- Сборка гироскутера своими руками в домашних условиях
- Как устроен гироскутер
- Основные детали конструкции гироцикла
- Схема управления гироборда
- Сборка самодельного гироборда
- Как сделать гироскутер своими руками в домашних условиях?
- Что такое гироскутер?
- Что же нам понадобится?
- Производство и процесс
- Настройка датчиков
Сборка гироскутера своими руками в домашних условиях
Появление средств передвижения на электротяге, снабженных электронным управлением, сразу же сделало их популярными. Сегвеи и гироскутеры выглядели настолько привлекательно, что сразу же появились желающие попробовать сделать гироскутер своими руками.
Понятно, что электротранспорт, изготовленный в домашних условиях, внешне отличается от заводских изделий, однако, при его создании используются технологии, практически идентичные тем, что применяются для изготовления гироциклов в массовом производстве.
Как устроен гироскутер
Разобравшись в предназначении каждого из элементов комплекта оборудования, заключенного внутри корпуса, можно начинать работу над созданием гироскутера собственного производства. Любой из видов гиробордов является самобалансирующимся средством передвижения.
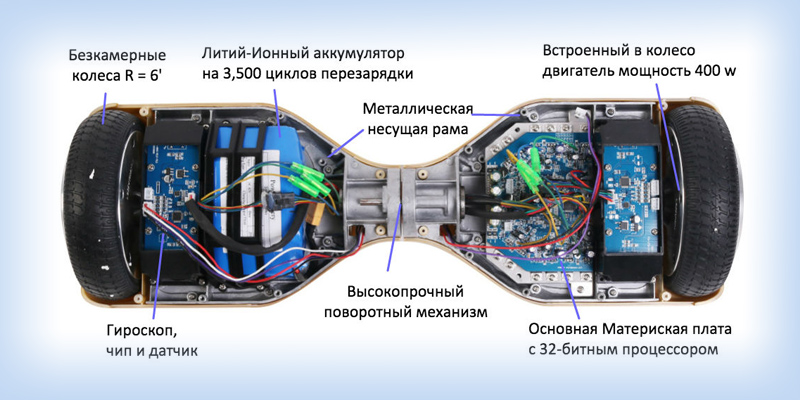
При его работе используется система гироскопических датчиков и технология, обеспечивающая баланс платформы. Одновременно с включением гироцикла приходит в действие система балансировки. В момент, когда водитель занимает свое место на платформе, она начинает менять положение, что считывается гироскопическими датчиками.
Полученная информация направляется на вспомогательные платы, размещенные по обе стороны платформы. Данные платы перерабатывают полученную информацию и отправляют ее в материнскую плату, где установлен микропроцессор. Материнская плата выполняет программу самобалансирования.
На практике происходят следующие действия:
- при наклоне платформы на несколько градусов вперед, двигатели получают сигнал на движение в обратном направлении до момента ее выравнивания. При наклоне в другую сторону запускается такой же процесс;
- на наклон платформы на больший градус, программа устройства отвечает командой электродвигателю на начало движения в направлении, обозначенном положением площадки;
- отключение двигателей и самого гироскутера происходит при отклонении платформы относительно горизонтали на угол более 45°.
Основные детали конструкции гироцикла
Перед тем, как сделать гироскутер в домашних условиях, потребуется подобрать комплект деталей, необходимых для сборки транспортного средства. Для этого потребуются:
- прочная основа, на которой будет закреплена электронная часть устройства;
- два электродвигателя, обладающие мощностью, достаточной для передвижения человека весом до 100 кг;
- материнская плата с процессором, дополненная двумя платами с гироскопическими датчиками;
- аккумуляторная батарея;
- два колеса одинакового диаметра.
Начнем с выбора электродвигателя. Он должен быть не менее 350 Вт, тогда суммарная мощность двух двигателей будет достаточной для перемещения веса взрослого человека. Для работы электродвигателей потребуется аккумулятор, способный без дополнительной зарядки обеспечивать подачу необходимой электроэнергии не менее часа. Поэтому его номинальная мощность выбирается не менее 4400 мА/ч.
