Георадар своими руками
Исследователи, поисковики и просто охотники за археологическими сокровищами — это особая порода людей. Часто их упрекают в меркантильности, но едва ли только жаждой наживы можно объяснить такое стремление к исследованию тайн прошлого. Для того чтобы найти несколько монет, которые могут и стоить-то всего ничего, приходится тяжело и упорно трудиться, вкладывать кучу денег в технику и оборудование. О некоторых видах такого оборудования мы поговорим сегодня.
Что такое георадар
Говорят, что можно исследовать почву любого состава на глубине до ста метров просто голыми руками. У эзотериков есть своя теория на этот счёт и, возможно, она имеет право на жизнь и может эффективно работать. Но поскольку современный человек привык во всем полагаться в основном на технику, то и исследования грунта опираются пока в основном только на технические средства.
Для поиска металлов существуют самые разнообразные металлодетекторы, однако начиная с середины 70-х годов прошлого века на рынки вышел, правда в очень ограниченном количестве, георадар. Это современный технологичный прибор, который способен зондировать, то есть проводить недеструктивный мониторинг любой среды, независимо от её химического состава и физического состояния. Это может быть как вода, лёд, песок, бетон, камень, грунты абсолютно разных видов и другие моногамные среды.

Где применяют георадары
Сфера применения георадара чрезвычайно широка, но его развитие и популярность были очень нестабильны в разное время. Дело в том, что когда в 70-х годах георадар только вышел из лабораторных стен, он привлёк к себе пристальное внимание. Позднее, лет десять устройство было не востребовано, поскольку технологии не позволяли реализовать весть его потенциал. В 80-е годы снова наблюдался некоторый всплеск интереса к устройству в связи с развитием микропроцессорной электроники, но она не в силах была обработать тот массив данных, который выдавал георадар.
Наконец, последние несколько лет компьютерные технологии позволили с горем пополам справляться с той уникальной информацией, предоставляемой прибором и главное, люди научились её использовать. Начали появляться устройства не только для широкого применения, но и узкоспециализированные приборы:
георадары для работы в скважинах и шахтах;
приборы для дефектоскопии поверхностей;
георадары для строительных работ;
устройства для постройки и планировки автомобильных дорог.
Причём, все эти изыскания проходят с высочайшей степенью точности.

Цена и принцип действия устройства
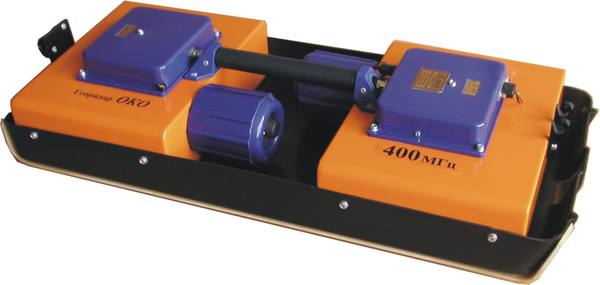
Не каждый кладоискатель сможет позволить купить такое устройство. Цена отечественного георадара ОКО составляет от 5 до 15 тысяч евро, а импортные приборы могут стоить и за 30-50 тысяч, так что особой популярностью у публики устройство пока пользоваться не может. Естественно, встанет вопрос о том, как собрать георадар своими руками. К сожалению, реализация такого сложного проекта пока не под силу большинству инженеров, а тем более, кустарным мастерам.
Дело в том, что георадар состоит из нескольких основных блоков:
- Передающей и приёмной антенны.
- Блок приёма и обработки информации.
- Оптоэлектрические преобразователи, которые и составляют самую большую сложность в изготовлении.
Принципиальная схема георадара представлена на картинке ниже и по ней можно судить о сложности каждого из её элементов.

