Транцевый интерцептор для лодки своими руками
Экономия топлива, которую можно получить, установив на мотолодку или катер интерцепторы (см. «КиЯ» №106, №111, №114), побудила многих наших читателей искать эти немудреные приспособления, цена которым 6 рублей, в торговой сети. К сожалению, их поиски до сего дня остаются тщетными: промышленность, судя по всему, осваивать интерцепторы в серийном производстве не торопится. В редакции уже появились сообщения об испытаниях лодок с интерцепторами, изготовленными самостоятельно.
Например, ленинградец Н. Звендинов установил самодельные интерцепторы на мотолодку «Москва-2». Как показал опыт эксплуатации лодки в течение навигации, ее скорость при использовании интерцепторов возросла в среднем на 3 км/ч, расход горючего на 100 км пути снизился примерно на 10%.
Звендинов прислал в редакцию эскизы интерцепторов, пользуясь которыми их могут изготовить и другие владельцы мотолодок. Естественно, придется изменить длину интерцепторов соответственно ширине днища по транцу и учесть, что кромка интерцептора не должна выступать ниже днища более, чем на 1% ширины по скуле у транца. Например, для мотолодки «Москва-2» эта величина составляет 17 мм, для «Нептуна-3» — 14 мм, для «Крыма-3» — 15 мм. Но это предельные значения, а оптимальные следует уточнить испытаниями лодки при нескольких вариантах загрузки мотолодки (имеется в виду водоизмещение и относительная центровка — положение общего центра тяжести от транца). Стоит потратить день на несколько пробегов лодки с разной нагрузкой и положением интерцепторов на мерной линии, чтобы в дальнейшем быть уверенным в положительном эффекте их использования.
Напомним, что интерцепторы обеспечат заметный рост скорости и сокращение расхода горючего лишь для судов, которые эксплуатируются в режиме близ «горба» на кривой сопротивления. При правильно подобранном гребном винте такие лодки идут с чрезмерным дифферентом на корму и перераспределение нагрузки (перенос основных тяжестей в нос) не дает нужного эффекта перехода в чистое глиссирование. На лодках с явно носовой центровкой и таких как «Прогресс» или «Крым» интерцепторы не нужны. Материал для изготовления интерцепторов должен быть стойким к коррозии. Лучше всего пластины сделать из алюминиево-магниевого сплава, а крепеж из нержавеющей стали.
Источник
Что такое транцевый интерцептор?
Краткое сообщение об интерцепторах, которое появилось в статье «С прицелом на будущее» («КЯ» №106), вызвало живой интерес читателей. «Расскажите, пожалуйста, поподробнее об этой интересной новинке», — такая просьба содержится во многих письмах. Некоторые из них заканчиваются словами: «Помогите купить интерцепторы!»
Подавляющее большинство любителей привлекла обещанная в статье возможность существенной экономии топлива с помощью этого простого устройства.
Интерцепторы дают возможность поддерживать оптимальный ходовой дифферент — угол атаки днища к горизонту воды — в основном при выходе на глиссирование и при движении в режимах, близких к переходному.
Вообще активное управление посадкой судна, как известно, является одним из резервов повышения скорости и, соответственно, экономии горючего. Как показывает опыт, в отдельных случаях только благодаря управлению посадкой удается повысить скорость на 15—20%. На практике чаще всего это осуществляется при помощи транцевых плит (которые могут быть фиксированными, регулируемыми, управляемыми, автоматическими), но может быть применено и управление наклоном оси гребного винта, при помощи осушаемых цистерн водяного балласта и т. д. Этой теме неоднократно посвящались публикации в журнале (см. например, статьи: «О ходовом дифференте катера», «КЯ» №6; «Управляемые транцевые плиты на катере «Баргузин»», «КЯ» №82; «Управление дифферентом глиссирующего катера» — «КЯ» №87).
Интерцепторы в данном случае не являются принципиально новым устройством; их действие по физическому смыслу близко к работе транцевых плит. Конструктивно интерцепторы, конечно, более просты и доступны в изготовлении даже рядовому любителю.
Следует лишь помнить, что интерцепторы, как и транцевые плиты, не могут быть панацеей от всех бед. По-прежнему надо внимательно следить за всеми условиями эксплуатации судна и в первую очередь — за соответствием гребного винта нагрузке. Только правильно подобранный винт, имеющий оптимальные для данных условий характеристики, способен эффективно использовать всю мощность двигателя. Без этого ожидать чудес от установки интерцепторов нельзя.
Публикуемая ниже статья более подробно знакомит читателей с этим интересным устройством, дает практические рекомендации по установке их на конкретные модели мотолодок.
В заключение отметим, что промышленность приступает к серийному изготовлению интерцепторов (стоимость комплекта — 6 руб.).В продаже уже появилась мотолодка «Москва-4», на которой установлено это устройство, благодаря чему мотолодку можно эксплуатировать не с двумя, а с одним мотором «Вихрь-30» без ощутимой потери скорости.
При установке транцевых интерцепторов 1 — плоских пластин, расположенных в плоскости транца и выступающих ниже кормового обреза днища на 0,5—1,0 % ширины днища по скуле, происходит местное повышение гидродинамического давления на днище в результате торможения потока. Равнодействующая этих дополнительных сил динамического давления воды создает момент, дифферентующий глиссирующее судно на нос; под ее действием корпус немного подвсплывает. Благодаря этим факторам применение интерцепторов при определенных условиях позволяет снизить общее сопротивление воды движению судна.
Главный эффект — это значительное уменьшение угла ходового дифферента, приближающее его к оптимальному значению. Это определяет диапазон скоростей хода, в котором транцевые интерцепторы дают положительный эффект.
В водоизмещающем режиме движения — на малых скоростях — избыточное гидродинамическое давление перед интерцептором невелико; лодка идет при этом лишь с небольшим дифферентом на корму, а иногда даже на нос. Интерцепторы являются выступающими частями и, естественно, создают дополнительное сопротивление движению судна. Таким образом, на водоизмещающем судне транцевые интерцепторы не нужны.
В переходном к глиссированию режиме, при относительно высоких скоростях, возникает повышенный ходовой дифферент на корму и, как следствие, сопротивление воды движению судна резко возрастает. На графике зависимости сопротивления от скорости участок, соответствующий этому режиму, легко обнаружить в виде так называемого «горба» сопротивления. На этих скоростях перед интерцептором образуется область повышенного динамического давления, что сопровождается положительным эффектом уменьшения угла ходового дифферента и снижения волнового сопротивления, несмотря на дополнительное сопротивление самих интерцепторов как выступающих частей. Как показали натурные эксперименты, снижение сопротивления воды движению лодки в районе «горба» может составить от 10 до 30%.
Когда же катер достигает режима чистого глиссирования и идет с малыми углами дифферента, интерцепторы становятся излишними. Возникающий на них дифферентующий момент «прижимает» нос катера к воде; в результате увеличивается смоченная длина судна, повышается волно- и брызгообразование в носовой оконечности, резко возрастает полное сопротивление. Скорость лодки, как следствие этого, падает.
Таким образом, положительный эффект от применения транцевых интерцепторов следует ожидать лишь в сравнительно узком диапазоне скоростей лодки — от начальной стадии переходного режима до начальной стадии глиссирования, т. е. в области «горба» на кривой сопротивления (рис. 1).
Очевидно, что для различных случаев нагрузки и центровки одного и того же глиссирующего судна требуется различный по величине дифферентующий момент для поддержания оптимального ходового дифферента. В связи с этим представляются наиболее перспективными интерцепторы с регулируемой рабочей высотой, которая может фиксироваться на стоянке — перед выходом в плавание — или на ходу.
В зависимости от способа установки рабочей высоты интерцепторы могут быть регулируемыми и управляемыми. Управляемые интерцепторы снабжаются дистанционным приводом, обеспечивающим их подъем на полном ходу мотолодки.
Кривые буксировочного сопротивления мотолодок могут иметь или явно выраженный «горб» (кривая R; рис. 1, а), когда с повышением скорости лодки сопротивление сначала растет, затем уменьшается и вновь возрастает, или вид перегибающейся кривой (рис. 1, б) с пологим участком графика.
При избыточной тяге Т2 гребных винтов (например, при двух подвесных моторах или при малой нагрузке) мотолодка свободно преодолевает «горб» сопротивления и легко выходит на глиссирование; в таком случае интерцепторы не нужны. Мотолодка может развить скорость v4, когда тяга винтов и сопротивление воды движению достигают равных величин.
Если на той же мотолодке будет установлен мотор меньшей мощности, тяга винта соответственно будет меньше и мотолодка сможет достичь лишь скорости v3, которая заметно ниже v4. Правда, при условии, если удастся преодолеть «горб» сопротивления; в противном случае лодка на глиссирование не выйдет и будет идти на «горбе» с низкой скоростью v1.
Транцевые интерцепторы позволяют снизить максимальное сопротивление на «горбе» (кривая Rи); в результате той же тяги Т1 становится достаточно, чтобы достичь скорости v2. Здесь сопротивление мотолодки с учетом дополнительного сопротивления интерцепторов достигает величины тяги винта. Если при этом на ходу мотолодки интерцепторы поднять выше обреза транца, то кривая буксировочного сопротивления Rи вновь трансформируется в кривую R и можно рассчитывать на достижение скорости v3.
Таким образом, при явно выраженном «горбе» сопротивления (это характерно для корпусов с обводами типа глубокое V или с кормовой центровкой) целесообразно применение управляемых интерцепторов, позволяющих на ходу мотолодки в узком диапазоне, соответствующем «горбу», снизить величину буксировочного сопротивления. Иными словами, удается вывести мотолодку (катер) на глиссирование, располагая мотором меньшей мощности или с большей нагрузкой, или же сократить время выхода судна на глиссирование.
Большинство мотолодок, имеющих обводы с малой или умеренной килеватостью и относительную центровку 2 X g = 0,33—0,36, имеют перегибающуюся кривую буксировочного сопротивления (кривая R). В этом случае транцевые интерцепторы уменьшают сопротивление воды в переходном к глиссированию режиме (кривая Rи) и при располагаемой тяге Т1 позволяют поддерживать максимальную скорость v2. Однако при достижении этой скорости изменять на ходу рабочую высоту или убирать интерцептор совсем не следует, так как скорость при этом упадет до значения v1. Движение на этом режиме должно осуществляться с транцевыми интерцепторами, постоянно выдвинутыми на величину, обеспечивающую наибольшую скорость хода.
ЦКБ «Нептун» совместно с ЦНИИ им. акад. А. Н. Крылова были осуществлены натурные испытания серийных мотолодок «Нептун-3», «Москва-2», «Крым-3», «Прогресс-2» и «Днепр», которые оборудовались транцевыми интерцепторами, устанавливаемыми на стояние или управляемыми на ходу. Эти испытания преследовали цель получить экспериментальные данные, подтверждающие теоретические расчеты и позволяющие сформулировать конкретные рекомендации по использованию транцевых интерцепторов применительно к прогулочным судам серийного производства.
Испытывались два типа интерцепторов (рис. 2): сплошной — во всю ширину транца — и из двух отдельных пластин с разрывом над гребным винтом.
Первые же опыты со сплошным интерцептором, проведенные на мотолодке «Крым-3», показали бесперспективность этого варианта из-за сильного вредного влияния на работу гребного винта, в результате чего двигатель постоянно срывался «в разнос». Кроме того, мотолодка проявляла тенденцию к поперечной неустойчивости движения: корма периодически «соскальзывала» то вправо, то влево.
Все мотолодки, испытывавшиеся с раздельными интерцепторами, устойчиво держались на курсе; влияния на работу винта интерцепторы не оказывали.
В результате испытаний было установлено предельное значение рабочей высоты транцевых интерцепторов, определяемое зависимостью δmax = 0, 01Bтр; другими словами, максимальная высота интерцептора, т. е. величина, на которую он выступает за днище, не должна превышать 1 % ширины транца по скуле. Если, например, ширина транца равна 1,4 м, то предельная высота интерцептора ограничивается 14 мм.
Промежуточные значения высоты регулируемых интерцепторов оценивались безразмерным отношением δ = δi:δmax, где δi — любое промежуточное значение высоты.
Была определена оптимальная величина расстояния А между раздельными интерцепторами. Для мотолодок, эксплуатирующихся с мотором «Вихрь» или «Нептун-23», А = 400 мм; в общем случае это расстояние должно составлять примерно 1,7D — диаметра гребного винта. При этом за транцем в ДП остается полоса’ недеформированного потока, в которой без нарушения режима работы перемещается гребной винт при поворотах мотора.
В описываемом эксперименте применялись перемещающиеся в пазах параллельные интерцепторы, подобные штурманской параллельной линейке, и интерцепторы, выполненные в виде узкого сектора,. поворачивающегося в плоскости транца вокруг центра, расположенного в ДП (рис. 3).
Нижняя кромка интерцептора для эффективной его работы должна повторять обвод транца у днища. В наших экспериментах на мотолодке «Нептун-3» интерцепторы даже имели выступы соответственно профилю продольного редана (рис. 4, а). На мотолодках «Крым-3» и «Москва-2» нижняя кромка интерцепторов повторяла линию транца у днища, но не повторяла формы редана (рис. 4,6). Здесь реданы являлись гидродинамическими шайбами, препятствующими боковому растеканию потока перед интерцептором, что повышало его эффективность.
На секторном интерцепторе при изменении его рабочей высоты обеспечить строгое повторение обвода транца не удается из-за разницы линейных перемещений точек, расположенных на различных расстояниях от центра вращения. Это является причиной изменения формы эпюры давлений перед интерцептором, но, как показали сравнительные испытания на мотолодках «Нептун-3» и «Крым-3», не снижает эффективности его действия.
Важно, чтобы плоскость интерцептора плотно прилегала к поверхности транца. Щели и зазоры, через которые может перетекать вода, становятся причиной снижения давления Перед интерцептором и искажения эффекта его действия.
На мотолодках устанавливался один мотор «Вихрь-30» или «Нептун-23», имеющий сменные гребные винты — штатный и грузовой. Нагрузка устанавливалась исходя из возможных реальных вариантов эксплуатации в пределах 80—100 % полезной грузоподъемности. При этом пассажиры, запас топлива и багаж размещались на штатных местах. Ряд испытаний проводился с гидравлической мессдозой для измерения буксировочного сопротивления на ходовых режимах.
На рис. 6 для примера приведены полученные в натурных условиях зависимости буксировочного сопротивления и углов ходового дифферента от скорости для серийной мотолодки «Крым-3» с «Вихрем-30». Результаты испытаний показывают очевидный положительный эффект применения интерцепторов. Снижение сопротивления в переходном режиме оценивается величиной 20—28%.
Наивыгоднейшая высота интерцептора устанавливается опытным путем по наибольшей скорости хода, . развиваемой мотолодкой. Для разных случаев нагрузки достаточно трех-четырех пробегов, чтобы определить оптимальную высоту интерцептора, а затем использовать полученные данные при практической эксплуатации мотолодки. Подобные данные, полученные в результате натурных испытаний ряда мотолодок, приведены в таблице. Эти испытания проводились с мотором «Вихрь-30», фактическая мощность которого по контрольным замерам составляла 27,5 л. с.
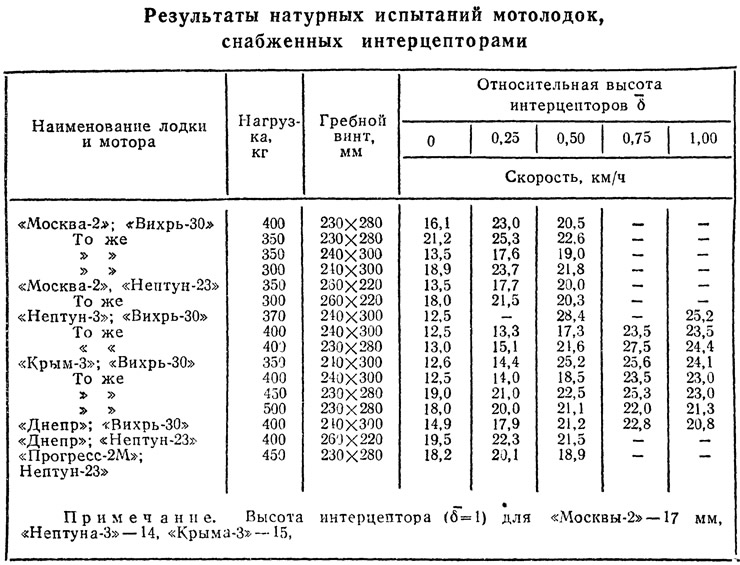
Как видно из этой таблицы, благодаря применению интерцепторов удается повысить скорость мотолодки на величину от 10—15 до 200% и более.
При изменении нагрузки уже во время плавания интерцепторы позволяют поддерживать наибольшую возможную скорость и тем самым сократить время перехода. В комбинации со сменными винтами или с винтами «мультипитч» могут быть достигнуты наиболее высокие результаты. При этом на тяжелых мотолодках, эксплуатируемых с одним мотором, достигается сокращение путевого расхода топлива в сравнении с двухмоторным вариантом. Так, например, мотолодка «Нептун-3» с двумя «Вихрями-30» при нагрузке около 400 кг развивает скорость хода 42 км/ч. При той же нагрузке с одним 30-сильным мотором и с интерцепторами скорость составляет около 28 км/ч. В первом случае на преодоление 100 км пути требуется 2,4 ч хода, во втором — 3,6 ч. При часовом расходе горючего 11 кг/ч в первом случае за 2,4 ч два мотора израсходуют 53 кг топлива, а во втором за 3,6 ч один мотор — 39,5 кг. Разность в 13,5 кг — это 25% экономии топлива в сравнении с двухмоторной установкой. Те же 13,5 кг — это дополнительные 1,2 часа хода под одним мотором, т. е. лишние 33 км к 100 пройденным, иными словами — увеличение дальности плавания на треть при одинаковых запасах топлива.
Аналогичное сопоставление одно- и двухмоторных вариантов эксплуатации мотолодки «Крым-3» при нагрузке 450 кг показывает, что достигается 17—20%-ное сокращение расхода, т. е. экономия 9—11 кг топлива на 100 км пути. Для «Москвы-2» — при нагрузке 350 кг эта цифра составляет 25 %, т. е. 14,5 кг на 100 км пути.
Естественно, что для разных мотолодок и различных вариантов нагрузки эти цифры могут колебаться, однако во всех случаях сокращение путевого расхода топлива оказывается не ниже 10—12%, я может достигать 30%.
Можно также сопоставить случаи эксплуатации мотолодки с интерцепторами и без них с одним мотором. Мотолодка «Днепр» при полной нагрузке (400 кг) получила при наших испытаниях приращение скорости с 15 почти до 23 км/ч. Соответственно уменьшению времени пробега определенного участка пути можно оценить и сокращение путевого расхода топлива.
Интерцепторы могут оказаться очень полезными для быстроходных катеров, оборудованных стационарным двигателем, для которого нет сменных винтов (или в случае, когда смена винтов невозможна). Интерцепторы помогут, уменьшая сопротивление катера на «горбе», существенно расширить область его эффективного использования.
Обобщая сказанное, отметим, что основным критерием оценки целесообразности использования интерцепторов является угол ходового дифферента. Если в переходном режиме угол дифферента превышает 4—5°, следует ожидать положительного эффекта. Если же дифферент менее 4°, интерцепторы ничего не дадут. Это, в частности, подтвердилось результатами испытаний мотолодки «Прогресс-2», обладающей минимальными углами ходового дифферента на всех режимах; при установке интерцепторов удалось повысить скорость лишь на 10 % и только в очень узком диапазоне нагрузок, близких к максимальным.
Примечания
1. Сам этот термин авиационного происхождения (можно напомнить, что некогда так предлагалось называть и продольные реданы на днище катера). «Политехнический словарь» дает такое объяснение: «И. (от латинского intercipere — перехватывать, отбивать, пресекать) — приспособление для местного срыва воздушного потока, обтекающего летательный аппарат. Обычно И. — выдвижная поворотная или фиксированная металлическая пластинка, устанавливаемая поперек потока на крыле самолета».
2. Отношение расстояния от центра тяжести до транца к смоченной длине при глиссировании.
Источник