К выбору колес следует подходить серьезно. У них должны быть прочные шины, а поскольку самодельный гироскутер будет иметь корпус больше и массивнее заводского, то необходимо обеспечить достаточное расстояние платформы от земли. Диаметр колеса должен быть не менее 10-12 дюймов.

Схема управления гироборда
Существует множество вариантов схем управления гироциклами, разработанных производителями устройств. Представлены и разработки любителей. Большинство «самоделкиных» для создания схемы управления транспортным средством используют микроконтроллеры Arduino, широко представленные на рынке.
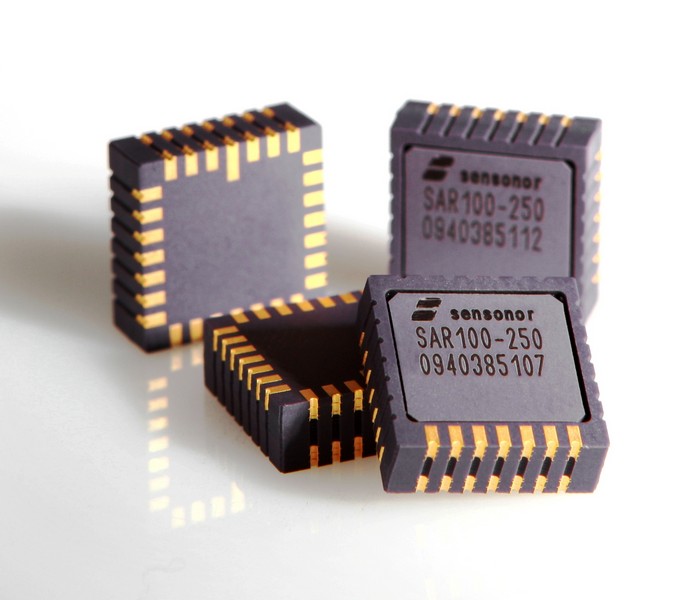
Лучшим решением является UnoNano, а дополнительным чипом для обработки информации становится ATmega 328. Потребуется также два гироскопических датчика типа InvenSense MPU 6050. Их располагают на дополнительных платах, осуществляющих первичную обработку данных о положении платформы. В схему управления входят также датчики балансировки и датчики поворотов.
Сборка самодельного гироборда
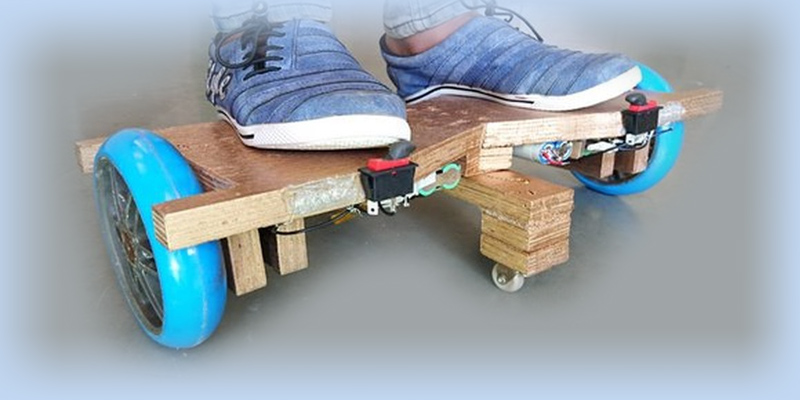
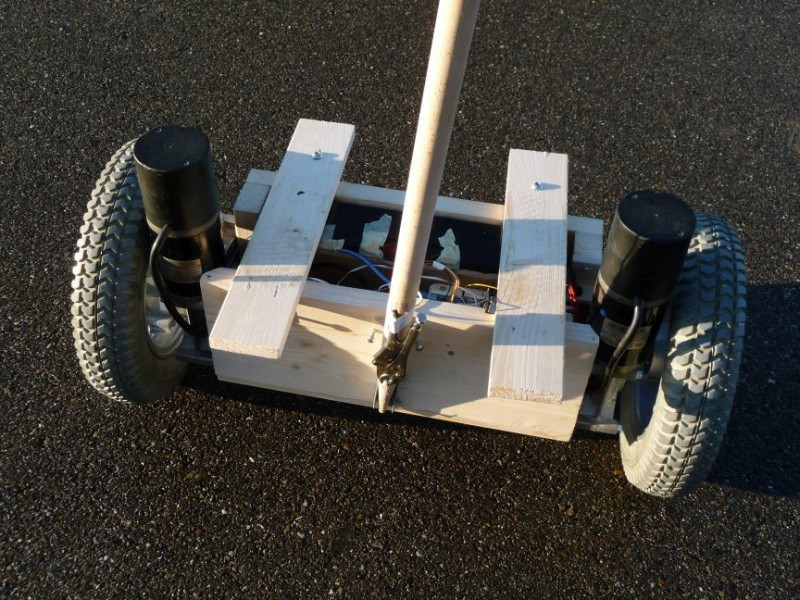
Наиболее часто для изготовления корпуса создатели самодельного электротранспорта используют бруски и толстую фанеру. Основной причиной выбора деревянной конструкции корпуса становится его изоляционные свойства и легкость изготовления. Размеры корпуса выбираются таким образом, чтобы в нем удобно располагались все детали устройства.
