Как сделать гироскутер своими руками в домашних условиях?
Если вы думаете, что гироскутер или мини-сигвей невозможно сделать дома своими руками и силами, то вы далеко заблуждаетесь. Как ни странно, в интернете есть много видео, где многие умельцы делают именно свой гироскутер. У некоторых он получается очень самодельный, но есть и те, кто смог по настоящему приблизиться к самой технологии создания и воспроизвести по настоящему интересную и качественную вещь. Так можно ли сделать гироскутер своими руками? Нам расскажет об этом Adrian Kundert — инженер и просто хороший человек.
Что такое гироскутер?
Как сделать гироскутер своими руками? Для того, чтобы понять как сделать самодельный гироскутер, нужно для начала понять — что такое гироскутер, из чего он состоит и что нужно для создания этого интересного средства передвижения. Гироскутер — это самосбалансированное средство передвижения, принцип работы которого стоит на системе гироскопических датчиков и внутренней технологии удержания баланса рабочей платформы. То есть когда мы включаем гироскутер, включается и система балансировки. Когда человек встает на гироскутер, начинается меняться положение платформы, эта информация считывается как раз гироскопическими датчиками.
Эти датчики считывают любое изменение положения относительно земной поверхности или точки от которой идет гравитационное воздействие. После считывания, информация подается на вспомогательные платы, которые находятся по обе стороны платформы. Так как датчики и сами электродвигатели работают независимо друг от друга, то в дальнейшем нам понадобятся два электродвигателя. От вспомогательных плат, информация в обработанном виде уже идет в материнскую плату с микропроцессором. Там уже с необходимой точностью выполняется программа удержания баланса.
То есть если платформа наклоняется вперед, примерно на несколько градусов, то двигателям подается сигнал на движение в обратное направление и платформа выравнивается. Также выполняется и наклон в другую сторону. Если же гироскутер наклоняется на больший градус, то программа сразу же понимает, что идет команда о движении вперед или назад электродвигателям. Если гироскутер наклоняется больше чем на 45 градусов, то двигатели и сам гироскутер отключается.
Гироскутер состоит, из корпуса, стальной или металлической основы, на который и будет крепится вся электроника. Дальше идет два электродвигателя с той мощностью, чтобы была возможность ездить под весом человека до 80-90кг. Дальше идет материнская плата с процессором и две вспомогательные платы, на которых как раз и стоят гироскопические датчики. И конечно же аккумулятор и два колеса с одинаковым диаметром. Как сделать гироскутер? Для решения этого вопроса, нам понадобится добыть определенные детали конструкции самого гироборда.

Двигатели с колесами
Что же нам понадобится?
Как сделать гироскутер своими руками? Первое и основное что понадобится, это два электрических двигателя, с мощностью способных перевозить вес взрослого человека. Средняя мощность у заводских моделей составляет 350 Ватт, поэтому постараемся найти двигатели такой мощности.
Дальше конечно же нужно найти два одинаковых колеса, примерно 10-12 дюймов. Лучше побольше, так как электроники у нас будет много. Чтобы проходимость была выше и расстояние между платформой и землей было на нужном уровне.
Два аккумулятора, свинцово-кислотных, нужно выбрать номинальную мощность как минимум 4400 мА/ч, а лучше больше. Так как мы будем делать не металлическую конструкцию, но она будет весить больше чем оригинальный мини-сигвей или гироскутер.
Производство и процесс
Как сделать гироскутер, мощный и чтобы он сам держал баланс при езде? Сначала нужно построить план, какое именно средство передвижения нам понадобится. Нам нужно сделать довольно мощное средство передвижения с большими колесами и большой проходимостью по разным дорогам. Минимальное значение беспрерывной езды должно составлять 1-1.5 часа. Мы потратим примерно около 500 евро. Поставим беспроводную систему управления нашему гироскутеру. Поставим считывающее устройство неполадок и ошибок, вся информация будет идти на SD-карту.
