- Самодельный измеритель инерционных перегрузок в автомобиле (индикатор ускорения)
- Что показывает микросхема-акселерометр + самодельный двух-осевой датчик наклона.
- Найдены возможные дубликаты
- Arduino & Pi
- Правила сообщества
- Беспроводной пульт для презентаций своими руками
- Увеличение количества пинов NodeMCU с помощью сдвигового регистра
- Дисплей Nextion и NRF24 беспроводное управлении реле
- Самое простое дистанционное управление компьютером
- Как сделать тетрис классический
- МЭМСы. Как устроены современные датчики?
- Простейший акселерометр, как он работает?
- Пьезоэлектрический акселерометр
- Электронные акселерометры
- Устройство МЭМС акселерометра. Как превратить изменение емкости в сигнал?
- Емкостной полумост
- Просто добавь усилитель
- Архитектура МЭМС акселерометра
- Какой преобразователь выбрать для работы с датчиками?
- Где достать такие технологии?
- Какие наработки есть у нашей компании в этом направлении?
- Преобразователь напряжение-частота
Самодельный измеритель инерционных перегрузок в автомобиле (индикатор ускорения)
С помощью этого измерителя вы сможете узнать, сколько «G» вы сможете выжать на своем авто. Измеритель в действии:


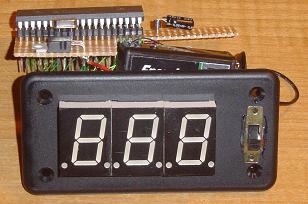
Целью данного проекта является сборка устройства, которое смогло бы измерить перегрузки, которые вы испытываете в своем автомобиле. К тому же оно должно удобно устанавливаться у лобового стекла автомобиля. Устройство имеет трехсимвольный 7-сегментный светодиодный дисплей, отображающий перегрузки в режиме реального времени с точностью до десятых. Список необходимых деталей:
- Стабилизатор напряжения LM7805 5 В

- Микроконтроллер PIC 18F452 Является «мозгом» всего устройства

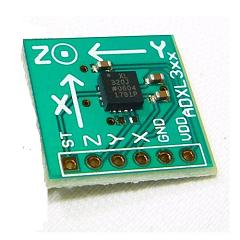
- Акселерометр ADXL320 Основной сенсор — измеряет ускорение и выдает аналоговое значение эквивалентное ускорению.
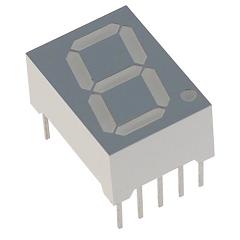
- 7-сегментный светодиодный индикатор Необходим для отображения текущего значения перегрузки. Управляется микроконтроллером. Требуется 3 шт.
- Кварцевый резонатор 20 МГц Может быть заменен на кварцы частотой в 4 МГц и 8 МГц без каких-либо последствий.

- Элемент питания типоразмера «Крона» 9 В
- Пластиковый корпус для проекта
- Все необходимое оборудование для пайки
- Макетная плата
- SPST переключатель

Теперь перейдем к схеме. Схему можно разделить на три главные части : схема сенсора, в которой сенсор подключается к аналого-цифровому преобразователю микроконтроллера; схема питания, включающая в себя переключатель, стабилизатор напряжения и элемент питания; схема подключения 7-сегментных индикаторов к микроконтроллеру.
Характеристики каждой части схемы:
- Схема питания Схему питания представляет собой соединенный с стабилизатором 9 В элемент, что гарантирует стабильной напряжение в 5 В и конденсатор емкость в 10 мкФ между землей и плюсом питания.
- Схема сенсора Подключается сенсор крайне просто — соединяем аналоговый вывод микроконтроллера AN с выводом Y-axis сенсора. Остальные выводы сенсора не используются, естественно за исключением Vcc и Gnd.
- 7-сегментные светодиодные индикаторы Возможно, соединение индикатора с микроконтроллером может показаться несколько хаотичным. Причина такого соединения крайне проста — вначале писалась программа для микроконтроллера, а лишь потом разводилась схема. Попробую описать теорию работы акселерометра вкратце — акселерометр измеряет ускорение, учитывая гравитационную силу земли, поэтому его также можно использовать для измерения наклона (см. видео).
Теперь перейдем от теории к практике, а именно пошаговой инструкции:
Шаг 1 — Достаем все необходимые детали.

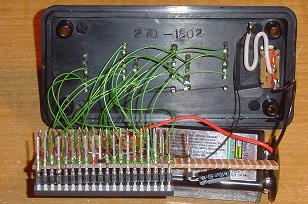
Шаг 2 — Подготавливаем корпус.