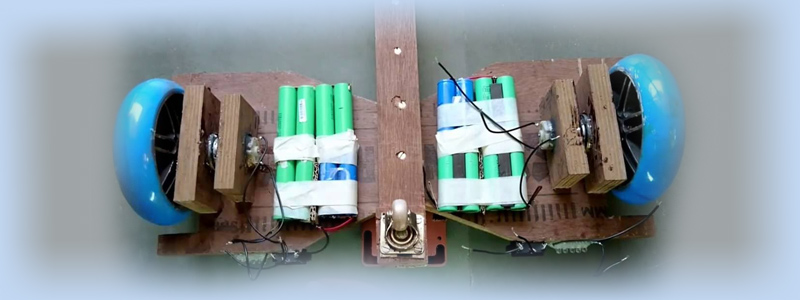
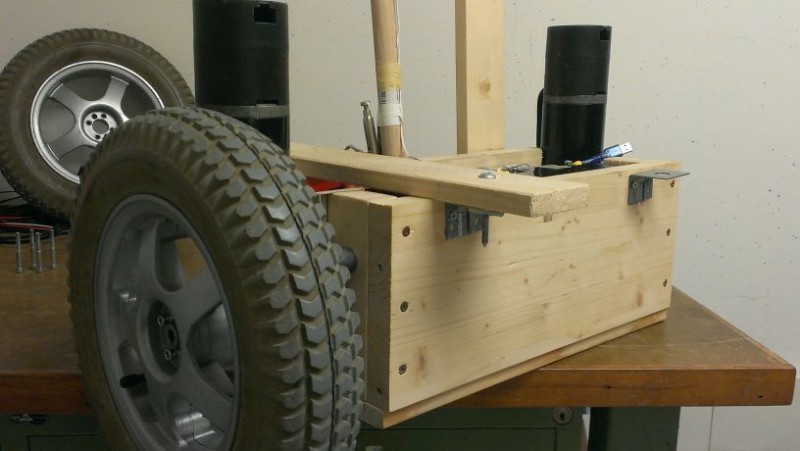
В первую очередь по бокам платформы монтируются двигатели, к которым зубчатой передачей присоединяются колеса. Для установки аккумулятора, заключенного в специальную коробку, выбирается место строго посередине коробки корпуса. Двигатели крепятся болтами, а для закрепления аккумуляторной коробки можно использовать саморезы.
В конструкцию самодельного устройства входит рулевой столб, на котором устанавливается кнопка готовности, нажатие которой будет служить командой поступления питания на двигатели. При её отжимании отключатся двигатели и сам гироскутер. С ее помощью будет обеспечена безопасность езды водителя.
При выполнении наладки микроконтроллера лучше воспользоваться услугами друзей, умеющих устанавливать программу Arduino Terminal и регулировать необходимые параметры.
Источник
Как сделать гироскутер своими руками в домашних условиях?