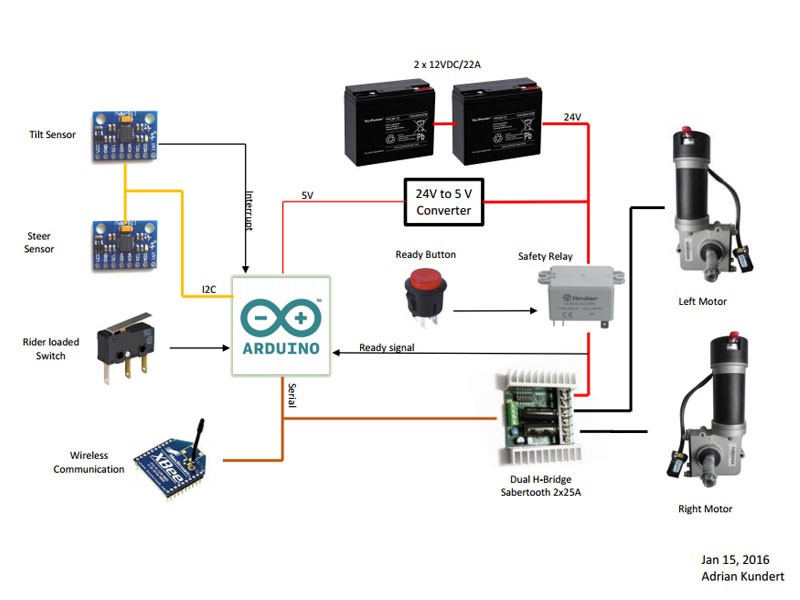
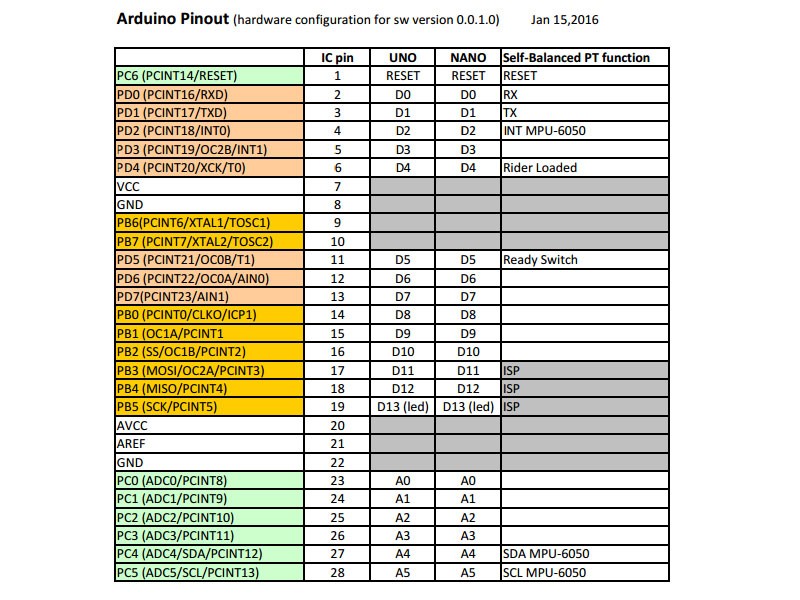
На схеме выше можно все четко увидеть: электродвигатели, аккумуляторы и прочее. Для начала нужно выбрать именно тот микроконтроллер, который и будет осуществлять управление. Из всех представленных на рынке микроконтроллеров Arduino мы с вами выберем UnoNano, и в качестве дополнительного чипа обработки информации будет выступать ATmega 328.
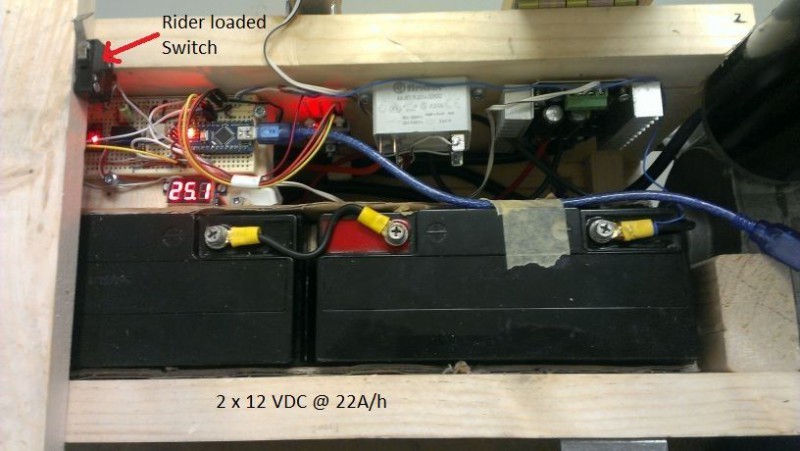
Но как сделать гироскутер безопасным? Два аккумулятора у нас будут подсоединены последовательно, так мы получим нужное напряжение. Для электродвигателей, как раз и понадобится сдвоенная мостовая схема. Будет поставлена кнопка готовности, по нажатию которой и будет поступать питание на двигатели. При отжимании этой кнопки, двигатели и сам гироскутер будет отключаться. Нужно это для осуществления безопасной езда самого водителя и нашего средства передвижения.
Микроконтроллер Arduino будет на скорости около 38400 БОД, использовать последовательную связь со схемой XBee. Мы будем использовать два гироскопических датчика InvenSense MPU 6050 на базе модулей GY-521. Они в свою очередь будут считывать информацию о положении платформы. Эти датчики достаточно точны для того, чтобы сделать мини-сигвей. Эти датчики будут расположены на двух дополнительных вспомогательных платах, которые будут осуществлять первичную обработку.

Мы будем использовать шину I2C, она имеет достаточную пропускную способность, чтобы быстро связывать с микроконтроллером Arduino. Гироскопический датчик имеющий адрес 0x68 имеет частоту обновления информации раз в 15 мс. Второй же датчик адресов 0x68 работает напрямую от микроконтроллера. У нас так же есть выключатель нагрузки, он переводит гироскутер в режим удержания баланса, тогда когда платформа находится в ровном положении. В этом режиме гироскутер остается на месте.

