- Электронный компас своими руками
- Магнитный компас для картплоттера (Просматривают: 2)
- KingIII
- Как собрать электронный компас, направляющий вас к ближайшей пиццерии
- Как сделать электронный компас на датчике MPU-9250 и Arduino
- 1 Подключение датчика MPU-9250к Arduino
- 2 Подключение 7-сегментного светодиодногоиндикатора к Arduino
- 3 Подключение динамика / пьезоизлучателяк Arduino
- 4 Собираем всё вместе:компас на Arduino
Электронный компас своими руками
Компас – гениальное изобретение человечества, позволившее вывести ориентацию на местности на новый уровень. А современные технологии, позволяют в свою очередь вывести на новый уровень сам компас.
На текущий момент производители предлагают достаточное количество различных датчиков, которые можно использовать в своих устройствах, все они имеют свои особенности (точность измерения, интерфейс обмена данными, питание и т.п.). Ниже мы остановимся только на одном из чипов, который доступен по цене и совместим с программируемыми микросхемами.
Микросхема представляет собой магнитометр, позволяющий позиционировать направление по трем осям (x, y, z). Может использоваться в портативной электронике (имеет небольшие размеры), но радиолюбители могут внедрять его в состав радиоуправляемых моделей, в роботов и другую технику.
Рис. 1. Микросхема HMC5883L
Технология его изготовления — анизотропная магниторезистивная (AMR).
Взаимодействие с микроконтроллером осуществляется по протоколу I²C (он же IIC).
Для построения устройств, где используются прерывания (сигнал формируется магнитометром после изменения предыдущих показателей), имеется специальный вывод DRDY.
Специально для микросхем HMC5883L продаются готовые печатные платы с обвязкой (этот путь будет наиболее простым для проектов «на коленке» или для использования с программируемыми микроконтроллерами).
Один из вариантов выглядит так.
Рис. 2. Печатная плата с обвязкой
Модули могут поставляться для самостоятельной пайки или уже в готовом виде (с припаянной микросхемой).
Все что остается – подключить к Atmega, Arduino или другому микроконтроллеру, и «прошить» правильную логику работы.
Перед построением своих электронных компасов на HMC5883L стоит учесть, что датчик может проявлять чувствительность к электрическим полям, создаваемым бытовыми приборами, кабелями и т.п. Поэтому в процессе тестирования, калибровки и эксплуатации желательно обеспечить достаточное расстояние от всех потенциальных помех.
Реализация электронного компаса на Atmega8
Схема подключения датчика к АТмеге выглядит следующим образом.
Рис. 3. Схема подключения датчика
Информацию в числовом выражении угла относительно севера будет отображать небольшой LCD дисплей SC1602. За регулировку яркости последнего будет отвечать переменный резистор R2.
Микроконтроллер PCA9517 в схеме используется для согласования уровней (HMC5883L, как и говорилось выше, «понимает» IIC и питается напряжением 3,3 В, в то время как дисплей питается 5 В). Если вы приобрели готовый модуль с датчиком, на котором уже имеется встроенная система согласования уровней, то PCA9517 из схемы можно исключить.
Перед использованием устройство необходимо откалибровать. Для этого нажимается ключ S2 и датчик вращается на 360°.
В прошивке применяется дополнительный алгоритм для снижения погрешности измерения, который вычисляет среднеарифметическое число из min и max по осям. Поэтому истинность измерения при постоянном вращении существенно снижается. Обнулить регистры можно ключом S1.
Готовая прошивка и исходный листинг можно найти во вложениях (все функции детально прокомментированы, при необходимости программу можно изменить под свои нужды).
Расстановка фьюзов на скрине ниже.
Рис. 4. Расстановка фьюзов
Собрать схему для тестирования можно и на макетной плате, при желании можно аккуратно упаковать все в корпус.
Тестовый вариант электронного компаса в работе можно увидеть на фото ниже.
Рис. 5. Тестовый вариант электронного компаса в работе
Символ перед числами означает знак «минус» (то есть значение координат отрицательное).