Если вы думаете, что гироскутер или мини-сигвей невозможно сделать дома своими руками и силами, то вы далеко заблуждаетесь. Как ни странно, в интернете есть много видео, где многие умельцы делают именно свой гироскутер. У некоторых он получается очень самодельный, но есть и те, кто смог по настоящему приблизиться к самой технологии создания и воспроизвести по настоящему интересную и качественную вещь. Так можно ли сделать гироскутер своими руками? Нам расскажет об этом Adrian Kundert — инженер и просто хороший человек.
Что такое гироскутер?
Как сделать гироскутер своими руками? Для того, чтобы понять как сделать самодельный гироскутер, нужно для начала понять — что такое гироскутер, из чего он состоит и что нужно для создания этого интересного средства передвижения. Гироскутер — это самосбалансированное средство передвижения, принцип работы которого стоит на системе гироскопических датчиков и внутренней технологии удержания баланса рабочей платформы. То есть когда мы включаем гироскутер, включается и система балансировки. Когда человек встает на гироскутер, начинается меняться положение платформы, эта информация считывается как раз гироскопическими датчиками.
Эти датчики считывают любое изменение положения относительно земной поверхности или точки от которой идет гравитационное воздействие. После считывания, информация подается на вспомогательные платы, которые находятся по обе стороны платформы. Так как датчики и сами электродвигатели работают независимо друг от друга, то в дальнейшем нам понадобятся два электродвигателя. От вспомогательных плат, информация в обработанном виде уже идет в материнскую плату с микропроцессором. Там уже с необходимой точностью выполняется программа удержания баланса.
То есть если платформа наклоняется вперед, примерно на несколько градусов, то двигателям подается сигнал на движение в обратное направление и платформа выравнивается. Также выполняется и наклон в другую сторону. Если же гироскутер наклоняется на больший градус, то программа сразу же понимает, что идет команда о движении вперед или назад электродвигателям. Если гироскутер наклоняется больше чем на 45 градусов, то двигатели и сам гироскутер отключается.
Гироскутер состоит, из корпуса, стальной или металлической основы, на который и будет крепится вся электроника. Дальше идет два электродвигателя с той мощностью, чтобы была возможность ездить под весом человека до 80-90кг. Дальше идет материнская плата с процессором и две вспомогательные платы, на которых как раз и стоят гироскопические датчики. И конечно же аккумулятор и два колеса с одинаковым диаметром. Как сделать гироскутер? Для решения этого вопроса, нам понадобится добыть определенные детали конструкции самого гироборда.

Двигатели с колесами
Что же нам понадобится?
Как сделать гироскутер своими руками? Первое и основное что понадобится, это два электрических двигателя, с мощностью способных перевозить вес взрослого человека. Средняя мощность у заводских моделей составляет 350 Ватт, поэтому постараемся найти двигатели такой мощности.
Дальше конечно же нужно найти два одинаковых колеса, примерно 10-12 дюймов. Лучше побольше, так как электроники у нас будет много. Чтобы проходимость была выше и расстояние между платформой и землей было на нужном уровне.
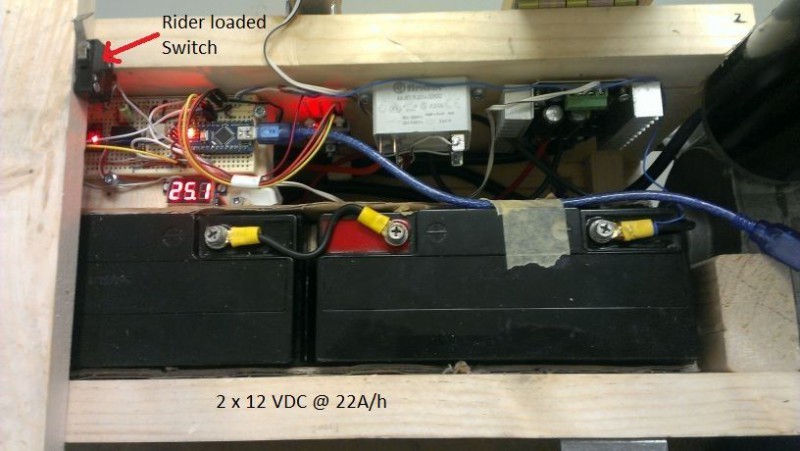
Два аккумулятора, свинцово-кислотных, нужно выбрать номинальную мощность как минимум 4400 мА/ч, а лучше больше. Так как мы будем делать не металлическую конструкцию, но она будет весить больше чем оригинальный мини-сигвей или гироскутер.