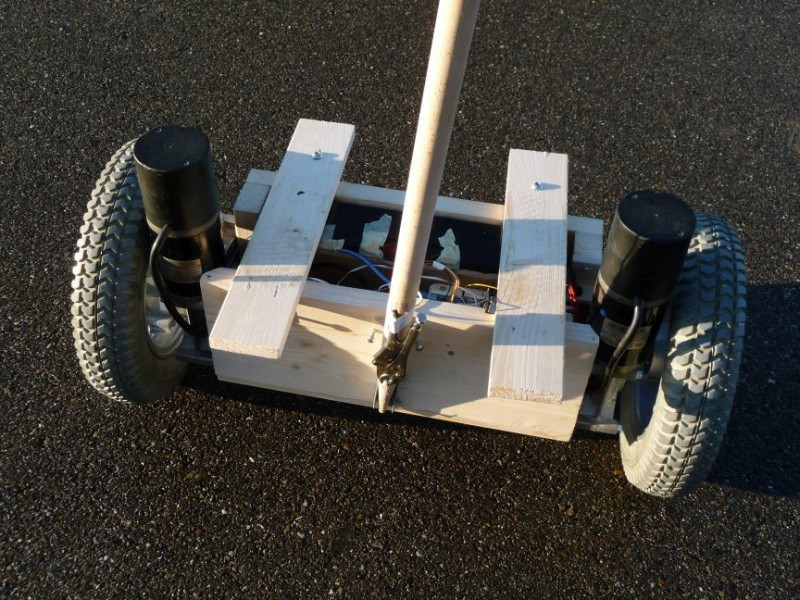
Три деревянные детали, на которых и будет располагаться наши колеса и электродвигатели. Рулевой столб, сделан из обычной деревянной палки он будет крепиться к передней части самого гироскутера. Тут можно взять любую палку, даже черенок от швабры. Нужно обязательно учесть тот факт, что аккумуляторы и другие схемы, будут производить давление на платформу и тем самым балансировка будет немного перенастроена, именно в ту часть, где будет больше давление.
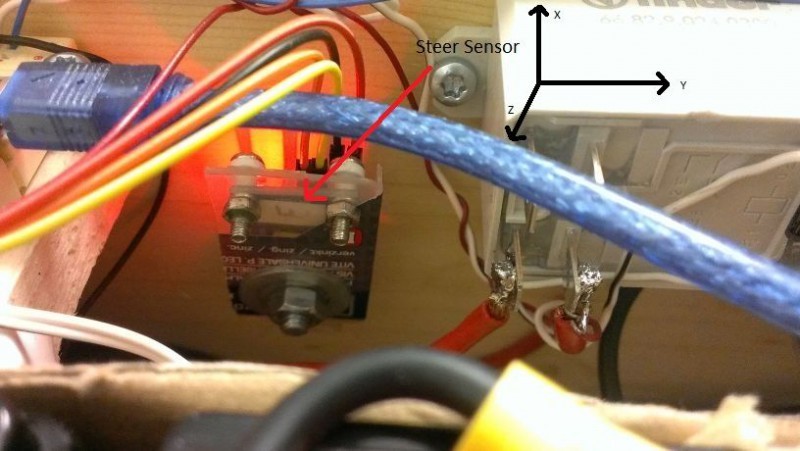
Устанавливка гироскопического датчика
Двигатели же нужно равномерно распределить справа и слева по бокам платформы, а аккумулятор максимально посередине в специальной коробке. Крепим рулевой столб на обычные финты и присоединяем кнопку готовности к верхней части палки. То есть если что-то пошло не так и кнопка отжата, то гироскутер будет выключаться. В дальнейшем эту кнопку можно переделать в подножную часть или настроить на определенный наклон самой платформы, но мы пока делать этого не будем. Закажите доработку сайтов вордпресс здесь.
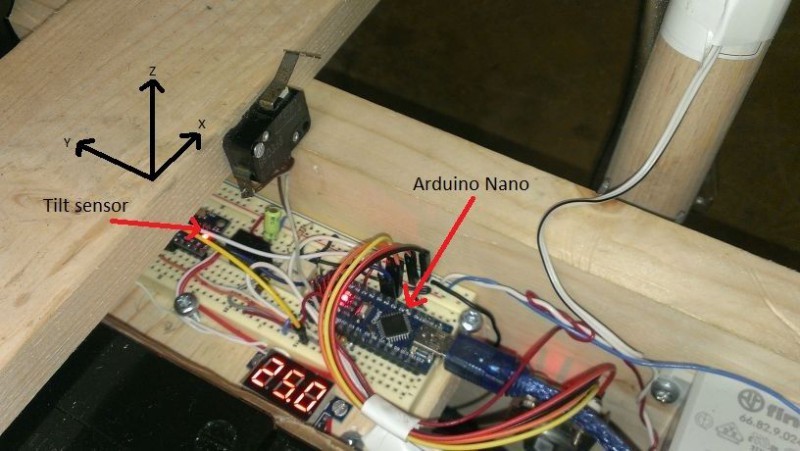
Устанавливаем на плату микроконтроллер
Внутренняя схема и спайка всех проводов, производится по той же схеме. Дальше нужно подключить два гироскопических датчика к нашему микроконтроллеру, по мостовой схеме с двигателем, по данной таблице.
Датчики балансировки должны быть установлены параллельно земле или вдоль самой платформы, а вот датчики поворота направо и налево должны быть установлены перпендикулярно гироскопическим датчикам.

Настройка датчиков
Дальше производим настройку микроконтроллера, загружаем исходный код. Дальше нужно проверить правильную взаимосвязь между гироскопическими датчиками и датчиками поворотов. Используйте программу Arduino Terminal по программированию и настройке гироскутера. Обязательно нужно настроить ПИД регулятор баланса. Дело в том, что вы можете выбрать двигатели с другой мощностью и характеристиками, для них настройка будет другой.