Дисплей показывает только значения координат (слева-направо – x,y,z). Сверху – вычисленный угол относительно сервера.
Реализация электронного компаса на Arduino UNO
В случае с Arduino все гораздо проще. Готовый модуль подключается к основной плате напрямую (смотри схему ниже).
Рис. 6. Схема подключения модуля к плате
На примере выше питание подается с контакта 3,3 В, если у вас модуль с согласованием уровней, то подключение следует производит к питанию 5 В.
Для программы использовалась готовая библиотека с GitHub (скачать актуальную версию можно здесь https://github.com/bildr-org/HMC5883L). Во вложении эта библиотека тоже есть.
В данной связке отображения результатов на встроенном дисплее не предусмотрено. Получить данные угла относительно севера (0- север, 180 – юг) можно с COM-порта.
Вот вывод с тестового устройства.
Рис. 7. Вывод с тестового устройства
Датчик показывает правильные результаты только в горизонтальном положении.
Пошивка и исходники находятся здесь.
Мнения читателей
Нет комментариев. Ваш комментарий будет первый.
Вы можете оставить свой комментарий, мнение или вопрос по приведенному выше материалу:
Источник
Магнитный компас для картплоттера (Просматривают: 2)



KingIII
Подключение внешнего GPS + компаса по протоколу НМЕА0183 к эхолоту Elite 7TI. По следам NIKO77.
Напишу вкратце, что получилось. Подробнее с картинками позже.
Компоненты:
1. Arduino Nano 3.0 — микроконтроллер на безе ATMEGA328P
2. Ublox NEO M8N — GPS+компас
3. LM2596S DC-DC 1.5В-35В — регулируемый преобразователь питания.
4. RS485 Board (3.3V) — плата интерфейса для подключения к RS422 эхолота.
5. GY-282 HMC5983 — отдельная плата компаса.
Все устройства запитываются напряжением 3.3В. GPS Ublox-а сразу имеет выход НМЕА0183, что удобно, по сути нужно просто считывать НМЕА посылки и транслировать их на выход Ардуино без какой либо обработки. Это примитивнейшая программа, кто мало-мальски знаком с программированием сделают без проблем.
Компас подключается по интерфейсу I2C. У меня компас в Ублоксе не заработал, купил отдельную плату компаса (п.5), с ней проблем не возникло. В нашем случае данные компаса нужно приводить к посылкам НМЕА. Примеры в интернете есть.
Что касается моего вопроса по поводу настроек эхолота что бы он увидел внешние данные. Спасибо всем, кто объяснил как должно было быть!
И сам убедился, в том, что если на входе эхолота на входах Rx+ и Rx- есть правильные НМЕА посылки, то в списке устройств появляется устройство NMEA0183 Port 1 (естественно при правильных уровнях сигналов), можно посмотреть какие данные устройство получает (список параметров).
У меня был косяк в том, что на преобразователь RS485 Board (3.3V) по ошибке подали напряжение 2В (не туда запаялись на Ардуинке), уровень сигнала был недостаточным, по этому эхо не видел данные. После правильного подключения эхолот сразу все увидел. Проверил на скоростях передачи данных 9600, 19200 и 38400.
На данный момент эхолот видит внешние спутники, всего 12шт. Как я понял это максимум для него или отображает лишь 12, хотя всего Ублокс ловит дома порядка 16-18 спутников. Родной GPS ловит 9 спутников. На родном GPS скачки по 20-30-40 метров в стороны, на внешнем точность позиционирования намного выше.
Данные компаса тоже видит, но пока всё по отдельности (GPS и компас). Нужно замекшировать в Ардуине данные спутников и данные компаса и выдавать в эхолот.
Еще такой момент, при выборе источника GPS данных предлагается выбор на все данные, т.е. нельзя сделать так, что данные GPS берутся с внутреннего источника, а данные компаса с внешнего источника. По этому просто компас по НМЕА0183 не прикрутить. Т.е. прикрутить-то можно, но будет либо родной GPS без компаса, либо внешний компас, но без GPS. Пока всё.
