- Делаем игрушку гидравлический манипулятор из картона
- Рука манипулятор своими руками чертежи. Интересный робот-манипулятор на Arduino. Пробы и ошибки
- Технические характеристики результата
- Программирование
- Мелкие детали
- Описание конструкции
- Сборка в общих чертах
- Электроника
- Возможные схематические изображения результата
- Резка оргстекла
- Общие сведения
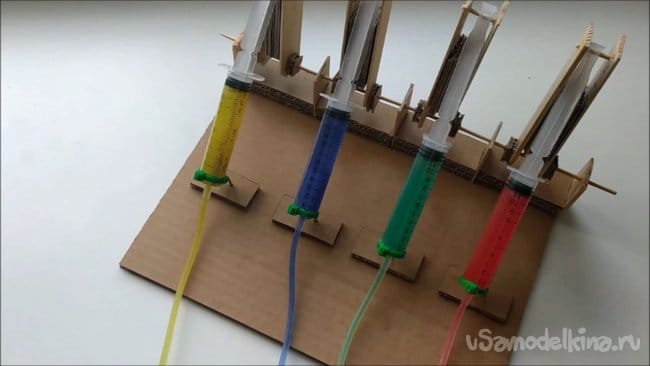
Делаем игрушку гидравлический манипулятор из картона

Здравствуйте уважаемые любители самоделок! Решил порадовать племянника и собрать ему достаточно интересную игрушку. Заодно и Вам рассказать. Пример работы манипулятора Вы можете посмотреть на видео ниже, так же, в нём я постарался максимально подробно показать процесс сборки:
И так, нам понадобится: картон, 8 шприцов,трубочки от капельницы, пару кусков проволоки, деревянные линейки либо палочки от мороженого, 16 хомутиков, супер-клей, термопистолет и зубочистки, или так называемые деревянные шпажки.
Я изготавливал *на глаз* и все размеры брал из головы. Поэтому Вы так же можете изготовить любых размеров.
Для тех, кто заинтересуется изготовлением, сделал сделал чертёж с размерами моих деталей.
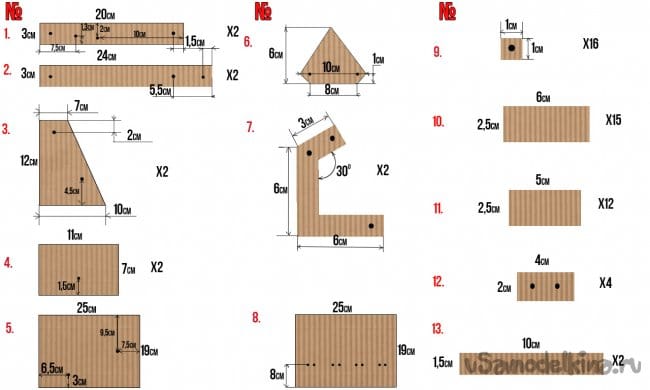
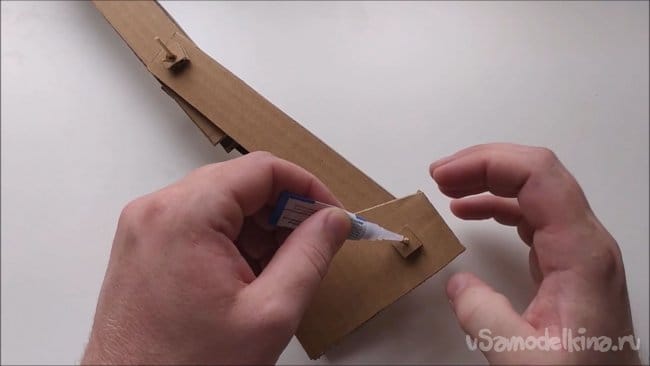
Соединяем детали №1, №2 и №3 между собой с помощью зубочисток и четырёх деталей №9. Расстояние между ними должно быть такое, что бы свободно помещался шприц. Проклеиваем соединения супер-клеем.
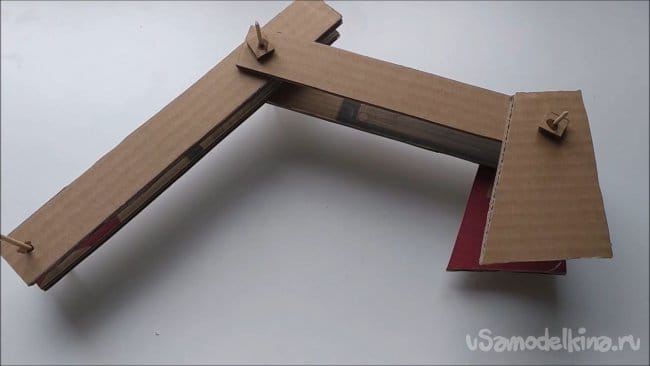
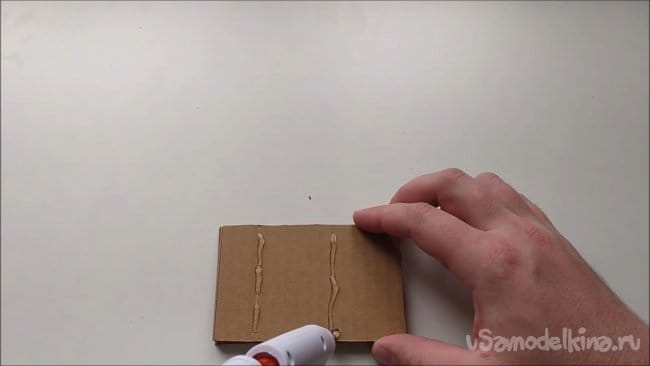
Склеиваем детали №4 между собой. И приклеиваем к ним собранную ранее конструкцию:

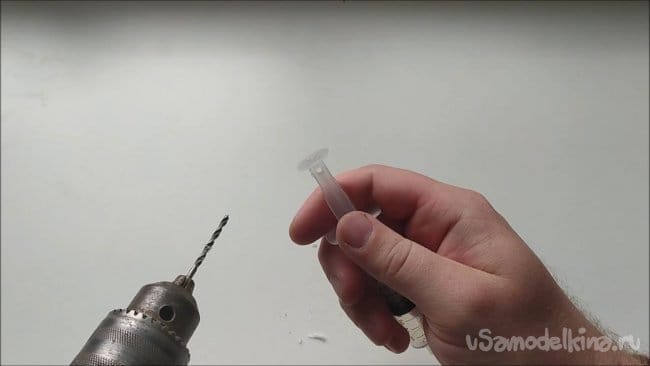
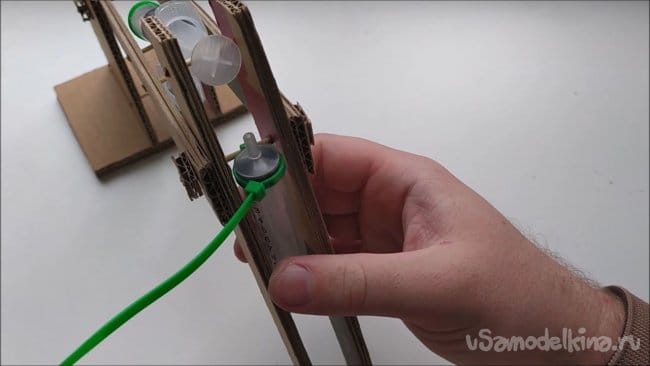
Берём шприцы ( я взял 12мл), сверлим в каждом из нём отверстие как на скриншоте. И зажимаем на семи из них, по два хомутика
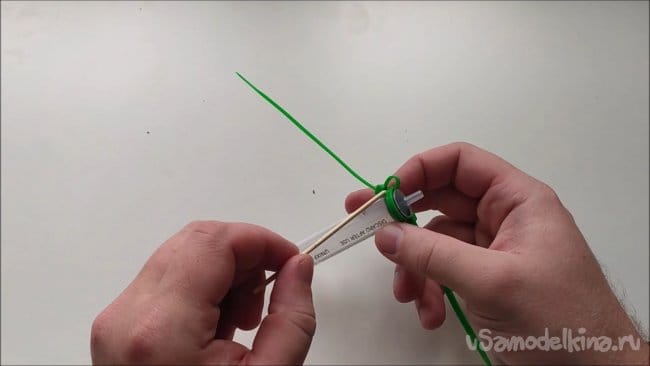
Прикрепляем с помощью зубочисток первые два шприца как показано на фото:
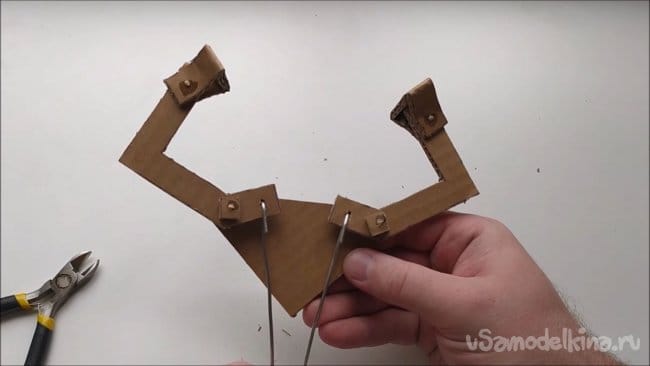
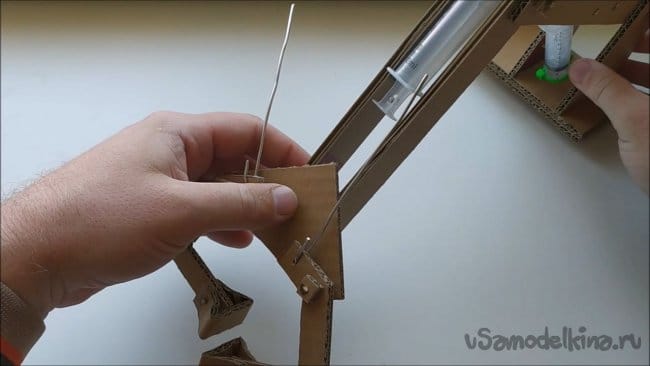
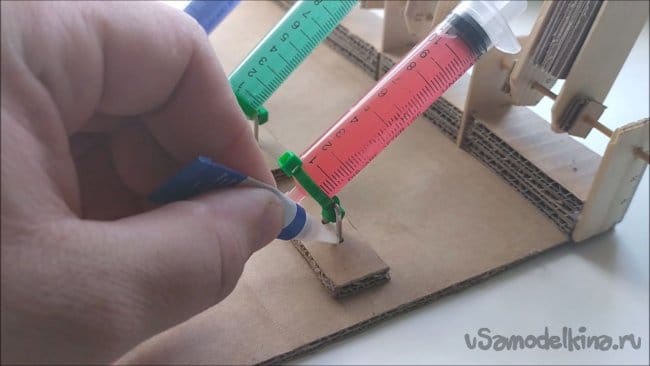
Берём детали №6, №7, №9 и №13, пару кусков проволоки. И изготавливаем вот такой захват:
На соединительную зубочистку между деталями №1 и №2 зацепляем 2 хомутика и зажимаем шприц. Приклеиваем захват к деталям №1. :В отверстие шприца вставляем окончания проволоки идущие от захвата, и загибаем

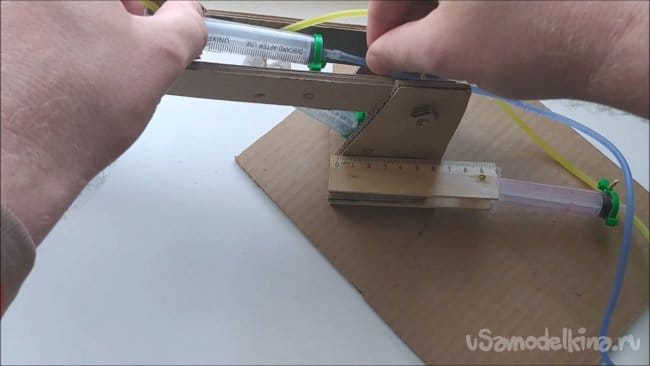
Берём деталь №5, вставляем в отверстие зубочистку, проклеиваем и устанавливаем наш манипулятор, через отверстие в детали №4. Фиксируем, проклеиваем.


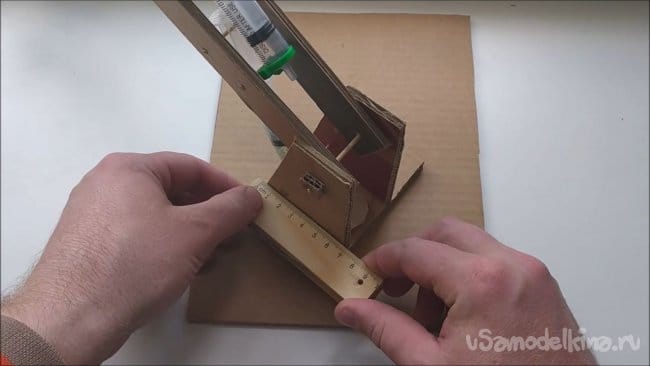
Далее склеиваем между собой три детали №10 и приклеиваем к ним две половинки линейки или две палочки от мороженого. Приклеиваем это сбоку детали №4. Соединяем с одним шприцом. Это будет поворотный механизм.

Соединяем между собой детали №11 по три штуки и приклеиваем к ним сверху и снизу кусочки линейки ( в моём случае). Таким методом делаем четыре рычага. Далее на деталь №8 приклеиваются детали №10, склеенные по три. Между ними так же приклеиваются кусочки линейки с отверстиями. В отверстия вставляется палочка и устанавливаются рычаги. Затем приклеиваются детали №12 и скобы.
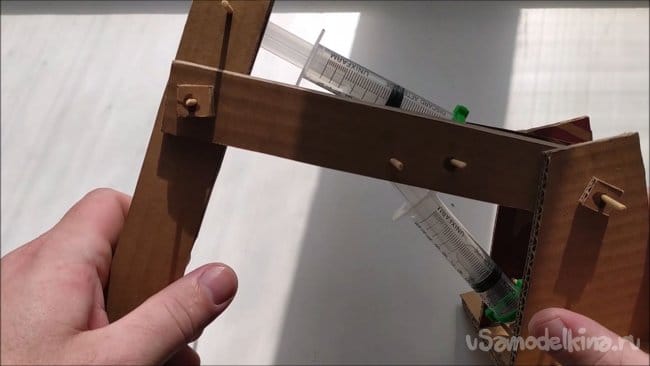
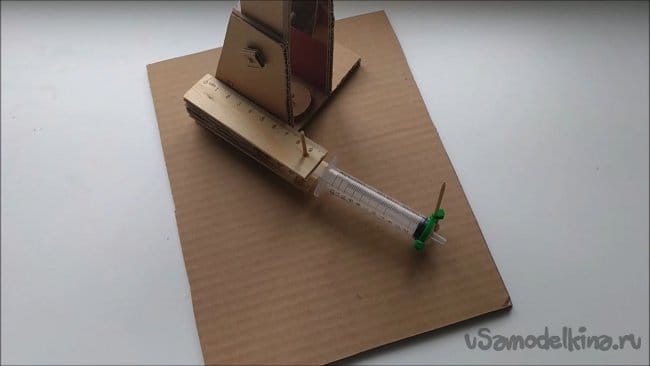
Устанавливаются шприцы. В шприцы я набрал воды разведённой с краской, что бы было проще ориентироваться какой рычаг, каким узлом управляет. Всё проклеивается.
Ну вот и всё, готово! Всем спасибо за внимание и хорошего настроения!
Источник
Рука манипулятор своими руками чертежи. Интересный робот-манипулятор на Arduino. Пробы и ошибки

Технические характеристики результата
Будет рассматриваться образец с параметрами длины/высоты/ширины соответственно 228/380/160 миллиметров. Вес руки-манипулятора, своими руками сделанной, будет составлять примерно 1 килограмм. Для управления используется проводной дистанционный пульт. Ориентировочное время сборки при наличии опыта – около 6-8 часов. Если его нет, то могут уйти дни, недели, а при попустительстве и месяцы, чтобы была собрана рука-манипулятор. Своими руками и одному в таких случаях стоит делать разве что для своего собственного интереса. Для движения составляющих используются коллекторные моторы. Приложив достаточно усилий, можно сделать прибор, который будет поворачиваться на 360 градусов. Также для удобства работы, кроме стандартного инструментария вроде паяльника и припоя, необходимо запастись:
- Удлинёнными плоскогубцами.
- Боковыми кусачками.
- Крестовой отверткой.
- 4-мя батарейками типа D.
Пульт дистанционного управления можно реализовать, используя кнопки и микроконтроллер. При желании сделать дистанционное беспроводное управление элемент контроля действий понадобится и в руке-манипуляторе. В качестве дополнений необходимы будут только устройства (конденсаторы, резисторы, транзисторы), которые позволят стабилизировать схему и передавать по ней в нужные моменты времени ток необходимой величины.
Программирование
Самое интересное, это управление манипулятором с компьютера. У uArm есть удобное приложение для управления манипулятором и протокол для работы с ним. Компьютер отправляет в COM-порт 11 байт. Первый из них всегда 0xFF, второй 0xAA и некоторые из оставшихся — сигналы для сервоприводов. Далее эти данные нормализуются и отдаются на отработку двигателям. У меня сервоприводы подключены к цифровым входам/выходам 9-12, но это легко можно поменять.
Терминальная программа от uArm позволяет изменять пять параметров при управлении мышью. При движении мыши по поверхности изменяется положение манипулятора в плоскости XY. Вращение колесика — изменение высоты. ЛКМ/ПКМ — сжать/разжать клешню. ПКМ + колесико — поворот захвата. На самом деле очень удобно. При желании можно написать любой терминальный софт, который будет общаться с манипулятором по такому же протоколу.
Я не буду здесь приводить скетчи — скачать их можно будет в конце статьи.
Мелкие детали
Для регуляции количества оборотов можно использовать переходные колесики. Они позволят сделать движение руки-манипулятора плавными.
Также необходимо позаботится о том, чтобы провода не усложняли её движения. Оптимальным будет проложить их внутри конструкции. Можно сделать всё и извне, такой подход сэкономит время, но потенциально может привести к сложностям в перемещении отдельных узлов или всего устройства. А теперь: как сделать манипулятор?
Описание конструкции
Автором этой разработки является deGHIZmo, пользователь сайта Thingiverse. Вот сама страница проекта. Также он подготовил достаточно подробную инструкцию по сборке. Со своей стороны мы отметили высокую заинтересованность аудитории нашего сайта к нашему проекту большого манипулятора из оргстекла (часть 1, часть 2, часть 3) и решили адаптировать материалы по миниатюрного манипулятора для пользователей нашего ресурса. В частности, в этой статье вы сможете найти список необходимых материалов для сборки, файлы для скачивания и подробную инструкцию.
Миниатюрный манипулятор Общий вид
Сборка в общих чертах
Теперь приступаем непосредственно к созданию руки-манипулятора. Начинаем с основания. Необходимо обеспечить возможность поворота устройства во все стороны. Хорошим решением будет его размещение на дисковой платформе, которая приводится во вращение с помощью одного мотора. Чтобы она могла вращаться в обе стороны, существует два варианта:
- Установка двух двигателей. Каждый из них будет отвечать за поворот в конкретную сторону. Когда один работает, второй пребывает в состоянии покоя.
- Установка одного двигателя со схемой, которая сможет заставить его крутится в обе стороны.
Какой из предложенных вариантов выбрать, зависит исключительно от вас. Далее делается основная конструкция. Для комфорта работы необходимо два «сустава». Прикреплённый к платформе должен уметь наклоняться в разные стороны, что решается с помощью двигателей, размещённых в его основании. Ещё один или пару следует разместить в месте локтевого изгиба, чтобы часть захвата можно было перемещать по горизонтальной и вертикальной линии системы координат. Далее, при желании получить максимальные возможности, можно установить ещё двигатель в месте запястья. Далее наиболее необходимое, без чего не представляется рука-манипулятор. Своими руками предстоит сделать само устройство захвата. Тут существует множество вариантов реализации. Можно дать наводку по двум самым популярным:
- Используется только два пальца, которые одновременно сжимают и разжимают объект захвата. Является самой простой реализацией, которая, правда, обычно не может похвастаться значительной грузоподъёмностью.
- Создаётся прототип человеческой руки. Тут для всех пальцев может использоваться один двигатель, с помощью которого будет осуществляться сгиб/разгиб. Но можно сделать и конструкцию сложней. Так, можно к каждому пальцу подсоединить по двигателю и управлять ими отдельно.
Далее остаётся сделать пульт, с помощью которого будет оказываться влияние на отдельные двигатели и темпы их работы. И можно приступать к экспериментам, используя робот-манипулятор, своими руками сделанный.
Электроника
Чтобы заставить руку работать достаточно всего навсего подключить пять сервоприводов к Arduino и подать на них питание с хорошего источника. У uArm использованы какие-то двигатели с обратной связью. Я поставил три обычных двигателя MG995 и два маленьких двигателя с металлическим редуктором для управления захватом.
Тут мое повествование тесно сплетается с предыдущими проектами. С некоторых пор я начал преподавать программирование Arduino и для этих целей даже подготовил свою Arduino-совместимую плату. С другой стороны как-то раз мне подвернулась возможность дешево изготовить платы (о чем я тоже писал). В итоге все это закончилось тем, что я использовал для управления манипулятором свою собственную Arduino-совместимую плату и специализированный шилд.
Этот шилд на самом деле очень простой. На нем четыре переменных резистора, две кнопки, пять разъемов для сервопривода и разъем питания. Это очень удобно с точки зрения отладки. Можно загрузить тестовый скетч и записать какой-нибудь макрос для управления или что-нибудь вроде того. Ссылку для скачивания файла платы я тоже дам в конце статьи, но она подготовлена для изготовления с металлизацией отверстий, так что мало пригодна для домашнего производства.
Возможные схематические изображения результата
Рука-манипулятор своими руками предоставляет широкие возможности для творческих измышлений. Поэтому предоставляются вашему вниманию несколько реализаций, которые можно взять за основу для создания своего собственного устройства подобного предназначения.
Любая представленная схема манипулятора может быть усовершенствована.
Резка оргстекла
Мы заказываем резку оргстекла в компании, находящейся недалеко от Екатеринбурга. Они делают быстро, качественно и не отказываются от небольших заказов. Стоить резка таких деталей будет около 800 рублей. В результате вы получите вырезанные детали с обоих сторон которых находится полиэтиленовая пленка. Эта пленка нужна для защиты материала от образования окалины.
Деталь из оргстекла с пленкой
Эту пленку необходимо удалить с обоих сторон.
Деталь без пленки
Еще мы заказали гравировку на поверхности некоторых деталей. Для гравировки достаточно просто нарисовать изображение на отдельном слое и указать это при заказе. Места гравировки необходимо зачистить зубной щеткой и затереть пылью. Получилось очень неплохо:
Гравировка на оргстекле
В итоге после удаления пленки и затирки у нас получилось вот это:
Общие сведения
Итак, все джойстики можно классифицировать по разным основаниям, из них актуальны для нас способ подключения и тип датчиков.
По способу подключения джойстики подразделяются на джойстики с USB подключением и Game Port подключением. Можно ли самостоятельно сделать с нуля джойстик на USB мне неведомо, однако я полагаю, что это если и возможно, то только высококвалифицированным радиоинженерам. Иное дело переделать готовый USB джойстик под свой вкус и свои потребности. Это доступно практически каждому, умеющему держать в руках паяльник. Сделать с нуля джойстик на Game Port несложно, и вполне по силам каждому человеку, умеющему и любящему возиться с пластмассовыми и железными цацками.
Источник