- Тяжелый FPV-квадрокоптер — разработка, сборка и первый полет
- Разработка
- Сборка
- Первый полет
- Как новичку собрать квадрокоптер ZMR250 / QAV250 с Aliexpress (1 часть)
- Пролог
- Список к покупке:
- Сборка
- Пайка
- Крепим плату питания, регуляторы оборотов
- Крепим полетный контроллер, приемник
- Соединяем все проводами
- Прикручиваем верхнюю часть рамы, смотрим, что получилось
- Итого:
- О падениях и, что делать пока ждем посылку
- Обещанные ссылки на статьи
Тяжелый FPV-квадрокоптер — разработка, сборка и первый полет

Я занимаюсь квадрокоптерами в качестве хобби уже почти полгода. На свой последний аппарат я навесил камеру (GoPro HD Hero 2) и видеопередатчик, и летал на нем через видеоочки — крутейшее ощущение, я вам хочу сказать. Нo техника была нe идеальной. Старая рама X525 с алюминиевыми балками была недостаточно стабильной для веса в 1.8кг, коптер в воздухе потряхивало, да и выглядело это всe достаточно колхозно. Поэтому было принятo решение строить новый квад, на собственноручно разработанной раме, с учетом всех потребностей. А потребности были следующие:
- Место под всe оборудование. На новой раме должно былo быть достаточно места для камеры (без пропеллеров в картинке), передатчика, OSD, большого аккумулятора, плюс электроники управления (плата контроллера полета и GPS).
- Стабильность. Рама должна быть максимально жесткой, но в то же время обеспечивать виброизоляцию камеры от моторов.
- Внешний вид. Хотелось сделать коптер таким, чтобы было приятно на него смотреть, а не типичным для начинающих комком проводов и стяжек на стандартной крестовидной раме.
- (Вторично) Вес. Коптер на базe X525 весил 1.8кг с камерой и батарейкой, хотелось эту цифру слегка уменьшить, заодно и приподнять время полета на одном аккумуляторе.
Пораскинув мозгами и приняв решение, как всe это будет выглядеть, я установил LibreCAD и принялся за работу.
Разработка
Вдохновением для общей формы коптера послужила рама Spidex v2. Мне понравилось расположение компонентов в одном уровне — камера спереди, потом смещенный вперед центр, и подвешенный сзади аккумулятор. Такая схема позволяет расположить камеру так, что пропеллеры не попадают в ее поле зрения. Также они придумали хороший способ виброизоляции — камера и аккумулятор подвешиваются к двум горизонтальным трубам, которые в свою очередь монтируются на центр с помощью резиновых изоляторов. Масса аккумулятора помогает уменьшить вибрации, передающиеся нa камеру. Ну и смотрится такой коптер, на мой взгляд, очень даже прилично.
Однако полностью под мои потребности Spidex не подходил. Во-первых, в нем использованы алюминиевые трубки, от которых я уже натерпелся — гнутся они, причем даже без аварий, просто от постоянной нагрузки. Во-вторых, я использую камеру GoPro Hero HD2, одолженную на неопределенный срок у сожителя — я нe готов монтировать ее на коптер без защитного корпуса, а Spidex этого не предусматривает.
Короче говоря, от Spidex я решил использовать только общую компоновку. Раму я решил собирать самостоятельно, используя стеклопластиковые пластины и карбоновые трубы с зажимами. У знакомого дома стоит фрезерный станок, на котором можно вырезать пластины необходимой формы. Чтобы создать эту самую форму, я засел за LibreCAD, и вот что у меня получилось:

Общий вид коптера сверху
Центральные пластины и держатели камеры и аккумулятора
Удовлетворившись данным результатом, я передал чертежи знакомому, и заказал всe необходимые детали в местных (немецких) онлайн-магазинах. В частности, были куплены карбоновыe трубки (16×14мм, метровой длины, три штуки — для рамы нужны будут две, ну и про запас), зажимы для них вместе с подходящими винтами/гайками (из набора FCP HL от Flyduino), провода для прокладки через трубки к моторам, виброизоляторы (сайлент-блоки под М3), и куча всякой мелочевки.
Всю электронику я решил использовать с предыдущего коптера. Два квада мнe ни к чему, все прекрасно работает — зачем покупать новые детали? Список той самой электроники и других деталей, перекочевавших с предыдущей модели:
- Моторы: 4x NTM 28-30 750kv
- Контроллеры моторов: 4x HobbyKing Blue Series 30A, с прошивкой SimonK
- Пропеллеры: 4x Graupner E-Prop 11×5
- Плата управления: Crius MultiWii SE v0.1, с MultiWii 2.2
- Аккумуляторы: Turnigy Nanotech 4S 4500mAh 25-35C
- Камера: GoPro HD Hero2
- Видеопередатчик: ImmersionRC 5.8G 25mW
- Антенна: Clowerleaf 5.8G, DIY от умельца на местном форуме
- OSD: MinimOSD с прошивкой KV Team OSD для MultiWii 2.2
- GPS: Drotek I2C GPS
- Радиоприемник: Graupner HoTT GR-16, под мой передатчик (MX-16)
Сборка
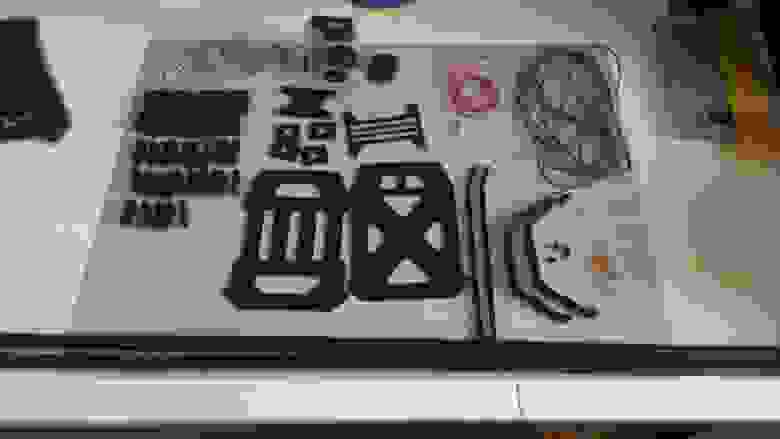
Детали разложены на столе, сборка начинается. Порядок долго не продержался…
Для начала пилим трубки под нужную длину — 22см и 28см, все четыре пилятся из одной метровой трубки. Пилкой для металла с мелкими зубьями идет очень хорошо.

Примеряем зажимы к нижнему центру.

Центр собран для проверки, все ли стыкуется как надо. Вроде да.

Прикрутил все остальные части рамы. Похоже, что почти готово? Как бы не так.

Оси моторов нужно обрезать — они выступают с задней стороны, и мешают установке сверху трубок. Обклеиваем мотор клейкой лентой, дабы не допустить попадания металлических опилок внутрь…
… и Дремелем его, Дремелем. Дремель режет 3-миллиметровую ось как нож масло. Главное защитные очки нe забыть.

Снимаем термоусадку с контроллеров моторов, чтобы припаять новые провода.

Провода нарезаны под нужную длину. Припаиваем разъмы для моторов. По три фазы на мотор, паять надо дофига — и это всeго лишь квад.

Размещаем контроллеры на нижней полураме.

Прикручиваем мотор и проводим кабеля через трубку. Всe собирается, как запланировано!

Изолируем контроллеры новой термоусадкой, когда все кабеля на месте.

Устанавливаем контроллеры моторов на их окончательную позицию. Проводов многовато, но достаточно чисто.
Разводка проводов от аккумулятора, методом RCExplorer. Сначала собираем провода от контроллеров пучком…

… стягиваем тонкой медной проволокой…

… спаиваем, и изолируем термоусадкой. Соединение получается механически крепкое, и хорошо проводящее.

Примеряем итоговую сборку: все совпадает! Верхняя полурама еще не прикручена, просто лежит сверху.

