устанавливаем на свои места драйвера А4988.
Далее заливаем прошивку GRBL:
Заливается прошивка через Arduino IDE. Файл для заливки через IDE спрятан тут (как и инструкция, как это сделать): https://github.com/robottini/grbl-servo/tree/master/examples/grblUpload
У кого не получается залить прошивку, делаем так:
файл grblUpload.ino копируем в папку с остальными файлами grbl-servo-master
переименовываем файл grblUpload.ino в grbl-servo-master.ino
внутри файла grbl-servo-master.ino заменяем строчку
#include
на
#include «grbl.h»
Далее все должно компилиться..
Следующую процедуру можно не делать, но желательно (указываем кол-во шагов для каждого двигателя ):
Правим в файле defaults_generic.h (в каталоге defaults) вот эти две строки:
#define DEFAULT_X_STEPS_PER_MM 250.0 //заменяем на 32
#define DEFAULT_Y_STEPS_PER_MM 250.0 //заменяем на 32
откуда берется 32:
3200 — это количество шагов двигателя на один полный оборот при всех выставленных перемычках драйвера А4988 (микрошаг 1/16) и двигателе 1,8 гр/шаг
Предполагаем, что длина окружности 100мм (по Х и У), поэтому считаем, что на 1мм приходится 32 микрошага (3200/100=32). Можно выставить любые другие значения, от этого зависит только масштаб картинки в редакторе.
Либо заливаем прошивку как есть и потом правим из программы gcodesender при помощи команды $$ (выводит текущие настройки), забегая вперед, покажу как это сделать:
после команды $$ терминал должен выдать примерно следующее:
…
$100=314.961 (x, step/mm)
$101=314.961 (y, step/mm)
$102=314.961 (z, step/mm)
$110=635.000 (x max rate, mm/min)
$111=635.000 (y max rate, mm/min)
$112=635.000 (z max rate, mm/min)
$120=50.000 (x accel, mm/sec^2)
$121=50.000 (y accel, mm/sec^2)
$122=50.000 (z accel, mm/sec^2)
$130=225.000 (x max travel, mm)
$131=125.000 (y max travel, mm)
$132=170.000 (z max travel, mm)
Чтобы задать новое кол-во шагов для оси Х пишем: $100=32
Все, новые значения заданы и ничего не надо править в прошивке..
Можно, конечно, совсем ничего не править, но тогда размер изображения будет 12,8мм х 4мм — рисовать можно, тем более это векторный рисунок, но постоянно масштабировать скачанные картинки очень неудобно..
Засада вторая:
По идее, шим сигнал для сервы берется с платы с вывода SpnEn(управление шпинделем), но не все так просто.
В новой прошивке GRBL 0,9 сделали переназначение пинов и теперь шим сигнал управления выводится на пин Z+ из ряда пинов END STOPS.
Поэтому подключаем серву вот к этим выводам (про +5V и GND не забываем):

подключение сервы к CNC shield
Вроде все готово.
Как управлять:
Обычный Pronterface тут не подходит.. Поэтому качаем любую программу по работе с лазерным гравировщиком,фрезером или простой gcode sender. Я взял вот этот вариант: https://github.com/grbl/Universal-G-Code-Sender
Выставляем com-порт и скорость соединения 115 200 бод.
Все должно подключиться.
Картинка примерно вот такая:

Осталось выяснить, какой ширины картинку можно нарисовать на шаре/яйце..
Переводим руками маркер в крайнее левое положение как на картинке:
Нажимаем в интерфейсе кнопку Y+ и смотрим, при каком значении Y маркер окажется в крайнем правом положении. Для объектов разной формы и размеров это значение может немного отличаться, т.к. конструкция зажима не всегда обеспечивает симметричный зажим.
Теперь, у нас есть размер поля в мм. По Х — 100мм, а по Y — примерно 30мм.
Кто умеет подготавливать файлы для лазерной резки, дальше можно не читать, а смотреть только видео в конце статьи.
Подготавливаем GCODE:
Управление сервой производится командой M3 S254 (повернуть серву на 360гр) и M3 S0 (повернуть в исходное положение) (либо M5 — выключение сервы). Для лазерных резаков эта команда задает мощность лазера, а для шпинделя фрезера — кол-во оборотов.
Можно пользоваться любым преобразователем векторной графики в gcode, который умеет вставлять нужную нам команду управления M3.
Самый удобный из легко-доступных редакторов векторной графики — Inkscape (качаем тут)
Сразу качаем для него плагин для g-кодов тут. Можно сразу туториалы почитать.
Очень хороший плагин. В отличии от всех других плагинов он работает на всех типах винды без проблем и без танцев с бубном — поставил, и все заработало.
Просто копируется все содержимое плагина в папку «..inkscape\share\extensions».
Источник