Источник
Как собрать электронный компас, направляющий вас к ближайшей пиццерии

Обычный компас показывает направление на магнитный северный полюс, и если вам нужно что-то найти, вы должны сначала сориентироваться на местности и понять, где и в какой стороне находится искомое относительно сторон света.
В фильме «Пираты Карибского моря» у капитана Джека Воробья был волшебный компас, показывающий в сторону того, чего его обладатель желает больше всего, что уже гораздо удобнее.
А электронщик-любитель Джо Гранд за неимением магии решил сделать компас, который показывает сразу в сторону того, что нужно – в его случае, в сторону ближайшей пиццерии. Проект Pizza Compass сделан на основе одноплатного компьютера для хобби и обучения Particle Boron.
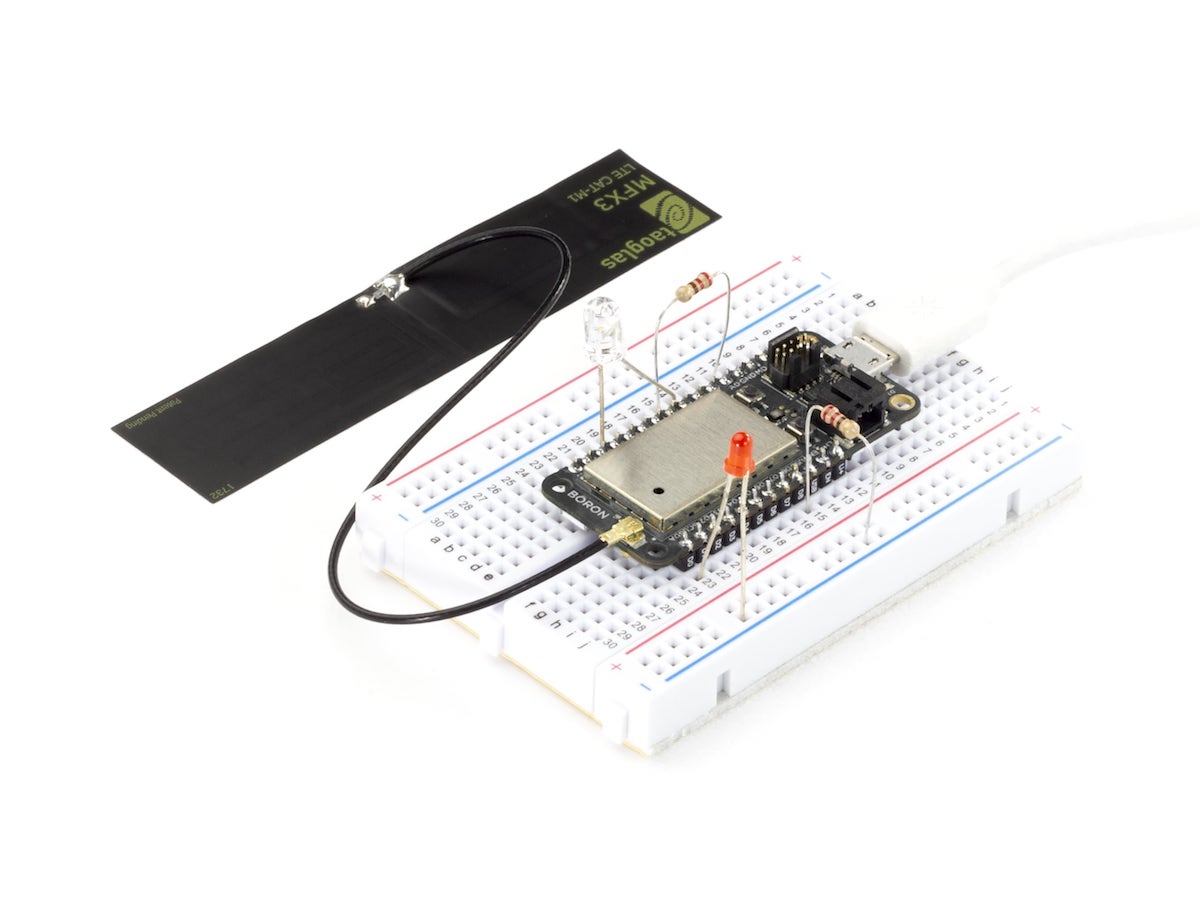
Одноплатный компьютер Particle Boron
Кроме одноплатника в устройстве присутствует GPS-модуль GlobalTop PA6H, электронный компас LSM303DLHC и восемь полноцветных светодиодов, расположенных вокруг изображения компаса. Питается всё от литий-полимерного аккумулятора.