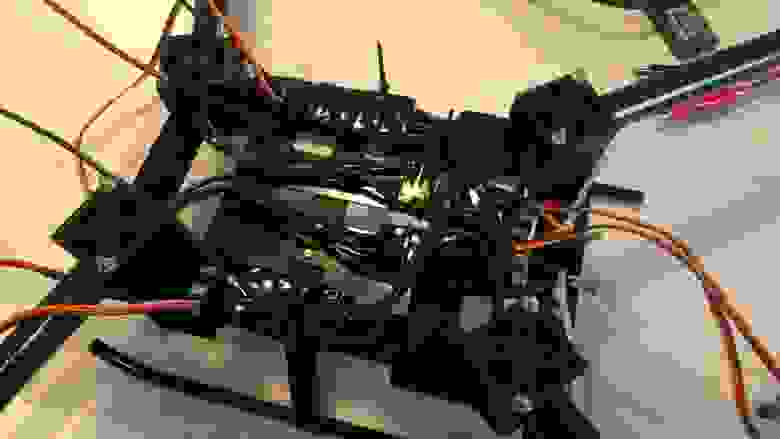
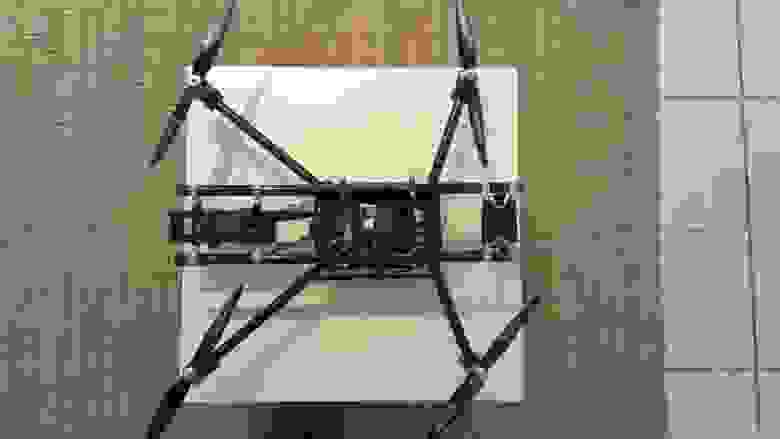
Верхняя полурама с управляющей электроникой в центре (контроллер и GPS) и виброизолированными трубками с камерой и аккумулятором.
Видеооборудование нa нижней стороне верхнего центра: видеокабель из камеры идет в MinimOSD, там на него накладывается информация из полетного контроллера, и дальше в видеопередатчик.

Нижняя полурама готова к установке верхней. Моторы приподняты, чтобы зажимы в центре не распались, когда будут откручены временные гайки.

Устанавливаем и прикручиваем верхнюю полураму. Затягиваем гайки, соединяем всe провода…