Шаг 3 — Отмечаем расположение выводов индикаторов на бумаге.

Шаг 4 — Просверливаем отверстия для выводов индикаторов.

Шаг 5 — Приклеиваем индикаторы к корпусу.

Шаг 6 — Просверливаем отверстие для выключателя и закрепляем его с помощью эпоксидной смолы.

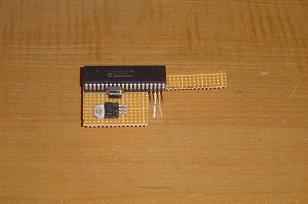
Шаг 7-8 — Вырезаем нужную «фигуру» из макетной платы и помещаем ее в корпус. Устанавливаем элемент питания (это объясняет L-образную форму макетной платы).

Шаг 9 — Собираем все вместе.

Шаг 10 — Подключаем индикаторы к микроконтроллеру.
Шаг 11 — Так все должно выглядеть на данном шаге.
Шаг 12 — Просверливаем отверстия для акселерометра.
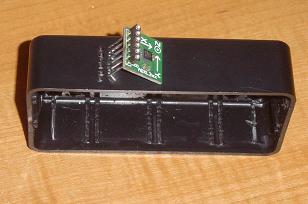
Шаг 13 — Приклеиваем акселерометр к корпусу.
Шаг 14 — Соединяем акселерометр с микроконтроллером.

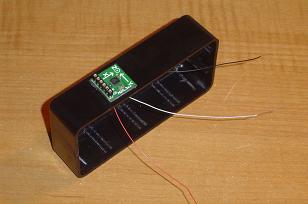
Шаг 15 — «Наводим лоск» с помощью изоляционной ленты.

Шаг 16 — Прикрепляем присоски к корпусу.

Что же касается программного обеспечения, тут все намного проще.
Исходный код предоставлен ниже:
while(1) <
update_char_display(char_disp); //Update 7-Segs
Delay1KTCYx(250); //Delay A Little While
Delay10TCYx(5); //Redundant Delay For A/D
ConvertADC(); //Do A/D Conversion
while( BusyADC() );
current_result = ReadADC();
temp = current_result — past_result;
//If Only A Slight Change Don’t Update
if( temp > 2 || temp
Перевод: Ale)(ander, по заказу РадиоЛоцман
Источник
Что показывает микросхема-акселерометр + самодельный двух-осевой датчик наклона.
Коротко и понятно.
Найдены возможные дубликаты

Arduino & Pi
1K постов 17.9K подписчиков
Правила сообщества
В нашем сообществе запрещается:
• Добавлять посты не относящиеся к тематике сообщества, либо не несущие какой-либо полезной нагрузки (флуд)
• Задавать очевидные вопросы в виде постов, не воспользовавшись перед этим поиском
• Выкладывать код прямо в посте — используйте для этого сервисы ideone.com, gist.github.com или схожие ресурсы (pastebin запрещен)
• Рассуждать на темы политики
это урок. он обьяснял как работает акселерометр. показал так сказать аналог
Ресурс у этих резисторов сильно низкий, а так ничего.
Суровый челябинский акселерометр.
Как в маршрутке или в метро , играя в игру где используется акселерометр , он не начинает тупить ?
Зачем? За 60 рублей можно взять нормальный гироскоп с акселерометром работающий по интерфейсу I2C. у которого все параметры на порядки лучше.
когда начнешь сам такие штуки лепить, тоже еб*ло будет серьезным)