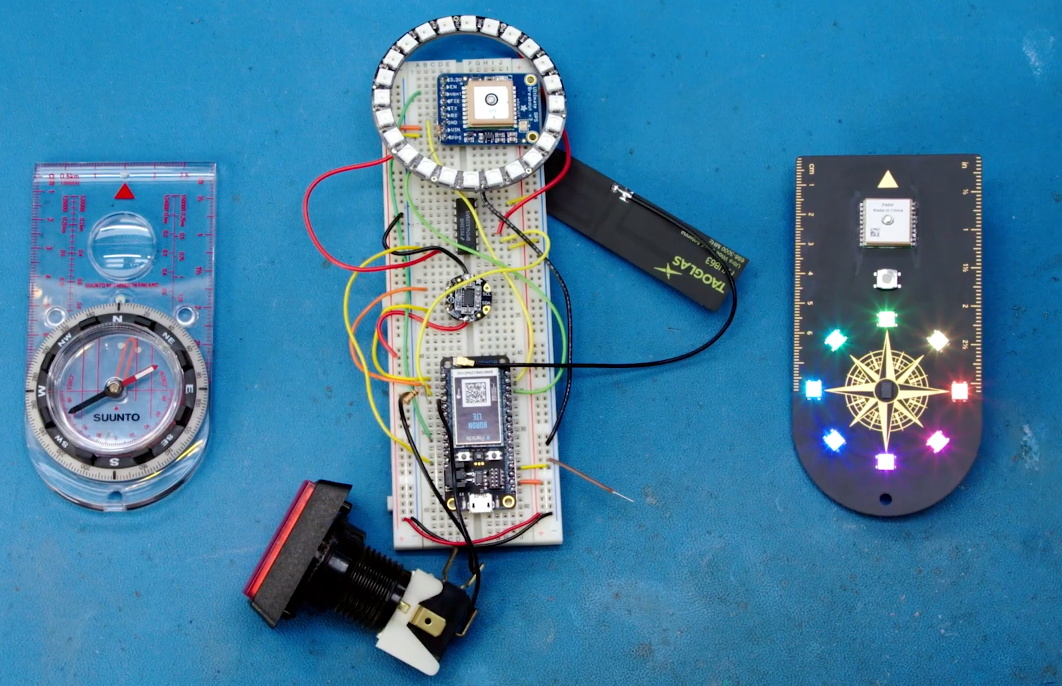
От прототипа до конечного продукта
Пользоваться устройством так же просто, как обычным компасом – нужно нажать на кнопку включения, и идти так, чтобы всегда горел верхний светодиод. Компьютер считывает координаты ближайшей пиццерии через Google Maps Places API., и сравнивает их с местоположением пользователя по GPS. Поскольку компас указывает напрямую на конечную точку, не учитывая, в отличие от навигаторов, конфигурацию улиц и наличие зданий, пользователю придётся заняться навигацией – прямо как с обычным компасом.

Управляющие программы, работающие на компьютере: Particle-NeoPixel для управления светодиодами, lsm303-arduino для интеграции компаса, TinyGPS++ для обработки сигналов GPS и расчёта расстояний. Для работы с Google Maps Places API используются. webhooks.
Поскольку проект изначально делался открытым, если вам не нравится пицца, вы можете переделать компас так, чтобы он указывал именно на то, что вам хочется – почти как у Джека Воробья. Извините – капитана Джека Воробья.