Вот такой коптер получился. Единственное, чем я недоволен — это вес. Облегчить конструкцию не удалось, за счет зажимов для трубок и огромного количества винтов с гайками общий вес поднялся до 1950 грамм. Однако это еще вполне в рамках мощности привода — мои сомнения были полностью развеяны во время первого полета.
Первый полет
Ощущения от первого полета: фантастика! Коптер стоит в воздухe как вкопанный, отлично управляется как визуально, так и через FPV. Время полета на одном заряде — 14 минут, и запаса мощности хватает с лихвой для вполнe комфортабельного полета и маневрирования. С настройками контроллера я еще слегка поковыряюсь — GPS работает плохо (позицию практически не держит, return-to-home не работает), да и PID-параметры надо подстроить (убавить P по оси крена, чтобы избавиться от видимых в видео легких поперечных вибраций).
В общем и целом, проект удался. Коптер я буду активно использовать для полетов и съемок в ближайшие недели.
Любые вопросы, комментарии и т.д. приветствуются.
Источник
Как новичку собрать квадрокоптер ZMR250 / QAV250 с Aliexpress (1 часть)
Пролог
Сейчас в интернете можно найти несколько полезных туториалов (все ссылки в конце статьи) на тему того, как самому собрать дрон на 250 раме. Но, собирая свой первый квадрик по этим статьям, я столкнулся с проблемами, которые не были никак освещены. А именно: я не нашел полный лист деталей и дополнительного оборудования, который мне нужен, цену полной сборки, а также некоторые практические и теоретические вопросы. Именно поэтому было решено сделать данную статью в виде обобщения моего личного опыта и опыта других людей, дабы помочь новичкам (таким как я) как можно продуктивнее построить свой первый дрон.
1 часть будет посвящена подбору деталей, оборудования, сборке и подключению всех узлов коптера. Программная сторона будет рассмотрена во 2 части.
Сразу отчет о том, что у меня получилось:
На видео заметно, что во время полета у дрона пропали ножки, но об этом позже
Список часто задаваемых вопросов:
В: Не проще ли купить готовый квадрик и летать?
О: Проще, только если вы не собираетесь продолжать улучшать свой дрон и строить другие. То есть хотите просто полетать, а не ломать себе голову и тратить дорогое время. Магазинный дрон в любом случае легче в освоении и проще в эксплуатации. В качестве альтернативы могу предложить MJX Bugs 3. Обзор на него здесь. Цена от
В: Нужно ли паять?
О: Да, нужно!
В: Собрать квадрик самому дешевле, чем купить в магазине?
О: Нет! Считаю это заблуждением. Если вы новичок, а раз вы читаете эту статью, скорее всего так оно и есть, то кроме деталей для квадрокоптера вам понадобится еще уйма всего. Прилагаю список ниже.
Список к покупке:
Для того, чтобы не заморачиваться с подбором основных компонентов, вижу отличную альтернативу в покупке готового набора. Не теряя времени на подбор деталей, вы получите все, что вам нужно.

Все, что вы получите в комплекте. На картинке не показаны соединительные провода от контроллера к передатчику
4000 руб.
1.1 Рама
1.2 Бесколлекторные моторы Marspower MX1806 2280KV на 12 А
1.3 Регуляторы Emax Simon K Series на 12A
1.4 Распределительная плата и провода питания
1.5 Полетный контроллер CC3D (мой выбор NAZE 32 FULL. Его я покупал отдельно, так как CC3D из комплекта сгорел. Разницы в настройке CC3D и NAZE 32 FULL нет. Вот интересная статья о полетных контроллерах).
1.6 Соединительные провода от контроллера к передатчику
1.7 4 пропеллера (2 левых, 2 правых)
1.8 Винты и шестигранники. Не знаю как у остальных, а мне положили аж 4 одинаковых шестигранника для винтиков, которыми крепятся моторы, но ни одного для закручивания винтов на раме

Приемник и передатчик Turnigy 9X
2) Пульт радиоуправления Turnigy 9X 9Ch + приемник (все в одном коплекте)
В: Почему именно эта модель?
О: Во-первых, 9 независимых каналов, то есть огромный запас возможностей на будущее. Во-вторых, огромное количество информации по настройке и прошивке. Очень популярная модель среди моделистов. Но, если вы настроены ОЧЕНЬ серьезно, то советую Turnigy 9XR или 9XR-Pro.
В: Можно ли взять модель подешевле?
О: Да, это полностью ваш выбор. Не советую брать аппаратуру меньше, чем с 6 каналами, так как кроме управления необходимо переключать полетные режимы. Кстати, есть готовые наборы уже с аппаратурой, например, такой.
3) Как минимум 2 дополнительных комплекта пропеллеров (в комплекте 4 шт: 2 левых, 2 правых)
Пропеллеры действительно расходный материал при первых полетах, так что лучше взять с запасом. Как ни странно, но с Китая заказывать дороже, да и ждать долго. Максимальный диаметр 5 дюймов. Я купил здесь.
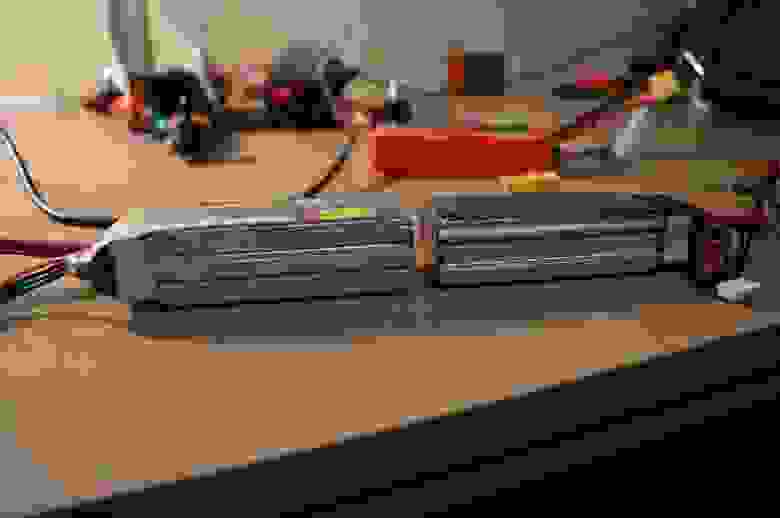
Аккумуляторы с Aliexpress. Оба вышли из строя. У левого отказала вторая банка, у правого — третья.