Беспроводной пульт для презентаций своими руками
Сегодня хотел бы поделиться информацией, как можно собрать беспроводной пульт для презентаций. Про беспроводное управление компьютером рассказывал в предыдущей публикации.
После чего решил сделать прошивку, которая подойдет для реализации пульта для управления презентацией.
Управлять можно не только презентацией, но и медиафайлами и уровнем звука.
Также можно управлять курсором мыши, что придает пульту большую универсальность и область применения.
Управлять с помощью пульта можно:
• Открытие и просмотр документов,
При желании функционал можно урезать или расширить.
Надеюсь моя информация будет полезной.
Спасибо! Всем добра!
Увеличение количества пинов NodeMCU с помощью сдвигового регистра
Так как у NodeMCU не так и много пинов для подключения периферии, часто возникает нехватка pin. Поэтому такую замечательную отладочную плату откладываем на полку и ищем другие железки для реализации проекта.
Но в некоторых случаях можно расширить количество пинов с помощью сдвигового регистра и реализовать проект на NodeMCU.
Все исходные материалы к уроку можно найти на сайте>>
Надеюсь моя информация будет полезной.
Спасибо! Всем добра!
Дисплей Nextion и NRF24 беспроводное управлении реле
Я уже вкладывал уроки про дисплей Nextion. В которых рассказывал, как можно организовать контроль доступа. Сегодня в проекте рассмотрим более расширено применение полученных знаний из уроков.
С помощью радио модуля NRF24 беспроводным способом (по воздуху) будем управлять реле. Включать и выключать можно различную нагрузку: свет, отопление, вентиляцию и пр.
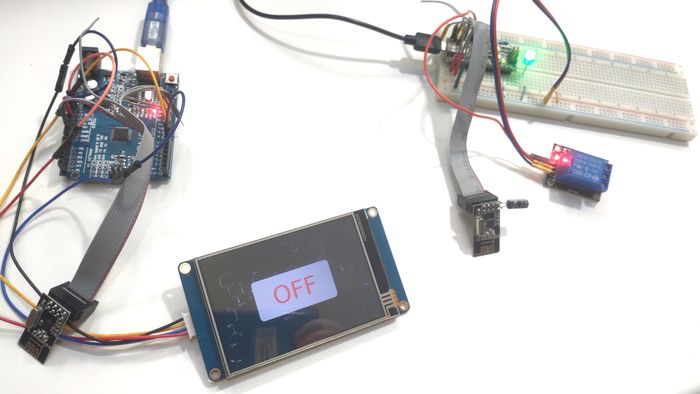
На основе данной системы можно сделать беспроводное управление освещением в доме.

Надеюсь моя информация будет полезной.
Спасибо! Всем добра!
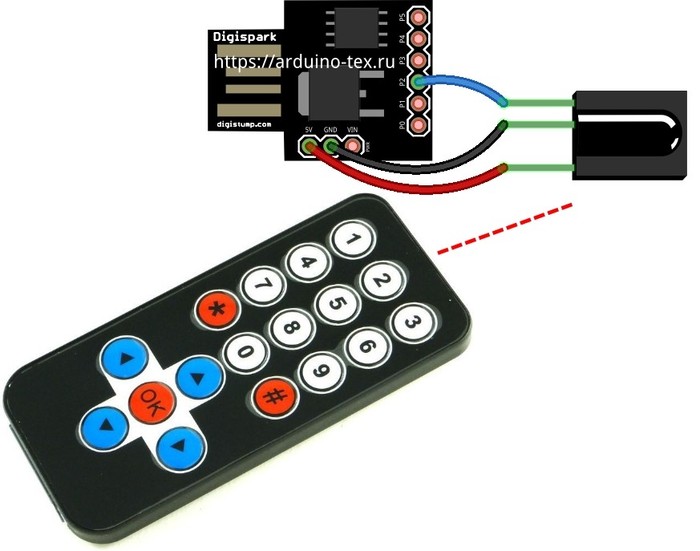
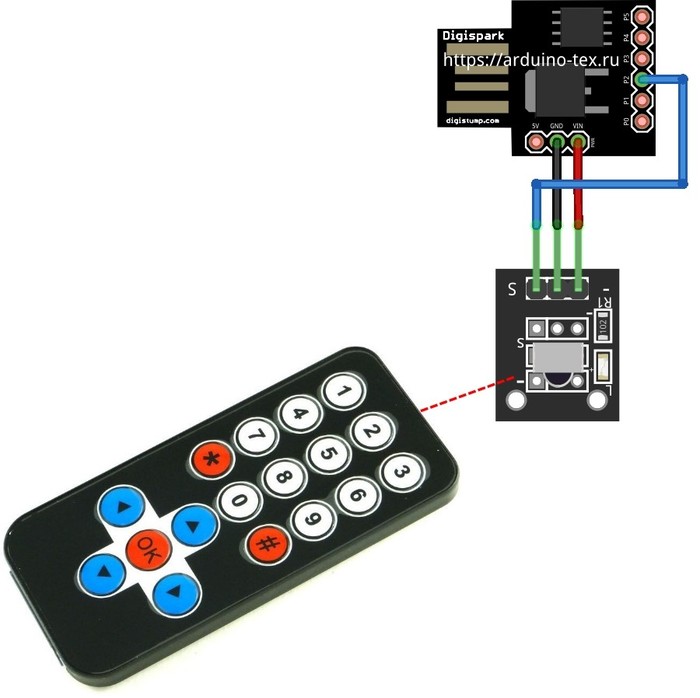
Самое простое дистанционное управление компьютером
Сегодня расскажу, как я делал удалённое управление ПК с помощью пульта ДУ. Реализовывал я это года 3-4 назад для переключения мультиков для ребёнка на YouTube.
Когда я сидел за компьютером, а ребенок смотрел мультики в другом конце комнаты. И чтобы не вставать постоянно для переключения мультфильмов. Сделал вот такую леньтяйку.