Источник
Как сделать электронный компас на датчике MPU-9250 и Arduino
Разобьём всю задачу на более мелкие подзадачи. Так сказать, проведём декомпозицию. И по шагам опишем весь процесс создания электронного компаса. Для проекта нам понадобятся:
- многофункциональный датчик MPU-9250;
- 3-разрядный 7-сегментный индикатор 3361AS;
- драйвер CD4511 для управления индикатором;
- 7 резисторов по 220 Ом (рекомендую набор резисторов с номиналами от 10 Ом до 1 МОм);
- пьезоизлучатель;
- Arduino UNO или иная совместимая плата;
- соединительные провода (например, вот такой набор);
- макетная плата;
- персональный компьютер со средой разработки Arduino IDE.
1 Подключение датчика MPU-9250к Arduino
Датчик MPU-9250 – это по сути несколько датчиков, расположенных на одном чипе. Так, он реализует функции 3-осевого гироскопа, 3-осевого акселерометра и 3-осевого магнитометра. В данном проекте мы будем использовать только магнитометр. Остальные датчики можно отключить в целях уменьшения потребляемого тока, т.к. будем делать портативное устройство, питающееся от батареи «Крона».
 Внешний вид модуля с датчиком MPU-9250
Внешний вид модуля с датчиком MPU-9250
Модуль имеет 10 выводов. Вот их назначение:
| Вывод | Назначение вывода модуля с MPU-9250 (MPU-9255) |
|---|---|
| VCC | Внешнее питание 3.3 В. |
| GND | Общий. |
| SCL | Линия тактовых импульсов I2C и SPI. |
| SDA | Линия данных для I2C или SPI. |
| EDA | Линия данных при подключении внешних датчиков по шине I2C. |
| ECL | Линия тактов при подключении внешних датчиков по шине I2C. |
| AD0 | Для выставления адреса I2C в режиме I2C. В режиме SPI это линия данных от датчика. |
| INT | Линия прерываний. Срабатывание настраивается при конфигурировании датчика MPU-9250. |
| NCS | В режиме SPI – линия выбора ведомого (chip select). В режиме I2C не соединяется ни с чем. |
| FSYNC | Зависит от конфигурации. |
Прежде чем подключать датчик MPU-9250 к Arduino, проверим его работоспособность с помощью моей любимой платы с микросхемой FT2232H. Для самого простого теста прочитаем содержимое регистра датчика, в котором содержится постоянное значение. Таким регистром может служить, например, регистр, в котором хранится идентификатор магнитометра, равный 0x48. Подключаться будем по интерфейсу I2C (для сокращения числа проводников). Как и большинство датчиков, MPU-9250 является ведомым на I2C шине. Схема подключения предельно проста: питание +3.3 В подаётся на вывод VCC, земля – GND, тактовая частота приходит на вывод SCL с ножки ADBUS0 микросхемы FT2232, линия данных SDA подключается одновременно к выводам ADBUS1 и ADBUS2 микросхемы FT2232.
 Подключение датчика MPU-9250 по I2C в качестве ведомого к микросхеме FT2232H
Подключение датчика MPU-9250 по I2C в качестве ведомого к микросхеме FT2232H
Теперь, когда всё подключено, запускаем в режиме I2C программу SPI via FTDI, многократно описанную нами ранее. Оставляем настройки по умолчанию и сканируем шину I2C. Мы увидим, что программа обнаружила на шине одно устройство по адресу 0x68. Если прочитать из него 127 байтов (именно столько регистров имеет датчик MPU9250, техническое описание можно скачать в приложении к статье), то увидим следующее:
 Чтение всех регистров датчика MPU-9250 по I2C с помощью FT2232
Чтение всех регистров датчика MPU-9250 по I2C с помощью FT2232
Здесь нет показаний магнитометра. Магнитометр (он называется AK8963) – это отдельное устройство на кристалле, которое не активно при подаче питания на датчик MPU-9250. Его нужно активировать явно. Для этого необходимо в регистр под номером 0x37 (INT_PIN_CFG) записать значение 0x02. Для этого в программе в поле записи укажем команду «37 02», как на рисунке, и нажмём кнопку «Записать». Полное описание регистра приводится далее.