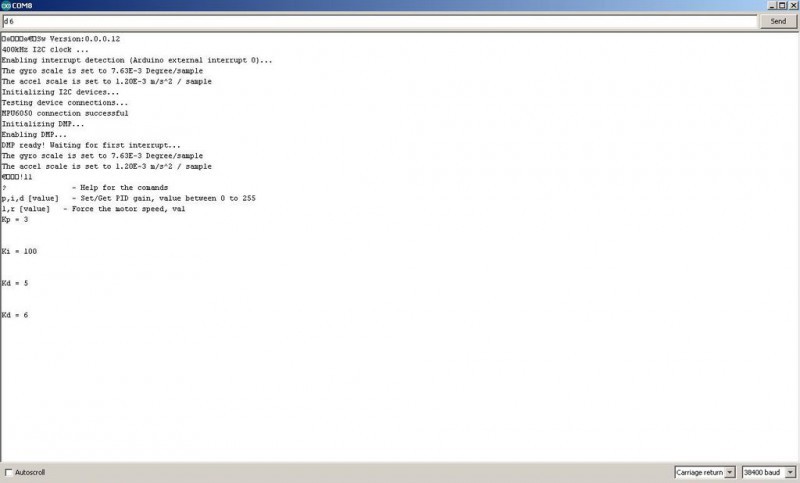
Программа Arduino Terminal
Есть несколько параметров в этой программе. Первый самый главный параметр, это параметр Kp, он отвечает за балансировку. Сначала увеличьте этот показатель, для того чтобы ввести гироскутер в нестабильный вид, а потом уменьшайте показатель до нужного параметра.
Следующий параметр, это параметр Ki он отвечает за ускорение гироскутера. При снижении угла наклона скорость уменьшает или увеличивается при обратном действии. и последний параметр, это параметр Kd, он возвращает саму платформу в ровное положение , а двигатели приводит в режим удержания. В этом режиме гироскутер просто стоит на месте.
Дальше вы включаете кнопку включения микроконтроллера Arduino и гироскутер переходит в режим ожидания. После того как вы встали на сам гироборд, вы встаете ногами на нажимную кнопку, так гироскутер переходит в режим «на месте». Включаются датчики балансировки и при изменении угла наклона, гироскутер едет вперед или назад. При каких либо поломках, можно без проблем осуществить ремонт гироскутера своими руками.
Источник
Самодельный гироскутер
Насмотревшись роликов на Youtube и на своих детей, пускающих слюни на арендуемые гироскутеры, решил попробовать свои силы в самостоятельной сборке данного устройства. Рассуждая о целесообразности сделать самому или купить, убедил себя, что это игрушка, причем сезонная, причем для моих детей погодок одним устройством не обойтись. Также в самоубеждении сыграл роль опыт сборки домашнего ЧПУшного станка, ну и собственно популярность самого тренда гироскутеров и вау эффект на окружающих меня обывателей.
Опыт сборки гироскутера собственными силами
Приступая к работе, решил сначала опробовать концепцию и определиться с необходимой мощность электромеханических узлов, чтобы обосновать дальнейшие вложения в комплектующие.
Первая версия (сигвэй)
С механической точки зрения вариант сигвэя казался более простым (отсутствует нагруженный средний поворотный узел), кроме того все, что нашел на youtube это самоделки именно сигвэев.
Не смотря на то, что имею достаточный опыт в программировании и работе с контроллерами решил софт самостоятельно не писать, а найти наиболее готовые решения. Кроме того, я редко могу поддержать свою мотивацию более одного месяца, а отладка работы софта с электромеханическими узлами редко заканчивается абсолютной победой, чаще компромиссом, и мысль о том, что совершенство не достигнуто меня бы червоточила.