Слева: аккумулятор для пульта радиоуправления с JR разъемом (черная головка). Справа: аккумулятор для питания квадрокоптера
4) Как минимум 1 аккумулятор для питания квадрокоптера, а лучше 2
В: Зачем два? Тебе одного мало?
О: Да, мало! Аккумулятора хватает примерно на 10-12 мин полета, а заряжается он 1-2 ч, поэтому, чтобы, войдя в кураж, не идти подзаряжаться, а летать дальше, советую взять пару. Обратите внимание на маркировку аккумуляторов, прочитать про это можно здесь.
Крайне не советую приобретать аккумуляторы из Китая: оба аккумулятора, заказанные мной, вышли из строя, то есть перестали выдавать требуемое напряжение (отказало по одной банке). Да, возможно, дело случая, но с другими аккумуляторами таких проблем не было, да и экономия в 150 руб. не стоит риска.

Turnigy 9X c аккумулятором. Сидит очень плотно, крышка закрывается
5) Аккумулятор для пульта радиоуправления.
1199 руб.
В: Я же уже купил два. Нужен еще один?
О: Так точно. Для передатчика нужен специальный аккумулятор с низким током разряда.
В стандартном наборе пульт идет с креплением для батареек, что не приемлемо при частых вылетах. Объясняю: напряжение батарейки теряют быстро, с зарядкой проблема, а стоимость велика. Также стоит обратить внимание на наличие у аккумулятора JR разъема. В таком случае вам ничего не нужно будет перепаивать. Кстати, если вы собрались покупать другой аккумулятор (не такой как у меня), не поленитесь взять пульт с собой, чтобы примерить его на месте. Мой влезает в стандартный отсек с трудом, но крышка все-таки закрывается.
6) Зарядное устройство для аккумуляторов iMAX B6
iMAX B6 позволяет зарядить банки аккумулятора равномерно при помощи балансировочного разъема. Самая популярная зарядка.
В: Как этим пользоваться? Какие режимы выбрать?
О: Ответы здесь
7) Переходник с XT-60 на T-коннектор
Если берете такие же аккумуляторы для питания квадрокоптера, как и у меня, вам необходим переходник для зарядки, так как в стандартном наборе iMAX B6 его нет.
8) Индикатор напряжения для 1-8 баночного Li-Po аккумулятора
Данная штука покажет напряжение по банкам, а также уведомит вас, когда заряд опустится ниже заданного вами уровня, дабы коптер не упал с высоты и батарея жила долго. Видео о том, как пользоваться.
9) Застежка Tarrot 300 мм для крепления аккумулятора (2 шт. в комплекте). Эластичный ремешок 22*200мм для крепления камеры.
Застежки и ремешки сугубо личное дело. То, каким способом будет закреплен аккумулятор и камера, ограничивает лишь ваша фантазия. Обратите внимание на размеры ремешков.

4 винта на 16 мм вместо 8 мм
300 руб.
10.1 20 шайбочек под винты на раме и винты, удерживающие моторы. Дело в том, что шляпки у винтов маленькие и при натяге они портят раму
10.2 4 винта на 16 мм вместо 8 мм. С помощью таких винтов удалось закрепить еще и ножки, распечатанные на 3D принтере (видео с печати). Стандартные ножки сломались после одного жесткого приземления, нашел альтернативу в напечатанных. Вообще, высокие ножки полезная вещь при взлете с земли или мокрой поверхности
10.3 Термоусадка. Пригодится, когда будете прятать регуляторы
10.4 Пластиковые хомуты 10 см (9 шт.) Для фиксации регуляторов
10.5 Двухсторонний скотч, изолента
10.6 Винт и гайка под камеру. Ситуция подобная ремешкам — полностью ваша фантазия
10.7 Резинки. Пригодятся для фиксации приемника, контроллера, распределительной платы и регуляторов

Защита для пропеллеров, напечатанная на 3D принтере
10.8 Дополнительно: защита для пропеллеров. Печатал ее тоже на 3D принтере. Пригодилась только один раз, когда делал пробный взлет в комнате. После того, как врезался в шкаф, защита разлетелась. Больше ее не использую. Отверстия на защите, кстати, не совпадают с отверстиями на раме. Необходимо либо проделывать самому, либо дорабатывать на компьютере модель.
Всю мелочовку покупал тут1 и тут2.
10) Паяльник само-собой.
11878 — 13217 руб.
Если вы удивлены списком, то стоит заметить, что большая часть всего, что вы купите, послужит вам еще ни один раз.
Также хочу отметить, что цены постоянно меняются, поэтому гарантировать минимальную стоимость по ссылкам я не могу. Уверен, что можно найти дешевле. Я лишь поделился источниками один в один совпадающими с моими.
Сборка
Есть вероятность, что комплект деталей вам придет без инструкции по сборке рамы. Так было у меня. Если так и произошло, то собираем по картинке или видео. На данной стадии не стоит затягивать все винты в «боевой режим», возможно, придется разобрать раму еще не раз. Верхнюю часть на данном этапе прикручивать вообще не стоит, без нее работать с внутренностями коптера удобнее. Также не стоит забывать про шайбочки, о которых я писал выше.


Не забываем про шайбы. У вас конечно же белой пластины нет — это те самые остатки от 3D напечатанных ножек
Очень простая операция, если помнить про направления вращения двигателей. Определитесь, где у вас будет перед. Моторы с черной гайкой, вращающиеся по часовой стрелке, ставим на переднее левое и заднее правое места.

Обратите внимание на расположение двигателей

Крепление двигателей
Пайка
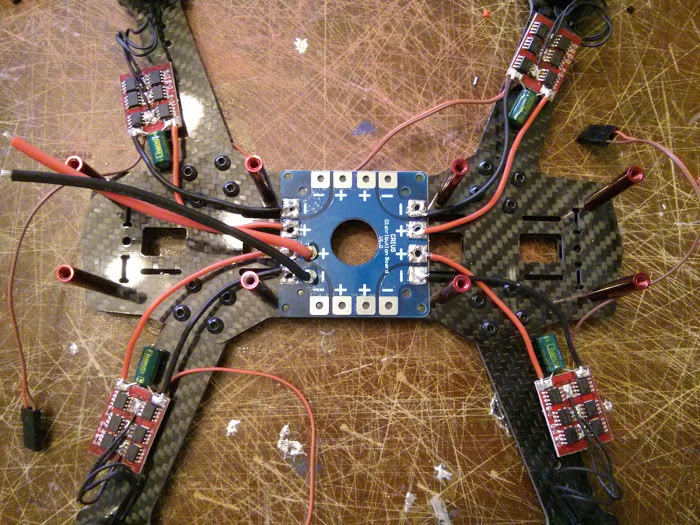
Пайка распределительной платы
Итак, вы уже примерились и решили, как у вас все будет установлено. Время паять. При пайке платы самое главное соблюдать полярность! На какие места паять провода не важно, все зависит от того, как вы собираетесь установить плату.