Сегодня данным проектом решил поделиться с вами.

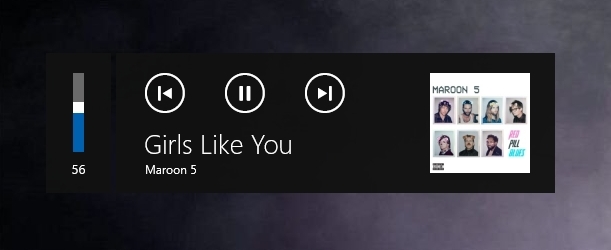
Так выглядит переключение композиций в ВК. А также регулирование громкости.
Надеюсь моя информация будет полезной.
Спасибо! Всем добра!


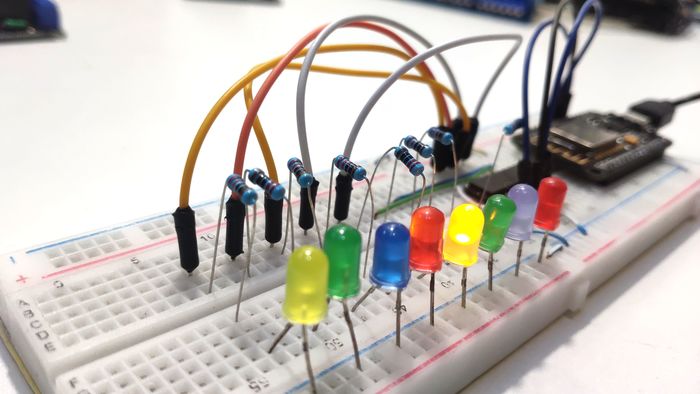
Как сделать тетрис классический
Дисплей от Nokia 5110 — это наверное самый дешевый дисплей который можно найти для своих проектов на Arduino. На базе него мы разберемся с вопросом: «Как же сделать тетрис-игру?@
Основная проблема всех библиотек для рисования на этом дисплее — отсутствие поддержки русского языка. Решается установкой дополнительных шрифтов, которые подменяют английские символы на русские.

Избалованные i2c шиной скажут «фу», ведь у нас 4 провода управления SCLK, DIN, DC, CE и RTS которые соответственно подключаются к Arduino, 3, 4, 5, 6, 7. Не забываем подключить питание 3.3 вольта, и землю.
Для рисования будем использовать библиотеку Adafruit GFX Library. В архиве с ней есть примеры использования.
Для управления игрой используем ИК пульт от телевизора. Сигнал будет принимать датчик TL1838.
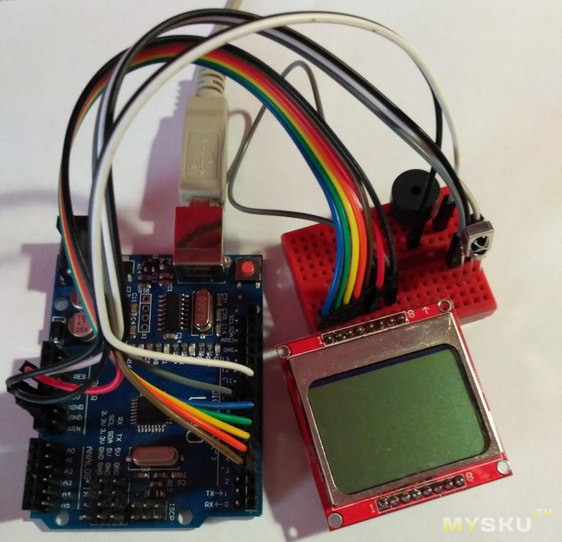
Я использовал Arduino Uno, т.к. она уже имеет стабилизатор на 3.3 вольт.
Подключение IR приемника:
pin 8 — IR (управляющий). Питание на +5V и GND.
pin 9 — speaker, Земля на GND.
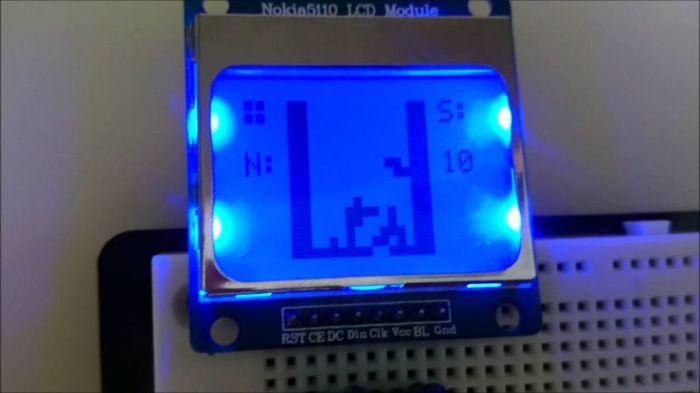
При «проваливании» на собранную строку будет воспроизводиться писк. Он реализован на особенности нескольких пинов Ардуино (в нашем случае 9) выдавать ШИМ с заданной частотой. Игра поддерживает все атрибуты нормальной игры. Ту и подсказка следующей фигуры и текущий счет. Игра ведет учет рекордов. Это значение хранится в энергонезависимой памяти Ардуино. Чтобы сбросить рекорд, достаточно изменить в скетче значение flfirst=1234 на любое другое. В игре также идет автоувеличение скорости падения через каждые 30 списанных строчек, так что, бесконечно долго поиграть не получится ). Скетч не оптимизировался и тщательно не прогонялся, а был написан на досуге в свое удовольствие. Если кто обнаружит ошибку — пишите. О ©. Скетч разрешается править для себя как угодно. Только при публикации где-либо своих вариантов ссылку на первоисточник-муську указывайте ). Для чего делал — длинные выходные + «из любви к искусству». Была бы дочка маленькой, сделал бы ей, наверное, мини игровой автомат для кукольной комнатки на 8 марта, как раз успел бы. Добавил бы несколько игр типа Змейки и Арканоида, а корпус вырезал бы из текстолита, наверное. Только дочка в этом году уже докторскую защищает, так, что мимо, но может кому еще эта идея пригодится ).
Источник
МЭМСы. Как устроены современные датчики?
Микроэлектромеханические системы (МЭМС) — устройства, объединяющие в себе микроэлектронные и микромеханические компоненты. Сейчас довольно трудно встретить системы в которых не используются датчики, выполненные по данной технологии. Но как устроены современные датчики и какие преобразователи используются для работы с ними? Постараемся детально разобраться в этом вопросе, основываясь на работе современных МЭМС-акселерометров.

Простейший акселерометр, как он работает?
Акселерометр — прибор, измеряющий проекцию кажущегося ускорения (разности между истинным ускорением объекта и гравитационным ускорением). Принцип работы можно объяснить с помощью простой модели.
Модель устройства механического акселерометра (оригинал)
При увеличении ускорения, масса будет растягивать пружину. По закону Гука из школьной программы физики можно с легкостью найти ускорение системы:
 , где k -коэффициент упругости пружины,
, где k -коэффициент упругости пружины,  – ее растяжение и m – масса груза.
– ее растяжение и m – масса груза.
Используя три перпендикулярно расположенных датчика, можно узнать ускорение предмета по 3-м осям, и зная начальные условия определить положение тела в пространстве.
Эта незамысловатая модель представляет собой основу работы большинства акселерометров, которые можно поделить на 3 основные подгруппы:
- механические
- электронные
- пьезоэлектрические
Есть еще термальные и оптические, однако их рассматривать не будем. Если с механическими все понятно (по сути, их работу отражает модель сверху), то с электронными и пьезоэлектрическими немного поинтереснее.
Пьезоэлектрический акселерометр
Основывается данный тип датчиков на пьезорезистивном эффекте, который был открыт в 1954 году Смитом в таких полупроводниках как германий и кремний. В отличие от пьезоэлектрического эффекта, пьезорезистивный эффект вызывает изменение только электрического сопротивления, но не электрического потенциала.
При увеличении ускорения, инертная масса увеличивает/уменьшает давление на пьезоэлемент. Благодаря пьезоэффекту происходит генерация сигнала, который зависит от внешнего ускорения.
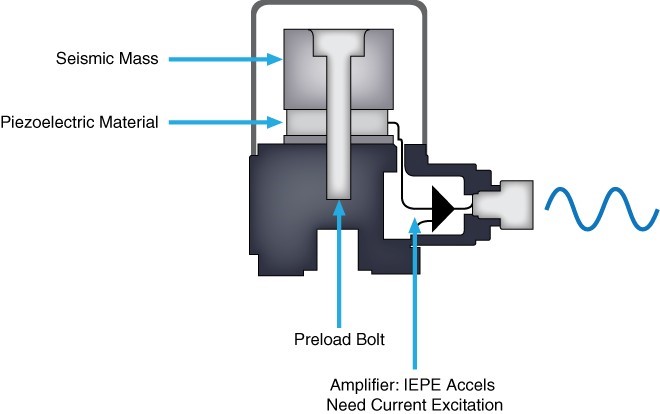
Устройство пьезоэлектрического акселерометра (оригинал)
Датчики такого типа требуют дополнительного усилителя, который увеличивает амплитуду сигнала, и создает низкоимпедансный выход для работы с внешними устройствами. Для калибровки нулевого значения ускорения используется Preload Bolt, масса которого рассчитана так, чтобы соответствовать нулевой точки ускорения в системе.
Датчики такого типа до сих пор сильно распространены, и в основном применяются в системах, требующих высокую надежность — automotive. Для коммерческой электроники зачастую используют электронные акселерометры, которые имеют меньший размер и цену.
Электронные акселерометры
Принцип работы электронных датчиков основан на изменении емкости конденсаторов при изменении ускорения. Простейшая модель работы представлена на картинке.
Устройство 2-х осевого электро-механического акселерометра
При изменении ускорения, масса изменяет расстояние между обкладками конденсатора. Из простейшей формулы емкости конденасатора  следует, что при изменении d расстояния между обкладками емкость конденсатора будет также изменяться. Широкое применение данный метод получил, благодаря развитию МЭМС (MEMS)– микроэлектромеханических систем.
следует, что при изменении d расстояния между обкладками емкость конденсатора будет также изменяться. Широкое применение данный метод получил, благодаря развитию МЭМС (MEMS)– микроэлектромеханических систем.
МЭМС технологии позволяют создавать конденсаторы с подвижными обкладками на кремниевой подложке, что существенно уменьшает размер устройства, и что не маловажно – его стоимость.
Устройство 2-х осевого электро-механического акселерометра (оригинал из книги «Introductory MEMS». Дальнейшие иллюстрации тоже взяты из этой книги)
У читателя наверняка возник вопрос: “как именно детектировать изменение емкости конденсатора?” Постараюсь дать на этот вопрос исчерпывающий ответ.
Устройство МЭМС акселерометра. Как превратить изменение емкости в сигнал?
Емкостной полумост
Итак прежде, чем описывать работу самого датчика, обратимся к довольно популярной схеме в схемотехнике – емкостному полумосту (Capacitive half-bridge).
Емкостной полумост — основа МЭМС-датчиков
Напряжения  и
и  являются входными, а
являются входными, а  – выходной сигнал для последующего преобразования. Емкости обоих конденсаторов зависят от внешнего ускорения, и изменяются на величину x(t). При x = 0, заряды на емкостях являются идентичными, и при этом
– выходной сигнал для последующего преобразования. Емкости обоих конденсаторов зависят от внешнего ускорения, и изменяются на величину x(t). При x = 0, заряды на емкостях являются идентичными, и при этом  . При условии, что x Вывод формулы для изменения емкости
. При условии, что x Вывод формулы для изменения емкости

Запишем через формулу емкости:

Упростив данные формулы, получаем следующее:

Учитывая условие, что x Вывод формулы зависимости выходного тока от изменения емкости

Учитывая тот факт, что ток является производной заряда dq/dt, а заряд q=CU, преобразуем данное уравнение в следующий вид:

Пусть потенциалы  , тогда исходя из формулы (1.1):
, тогда исходя из формулы (1.1):


Результат получился довольно странный: выходной ток никак не зависит от изменения емкости. Для того, чтобы детектировать изменение емкости, необходимо задавать на обкладках напряжения разной полярности, то есть:  , а
, а  . Тогда переделаем уравнение с учетом данной модификации.
. Тогда переделаем уравнение с учетом данной модификации.



Учитывая уравнение 1.2 для изменения емкости, получаем:

Из этого уравнения видны следующие факты:
- если положение пластин не меняется во времени, то

- аналогично если источник сигнала постоянный (DC), то


Для эффективной работы емкостного полумоста необходимо использовать переменные входные сигналы e1 и e2, смещение фаз между которыми будет равно 180 градусов (для того, чтобы потенциалы имели разный знак). Поэтому получаем следующий вид сигналов:


, где  – частота переменного сигнала (определяется на этапе разработки, в зависимости от полосы пропускания системы и нормальной работы механических емкостей).
– частота переменного сигнала (определяется на этапе разработки, в зависимости от полосы пропускания системы и нормальной работы механических емкостей).
Итак, мы получили уравнение (1.4), которое показывает, как изменение емкости конденсатора влияет на выходной сигнал системы. Однако такой сигнал будет довольно малый по амплитуде, к тому же если подключим к нему нагрузку для общения с внешним миром — вся система рухнет. Тут нужен усилитель…
Просто добавь усилитель
Добавим в нашу систему усилитель (будем считать, что коэффициент усиления —  — сл-но работает принцип виртуальной земли).
— сл-но работает принцип виртуальной земли).
Емкостной полумост + интегратор
Итак теперь найдем зависимость выходного напряжения усилителя от изменения емкости.