В итоге выбор пал на работу Ovaltine’s Segway Clone (исходники есть на GitHub). Данный проект мне показался наиболее зрелым и поддерживающим железо, которое у меня есть (Arduino, MPU-6050, драйвера моторов с 2-мя и 3-мя управляющими сигналами на канал). Проект исчерпывающе прокомментирован, что позволяет не углубляться в анализ нюансов и как результат не догадываться о недочетах.
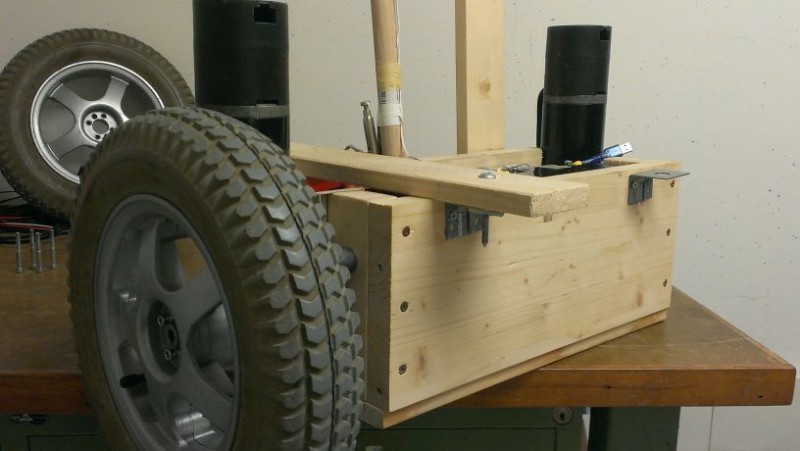
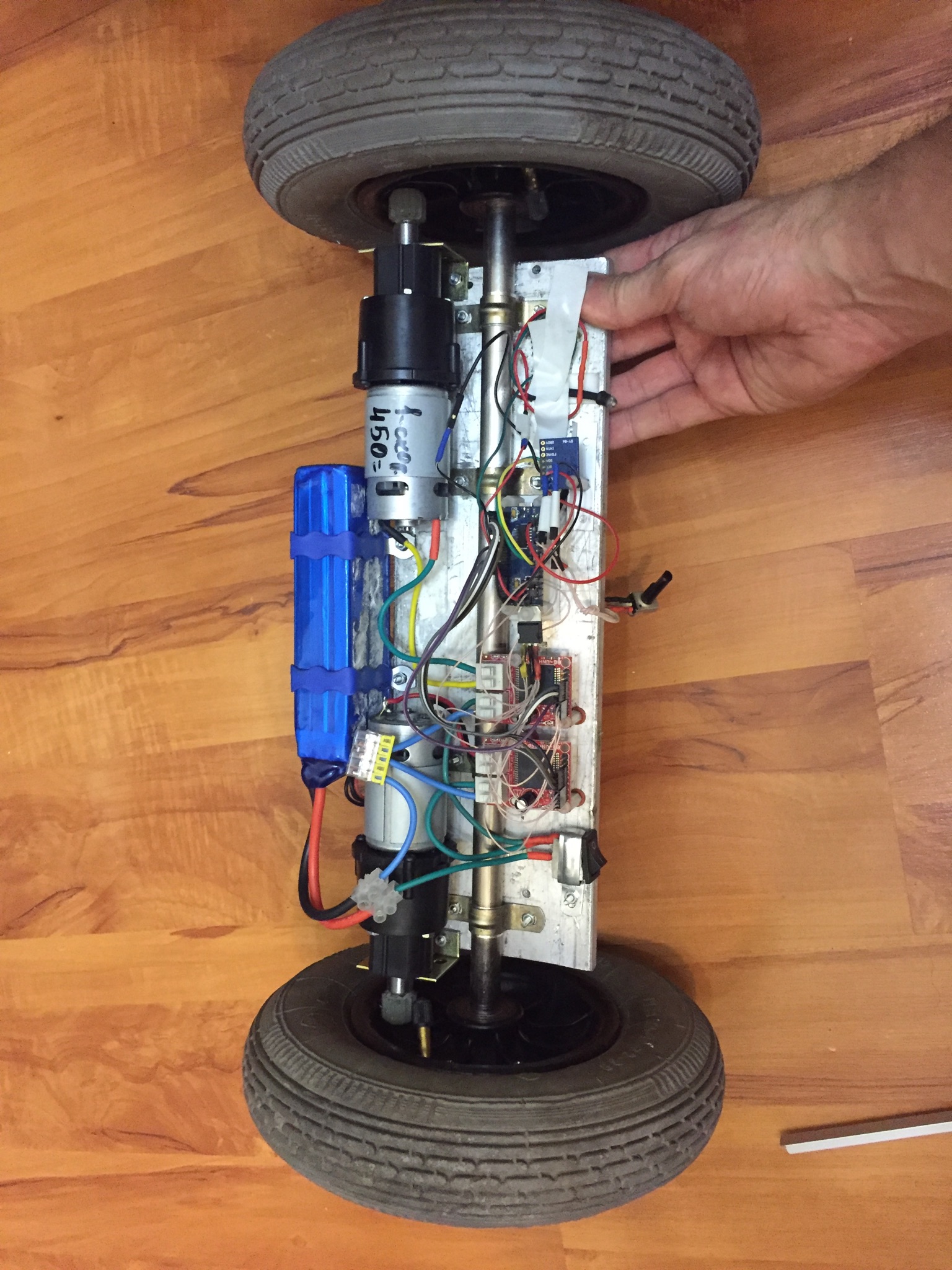
Недолго оттягивая, была сляпана платформа для испытаний:
Алюминиевая пластина толщина 12мм
Ось диаметром 14мм – направляющая от матричного принтера
Скобы строительные диаметр 14мм
Колеса – передние от инвалидной коляски (диаметр 8 дюймов, подшипники встроены).
Моторы и планетарные редукторы от шуруповертов на 18В
Шестерни передачи на колеса от электромясорубок
Аккумулятор 12В 5Ач Li-pol (остался после спада тренда квадракоптеростроения)
Датчик 10DOF MPU-6050 (остались после спада тренда квадракоптеростроения)
Уголки, болты и гайки
По доступности можно отметить, что п.1,3,4,5,6,11 были куплены на местном рынке.
Отдельно следует отметить, что моторы с редукторами мне продали, разобрав на моих изумленных глазах, рабочий шуруповерт (450р мотор, 500р редуктор с ограничителем момента). На мой вопрос это окупается? Мне продавец ответил, что половину закупочной цены данного шуруповерта уже отбил на продаже аккумулятора.
Были затруднения с приобретением драйверов моторов (до 30А). Был заказан двухканальный драйвер vnh2SP30 на eBay за 600р, но так как ждать не хотелось, уже через неделю были куплены два одноканальных драйвера vnh3SP30 в «Чип и Дип» в разных городах (Краснодар, Волгоград) благодаря поездке на море.
После прошивки и калибровки гироскопа все заработало практически без проблем. Пришлось перекинуть на одном драйвере сигналы управления, потому что колесо крутилось в ненужную сторону, и выяснилось, что шестерни на валах редукторов проскальзывают несмотря на клей.
С шестерней вопрос решил следующим образом: гравером с отрезным диском нанес насечки продольно оси вала глубиной 0,5мм и длинной равной ширине одеваемой шестерни. Надел шестерню и забил в насечки обрезки скрепки (типа микрошпонки). Следом проявилось новое слабое место – недостаточное прижимное усилие шестерни редуктора к шестерне колеса. Зная, что это всего лишь промежуточный прототип не стал решать проблему фундаментально, а просто стянул кабельной стяжкой оси колеса и вала редуктора. После 20 минут покатушек капроновая стяжка не нагрелась хотя вал редуктора в отличие от вала колеса подвижный.
