Инвалидная коляска своими руками схемы
 Бесплатная техническая библиотека:
Бесплатная техническая библиотека:
▪ Все статьи А-Я
▪ Энциклопедия радиоэлектроники и электротехники
▪ Новости науки и техники
▪ Архив статей и поиск
▪ Ваши истории из жизни
▪ На досуге
▪ Случайные статьи
▪ Отзывы о сайте
Справочник:
▪ Большая энциклопедия для детей и взрослых
▪ Биографии великих ученых
▪ Важнейшие научные открытия
▪ Детская научная лаборатория
▪ Должностные инструкции
▪ Домашняя мастерская
▪ Жизнь замечательных физиков
▪ Заводские технологии на дому
▪ Загадки, ребусы, вопросы с подвохом
▪ Инструменты и механизмы для сельского хозяйства
▪ Искусство аудио
▪ Искусство видео
▪ История техники, технологии, предметов вокруг нас
▪ И тут появился изобретатель (ТРИЗ)
▪ Конспекты лекций, шпаргалки
▪ Крылатые слова, фразеологизмы
▪ Личный транспорт: наземный, водный, воздушный
▪ Любителям путешествовать — советы туристу
▪ Моделирование
▪ Нормативная документация по охране труда
▪ Опыты по физике
▪ Опыты по химии
▪ Основы безопасной жизнедеятельности (ОБЖД)
▪ Основы первой медицинской помощи (ОПМП)
▪ Охрана труда
▪ Радиоэлектроника и электротехника
▪ Строителю, домашнему мастеру
▪ Типовые инструкции по охране труда (ТОИ)
▪ Чудеса природы
▪ Шпионские штучки
▪ Электрик в доме
▪ Эффектные фокусы и их разгадки
Техническая документация:
▪ Схемы и сервис-мануалы
▪ Книги, журналы, сборники
▪ Справочники
▪ Параметры радиодеталей
▪ Прошивки
▪ Инструкции по эксплуатации
▪ Энциклопедия радиоэлектроники и электротехники
Бесплатный архив статей
(500000 статей в Архиве)
Алфавитный указатель статей в книгах и журналах
 Бонусы:
Бонусы:
▪ Ваши истории
▪ Викторина онлайн
▪ Загадки для взрослых и детей
▪ Знаете ли Вы, что.
▪ Зрительные иллюзии
▪ Веселые задачки
▪ Каталог Вивасан
▪ Палиндромы
▪ Сборка кубика Рубика
▪ Форумы
▪ Голосования
▪ Карта сайта
Дизайн и поддержка:
Александр Кузнецов
Техническое обеспечение:
Михаил Булах
Программирование:
Данил Мончукин
Маркетинг:
Татьяна Анастасьева
При использовании материалов сайта обязательна ссылка на https://www.diagram.com.ua

сделано в Украине

![]()
Несложный электропривод, превращающий обычное инвалидное кресло в самоходное, разработан на малом предприятии «Электромобиль». Устройство это достаточно простое; изготовить его можно даже в квартире, без применения специальных инструментов и материалов. В качестве базового использовалось наиболее распространенное и надежное инвалидное кресло — коляска модели «400» производства Ставровского завода, хотя можно модернизировать таким образом и любое другое.
![]()
В качестве силового агрегата рекомендуется электродвигатель типа МЭ272 на напряжение 12 В и мощностью 100 Вт (от вентилятора автомобиля «Жигули»). Крутящий момент от вала двигателя передается на колесо с помощью простейшего фрикционного ролика. На валу двигателя он фиксируется штифтом и специальной удлиненной гайкой. Наилучший материал для ролика — чугун, поскольку он обладает хорошими фрикционными свойствами. Следует отметить, что ролик и спецгайка — единственные точеные детали всей конструкции.
Электродвигатель крепится тремя резьбовыми шпильками М6 на промежуточной пластине. А та, в свою очередь, фиксируется на каркасе винтом М8.
Фрикционный ролик прижимается к колесу с помощью механизма правого стояночного тормоза, так что его рукоятка превращается в рычаг управления сцеплением. Доработка механизма заключается в удалении пластиковой тормозной колодки и обрезке части рычага, на которую она крепилась. На расстоянии 3. 5 мм от края реза в рычаге пропиливается вертикальный паз размерами 4,2×6 мм, через который пропускается болт М4, соединяющий рычаг и промежуточную пластину — основание электродвигателя.
Бывший тормозной механизм следует отрегулировать так, чтобы при нажатии на рычаг (до момента его фиксации) ролик вдавливался в шину на 5. 7 мм, а при переводе рычага в другое крайнее положение выходил из контакта с колесом.
Чтобы установить прижимной узел в каркас кресла, необходимо отрезать трубу фиксации сиденья. На прочность кресла это не повлияет, но, поскольку такая процедура, как правило, выполняется нечасто, вряд ли эти сложности будут иметь принципиальное значение.
Автомобильный аккумулятор типа 6СТ55 устанавливается за сиденьем на раме из дюралюминиевых уголков, закрепленной на каркасе винтами М6.
![]()
Инвалидное кресло-коляска модели «400», оборудованное блоком электропривода «Элетран-2» (на виде «Б» аккумулятор условно не показан) (нажмите для увеличения): 1 -кресло модели «400»; 2 блок управления двигателя; 3-тумблер S1 включения двигателя; 4 — тумблер S2 «вперед — назад»; 5 -рычаг управления креслом; 6 — кабель от резистора R16; 7 — рукоятка управления сцеплением; 8-электродвигатель МЭ272; 9 — фрикционный ролик (чугун); 10-основание двигателя (сталь); 11-аккумулятор 6СТ55; 12-рама под аккумулятор (уголки 20×20 мм); 13 — ведущее колесо; 14 ручка управления двигателем; 15 — винт М6 с гайкой и контргайкой; 16 — спецгайка крепления фрикционного ролика
![]()
Рулевое управление (нажмите для увеличения): 1 — рулевой рычаг; 2 — втулка; 3 — труба 4 — рукоятка; 5 — шайба; 6 — кабель от резистора R16
![]()
Принципиальная схема блока управления электродвигателем (нажмите для увеличения)
Коммутирование тягового электродвигателя производится с помощью электронного регулятора оборотов. Следует учесть, что транзисторы VT5 и VT6 устанавливаются на теплоотводящих радиаторах с мощностью рассеивания не менее 20 Вт. Реле К1 — типа 111.3747 — такое используется для включения фар на автомобилях типа «Жигули». Включается блок регулятора тумблером S1 типа А3С-20, выполняющим роль автомата защиты при перегрузках. Тумблер S2 типа ПТ2-10 предназначен для изменения направления вращения вала двигателя и, соответственно, реверсирования хода кресла.
Мощный транзистор VT6 соединен последовательно с двигателем. Управляется транзистор генератором, собранным на транзисторах VT1 и VT2, через устройство на DA1. Задающим элементом служит потенциометр R16, который устанавливается в ручке управления в рулевом рычаге. При полностью открытом транзисторе VT6 «закорачиваются» контакты К1.1 реле К1. Угол поворота резистора R16, при котором это происходит, определяется сопротивлением резистора R8, а нижний порог «приоткрывания» выходного ключа выставляется с помощью резистора R7. Сечение соединительных проводов схемы «аккумулятор — регулятор — пульт управления» — не менее 2 мм2.
Кресло управляется с помощью рычага, резьбовой конец которого навинчивается на цапфу правого или левого переднего поворотного колеса и закрепляется болтом М6 с гайкой и контргайкой. На противоположном конце рычага монтируется резистор R16, регулирующий скорость передвижения.
![]()
Монтажная плата регулятора частоты вращения электродвигателя (нажмите для увеличения)
![]()
Монтажная схема регулятора частоты вращения электродвигателя (нажмите для увеличения)
![]()
![]()
Тормозная система электрифицированного кресла — штатная, действующая на левое колесо. Для удобства пользования ею с тормозного рычага снимается пластиковая ручка и к нему приваривается стальной стержень диаметром 8 мм и длиной около 300 мм. Теперь, при необходимости, кресло можно подтормаживать и при движении в, моторном варианте.
Никаких особых требований при эксплуатации «Элетрана-2» не регламентируется. Важно лишь следить за давлением в шинах, в частности правого колеса, к которому прижимается фрикционный ролик, при падении давления возможно его проскальзывание. Хорошо накачаны должны быть и передние колеса — это уменьшит сопротивление качению и улучшит управляемость.
Кресло, оснащенное таким электроприводом, движется почти бесшумно и обладает хорошей маневренностью. Запас хода от заряженного аккумулятора — 20. 25 км. Скорость движения — около 6 км/час. Рычаг сцепления позволяет отключать фрикционный ролик от колеса — при этом креслом можно пользоваться в его обычном варианте, вращая колеса руками.
 Смотрите другие статьи раздела Личный транспорт: наземный, водный, воздушный.
Смотрите другие статьи раздела Личный транспорт: наземный, водный, воздушный.
 Читайте и пишите полезные комментарии к этой статье.
Читайте и пишите полезные комментарии к этой статье.
Источник
Умная инвалидная коляска-трансформер
Хочу рассказать о нашем проекте создания вездеходной инвалидной коляски с электроприводом. В техническом понимании это не просто коляска, а настоящий робот, я бы даже сказал – робот-трансформер.

Какой должна быть эта коляска?
- Большинство инвалидов не может иметь несколько электроколясок, поэтому она должна быть максимально универсальной. Чтоб на ней можно было передвигаться и дома, и на улице, и в лесу, и чтоб можно было самостоятельно подняться по лестнице и на бордюр залезть. Отсюда же вытекает и второй пункт.
- Ширина коляски не более 650 мм, чтоб можно было в любой проем и лифт заехать. Длина не более 1100 мм.
- Безопасной.
- Дешевой. Думаю, здесь комментарии излишни.
- Энергоэффективной, так как аккумуляторы стоят дорого.
Главный вопрос, требующий кардинальных конструктивных подходов — это, конечно же, подъем по лестнице. Было рассмотрено очень большое количество вариантов реализации, начиная от обычных колес большого диаметра с глубоким протектором и заканчивая колесом-трансформером, превращающимся в шагающее устройство. Везде возникали свои проблемы: какие-то решения не были безопасными, какие-то варианты подходили только под один тип лестниц (определенная высота и глубина ступени) и т.д. Наилучшим вариантом оказался гусеничный движитель.
Наша первая классная идея, обреченная на провал
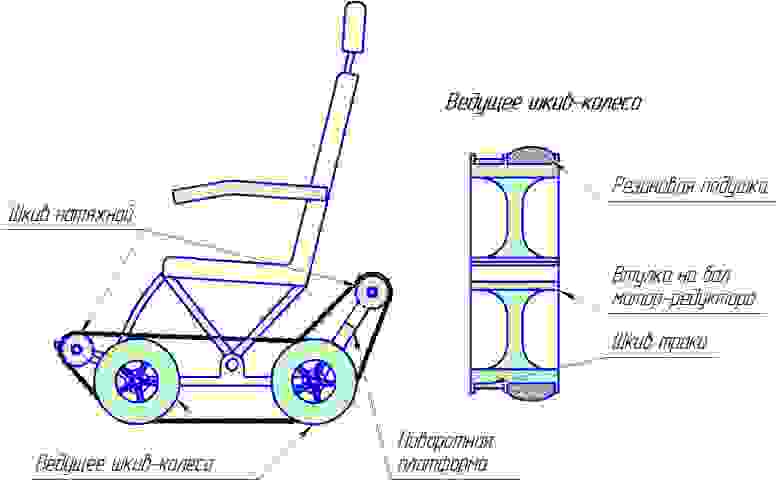
Идея была следующей: 4 мотор-редуктора (полный привод), поворотное кресло, поворотная задняя платформа и 4 шкив-колеса с натянутыми траками. Фишка шкив-колес в том, что на ровной поверхности трака земли не касается и, соответственно, не создает вибраций и дополнительного трения. Коляска едет на резиновых подушках шкив-колес. А при наезде на препятствие, например на лестницу, трака вступает в зацепление с этим самым препятствием.
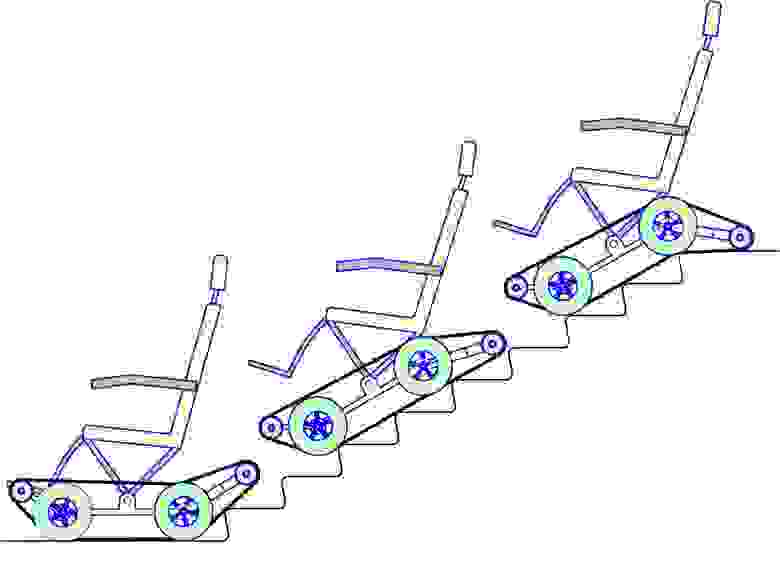
Движение по лестнице осуществляется следующим образом:
- Поворотная платформа опускается для удобного заезда на лестницу.
- После заезда задняя платформа опускается в одну линию с основной платформой. Таким образом, суммарная длина гусеничной базы обеспечивает хорошее сцепление и безопасность от переворота.
- При съезде с лестницы задняя платформа опускается вниз для предотвращения резкого падение.
Во время подъема кресло автоматически поворачивается, сохраняя свое горизонтальное положение. Спуск с лестницы происходит точно по такой же схеме, но в обратном порядке.
Создание первого прототипа
Для проверки идеи мы взялись за создание прототипа. Управляющую электронику решили пока не изобретать, а использовать 2 пульта от других электроколясок (каждый из которых управляет 2-ми двигателями). Привода кресла и задней платформы управлялись с помощью трехпозиционных тумблеров.
Изготовление трак – это вообще отдельная история. Основа самодельных трак – это ремни ГРМ от Импрезы. Ремни сшиты между собой. В качестве грунтозацепов были нарезаны сегменты клинового ремня и нашиты саморезами.

Приемы использовались колхозные, так как финансировалось все со своего кармана. Стоимость изготовления 4-х таких трак по чертежам (даже в Китае) начинается от 70 тыс. руб. (включая изготовление оснастки). В результате самодельных трак хватило, чтобы коляска поднялась по лестнице без пассажира. От полезной нагрузки трака порвалась в месте соединения.
На создание первого прототипа ушло около 80 тыс. руб., включая аренду гаражной мастерской.
По результатам испытаний стало ясно:
- На траке с грунтозацепами подняться по лестнице можно. Даже если ступени разного размера и сколоты.
- Идея с поворотной задней платформой работает.
- Схема с шкив-колесом обречена на провал.
