- Универсальный «ИК-бампер» myTSOPer.
- Блок-схема ИК-бампера.
- Принципиальная схема ИК-бампера.
- roboforum.ru
- Разработка Open Robotics: ИК-бампер
- Разработка Open Robotics: ИК-бампер
- Re: Разработка Open Robotics: ИК-бампер
- Re: Разработка Open Robotics: ИК-бампер
- Re: Разработка Open Robotics: ИК-бампер
- Re: Разработка Open Robotics: ИК-бампер
- Re: Разработка Open Robotics: ИК-бампер
- Re: Разработка Open Robotics: ИК-бампер
- Re: Разработка Open Robotics: ИК-бампер
- Re: Разработка Open Robotics: ИК-бампер
- Re: Разработка Open Robotics: ИК-бампер
- Re: Разработка Open Robotics: ИК-бампер
- Re: Разработка Open Robotics: ИК-бампер
- Re: Разработка Open Robotics: ИК-бампер
- Re: Разработка Open Robotics: ИК-бампер
- Re: Разработка Open Robotics: ИК-бампер
- Попытка сделать простой ИК-бампер робота
- Продолжение проектирования датчиков- массив датчиков
Универсальный «ИК-бампер» myTSOPer.
В статье «Всё об ИК-приёмнике «TSOP»» мы ознакомились с работой приёмников ИК-сигналов типа «TSOP». В конце статьи кратко была затронута тема создания бесконтактного датчика на основе TSOP. Теперь рассмотрим одну из возможных схем такого датчика, который можно будет использовать в качестве ИК-бампера на простейшем роботе.
Для начала ещё раз вспомним требования для правильной и безотказной работы TSOP-приёмников:
— Инфракрасное излучение должно производится на «родной» частоте TSOP приёмника.
— ИК-свет должен излучаться пачками примерно по 20 импульсов.
— Из документации на TSOP-приёмник известно, что он должен быть запитан через RC-фильтр.
— Длина волны ИК-излучения должна соответствовать длине волны TSOP-приёмника.
На основе этих требований составим сначала блок схему, а затем и принципиальную схему бесконтактного бампера на ИК-лучах.
Блок-схема ИК-бампера.
При составлении любой электронной схемы нужно постараться разбить её на более мелкие взаимодействующие части.
Основные блоки нашей схемы — это генератор импульсов «родной» (или «несущей») частоты ИК-излучения и генератор, формирующий пачки импульсов. Обозначим их условно прямоугольниками (Рис. 1). Частота генерируемых импульсов несущей частоты должна быть равна «родной» частоте выбранного TSOP-приёмника. Формирующий генератор пачек имеет импульсы, длина которых должна быть в 20 раз длиннее периода импульсов несущей частоты; на практике частоту формирующего генератора можно выбрать около 1200 Герц (на слух такая частота воспринимается как писк средней высоты). С помощью этих двух генераторов мы будем формировать пачки импульсов ИК-излучения.
Из статьи «Всё об ИК-приёмнике «TSOP»» можно узнать, что при появлении в зоне чувствительности TSOP-приёмника ИК-излучения в виде пачек импульсов, на выходе TSOP-приёмника будут появляться импульсы, которые представляют собой демодулированные пачки ИК-импульсов.
Но для обработки сигнала с датчика препятствия лучше всего подходят два устойчивых состояния сигнала: сигнал «есть препятствие» и сигнал «нет препятствия». Поэтому необходимо каким то образом преобразовать последовательность импульсов на выходе TSOP-приёмника в устойчивый логический уровень, то есть нужно расширить импульсы. Для этого применяют расширитель импульсов или по-другому — одновибратор.
| Одновибратор — электронная схема (устройство) для вырабатывания запускающим действием одиночного импульса с заданной длительностью. Одновибратором ещё называют «ждущий мультивибратор» (устар.) |
Запускающим действием для одновибратора может быть короткий импульс или лишь переход одного логического состояния в другое, то есть одновибратор будет запускаться фронтом или спадом импульса (Рис.3). Существуют схемы с управляющим входом разрешения работы одновибратора и с «перезапуском» — когда формирование импульса перезапускается до его окончания по-новому. Длина формируемого одновибратором импульса должна быть немного дольше периода частоты пачек импульсов, что бы перезапуск одновибратора произошёл ещё до окончания одного импульса.
Теперь соберём все части блок-схемы вместе и добавим коммутатор, который будет коммутировать (включать и выключать) импульсы несущей частоты в такт с импульсами генератора пачек (Рис.4).
Так как запуск одновибратора по спаду импульса на выходе TSOP может происходить лишь в моменты отправки пачки ИК-импульсов, то разрешение запуска одновибратора можно взять от генератора пачек. Таким образом запуск одновибратора произойдёт лишь в тот момент, когда будет послана только для него предназначенная пачка ИК-импульсов, и ложные срабатывания бампера значительно сократятся.
После того как блок схема составлена, можно перейти к составлению принципиальной электрической схемы.
Принципиальная схема ИК-бампера.
Для начала выберем детали схемы, которые бы подошли для поставленной задачи.
Для генераторов можно взять микросхему универсального таймера NE555 (Отечественный аналог КР1006ВИ1). Но так как в схеме требуется два генератора, то лучше взять микросхему NE556, которая представляет собой сдвоенную версию NE555.
Так как выходной ток у таймера NE555/NE556 может достигать 200 мА, то никаких усилительных транзисторов для ИК-светодиодов не требуется.
ИК-светодиоды в нашей схеме мы включим между выходами генератора несущей частоты и выходом генератора пачек. Такая схема включения называется мостовой. При этом надобность в отдельном коммутаторе отпадёт.
Блок одновибратора с перезапуском можно построить на микросхеме К155АГ3/К555АГ3 (аналог 74LS123). В этой микросхеме содержится сразу два идентичных одновибратора с возможностью перезапуска и комплиментарным выходом (имеется как прямой, так и инверсный выход).
Так как часто ИК-бамперы используются по два, для распознавания препятствия с двух сторон, стоит сразу же создавать сдвоенный бампер препятствий. Тем более, что применённые микросхемы это позволяют, и не требуется много дополнительных деталей.
Начертим теперь полную схему получившегося ИК-бампера, Рис. 5:
| R1* — 68 Ом R2, R12 — 27 k R3 — 5,1 k R4, R8 — 1 k R5, R6 — 80..150 Ом R7* — 16 k R9 — 75 Ом C1 — 0,01 мкФ | C5, C11, C12 — 0,1 мкФ C2 — 1000 пФ С3, C4 — 4,7..5 мкФ / 10В C6 — 20..50 мкФ / 15В IC1 — NE556 IC2 — 74LS123 (K555АГ3) TSOP1, TSOP2 — TSOP4840, TSOP4836, TSOP4838 LED1A, .. LED2B — TSAL6200 или аналогичные (R1*, R7*, R9* — элементы для настройки) |
Для увеличения ширины зоны «действия» ИК-бампера применены по два ИК-светодиода для каждого канала.
Генератор несущей частоты (40 кГц) собран на элементах R4, R7 , C2 и на половинке микросхемы NE556, на второй половинке этой микросхемы и на R3, R8, C1 собран генератор для формирования пачек импульсов (1,3 кГц). Резистором R7 необходимо настроить несущую частоту на использумые TSOP-приёмники. Резисторами R1 и R9 можно точно настроить «дальность» действия левого или правого бампера.
Всю схему можно собрать на печатной плате размером 100х25 мм (Рис. 6).
Для робота с двумя моторами потребуется лишь драйвер мотора (например L293D, или даже на двух транзисторах) для того, что бы заставить робота избегать препятствий:
Видео 1. Простейший робот с ИК-бампером myTSOPer.
Смелых и Удачных Экспериментов.
Дополнения и файлы:
Источник
roboforum.ru
Технический форум по робототехнике.
- Список форумов‹Тематические разделы‹Open Robotics‹Разработка модулей
- Изменить размер шрифта
- Версия для печати
- Магазин
- Правила
- Wiki
- FAQ
- Регистрация
- Вход
Разработка Open Robotics: ИК-бампер
Разработка Open Robotics: ИК-бампер
=DeaD= » 05 апр 2009, 00:15
Собственно полуэконом, но в любом случае он будет грузить процессор МК при работе, зато экстремально дешевый будет и можно будет поставлять в варианте для самостоятельной сборки, причем скорее всего наборами по 2-4-6 штук.
Добавлено спустя 26 секунд:
Габариты — 23х15мм
Добавлено спустя 1 час 30 минут 10 секунд:
Подумал немного и убрал слово «Эконом»  просто ИК-бампер
просто ИК-бампер
Так как TSOP-1736 работает на длине волны 940нМ, то и ИК-диоды пока попробуем юзать L-7113F3BT, а вообще нужно любые ИК-диоды с буковками F3 — это с нужной длиной волны 940нМ, например, L-34F3C или L-53F3C еще есть.
PS: Заметка для себя — Диоды tsal-ы с углом рассеивания:
5100 — 10гр
4400 — 25гр
6200 — 17гр
Re: Разработка Open Robotics: ИК-бампер
Duhas » 05 апр 2009, 14:40
Re: Разработка Open Robotics: ИК-бампер
=DeaD= » 05 апр 2009, 15:09
Re: Разработка Open Robotics: ИК-бампер
Duhas » 05 апр 2009, 16:59
Re: Разработка Open Robotics: ИК-бампер
=DeaD= » 05 апр 2009, 17:23
Re: Разработка Open Robotics: ИК-бампер
blindman » 10 апр 2009, 09:18
Re: Разработка Open Robotics: ИК-бампер
=DeaD= » 10 апр 2009, 11:57
Re: Разработка Open Robotics: ИК-бампер
blindman » 10 апр 2009, 11:59
Re: Разработка Open Robotics: ИК-бампер
=DeaD= » 10 апр 2009, 12:09
Re: Разработка Open Robotics: ИК-бампер
=DeaD= » 11 апр 2009, 13:59
Re: Разработка Open Robotics: ИК-бампер
=DeaD= » 02 май 2009, 23:03
Залип с бампером  ((
((
Вот в этом коде (этот код уже устарел, актуальный см. ниже):
Код: Выделить всё • Развернуть
Если в конце убрать задержку 50мс то всё работает, т.е. если проверка бампера идёт постоянно без остановки — тогда всё работает, но стоит вызывать проверку бампера 20 раз в секунду и всё, нифига не работает ((
Добавлено спустя 14 минут 42 секунды:
При чем начинает нормально работать не сразу. Такое ощущение что внутри какой-то кондёр при приёме импульсов заряжается и потом нормально работает.
Добавлено спустя 1 минуту 11 секунд:
Поправка, если долго закрывать бампер то оно тоже через некоторое время будет считать что препятствия нет
Re: Разработка Open Robotics: ИК-бампер
=DeaD= » 03 май 2009, 11:02
Re: Разработка Open Robotics: ИК-бампер
MiBBiM » 03 май 2009, 12:03
«Рабочий» сигнал должен отвечать следующим требованиям:
- быть возможно ближе к частоте несущей для данной модели (например, 36 кГц для TSOP1736)
- в пачке должно быть 10 или более импульсов
- за пачкой от 10 до 70 импульсов должна следовать пауза длительностью не менее 14 импульсов
а у вас задержка меньше 14ти импульсов.
Добавлено спустя 21 минуту 24 секунды:
кстати, зачем каждый импульс вычислять значение задержки?
лучше
Код: Выделить всё • Развернуть
Код: Выделить всё • Развернуть
Re: Разработка Open Robotics: ИК-бампер
=DeaD= » 03 май 2009, 12:11
Re: Разработка Open Robotics: ИК-бампер
MiBBiM » 03 май 2009, 13:25
Источник
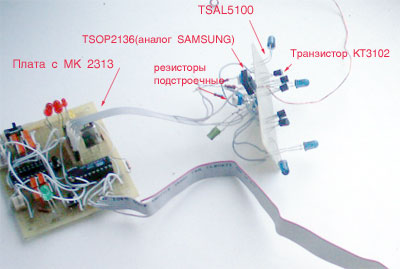
Попытка сделать простой ИК-бампер робота
| 12.07.2010, 19:54 Я достаточно долго экспериментировал с различными типами «ИК-бамперов» и пришел к тому же выводу, что и зарубежные любители робототехники: ИК-датчики несовершенны. На их работу влияет множество факторов и сделать хороший, качественный датчик весьма непросто, а иногда даже дороговато. Конечно, «у них» можно купить датчик расстояния SHARP и использовать его без каких-либо доработок – он показывает расстояние до объекта и этого достаточно для робота. Поэтому в разработках используется сразу несколько видов датчиков, а именно: ИК-датчик в качестве «бампера», ультразвуковой сонар для определения дальних расстояний и датчик поворота колеса (encoder) для определения пройденного расстояния.
Краткое описание: ИК- светодиод светится постоянно. ИК- фототранзистор подключен ко входу компаратора. Отрегулировав подстроечным резистором напряжение на положительном входе компаратора, можно добиться того, что датчик будет срабатывать при приближении к препятствию. НО! На работу схемы влияют множество внешних факторов. Чтобы обойти эту проблему я использовал все компараторы, которые находятся в одной микросхеме LM339. Теперь падение напряжения на ИК-фототранзисторе оценивают 4 компаратора, с разным напряжением сравнения. В итоге схема может достаточно гибко реагировать на окружающую среду и различные виды препятствий. Продолжение проектирования датчиков- массив датчиковВот, сделал попытку собрать массив датчиков.
Номиналы я не ставлю, потому что пока экспериментирую и практически везде стоят подстроечные. Плата датчиков подключается к плате МК. Программно генерируются импульсы, отслеживаются ответы. Я пробовал разные алгоритмы, пока остановился на том. что программа выдает пачки по 8 импульсов с паузой, количество пачек- 10, потом переходит к следующему датчику, и так по кругу. По моим расчётам, это занимает много времени и скорее всего придется или ставить отдельный МК на работу с датчиками, или ставить другие схемы- генератор (555) + сдвиговый регистр + логические элементы+буферный элементы (240) вместо транзисторов, может даже шифратор. С ноги МК можно снять синхронизирующие импульсы. Источник |