 Включение магнитометра датчика MPU-9250 через регистр I2C_SLV0_ADDR
Включение магнитометра датчика MPU-9250 через регистр I2C_SLV0_ADDR
Карта регистров магнитометра AK8963 представляет собой довольно короткую таблицу, состоящую всего из 13-ти байтов:
 Карта регистров магнитометра MPU-9250
Карта регистров магнитометра MPU-9250  Чтение регистров магнитометра MPU-9250 по I2C
Чтение регистров магнитометра MPU-9250 по I2C
Как видно, по адресу 0x00 размещается постоянный Device ID, который должен быть равен 0x48. В нашем случае так и есть. Это хороший признак. Значит, магнитометр как минимум отвечает осмысленные данные, а мы можем их читать.
Схема подключений датчика MPU-9250 к Arduino остаётся предельно простой:
| Вывод датчика MPU-9250 | Вывод Arduino |
|---|---|
| SCL | A5 |
| SDA | A4 |
| VCC | +3.3V |
| GND | GND |
Для того чтобы использовать датчик MPU-9250 в режиме магнитометра, следует придерживаться такой последовательности действий:
- настроить регистр управления питанием PWR_MGMT_1 по адресу 0x6B;
 Структура регистра PWR_MGMT_1 датчика MPU-9255
Структура регистра PWR_MGMT_1 датчика MPU-9255 - настроить пользовательский регистр контроля USER_CTRL по адресу 0x6A чтобы отключить мастер шины I2C (не будем его использовать); Структура регистра USER_CTRL датчика MPU-9255
- настроить регистр конфигурации прерываний INT_PIN_CFG по адресу 0x37 чтобы включить магнитометр; Структура регистра INT_PIN_CFG датчика MPU-9255
- настроить регистр управления магнитометра CNTL1 по адресу 0x0A на непрерывное проведение измерений. Структура регистра CNTL1 магнитометра AK8963
 Структура регистра PWR_MGMT_1 датчика MPU-9255
Структура регистра PWR_MGMT_1 датчика MPU-9255 Структура регистра USER_CTRL датчика MPU-9255
Структура регистра USER_CTRL датчика MPU-9255 Структура регистра INT_PIN_CFG датчика MPU-9255
Структура регистра INT_PIN_CFG датчика MPU-9255 Структура регистра CNTL1 магнитометра AK8963
Структура регистра CNTL1 магнитометра AK8963Реализуем это в следующем коде.
Скетч для чтения показаний датчика MPU-9255 (разворачивается)
Теперь остаётся перевести показания индукции магнитного поля в азимут. Для этого воспользуемся следующей формулой:
Будем двигаться к следующей задаче.
2 Подключение 7-сегментного светодиодногоиндикатора к Arduino
В качестве индикатора для вывода показаний компаса будем использовать семисегментный индикатор 3361AS-1. Он построен по принципу индикатора с общим катодом.
Светодиодный индикатор с общим катодом – это тип индикатора, состоящий из нескольких светодиодов в одном корпусе, у которых общая земля, а питание на каждый светодиод подаётся отдельно.
Напомню, что 7-сегментным индикатор называется из-за того, что он состоит из 7-ми светодиодов, которые расположены в форме цифры «8». Зажигая определённые сегменты, можно изображать разные цифры. Это похоже на цифры индекса на почтовом конверте: закрашивая определённые участки, мы пишем разные индексы. Зачастую дополнительно к 7-ми сегментам, индикатор содержит десятичную точку. Также индикатор может иметь несколько цифр – разрядов. Сегменты индикатора обозначаются латинскими буквами от A до G, как на рисунке.