Основная проблема заключается в том, что для подъема по лестнице и движения по ровной поверхности нужны принципиально разные скорости и моменты, отличающиеся примерно в 10 раз. Конечно, можно установить приводы большей мощности, тогда при движении на плоскости нагрузка на двигатель будет значительно меньше номинальной, а при подъеме по лестнице напряжение ниже номинального (чтобы снизить скорость). При таком раскладе про низкую стоимость и энергоэффективность можно забыть.
Электроколяска – трансформер.
Было несколько вариантов решения данной проблемы:
- Сделать редуктор с переключением скоростей. Точнее, 4 редуктора или как минимум 2 (на левую и правую стороны).
- Гусеницы и колеса вращать от разных приводов.
- Разделить колесную и гусеничную базы. При этом колесо и трака будут приводиться в движение одним приводом с редукцией на траку.
После плотного анализа и проведенных расчетов выяснилось, что последний вариант самый недорогостоящий и технически реализуемый.
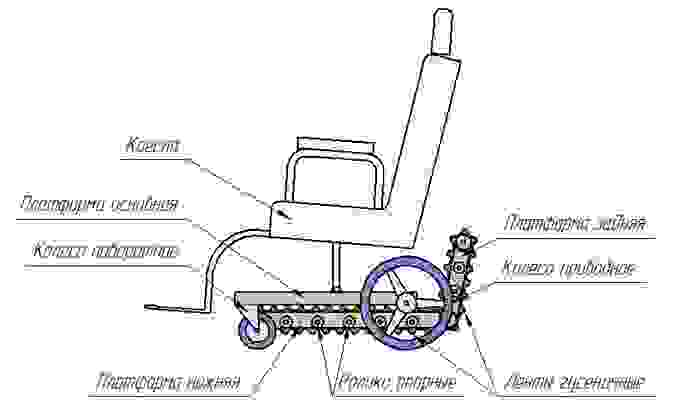
На ровной поверхности гусеничные базы (нижняя и задняя) находятся в крайнем верхнем положении и совершенно не мешают движению коляски. При необходимости преодоления препятствия нижняя и задняя платформы опускаются, и коляска встает на гусеницы. В итоге, за счет механической передачи от вала двигателя до ведущего шкива траки и разницы диаметров колеса и шкива удалось достичь проектной десятикратной разницы в скоростях и моментах.
Реализация идеи в железе
На этот раз к изготовлению прототипа подошли более основательным образом: заказали в Поднебесной нужные траки, привода, закупили электронику. Механическую обработку, лазерную резку и гибку заказали на предприятиях Новосибирска. Сборку и сварку, естественно, осуществляли сами. Все работы как в классическом стартапе проводили в гаражной мастерской.
Управляющая система состоит из пульта и исполнительного модуля, которые общаются по блютузу. Беспроводной пульт особенно необходим в случае, когда инвалид не может сам управлять джойстиком, и коляской управляет сопровождающее лицо. При подъеме на лестницу сопровождающему не нужно тянуться к ручке кресла за джойстиком, держа пульт в руке, он визуально контролирует движение.
Автоматическая система поддержания горизонтальности кресла основана на акселлерометре. Так как система не высокодинамична, можно обойтись без гироскопа и сократить математические расчеты. На механизмах опускания-подъема нижней и задней платформ есть датчики обратной связи. Информация о положении платформ передается на пульт. Питание системы обеспечивается гелевыми аккумуляторами 24 В (в следующих версиях будем использовать литий-ион).
Испытания проводили на ступенях многоэтажки:
Проблем, требующих решения, все еще достаточно. Но одно можно сказать точно – это работает! На разработку колесно-гусеничной системы с опускающимися платформами подана заявка на патент. Дальнейшие наши действия направлены на доработку электроники, увеличение момента на гусеницах, изменения профиля траки для наилучшего зацепления и, конечно же, создание презентабельного облика продукта.
На тему важности данной разработки мы сняли видеоролик:
Теперь мы сможем дать инвалиду свободу передвижения. Лестница дома, магазина, кинотеатра, пара лестничных пролетов на пути к другу или подруге покажутся для них сущими пустяками.
Источник