Производство и процесс
Как сделать гироскутер, мощный и чтобы он сам держал баланс при езде? Сначала нужно построить план, какое именно средство передвижения нам понадобится. Нам нужно сделать довольно мощное средство передвижения с большими колесами и большой проходимостью по разным дорогам. Минимальное значение беспрерывной езды должно составлять 1-1.5 часа. Мы потратим примерно около 500 евро. Поставим беспроводную систему управления нашему гироскутеру. Поставим считывающее устройство неполадок и ошибок, вся информация будет идти на SD-карту.
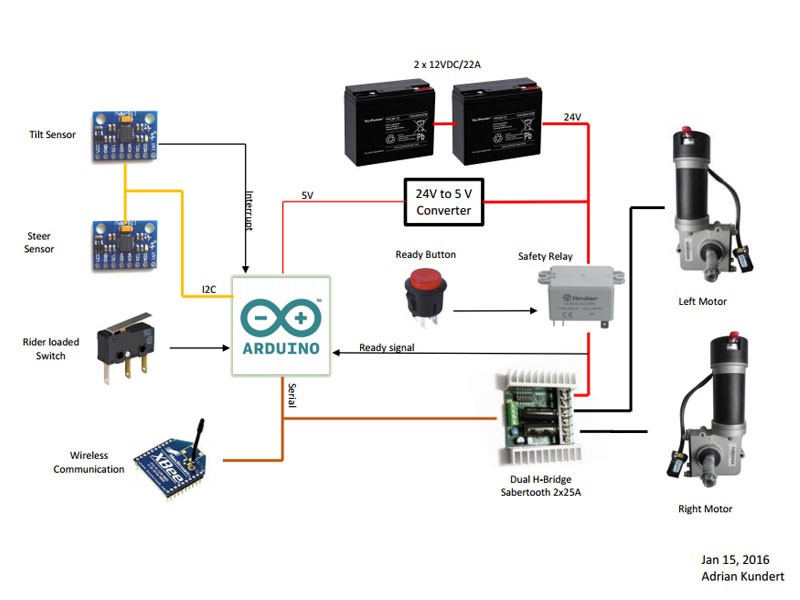
На схеме выше можно все четко увидеть: электродвигатели, аккумуляторы и прочее. Для начала нужно выбрать именно тот микроконтроллер, который и будет осуществлять управление. Из всех представленных на рынке микроконтроллеров Arduino мы с вами выберем UnoNano, и в качестве дополнительного чипа обработки информации будет выступать ATmega 328.
Но как сделать гироскутер безопасным? Два аккумулятора у нас будут подсоединены последовательно, так мы получим нужное напряжение. Для электродвигателей, как раз и понадобится сдвоенная мостовая схема. Будет поставлена кнопка готовности, по нажатию которой и будет поступать питание на двигатели. При отжимании этой кнопки, двигатели и сам гироскутер будет отключаться. Нужно это для осуществления безопасной езда самого водителя и нашего средства передвижения.
Микроконтроллер Arduino будет на скорости около 38400 БОД, использовать последовательную связь со схемой XBee. Мы будем использовать два гироскопических датчика InvenSense MPU 6050 на базе модулей GY-521. Они в свою очередь будут считывать информацию о положении платформы. Эти датчики достаточно точны для того, чтобы сделать мини-сигвей. Эти датчики будут расположены на двух дополнительных вспомогательных платах, которые будут осуществлять первичную обработку.

Мы будем использовать шину I2C, она имеет достаточную пропускную способность, чтобы быстро связывать с микроконтроллером Arduino. Гироскопический датчик имеющий адрес 0x68 имеет частоту обновления информации раз в 15 мс. Второй же датчик адресов 0x68 работает напрямую от микроконтроллера. У нас так же есть выключатель нагрузки, он переводит гироскутер в режим удержания баланса, тогда когда платформа находится в ровном положении. В этом режиме гироскутер остается на месте.