Принцип работы георадара основан на отражении волн предметами самого разного состава и в самых разных средах. К примеру, обычный глубинный металлоискатель может обнаружить металлы на относительно небольшой глубине и с очень невысокой степенью точности. На способность прибора обнаружить металлический объект сильно влияет металлизация почвы и уж совсем не стоит говорить о способности металлоискателя обнаруживать полости, пещеры, подземные хода, подлёдные пустоты.
Основные элементы устройства
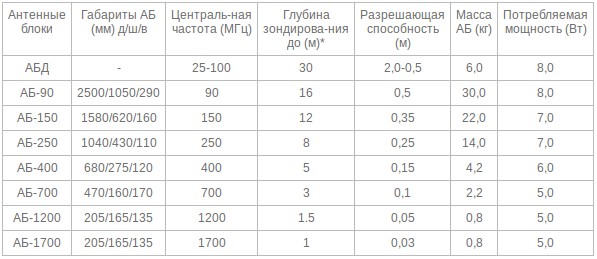
Одним из основных элементов георадара считается антенный блок. В зависимости от частоты, с которой он работает, он может зондировать совершенно разные глубины. Существуют модели антенных блоков комбинированные. Они позволяют за один проход сканирования разреза получить информацию о профиле как на большой глубине залегания (до 25 метров), так и получить данные высокого разрешения о верхних слоях разреза. Чем ниже частота антенного блока, тем глубже проводится сканирование. При высокочастотном сканировании получают информацию о слое до двух метров, при этом частота излучения составляет от 900 до 2500 МГц.
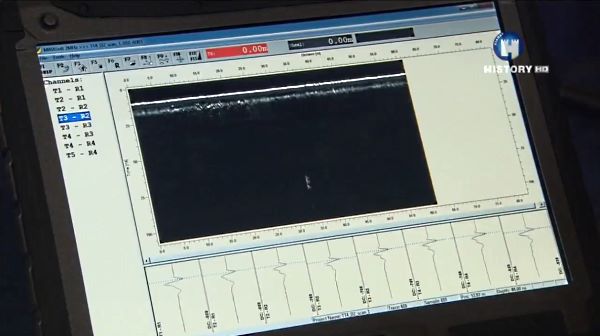
Без программного обеспечения, способного анализировать полученные данные, применение прибора бессмысленно. Именно поэтому в состав георадара входят мощные и компактные вычислительные модули со специальным программным обеспечением. Вся информация о результатах зондирования выводится в реальном времени на экран ноутбука или специальный монитор. Во время сканирования выполняется полная визуализация полученных данных и составляется трёхмерная модель зондируемого участка. Благодаря такой возможности устройства стало просто определить координатное положение труб, пустот, кабелей и других объектов в грунте и в воде.

Безусловно, георадар — это профессиональное устройство, которое базируется не только на сложнейшей технике, но и на не всем доступных данных о почвах, без которых ПО не может работать корректно. Так что кладоискателям придётся несколько десятков лет подождать, пока устройство станет доступнее или же внимательно читать эзотерическую литературу, которая, кстати, также не слишком доступна.
Источник
Самодельный радар с монитором на Ардуино
Не знаю кто как, но я давно хотел сделать радар, такой чтоб туда-сюда излучатель крутился и на экране видно было наличие и дистанцию до объектов. Конечно в домашних условиях вещь, подобную военным или авиа службам сделать не получится — там и мощности, и размеры недосягаемые. Но что-то похожее, причём совсем не сложное и не дорогое (пару тысяч рублей) соорудить возможно. Итак, на основе популярного Ардуино вы можете сделать такую себе мини РЛС с помощью ультразвукового детектора и собственно платы Arduino. Схема подсмотрена на сайте «Мехатроник». Все, что нужно для этого проекта: ультразвуковой датчик для обнаружения объектов, маленький серводвигатель для поворота датчика и плата Arduino для управления ими. Ну и макетка с проводами.

Сначала сделаем крепление для подключения ультразвукового датчика к серводвигателю. Изготавливаем его, как это показано на рисунке ниже, потом он приклеивается и крепится к двигателю с помощью винта.

Теперь прикрепите штырьки, на которые припаяем 4 провода для подключения датчика.

Прикрепите мотор сервопривода к плате Arduino, используя обычную резинку для волос.

Мы подключили ультразвуковой датчик HC-sr04 к выводам 10 и 11, а серводвигатель к 12 контакту на плате Arduino.