Следует отметить, что передача «вал редуктора – колесо» имеет высокие требования к выдерживаемому моменту. Передаточное число здесь составило всего 5:1. Планетарный редуктор шуруповерта имел число 1:25. При напряжении 12В скорость передвижения на 8 дюймовом колесе была безопасной (от 5-8км/ч). Также остался запас по напряжению.
Важно! Драйверы vnh2 до 14В.
Управление поворотами было сделано вынесением потенциометра в руку.
В результате потраченных усилий, денег и времени было проверена работоспособность и достаточность мощности всего устройства и обоснованы дальнейшие вложения указанных ресурсов. Конечно, можно было бы, и рассчитать все заранее, исходя из требуемого момента на колесе, но разброс реальных параметров двигателей от шуруповертов и малый выбор среди тех продавцов, кто разберет для тебя два конкретных шуруповерта, делает это бессмысленным.
Вторая версия (гироскутер)
Усложнение конструкции до гироскутера неизбежно ведет к добавлению силовых узлов, привносящих вес, чего хотелось избежать, чтобы «не таскать велосипед на себе». Анализ весов комплектующих привел к выводу, что уменьшить вес можно только несущей пластины. И действительно пластина алюминия в 6мм (взамен 12мм) оказалась в полной мере удовлетворяющей ощущениям твердой основы под ногами (вес нагрузки около 80кг).
В связи с необходимостью установки подшипника в средний узел соосно с колесами потребовалось поднять ось колес от платформы, что вкупе с разделением полуосей приводит к возникновению крутящих моментов на полуоси (излом). Пришлось отказаться от слабых скоб, которые начали подымать лапки вверх.
Анализ доступных подшипников с наименьшей высотой привел к выбору игольчатых подшипников (цилиндрических с внутренним диаметром 17мм и внешним 23мм). Здесь стало ясно, что ось среднего узла будет по диаметру больше чем полуоси колес. Мне не посчастливилось найти ось точно под подшипник. Пришлось обратиться к токарю с целью проточить строительный болт до нужного диаметра и сделать проточки для стопорных колец (вместо колец, впоследствии, была использована вязальная проволока для арматуры). Стопорные кольца понадобились, т.к. у данного подшипника отсутствует внутренняя оправа и цилиндры катаются по поверхности оси (т.е. он не напрессовывается).
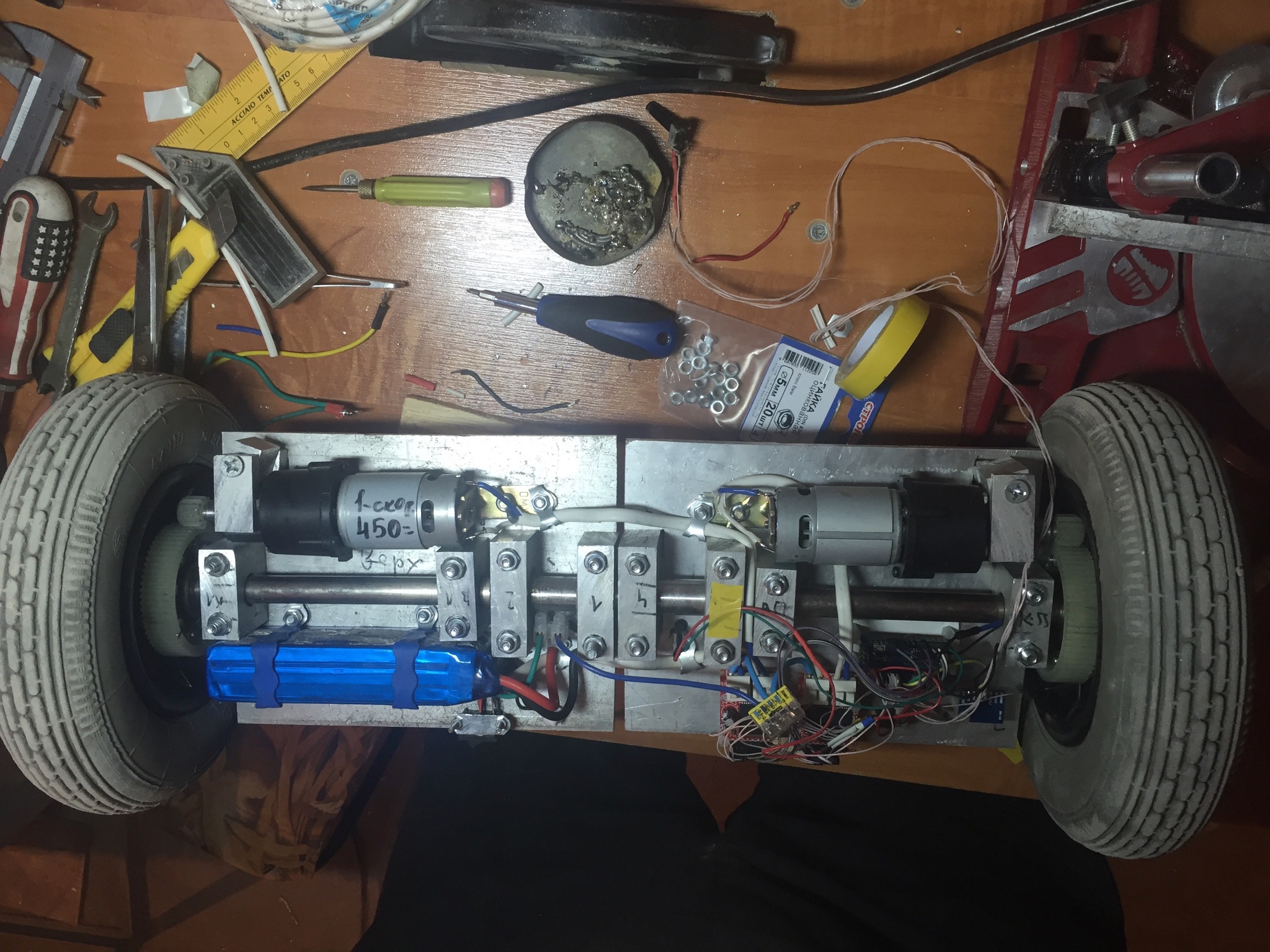
Далее осталось только придумать узлы крепления, обеспечивающие соосность трех осей (две полуоси колес и толстая ось среднего узла). Это требование необходимо выполнить, чтобы не было неприятного ощущения на стопах, что их поворачивают туда, куда не требуется.
Решение пришло само: зачем искать специфичные крепления, если можно сделать их самому. Была куплена пластина алюминия толщиной 16 мм, порезана торцовочной пилой (диском с отрицательным углом) на одинаковые прямоугольники и которые были просверлены ступенчатым сверлом до нужных диаметров. Требования к точности сверления высокие только для двух оправ с подшипниками. Остальные (6 шт.) могут иметь разумные допуски, тем более, что фиксация неподвижных осей в оправах выполняется расклиниванием оправ.
Силовые провода были взяты из гибкого провода для проводки 2х2,5мм. Часть проводки удалось выполнить без пайки на пружинных и винтовых клеммах, но полностью от пайки отказаться не удалось.
Угол разбега полуплатформ было решено определять потенциометром с применением механизма тяги. Подвижная средняя ось и ось потенциометра были сориентированы параллельно. В подвижную среднюю ось был вкручен тонкий винт с головкой типа «ушка иглы». Вылет винта использовался как рычаг. На потенциометр была одета ручка-крутилка также с удлиненным винтом с ушком. Ушки винтов были связаны подвижной тягой из проволоки.
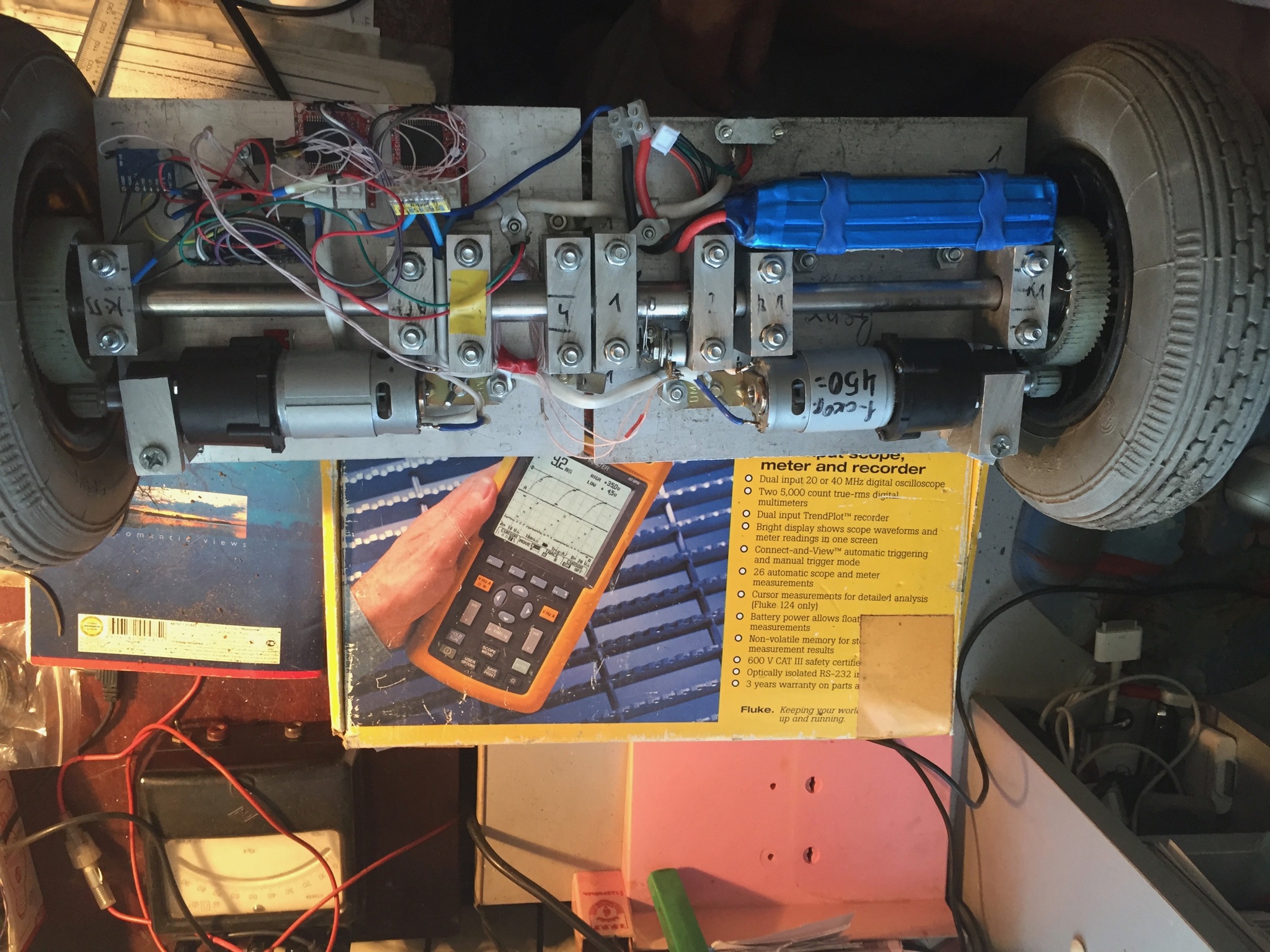 только самы зоркие найдут потенциометр с тягой
только самы зоркие найдут потенциометр с тягой
Очередное испытание показало, что одна полуплатформа оснащенная гироскопом, а вторая связана с первой через потенциометр дают ассиметричную реакцию при повороте вправо и влево. Грубо прикинув в уме, это стало вполне объяснимо. К примеру,
Поворот направо (Левая наклонена \; Правая ровно __)
Угол левой платформы с гироскопом +5 значит скорость на колесах: Л=5 П=5. Угол правой платформы с потенциометром -5 от первой (т.е. нога горизонтально ожидается поворот направо) скорость на колеса Л=5-(-5)=10; П=5+(-5)=0. Итог — поворот вокруг правого колеса.
Поворот налево (Левая __; Правая )
Угол левой платформы с гироскопом 0 (горизонатльно) значит скорость на колесах: Л=0 П=0. Угол правой платформы с потенциометром +5 от первой (ожидается поворот налево) скорость на колеса Л=0+(-5)=-5; П=5-(-5)=5. Итог – поворот на месте вокруг себя.
Версия три (два контроллера)
Не долго думая и оставаясь верным концепции не разбираться с ПО, было решено на каждую полуплатформу поставить свой гироскоп и контроллер (благо этого добра у меня осталось достаточно).
Таким образом, каждый Arduino реально управляет только одним колесом по показаниям своего гироскопа. Потенциометры заменились в ПО обнулением переменной после нормирования результатов вызова analogRead (с контакта потенциометра), т.к. руль больше не нужен.
Также потребовалось немного успокоить ПИД регулятор уменьшением Кп.
Более адекватная версия испытывалась дольше, принося неописуемую радость детям, и выявила рецидивы в креплении шестерни к валу редуктора. Пришлось отказаться от «микрошпонок» и просверлить насквозь капроновую шестерню (в нерабочей области) и вал для установки штифта. После недели активного использования за такое решение жалеть не пришлось.
Данная версия работает наиболее адекватно, но включение активности, которое происходит после выравнивания полуплатформ (захват горизонта после 3 секунд), происходит независимо. Т.е. если первая полуплатформа после включения была выравнена раньше, то и активизируется балансер раньше. Это практически не заметно, но вытекает логически из ПО.
 Искренняя радость. фотографа.
Искренняя радость. фотографа.
По результатам испытания функциональности на детях было решено одеть это все в корпус, что бы скрыть от непосвященных пользователей секреты электромеханической магии.
Лучше всего для корпуса подошел плоский ПВХ (204мм) воздуховод. Белый цвет выглядел не кошерно, в итоге транспортное средство было обклеено пленкой черного цвета под углеволокно. Вес всего устройства, благодаря пластиковым ободам колес, составил около 5 кг. В таком виде и было передано в пользование.
Фотки с корпусом, к сожалению, не осталось.
Собственные наблюдения, не стоит гнаться за скоростью реакции следования гиро за отклонением тела. Для человека это не свойственно, он сам регулирует равновесие. Чем медленнее реакция гиро (разгон 1,5-3 сек до максимальной скорости — оптимально) тем комфортнее наезднику. Для хорошей работы регулятору важнее не столько вес, а сколько рост пассажира (по сути это перевернутый маятник). Для моей конфигурации дети оказались по разные стороны критической границы роста — 135см…125см.
Принципиальное различие с промышленными гиро – это шум моторов и редукторов. Этот вопрос еще буду изучать, но учитывая, что все создано вокруг «планетарок» шуруповертов перспектива не светлая.
Статья написана 5 лет назад. Теперь уже гироскутерами никого не удивишь.
Вот что осталось на текущий момент от поделки.
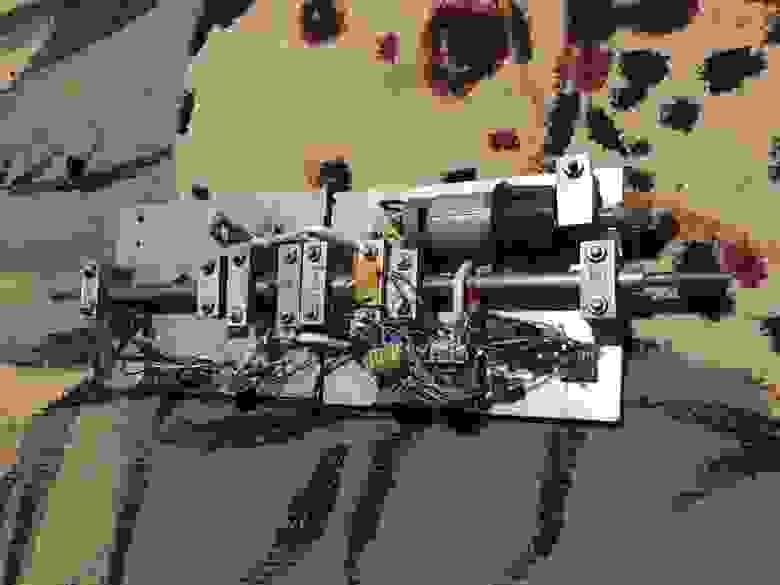
. и бесценный опыт мотивации «встать с дивана»!
Источник