Три деревянные детали, на которых и будет располагаться наши колеса и электродвигатели. Рулевой столб, сделан из обычной деревянной палки он будет крепиться к передней части самого гироскутера. Тут можно взять любую палку, даже черенок от швабры. Нужно обязательно учесть тот факт, что аккумуляторы и другие схемы, будут производить давление на платформу и тем самым балансировка будет немного перенастроена, именно в ту часть, где будет больше давление.
Устанавливка гироскопического датчика
Двигатели же нужно равномерно распределить справа и слева по бокам платформы, а аккумулятор максимально посередине в специальной коробке. Крепим рулевой столб на обычные финты и присоединяем кнопку готовности к верхней части палки. То есть если что-то пошло не так и кнопка отжата, то гироскутер будет выключаться. В дальнейшем эту кнопку можно переделать в подножную часть или настроить на определенный наклон самой платформы, но мы пока делать этого не будем. Закажите доработку сайтов вордпресс здесь.
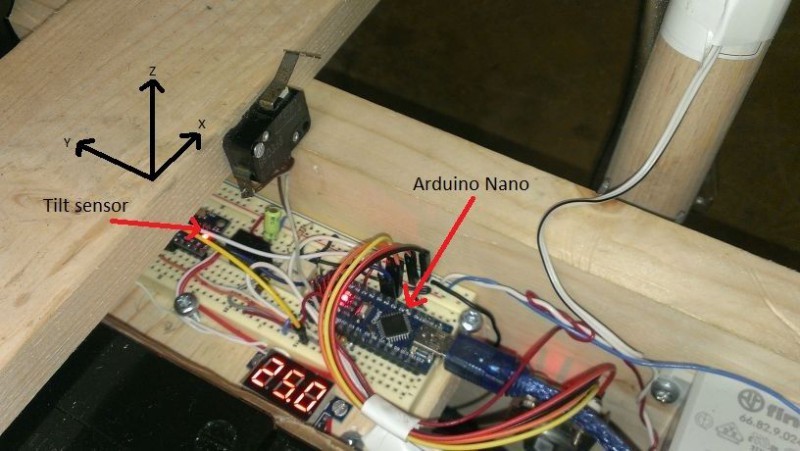
Устанавливаем на плату микроконтроллер
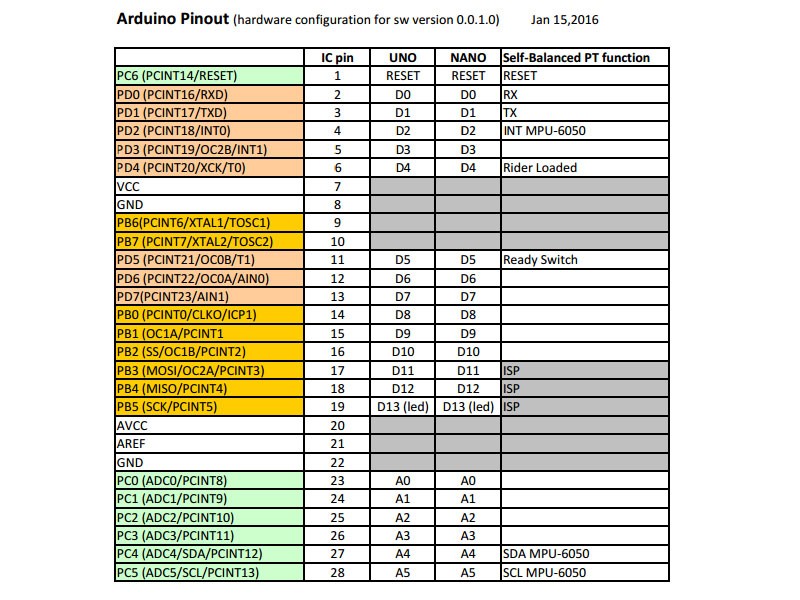
Внутренняя схема и спайка всех проводов, производится по той же схеме. Дальше нужно подключить два гироскопических датчика к нашему микроконтроллеру, по мостовой схеме с двигателем, по данной таблице.