 Обозначение сегментов индикатора латинскими буквами
Обозначение сегментов индикатора латинскими буквами
Воспользуемся популярным способом управления 7-сегментным индикатором с помощью драйвера CD4511. Это микросхема двоично-десятичного преобразователя, который переводит двоичный код числа в напряжение на соответствующих цифре сегментах индикатора. Такой преобразователь использует всего 4 ножки Arduino. Например, если необходимо отобразить на индикаторе десятичное число «7», следует выставить на входе преобразователя двоичное «0111». Микросхема CD4511 выполняется в разных типах корпусов. Назначение выводов в исполнении с 16-тью ножками, такое:
 Выводы двоично-десятичного преобразователя CD4511
Выводы двоично-десятичного преобразователя CD4511
Отечественными аналогами данного преобразователя являются микросхемы серий ИД1…ИД7.
При подключении двоичного декодера будем руководствоваться следующей таблицей:
| Вывод CD4511 | Назначение | Примечание |
|---|---|---|
| A0. A3 | Входы двоичного преобразователя | Соответствуют разрядам двоичного числа. |
| a. g | Выходы на сегменты индикатора | Подключаются через токоограничительные резисторы к соответствующим сегментам светодиодного индикатора. |
| Lamp Test# | Тест индикатора (включает все сегменты) | Подключим к питанию, не использовать его. |
| Blanking# | Очистка индикатора (отключает все сегменты) | Подключим к питанию, чтобы не использовать его. |
| Latch Enabled# | Выход активен | Будет подключен к земле, чтобы выход был всегда активен. |
| VDD | Питание микросхемы и индикатора | От 3 до 15 В. |
| GND | Земля | Общая у CD4511, Arduino, 7-сегментного индикатора. |
Индикатор 3361AS не имеет токоограничительных резисторов, поэтому необходимо озаботиться этим самому, подключая индикатор. При напряжении питания 5 В сопротивление на каждый сегмент должно быть около 200 Ом.
Желательно также подключить керамический конденсатор ёмкостью примерно 1 мкФ между землёй и питанием микросхемы CD4511.
Нам нужно одновременно управлять тремя разрядами десятичного числа, используя только один преобразователь CD4511. Но чисто физически это невозможно. Однако можно добиться иллюзии постоянного свечения всех разрядов светодиодного индикатора. Для этого придётся быстро переключаться между разрядами, постоянно обновляя показание каждого разряда. Мы будем поочерёдно активировать каждый из разрядов индикатора 3361AS, выставлять на нём с помощью двоичного преобразователя CD4511 нужную цифру, а затем переключаться на следующий разряд.
Для человеческого глаза такое переключение между разрядами будет незаметно, но если результат снять на видео, то можно увидеть, как мерцают разряды чисел при переключении между разрядами, и даже мерцание отдельных светодиодов.
Скетч для управления трёхразрядным 7-сегментным индикатором (разворачивается)  Управление трёхразрядным семисегментным индикатором с помощью преобразователя CD4511 и Arduino
Управление трёхразрядным семисегментным индикатором с помощью преобразователя CD4511 и Arduino
Итак, теперь мы умеем выводить трёхзначные числа на 7-сегментный индикатор, что нам понадобится для отображения азимута.
3 Подключение динамика / пьезоизлучателяк Arduino
Для оповещения об отклонении от азимута, как было решено, будем использовать звуковой пьезоизлучатель. Мы уже обсуждали в отдельной статье, как подключить пьезоизлучатель к Arduino. Поэтому останавливаться подробно здесь не будем. Напомню ключевые моменты.
Схема подключения излучателя к Arduino очень простая: объединяем земли, а в цепь питания ставим резистор сопротивлением около 100 Ом (для защиты порта Ardunio).
 Схема подключения пьезоизлучателя к Arduino
Схема подключения пьезоизлучателя к Arduino
Для Arduino есть специальные функции tone() и noTone(), которые используются для извлечения звука заданной частоты:
Здесь piezoPin – номер вывода Arduino, к которой подключён звуковой извещатель. Давайте изменим в предыдущем скетче функцию loop() таким образом (изменения выделены жирным):
И конечно же, не забудем объявить в начале скетча piezoPin и задать ему режим работы OUTPUT. Теперь каждую минуту излучатель будет подавать звуковой сигнал продолжительностью 500 мс и частотой 1000 Гц.