Исходный код
Теперь нужно взять код и загрузить его на плату Ардуино, которая позволит взаимодействовать между Arduino и обработкой сигнала. Здесь будем получать значения для угла и расстояние, измеренное с помощью датчика с платы Arduino на обработку IDE с помощью функции SerialEvent(), которая считывает данные из последовательного порта, и будем ставить значения угла и расстояния в переменные iAngle и iDistance. Эти переменные будут использоваться для построения линии обнаружения объектов.
void drawRadar() <
pushMatrix();
translate(960,1000); // moves the starting coordinats to new location
noFill();
strokeWeight(2);
stroke(98,245,31);
// draws the arc lines
arc(0,0,1800,1800,PI,TWO_PI);
arc(0,0,1400,1400,PI,TWO_PI);
arc(0,0,1000,1000,PI,TWO_PI);
arc(0,0,600,600,PI,TWO_PI);
// draws the angle lines
line(-960,0,960,0);
line(0,0,-960*cos(radians(30)),-960*sin(radians(30)));
line(0,0,-960*cos(radians(60)),-960*sin(radians(60)));
line(0,0,-960*cos(radians(90)),-960*sin(radians(90)));
line(0,0,-960*cos(radians(120)),-960*sin(radians(120)));
line(0,0,-960*cos(radians(150)),-960*sin(radians(150)));
line(-960*cos(radians(30)),0,960,0);
popMatrix();
>
Для рисования линии, которая движется вдоль радара, сделана функция drawLine(). Переменная iAngle используется как линия, что перерисовывается для каждой ступени.
void drawLine() <
pushMatrix();
strokeWeight(9);
stroke(30,250,60);
translate(960,1000); // moves the starting coordinats to new location
line(0,0,950*cos(radians(iAngle)),-950*sin(radians(iAngle))); // draws the line according to the angle
popMatrix();
>
Для прорисовывания обнаруженных объектов служит функция drawObject(). Она получает расстояние от ультразвукового датчика, преобразует его в пикселах, и в сочетании с углом датчика рисует объект на радаре — экране ЖК монитора.
void drawObject() <
pushMatrix();
translate(960,1000); // moves the starting coordinats to new location
strokeWeight(9);
stroke(255,10,10); // red color
pixsDistance = iDistance*22.5; // covers the distance from the sensor from cm to pixels
// limiting the range to 40 cms
if(iDistance
| ||
 Используйте технологию дополненной реальности, чтобы легко ремонтировать и отлаживать радиоэлектронные проекты в онлайн режиме.
Используйте технологию дополненной реальности, чтобы легко ремонтировать и отлаживать радиоэлектронные проекты в онлайн режиме. Кодовая кнопка для ограничения доступа к объектам, простая схема с реле на МК Attiny13.
Кодовая кнопка для ограничения доступа к объектам, простая схема с реле на МК Attiny13.
 , задаваемый командой:
, задаваемый командой:
 и высотой
и высотой  ), протяженность модели по оси Z имеет величину, равную шагу дискретизации
), протяженность модели по оси Z имеет величину, равную шагу дискретизации  .
.
 , выраженная в сантиметрах в наносекунду — принятая в радиолокации единица скорости, определяется выражением:
, выраженная в сантиметрах в наносекунду — принятая в радиолокации единица скорости, определяется выражением: 

 — частота в ГГц).
— частота в ГГц). 

 ) и равный 2 мм = 0,002 м из соображений удобства (в 1 см укладывается целое число шагов):
) и равный 2 мм = 0,002 м из соображений удобства (в 1 см укладывается целое число шагов): и относительной диэлектрической проницаемостью
и относительной диэлектрической проницаемостью  командой:
командой: , равной единице (магнитные свойства отсутствуют), 0 — отсутствию магнитных потерь, а sand — метка этого материала).
, равной единице (магнитные свойства отсутствуют), 0 — отсутствию магнитных потерь, а sand — метка этого материала). ,
,  ,
,  ).
).  :
: 
 электрического поля и компоненты
электрического поля и компоненты  и
и  магнитного поля.
магнитного поля. 0$» data-tex=»inline»/>
0$» data-tex=»inline»/> 

 :
: