- Самодельная машинка из картона на радиоуправлении своими руками
- Шаг 1: Смотрим видео
- Шаг 2: Детали
- Шаг 3: Изготавливаем основу и заднюю ось
- Шаг 4: Изготавливаем самодельный рулевой механизм
- Шаг 5: Изготавливаем картонные колёса
- Шаг 6: Создаём электроуправление
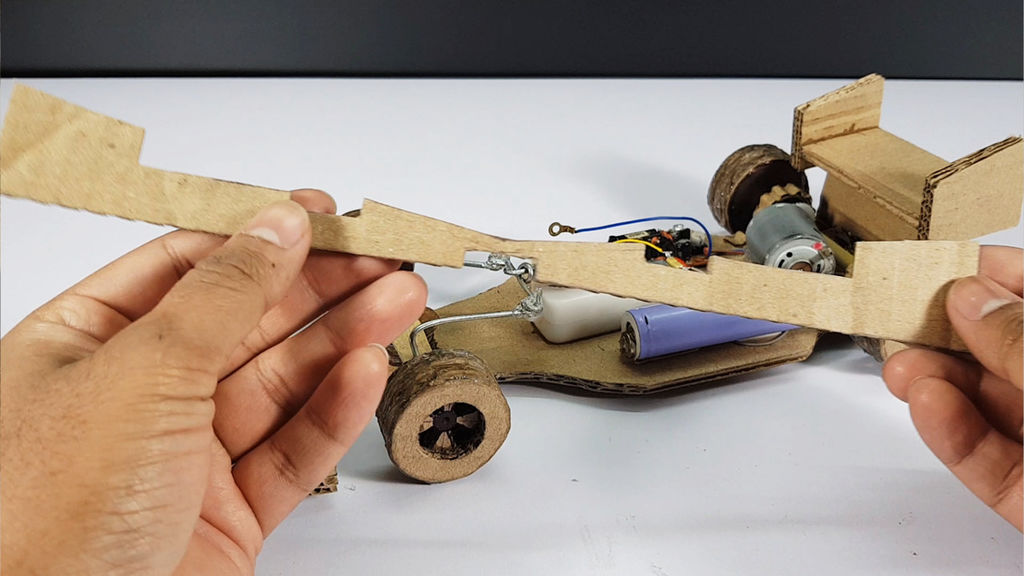
- Шаг 7: Соединяем компоненты
- Шаг 8: Создаём элементы кузова
- Аппаратура радиоуправления
- Система радиоуправления игрушками
Самодельная машинка из картона на радиоуправлении своими руками
Радиоуправляемые игрушки можно увидеть в руках каждого ребенка. Магазины переполнены разнообразными гаджетами и самым интересным на сегодняшний день будет собрать машинку на радиоуправлении своими руками.
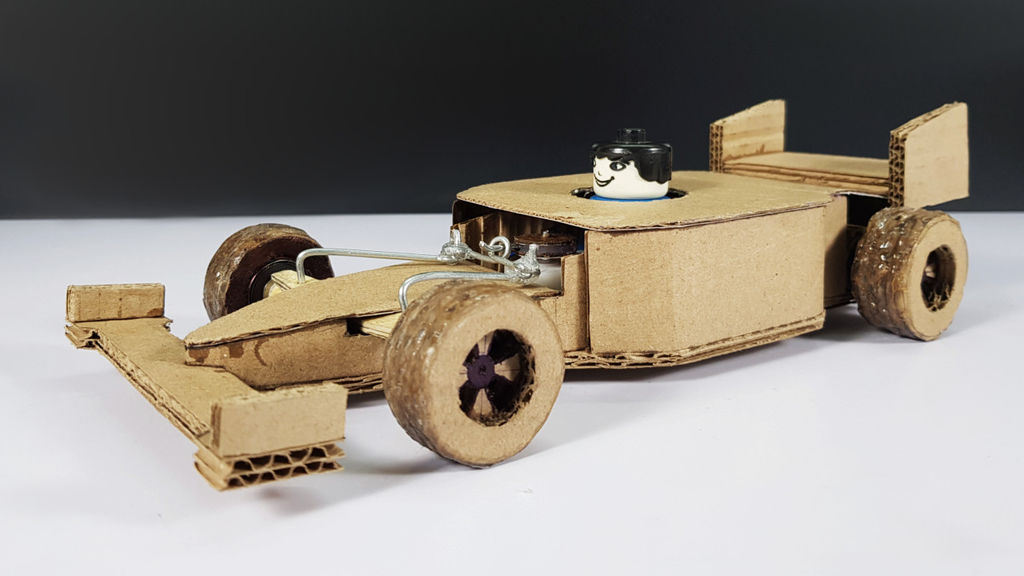
В этой инструкции я хочу показать вам, как сделать машинку на радиоуправлении своими руками. Вместо изготовления простой радиоуправляемой машинки, мы будем собирать картонную гоночную машинку F1. Картон общедоступен и делает возможным каждому собрать такую машинку прямо дома.
Все материалы для изготовления машинки легкодоступны каждому, также в статье есть ссылки для покупки деталей онлайн.
Шаг 1: Смотрим видео
Видео — замечательная вещь, позволяющая глубоко вникнуть в особенности и понять процесс изготовления. Но я также рекомендую просмотреть все шаги инструкции для изучения дополнительных сведений и картинок.
Шаг 2: Детали
- Высокоскоростной DC моторчик (Ebay или Amazon)
- DC моторчик с шестерёнкой (Ebay или Amazon)
- Модуль TP4056 (Ebay или Amazon)
- Литий-ионный аккумулятор (Ebay или Amazon)
- Выключатель (Ebay или Amazon)
- Пластиковые шестерёнки (Ebay или Amazon)
- Подшипник (Ebay или Amazon)
- Палочка от мороженого (Ebay или Amazon)
- Пистолет для горячего клея (Ebay или Amazon)
- Канцелярский нож (Ebay или Amazon)
В местных магазинах купите: картон, деревянные палочки, зубочистки, плату для схемы Rx Tx и провода.
Заметка: схема, которую я использовал, была добыта из старой сломанной радиоуправляемой машинки.
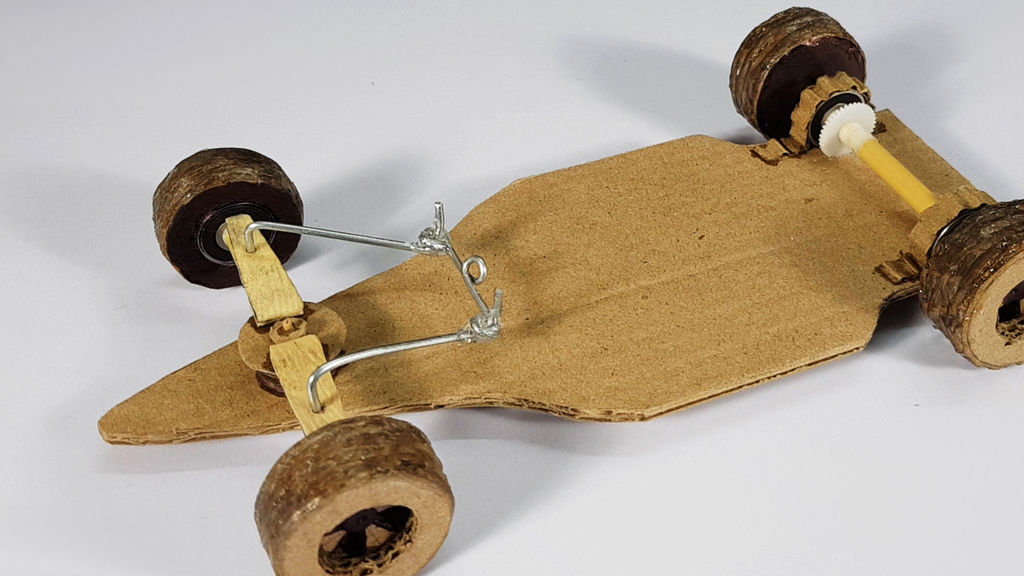
Шаг 3: Изготавливаем основу и заднюю ось
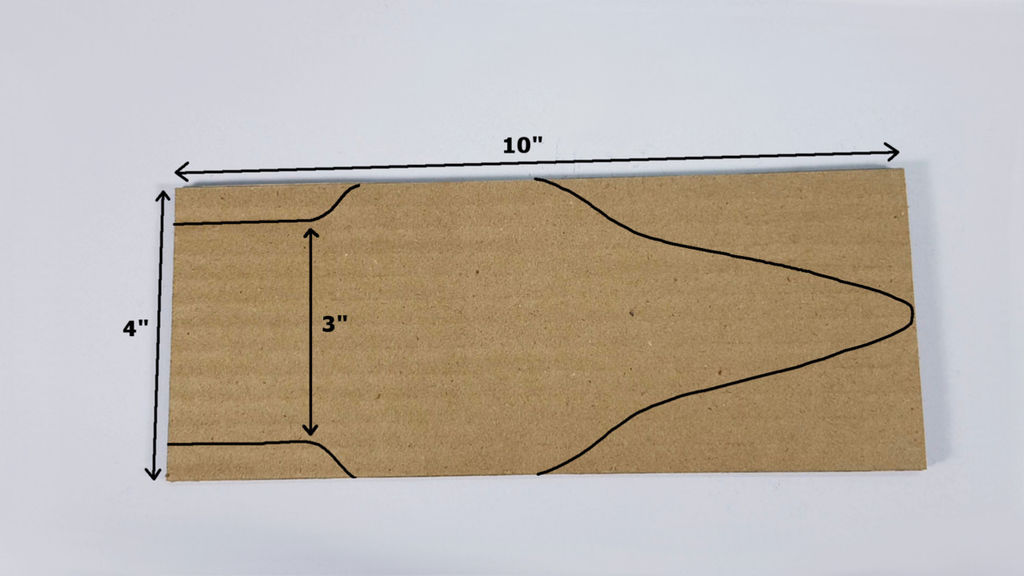


- Отрежьте кусок картона примерно 10*25 см
- Основываясь на картинке сверху, вырежьте основу для машинки F1
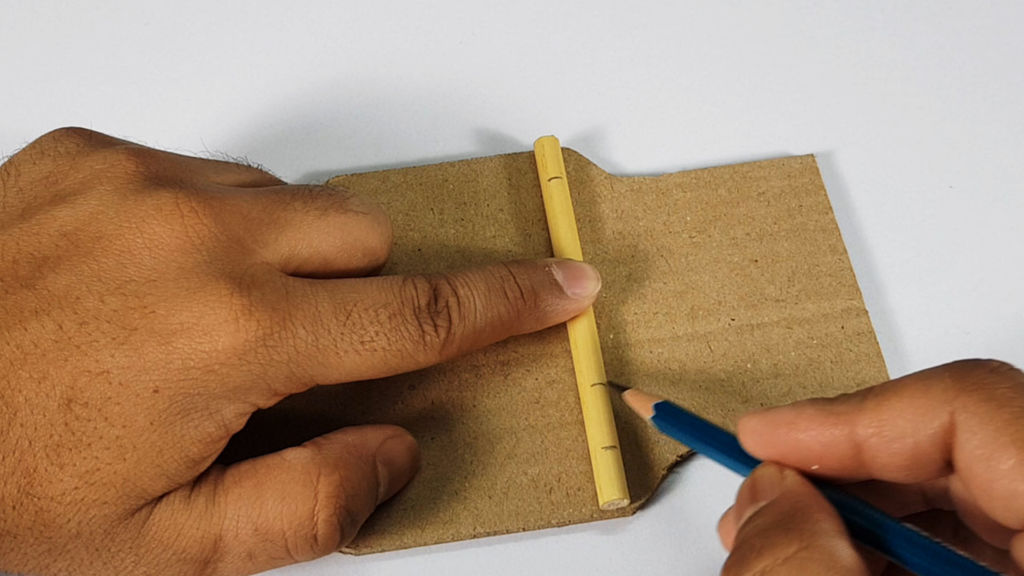
- Вырежьте деревянную палочку длиной 10см и сделайте на ней три отметки, как показано на картинке
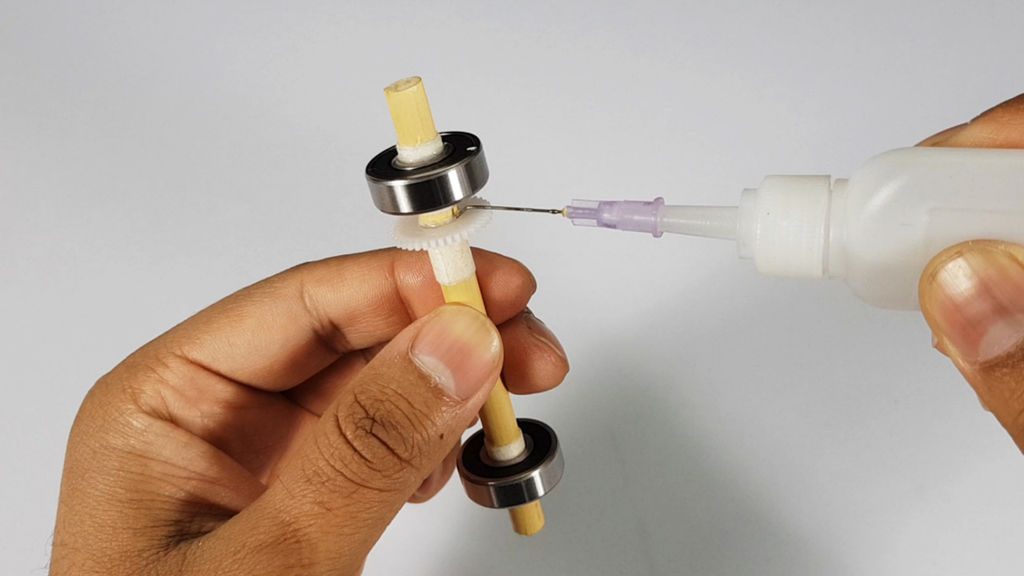
- Возьмите пластиковую шестерёнку и просверлите отверстие, равное диаметру деревянной палочки
- Закрепите шестерёнку на второй отметке и приклейте её суперклеем
- Закрепите подшипники на остальных двух отметках и также закрепите их суперклеем
Заметка: Для увеличения диаметра палочки можно использовать изоленту.
Шаг 4: Изготавливаем самодельный рулевой механизм
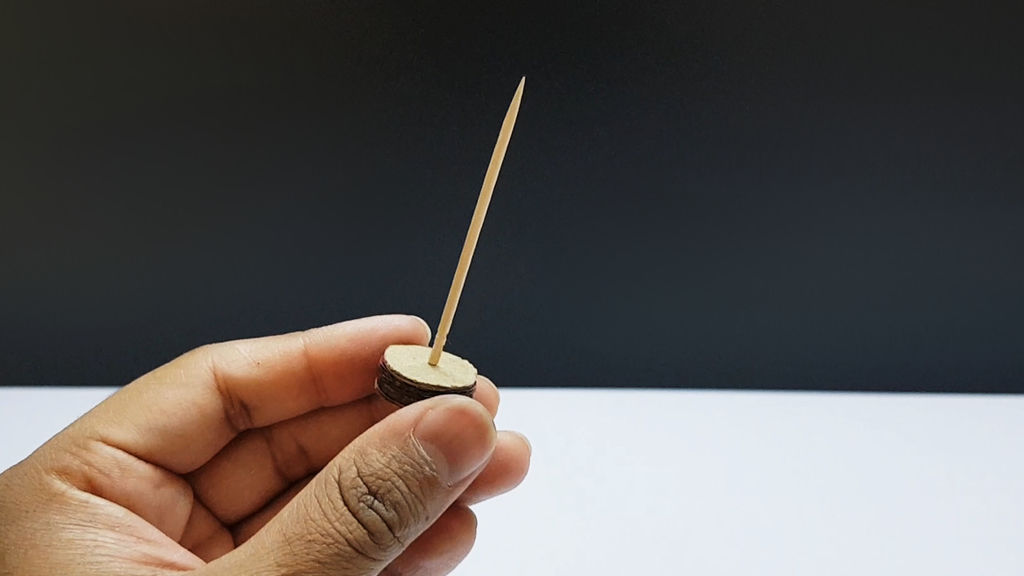
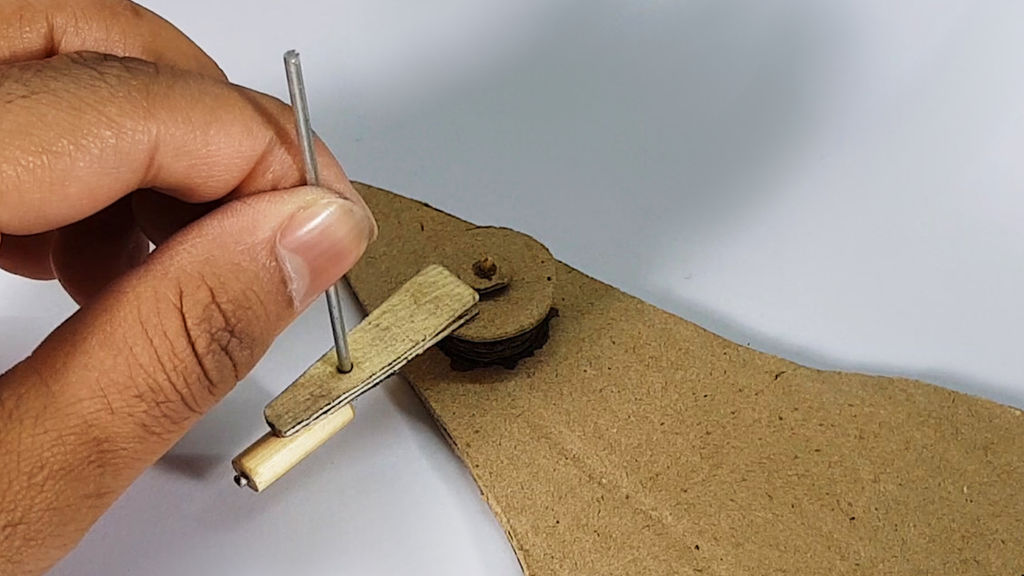
- Вырежьте несколько кружков из картона и сложите их один на другой.
- Просверлите отверстие в их центрах и закрепите там зубочистку.
- Поместите круглую картонку с зубочисткой в нос основы машинки, как показано на картинке.
- Вставьте еще один кусочек картона поверх зубочистки и закрепите его суперклеем, так чтобы он мог свободно вращаться.
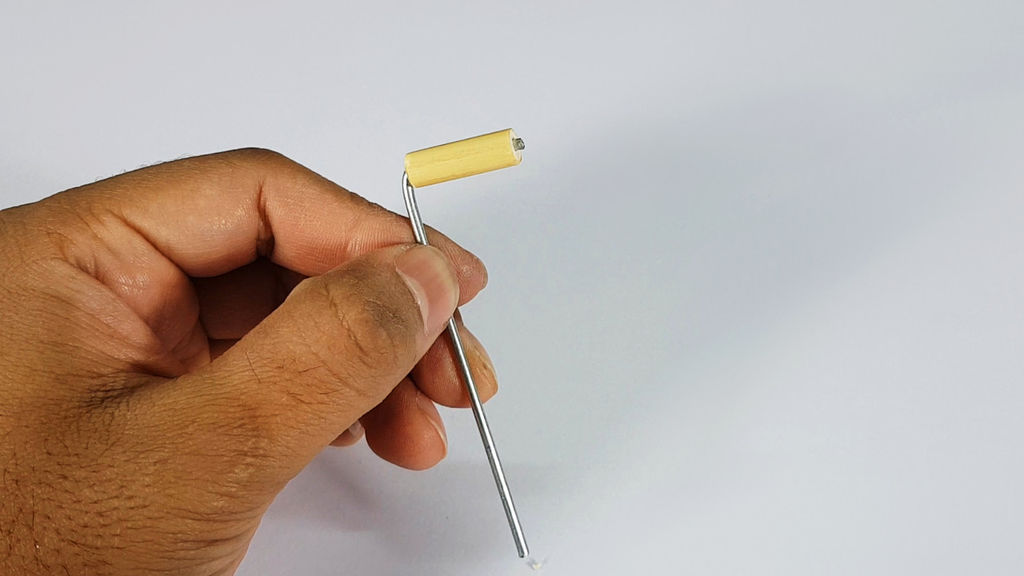
- Возьмите кусочек толстой стальной проволоки (как с настенного календаря) и согните её под углом 90° на расстоянии примерно 2,5 см.
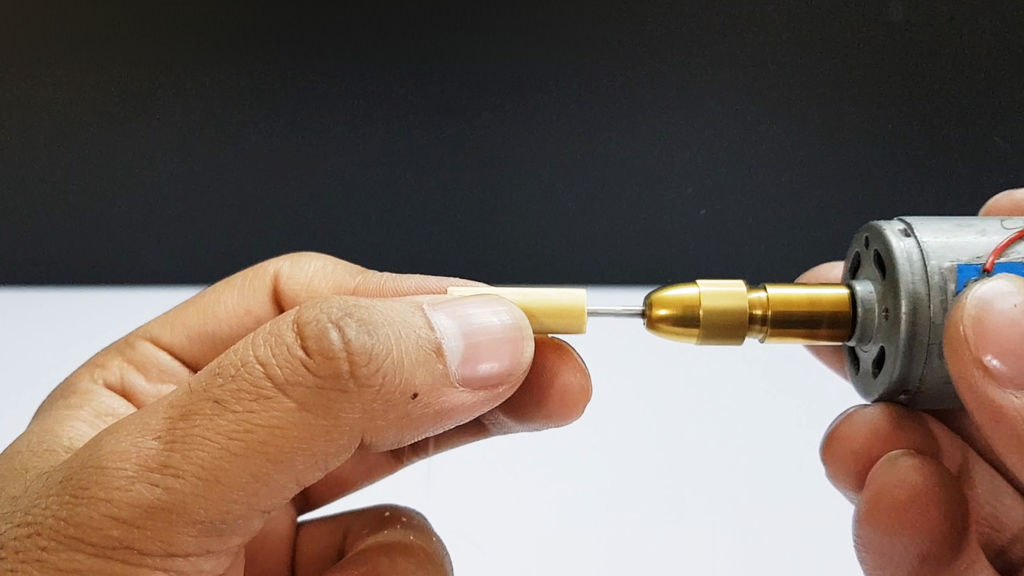
- Вырежьте деревянную палочку и сделайте отверстие в её центре при помощи мини-дрели.
- Вставьте толстую проволоку в отверстие и закрепите её суперклеем.
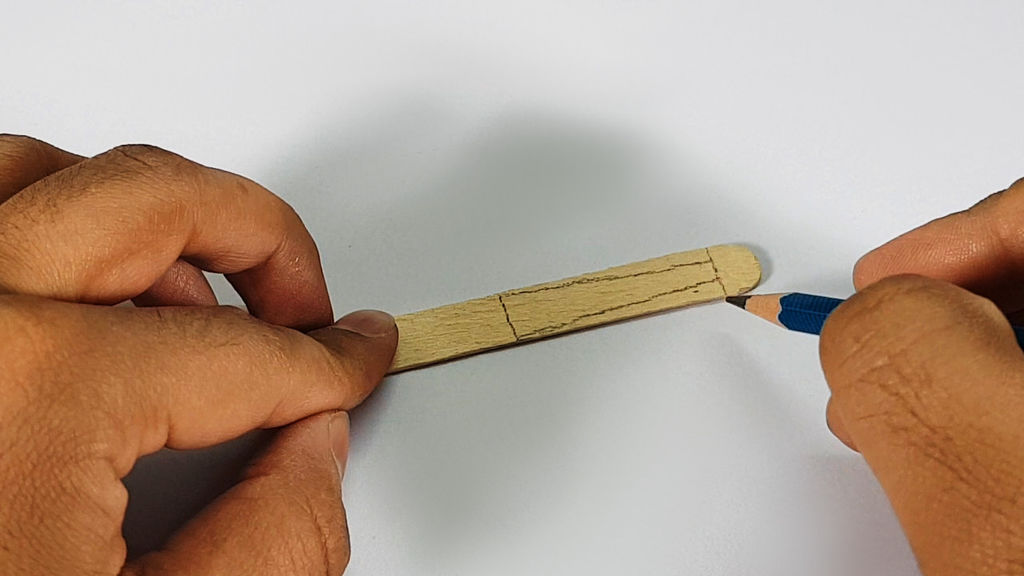
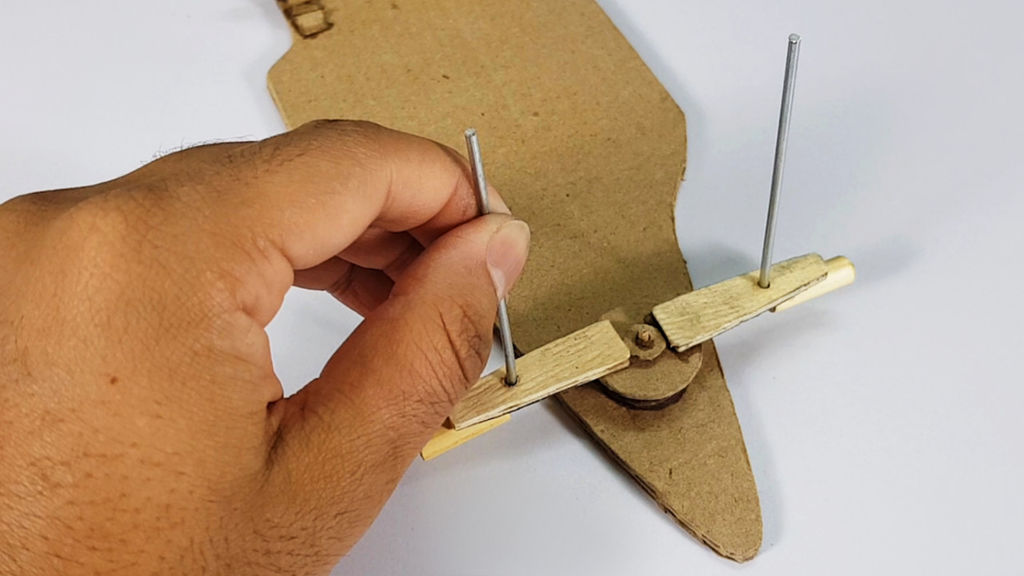
- Вырежьте несколько кусочков из палочки от мороженого, как показано на рисунке, и сделайте в них отверстия примерно на 3/4 от центральной точки.
- Соберите части вместе и закрепите их на основе машинки, как показано на картинке.
Заметка: обязательно посмотрите видео, чтобы избежать ошибок.
Шаг 5: Изготавливаем картонные колёса
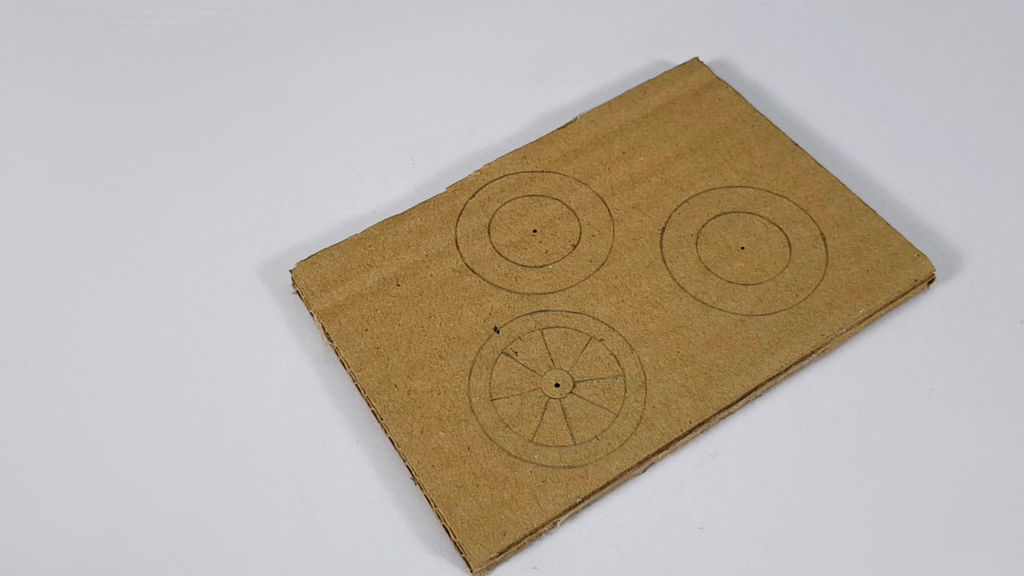




- Нарисуйте на картоне три круга примерно 4 см в диаметре.
- Поместите подшипник в центр круга и обведите вокруг него круг.
- На одном из кругов нарисуйте несколько спиц.
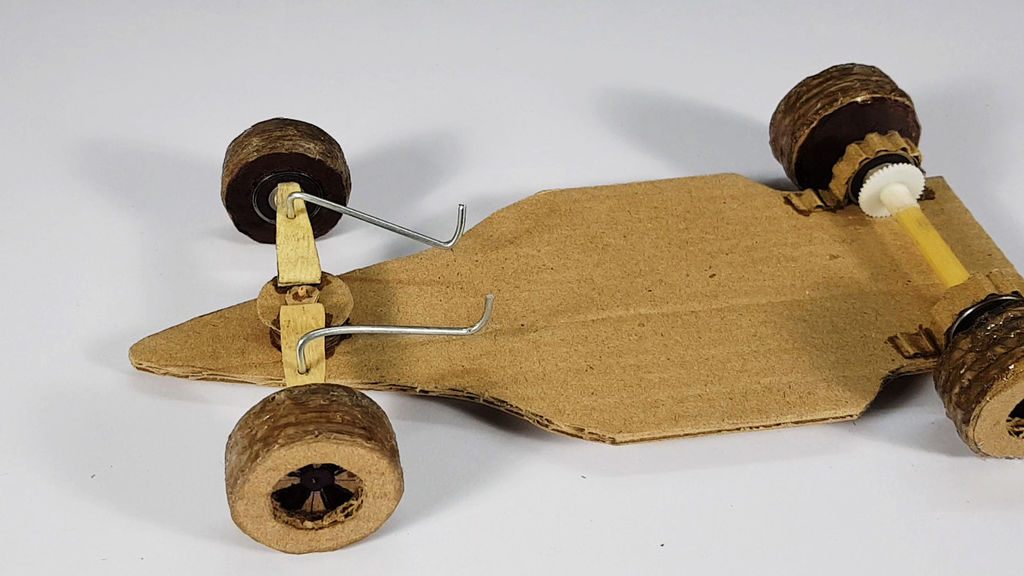
- Вырежьте кружочки и положите один на другой, чтобы создать толстое колесо.
- Поместите подшипник на колесо и закрепите его суперклеем.
- Сделайте два колеса с подшипниками и два без подшипников.
- Прикрепите колёса к машинке F1 и закрепите их суперклеем.
Шаг 6: Создаём электроуправление
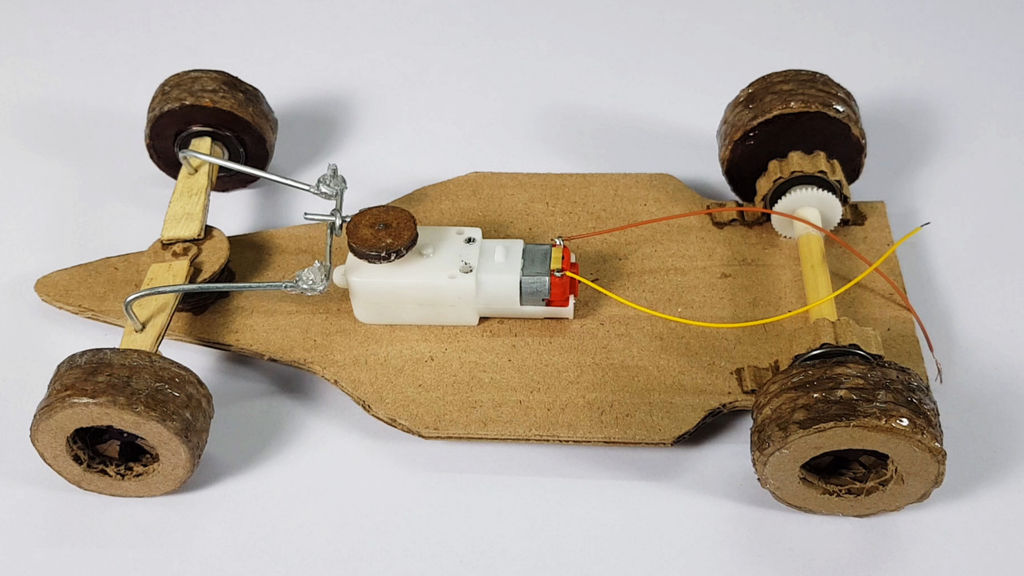
- Используя плоскогубцы, закрепите оба провода как показано на картинке.
- Возьмите моторчик с шестерёнкой и прикрепите круглую картонку на его валу.
- Положите кусок толстого провода поверх картонки.
- Добавьте горячего клея и проложите проволоку между слоями картона.
- Прикрепите мотор к рулевому механизму и протестируйте его, чтобы убедиться, что он работает хорошо.
Заметка: Невозможно с помощью слов объяснить всё правильно, так что я рекомендую посмотреть видео и избежать возможных сомнений.
Шаг 7: Соединяем компоненты
- Возьмите высокоскоростной мотор и закрепите маленькую пластиковую шестерёнку на его валу.
- Поместите моторчик на основе машинки и закрепите его горячим клеем, этот моторчик будет приводить в движение заднюю ось машинки.
- Поместите модуль TP4056 в заднюю часть машинки.
- Соедините выключатель с модулем зарядки.
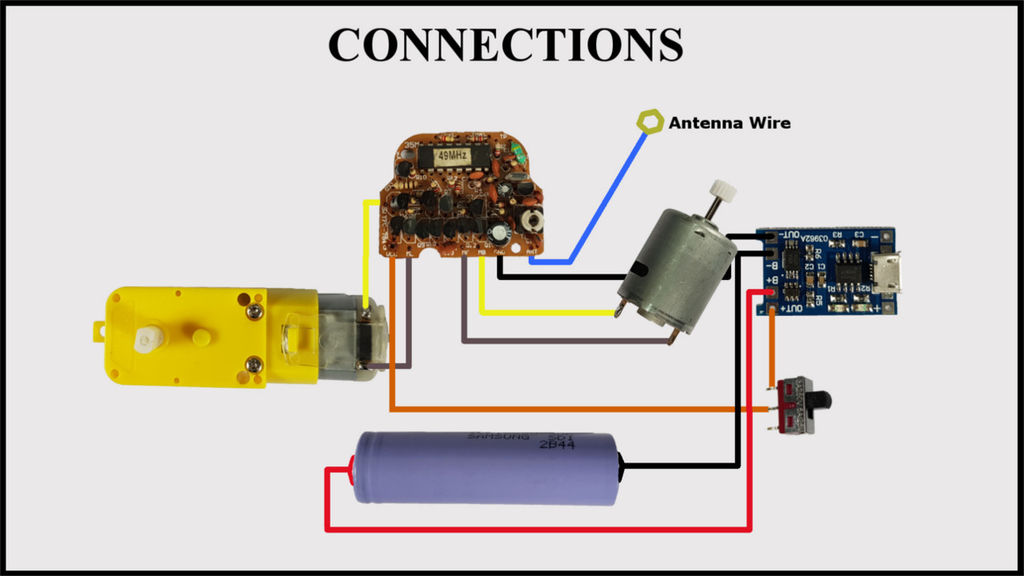
- Достаньте схему приёмника из старой сломанной радиоуправляемой машинки, или сделайте свой по одной из схем, которые можно найти в интернете.
- Ссылаясь на приложенную выше схему, соедините вместе все компоненты.
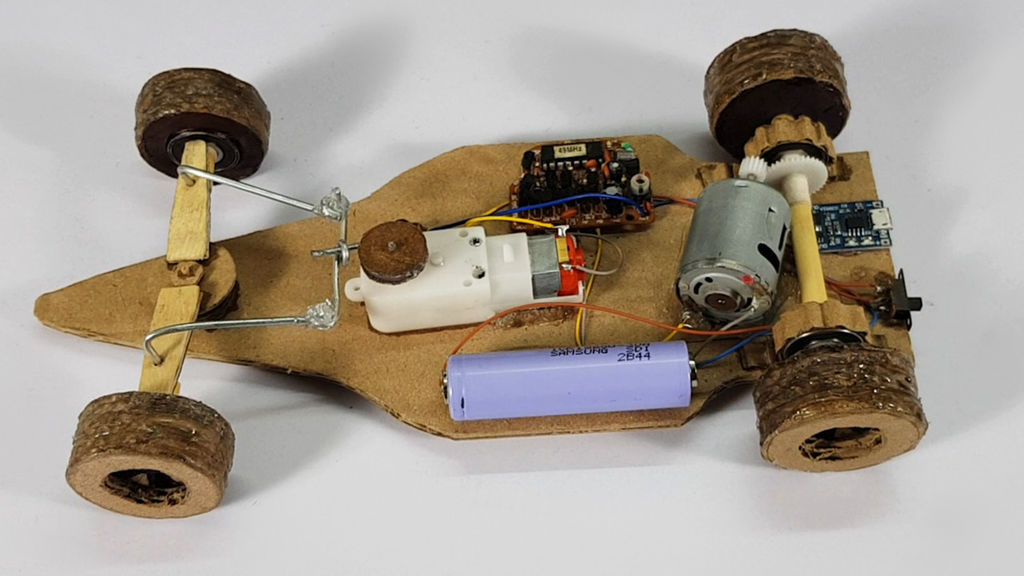
Шаг 8: Создаём элементы кузова



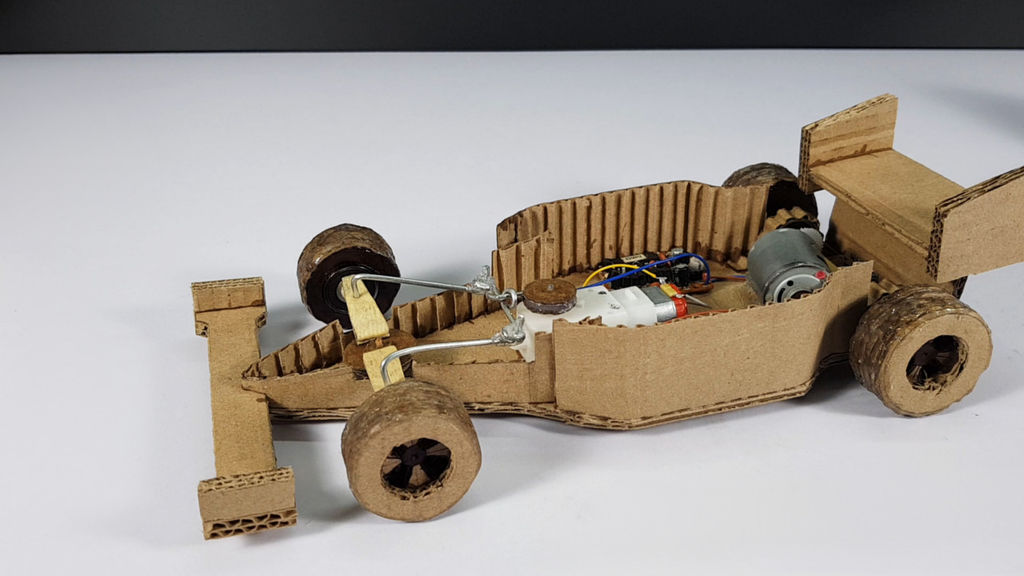
- Сделайте переднее крыло из картона и прикрепите его к кузову суперклеем.
- Таким же образом сделайте и прикрепите заднее крыло.
- Завершите создание кузова, вырезав и приклеив нужные картонные части.
- Для изготовления кузова, ссылайтесь на приложенные картинки.
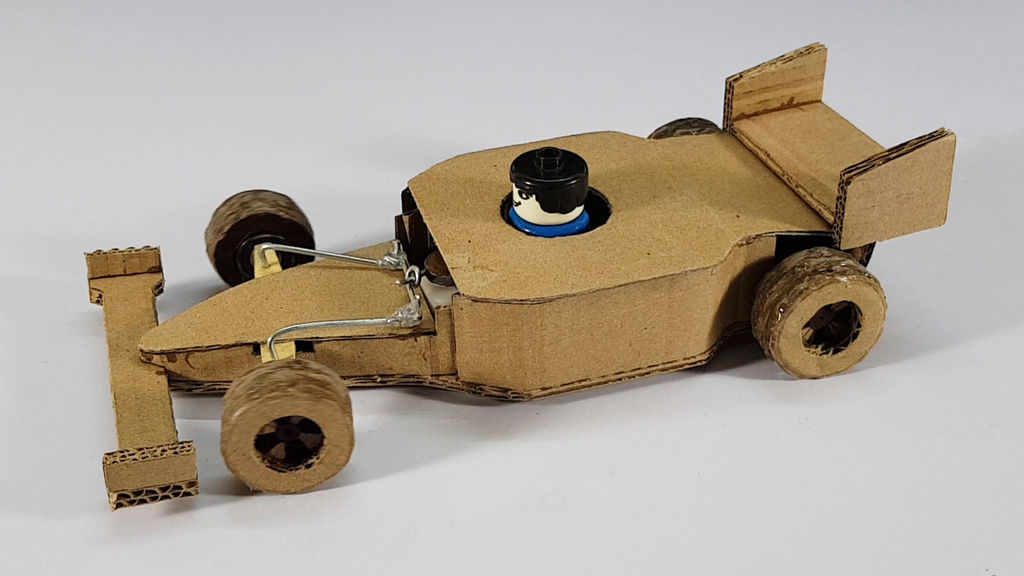
После завершения работ над кузовом, наша самодельная машинка на пульте управления готова. Подключите 5V зарядник, чтобы полностью зарядить аккумулятор. Возьмите пульт и приготовьтесь к весёлой части инструкции: видео.

Рассказываю как сделать какую-либо вещь с пошаговыми фото и видео инструкциями.
Источник
Аппаратура радиоуправления
Предлагаемый радиоприёмник предназначен для слежения за обстановкой в эфире в диапазоне 26,957 — 27,283 МГц, отведённом для радиоуправления моделями. Наличие радиопомех, создаваемых как аппаратурой радиоуправления другими моделями, так и радиопередатчиками различного назначения, работающими .
Как переделать модули радиопередатчика типа FS1000A и приемника типа XV-MR-5V для организации аналогового канала связи. Как-то возникла необходимость в передаче аналогового сигнала. Модуль передатчика FS1000A представляет собой простой однокаскадный микромощный передатчик на транзисторе Q1 .
Схема передатчика и приемника на диапазон 27МГц для работы с двухтональной кодировкой команд (DTMF), применяющаяся в телефонии, очень удобна так же и для устройства радиоуправления. Сигнал можно передать по любому аналоговому каналу связи, высокая помехозащищенность и относительная доступность .
Эта схема предназначена для управления электродвигателем модели трамвая. Модель трамвая движется по отрезку железной дороги то в одну, то в другую сторону. Еще есть стрелка и тупик в депо. Модель должна двигаться по основному отрезку пути сначала в одну сторону, затем в конце пути ударяется .
Схема подключения модулей TX118SA-4 и RX480E-4 для организации четырехканальной системы радиоуправления. Наверное, многие хотели бы дистанционно управлять различными бытовыми приборами, и самодельными устройствами. Но их останавливает сложность изготовления передатчика и приемника, необходимость .
Принципиальная схема простой КВ аппаратуры радиоуправления на 27МГц, построенной на транзисторах 9018 и микросхеме LM386. Этот радиотракт работает на частоте 27,12 МГц, его можно использовать дляпропорционального радиоуправления моделями, либо в любом случае, когда нужно передать НЧ-сигнал на .
Принципиальная схема дистанционного радиоуправления на основе китайского квартирного радиозвонка. В магазинах электротоваров можно приобрести квартирный звонок с радиоуправлением. Устройство производится в Китае, и состоит из двух модулей, питающихся от автономных источников. Один из модулей .
Принципиальная схема системы радиоуправления, построенной на основе телефона-трубки, рабочая частота — 433МГц. В конце 90-х были очень популярны телефоны-трубки, да и сейчас они повсюду продаются. Но, сотовая связь болееудобна и сейчас повсеместно вытесняет стационарную. Купленные когда-то .