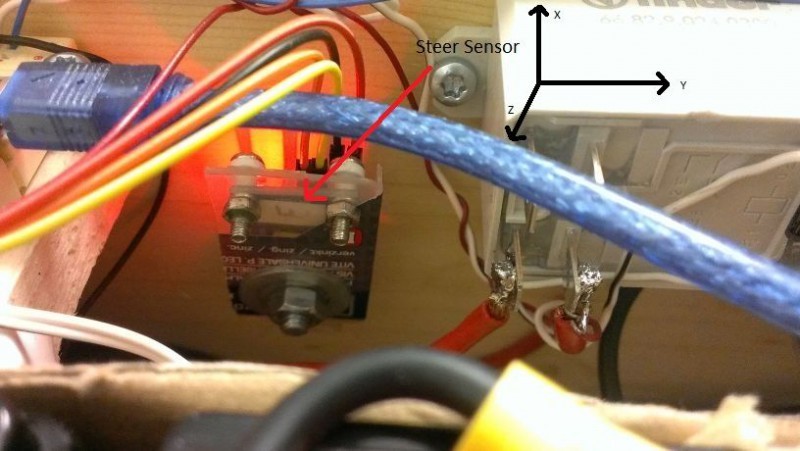
Датчики балансировки должны быть установлены параллельно земле или вдоль самой платформы, а вот датчики поворота направо и налево должны быть установлены перпендикулярно гироскопическим датчикам.

Настройка датчиков
Дальше производим настройку микроконтроллера, загружаем исходный код. Дальше нужно проверить правильную взаимосвязь между гироскопическими датчиками и датчиками поворотов. Используйте программу Arduino Terminal по программированию и настройке гироскутера. Обязательно нужно настроить ПИД регулятор баланса. Дело в том, что вы можете выбрать двигатели с другой мощностью и характеристиками, для них настройка будет другой.
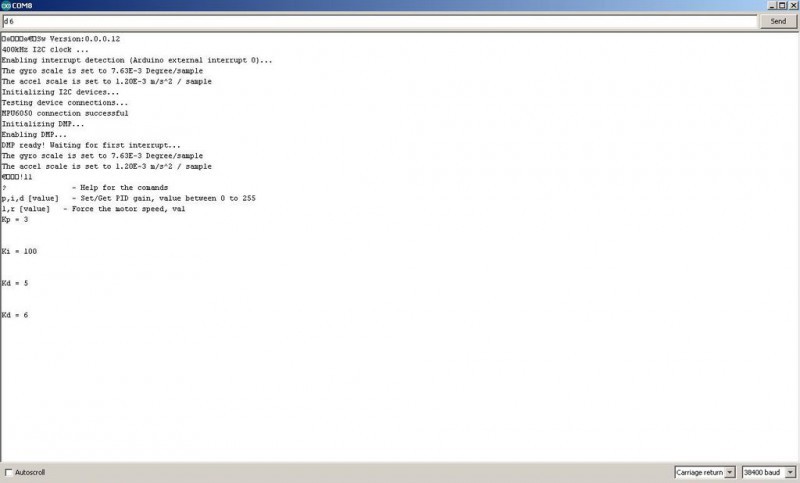
Программа Arduino Terminal
Есть несколько параметров в этой программе. Первый самый главный параметр, это параметр Kp, он отвечает за балансировку. Сначала увеличьте этот показатель, для того чтобы ввести гироскутер в нестабильный вид, а потом уменьшайте показатель до нужного параметра.
Следующий параметр, это параметр Ki он отвечает за ускорение гироскутера. При снижении угла наклона скорость уменьшает или увеличивается при обратном действии. и последний параметр, это параметр Kd, он возвращает саму платформу в ровное положение , а двигатели приводит в режим удержания. В этом режиме гироскутер просто стоит на месте.
Дальше вы включаете кнопку включения микроконтроллера Arduino и гироскутер переходит в режим ожидания. После того как вы встали на сам гироборд, вы встаете ногами на нажимную кнопку, так гироскутер переходит в режим «на месте». Включаются датчики балансировки и при изменении угла наклона, гироскутер едет вперед или назад. При каких либо поломках, можно без проблем осуществить ремонт гироскутера своими руками.
Источник