Припаиваем регуляторы и силовые провода. Соблюдаем полярность. (Мой вариант)
Припаиваем регуляторы и силовые провода. Соблюдаем полярность. (Другой вариант)
Припаиваем регуляторы к моторам
Первым делом снимаем с регуляторов стандартную красную теромоусадку. Для того, чтобы моторы вращались в нужную нам сторону, регуляторы к моторам следует припаять вот так:
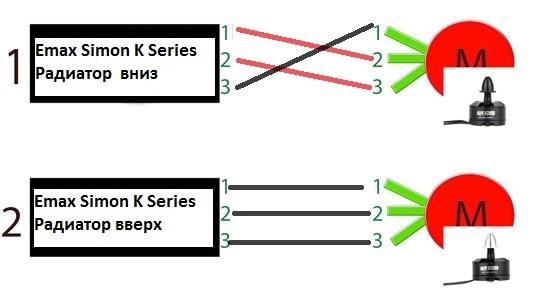
Подключение регуляторов к моторам
Думаю, что у вас возник вопрос: куда деть длинные провода от регуляторов. Их можно отпаять и убрать совсем, а можно обрезать под нужную длину. Второй способ для начинающих предпочтительнее, так как меньше шансов перегреть регулятор при пайке.
Полностью отпаянные штатные провода регулятора. Так делать не советую, лучше просто укоротить провода (не обращайте внимание на расположение проводов, картинка взята, чтобы показать другое. Правильная схема сверху)
Припаиваем T-коннектор. Полярность важна!
Крепим плату питания, регуляторы оборотов
Время крепить. Помните, что рама коптера проводит ток, поэтому плата должна быть изолирована от нее. Я посадил ее на два слоя двухстороннего скотча, с одного края притянул хомутом, а после закрепил резинкой.

Крепим плату. Два слоя двухстороннего скотча + хомут + резинка
Регуляторы оборотов я спрятал в термоусадку, посадил на двухсторонний скотч, затянул хомутами и для уверенности затянул резинкой. Выглядит более чем надежно

Крепим регуляторы. Термоусадка + двухсторонний скотч + хомуты + резинка
Крепим полетный контроллер, приемник
В дело опять вступают двухсторонний скотч и резинки. Опять же, чем жестче вы закрепит, тем лучше.
У меня это сделано следующим образом:
Крепим полетный контроллер (1). Трава осталась после краша
Крепим полетный контроллер (2)
Крепим приемник. Торцом он тоже сидит на двухстороннем скотче
Соединяем все проводами
Регуляторы к полетному контроллеру
От каждого из регуляторов у нас идет по 3 провода. Сделать нужно следующее: на трех из четырех регуляторах нужно вытащить из разъема красный провод. Подсоединять провода к контроллеру нужно в определенном порядке, об этом будет рассказано в следующей части.
На трех из четырех регуляторах нужно вытащить из разъема красный провод
Приемник к полетному контроллеру
А вот здесь порядок подсоединения проводов к каждому каналу не важен. Нужно лишь правильно подключить провод питания — белый провод ближе к стороне с наклейкой.
Соединяем приемник с полетным контроллером. Провод питания должен быть расположен белым ближе к стороне с наклейкой
Прикручиваем верхнюю часть рамы, смотрим, что получилось
Я также добавил «крепление для камеры».

«Крепление для камеры»
Итого:

О падениях и, что делать пока ждем посылку
Будьте готовы к тому, что сначала будут падения. А это: сломанные пропеллеры, ножки и камера в моем случае.

Сломанные ножки

Сломанная камера. Кстати, советую дополнительно заклеивать скотчем разъем с флешкой, есть шанс потери при падении
А вот видео с моего самого первого полета:
Чтобы такого не происходило, советую прикупить маленький квадрик для комнатных полетов. За время ожидания скилл управления поднимется очень сильно. Мой выбор пал на Syma X12S. Цена вопроса
Обещанные ссылки на статьи
Рад, если кому-то помог! Также открыт для ваших замечаний и комментариев.
Источник