Существуют игрушки — модели вездеходов, танков, луноходов, у которых есть две гусеницы или два ряда колес, работающих от отдельных электродвигателей. При этом поворот выполняется отключением одного из двигателей (с той стороны, в которую нужно повернуть). Поворот происходит резко или нужно его регулировать скачками включая — выключая сторону движителя.
Это устройство в основном предназначено для управления гаражными дверями, центральным замком в автомобиле, освещением, включением сигнализации на расстоянии и т. д. Использованные в его конструкции специализированные схемы фирмы UMC UM3758-130A позволяют установить З12 комбинаций кодов. Весь.
Источник
Система радиоуправления игрушками
Основные технические данные
Система радиоуправления позволяет дистанционно управлять игрушкой на расстоянии до 10 метров.
Рабочая частота передатчика 27,12 мГц.
Мощность передатчика в пределах 4-10 мВт.
Потребление тока передатчиком не более 20 мА.
Вес передатчика с антенной и питанием не более 150 г.
Чувствительность приемника в рабочей полосе частот не хуже 100 мкВ.
Потребление тока приемником не более 20 мА.
Вес приемника не более 70 г.
Командоаппарат обеспечивает выполнение четырех различных команд, которые повторяются периодически.
Вес командоаппарата не более 70 г.
Питание приемника и передатчика производится от батарей «Крона-ВЦ».
Принцип работы
Передатчик состоит из модулятора и генератора высокой частоты (рис.1). Модулятором передатчика служит симметричный мультивибратор, собранный на низкочастотных транзисторах VT2 и VT3 типа МП40.
Рис.1
Генератор высокой частоты собран на транзисторе VT1 типа П416 по схеме с емкостной обратной связью. При открытом транзисторе модулятора VT2 цепь генератора замыкается на плюс батареи, генератор возбуждается на рабочей частоте, сигнал высокой частоты излучается антенной.
Приемник состоит из высокочастотного каскада, усилителя низкой частоты и электронного реле.
Высокочастотный каскад приемника представляет собой сверхрегенератор. Сверхрегенератор собран на высокочастотном транзисторе VT1 типа П416 (рис.2).
Рис.2
При отсутствии сигнала на эмиттерной цепочке С5 R3 наблюдаются колебания частоты гашения. Частота гашения определяет чувствительность сверхрегенератора на его рабочей частоте и подбирается элементами С5, R3.
Командный сигнал передатчика выделяется контуром L1-С4, усиливается и детектируется сверхрегенератором. Фильтр R4-С8 пропускает сигнал команды низкой частоты на вход усилителя VT2, отделяя при этом частоту гашения более высокого порядка.
Электронное реле собрано на транзисторах VT3-VT4 типа МП40, п коллектор транзистора VT4 включено исполнительное реле КР типа РСМ-1.
Напряжение низкой частоты командного сигнала усиливается транзисторами VT3-VT4 и подается через конденсатор С13 на вы-прямительную ячейку УД1, УДЗ.
Выпрямленное напряжение через резистор R9 поступает на базу транзистора VT3. При этом эмиттерный ток транзистора VT3 резко увеличивается, транзистор VT4 открывается. Реле срабатывает, замыкая цепь питания двигателя командоаппарата.
Командоаппарат состоит из электродвигателя, храпового механизма, программного диска и распределительных скользящих контактов. Программный диск, боковая сторона которого представляет собой систему перемычек, коммутирует через распределительные скользящие контакты питание двигателей привода и других электрических элементов игрушки.
Описание электрической схемы радиоуправляемой игрушки
На схеме (рис.3) показан один из вариантов электрооборудования радиоуправляемой игрушки.
В игрушке имеются два приводных двигателя, которые обеспечивают движение вперед и повороты налево и направо. Лампочки задних фонарей игрушки служат сигналами поворота. Две фары создают эффект освещения пути движения игрушки.
Рис.3
Для приема сигналов команды от передатчика в игрушку вмонтированы приемник и Командоаппарат. Двигатель привода и командоаппарата, а также лампочки питаются от двух последовательно соединенных батарей типа 3336Л(У) (GB1). Для питания приемника служит батарея «Крона-ВЦ» (GB2). Для выключения батареи служит двухполюсный выключатель S. При поступлении сигнала команды от передатчика срабатывает реле КР, приемника и своими контактами включает электродвигатель командоаппарата (рис.4)МЗ.
Рис.4. Командоаппарат
Электродвигатель МЗ с помощью храпового механизма поворачивает программный диск на 30°, что соответствует переключению одной команды.
Программный диск через распределительные скользящие контакты включает электродвигатели привода и лампочки игрушки следующим образом:
В положении «вперед» замкнуты контакты 1, 2, 3, 4, при этом включены двигатели М1 и М2, а также лампочки Н1, Н2, НЗ, Н4.
В положении «направо» замкнуты контакты 1, 2, при этом включены двигатель М1 и лампочка НЗ.
В положении «стоп» все контакты разомкнуты.
В положении «налево» замкнуты контакты 1, 3, при этом включены двигатель М2 и лампочка Н4.
Команды меняются периодически. На схеме показана последовательность команд за один цикл.
Указания по монтажу и наладке системы
Размещение приемника в игрушке желательно производить на максимальном удалении от эл. двигателей и электромагнитов. Для защиты приемника от помех, создаваемых электродвигателями, рекомендуется включать параллельно электродвигателям электролитические конденсаторы 10-20 мкф рабочим напряжением 10-12 вольт, соблюдая полярность включения. К приемнику необходимо подключить антенну. В качестве антенны может быть использован штырь или провод диаметром 1,0-2,0 мм, длиной не менее 20 см. Антенну необходимо изолировать от корпуса игрушки. В качестве изоляторов можно использовать детали из керамики, фторопласта, оргстекла или полистирола. С увеличением длины антенны дальность управления увеличивается. Приемник необходимо закрыть крышкой из изоляционного материала для защиты от пыли и влаги. Расстояние от печатной платы до основания, на котором укреплен приемник, должно быть не менее 5 мм.
Расположение элементов на печатной плате показано на рис.5.
После монтажа электрической схемы и проверки работоспособности (порядок включения указан далее) необходимо подстроить приемник на максимальную чувствительность. Подстройка производится с помощью конденсатора С4 (см. принципиальную схему и чертеж приемника). Поворачивая ротор конденсатора изоляционной отверткой, необходимо найти положение, при котором срабатывание реле происходит при максимальном удалении игрушки ог передатчика.
Командоаппарат закрепляется на горизонтальной платформе с помощью лапок.
Источник