4 Собираем всё вместе:компас на Arduino
Схема нашего устройства будет такой (нарисована в DipTrace Schematic):
 Схема электронного компаса на MPU-9255 и Arduino
Схема электронного компаса на MPU-9255 и Arduino
Здесь ARD1 – это Arduino Nano, CD4511 – драйвер управления 7-сегментным дисплеем 3361AS, MPU-9255 – собственно, сам модуль с магнитным датчиком, SW1 – кнопка для запуска и останова отслеживания азимута, BUZ – звуковой извещатель, а PWR – клемма для подачи внешнего питания от батареи «Крона» на устройство.
Монтаж компаса будем производить на печатной плате, которую «разведём» в программе DipTrace PCB Layout.
 Печатная плата для электронного компаса на Arduino
Печатная плата для электронного компаса на Arduino
Закажем печатную плату здесь. На этом предприятии делают всё быстро и качественно. Например, изготовление данной печатной платы заняло около суток от момента заказа до отправки. Единственный минус – придётся долго ждать доставки из Китая (2-4 недели).
 Печатная плата для электронного компаса на MPU-9255 и Arduino
Печатная плата для электронного компаса на MPU-9255 и Arduino
Распаяем элементы на плате.
 Пайка радиоэлементов на плате электронного компаса MPU-9250
Пайка радиоэлементов на плате электронного компаса MPU-9250
После распайки компонентов плата электронного компаса будет выглядеть так:
 Печатная плата для электронного компаса с распаянными элементами
Печатная плата для электронного компаса с распаянными элементами
Останется только придумать какой-то корпус для платы с компасом.
 Сборка платы с датчиком MPU-9250 в корпус
Сборка платы с датчиком MPU-9250 в корпус
В процессе экспериментов выяснились несколько деталей, которые потребовали доработки. Во-первых, динамик вносит искажения в показания компаса. Величина искажения зависит от типа динамика и его близости к датчику. Поэтому его желательно отнести подальше от датчика, а не размещать непосредственно на плате.
 Электронный компас в процессе отладки
Электронный компас в процессе отладки
Во-вторых, изначальный скетч определения азимута выводит довольно приблизительные и нестабильные измерения. Поэтому в части работы компаса всё было переделано. Я взял за основу скетч, представленный в этой статье. Он отличается тем, что используются показания акселерометра для коррекции наклона датчика, а также вводятся дополнительные коррекции, связанные с индивидуальными особенностями датчика (в частности, чувствительность ASAX, ASAY, ASAZ). Для нормальной работы этого скетча необходимо сделать следующее.
- Определить магнитное наклонение географического места, в котором вы находитесь. Сделать это можно, например, на сайте magnetic-declination.com. Значение магнитного наклонения необходимо присвоить переменной Declination скетча.
- Скорректировать остаточный угол наклона акселерометра MPU-9255. Для этого следует положить датчик на ровную горизонтальную поверхность и добиться того, чтобы в выводе монитора последовательного порта значения accel_pitch и accel_roll были максимально близкими к нулю. Это достигается в несколько итераций, последовательными приближениями. Начните с нулевых значений.
- Ввести калибровочные коэффициенты. Для этого необходимо задать Record_data = true . Скомпилировать и загрузить в плату скетч. Медленно вращать компас во всех направлениях, пока в мониторе порта не появятся значения коэффициентов. Скопировать из монитора порта эти значения в соответствующие поля в скетче (они там обозначены). Вернуть Record_data = false , скомпилировать и загрузить скетч в Arduino с новыми коэффициентами.
Для всего описанного ниже переменная DEBUG в скетче должна быть true. Более подробные пояснения приводятся в самом скетче.
От того, насколько качественно вы сделаете предварительную работу, будет сильно зависеть работа и стабильность показаний компаса.
Скетч для магнитного компаса на датчике MPU-9250/MPU-9255 (разворачивается)
Источник