Ток через конденсатор  можно записать через изменение заряда dq/dt, поэтому исходя из полученного уравнения (1.4) получаем:
можно записать через изменение заряда dq/dt, поэтому исходя из полученного уравнения (1.4) получаем:

Данное уравнение показывает, что выходной сигнал зависит не только от положения обкладки x, но и от ее скорости движения (что не желательно). Для того чтобы компонента, вносимая скоростью, была незначительной, необходимо использовать высокочастотный входной сигнал (обычно такую частоту выбирают в районе 1 ГГц). Запишем компоненты уравнения как гармонические сигналы:

Выбираем частоту достаточно высокую, чтобы  :
:

Учитывая, что сигналы  и
и  имеют одинаковую частоту переходим к отношению их амплитуд:
имеют одинаковую частоту переходим к отношению их амплитуд:

В итоге мы получили зависимость выходного сигнала усилителя от изменения положения обкладки конденсатора. Внимательный читатель должен сразу обратить внимание – это же амплитудная модуляция! Действительно, в данной системе мы имеем сигнал x(t), который перемножается с сигналом  и усиливается на величину
и усиливается на величину  . Следующий шаг – убрать несущую частоту , и мы получим усиленный сигнал x(t) – который пропорционален ускорению. Долгий путь вычислений привел нас к пониманию архитектуры МЭМС-акселерометра.
. Следующий шаг – убрать несущую частоту , и мы получим усиленный сигнал x(t) – который пропорционален ускорению. Долгий путь вычислений привел нас к пониманию архитектуры МЭМС-акселерометра.
Архитектура МЭМС акселерометра
Рассмотрим сначала функциональную схему датчика:
Функциональная схема МЭМС-акселерометра
Изначально у нас есть сигнал x(t) – который отражает изменение ускорения. Далее мы перемножаем его с несущим сигналом и усиливаем с помощью операционного усилителя (в режиме интегратора). Далее происходит демодуляция – простейшая схема – диод и RC фильтр (в реальности используют усложненную схему, синхронизируя процесс модуляции и демодуляции одной несущей частотой ). После чего остатки шума фильтруются с помощью фильтра низких частот.
В качестве примера приведу один из первых МЭМС акселерометров компании Analog Devices – ADXL50:
Структурная схема ADXL50
Наверное, приведя структурную схему датчика в начале статьи многим читателям не было бы понятно назначения некоторых блоков. Теперь завеса приоткрыта, и можем обсудить каждый из них:
- Блок, который называется “MEMS sensor” – является емкостным полумостом.
- Блок “oscillator” генерирует сигнал на частоте 1ГГц.
- Сигнал осциллятора также используется для синхронной демодуляции.
- Выходной усилитель и дополнительные резисторы создают нулевую точку, относительно которой можно смотреть знак изменения ускорения (обычно это VDD/2- половина питания, для биполярных датчиков — «земля»).
- Внешняя емкость определяет полосу измерения системы.
- Внутреннего фильтра низких частот в данной схеме нет, но в современных схемах они имеются.
 определяет полосу измерения системы.
определяет полосу измерения системы.Какой преобразователь выбрать для работы с датчиками?
Выбор преобразователя для работы с датчиками зависит от точности, которую вы хотите получить. Для работы с датчиками подойдут АЦП с архитектурой SAR или Delta-Sigma с высокой разрядностью. Однако современные датчики обладают встроенными преобразователями. Лидерами этого направления являются STMicroelectronics, Analog Devices и NXP. В качестве примера, можно привести новую микросхему с 3-х осевым акселерометром и встроенным АЦП – ADXL362.
Структурная схема ADXL362
Для работы с АЦП в схему добавлены антиэлайзинговые фильтры, чтобы исключить попадания в спектр дополнительных гармоник.
Где достать такие технологии?
Сейчас для fabless компаний доступно множество фабрик, которые предлагают технологии МЭМС. Однако для создания современных микросхем требуется интегрировать емкости с подвижными пластинами в стандартный маршрут проектирования, ведь помимо такой емкости необходимо спроектировать дополнительные блоки (генератор, демодулятор, ОУ и тд) на одном чипе. В качестве примера можно привести фабрики TSMC и XFab, которые предлагают технологию для реализации МЭМС датчика вместе со всей обвязкой. На картинке представлены емкости, которые позволяют создать трехосевой акселерометр:
Трехосевой емкостной полумост от TSMC
В России также существует фабрика по выпуску МЭМС датчиков – “Совтест”, однако предприятие не обладает технологией интегрирования дополнительных схемотехнических блоков, которые необходимы для создания конечного устройства и единственный выход — применять технологию микросборки.
Какие наработки есть у нашей компании в этом направлении?
У нас есть несколько преобразователей, которые предназначены для работы с датчиками. Из новых продуктов это:
- 5101НВ035 – 16-канальный преобразователь на основе 8-ми Дельта-Сигма АЦП, предназначена для работы с токовыми датчиками
- 1316НХ035 – 4-х канальный интегрирующий преобразователь напряжение-частота (ПНЧ), предназначенный для работы с 3-х осевыми акселерометрами и гироскопами.
Как я писал в предыдущей статье, период ожидания пластин с фабрики может занять довольно долгий промежуток времени. После первого тестового запуска АЦП 400МГц, время прихода пластин и дальнейших измерений заняло более полугода. За это время наша команда успела сделать ПНЧ 1316НХ035 (развитие предыдущей схемы 1316ПП1У), о котором могу немного рассказать.
Преобразователь напряжение-частота
Для преобразования данных с датчика обычно используются SAR или delta-sigma АЦП, однако существует еще один тип преобразователей — интегрирующие ПНЧ, которые имеют существенные преимущества:
- Занимают меньшую площадь и имеет меньшее потребление при том же показателе линейности и шума.
- Простая архитектура.
- Высокая устойчивость к входному шуму и сигналам помех.
- Устойчивость к шуму и помехам выходного сигнала.
- Возможность передачи данных без обработки на радиочастотный канал связи.
Микросхема 1316НХ035 представляет собой четырехканальный преобразователь напряжения в частоту и цифровой код, к трем основным высокоточным каналам подключаются выходы трехосевого акселерометра. 4-ый канал имеет входной 4-канальный мультиплексор, к которому можно подключать дополнительные датчики системы: температуры, влажности и др. Под микроскопом схема выглядит так:
ПНЧ под микроскопом
Каждый из трех основных каналов преобразует входное напряжение в диапазоне ± 4В в частоту до 1250кГц на 3-х выходах, соответствующих положительному и отрицательному входным напряжениям. Также микросхема имеет в каждом канале 16 битный реверсивный счетчик, для подсчета частотных импульсов. SPI интерфейс служит для управления режимами преобразования и выборки содержимого счетчиков импульсов каналов. Основными требованиями к параметрам ПНЧ являлись:
- высокая термо и временная стабильность выходной частоты при нулевом входном сигнале (заземленных входах)
- динамический диапазон преобразования – не менее 22 бит
- непрерывность преобразования входного сигнала и недопустимость потери ни одного частотного импульса.
Для обеспечения требований 1 и 2 используется аналоговая автокалибровка, которая выполняется автоматически при включении схемы, а также может запускаться в любой момент по команде через SPI интерфейс. Требование 3 обеспечено и гарантируется схемотехническими решениями. Удалось достичь довольно приличных параметров точности: типовая нелинейность преобразования составила 30 ppm, а смещение нуля менее 0.1 Hz при коэффициенте преобразования 200 kHz/V. Динамический диапазон преобразования: fmax/fmin = 2*1.25МГц / 0.3Гц ∿ 8.33млн., что соответствует более 23 битам.
Есть только одно “но” – биполярное питание. Для обеспечения хорошей стабильности нуля (напряжение, которое соответствует ускорению 0g) необходимо использовать биполярное питание. Такое решение довольно эффективное – ведь когда 0g соответсвует “земля”, система априори будет стабильной. Также это улучшает проектирование системы. В современных датчиках в качестве нуля используют половину питания Vdd/2, однако если значение напряжения на преобразователе будет отличаться от напряжения на датчике – мы автоматически получаем смещение, которое нужно дополнительно калибровать.
Наверное, для многих потребителей биполярное напряжение немного отпугивает, и мы как разработчики это понимаем. Возможно, в дальнейшем сделаем коммерческий вариант для МЭМСов (или интегрируем датчик в ПНЧ). Пока, конечно, это всего лишь планы, но уверен они увидят свет.
Источник