Самодельный летающий дрон с камерой, который следует за вами на автопилоте (на основе Arduino)


В наши дни дроны — это очень популярные игрушки. На рынке можно найти профессиональные летающие дроны и дроны для любителей. У мастера, автора данной статьи, есть четыре беспилотника (квадрокоптеры и гекскоптеры), потому что он любит все, что летает, но 200-й полет не так интересен и становится скучно, поэтому он решил создать свой собственный дрон с некоторыми дополнительными возможностями. Мастер любит программировать на Arduino и проектировать схемы и гаджеты, поэтому он начал его строить. В самоделке использован контроллер полета MultiWii, основанный на чипе ATMega328, который также используется в Arduino UNO, поэтому программирование довольно простое. Этот беспилотник может быть подключен к смартфону на Android, который отправляет свои данные GPS на беспилотник, который сравнивает эти данные с его собственным сигналом GPS, а затем начинает следовать за телефоном. Поэтому, если двигаться по улице, дрон будет следует за вами. Конечно, есть много недостатков, однако дрон следит за телефоном, снимает видео, а также имеет ультразвуковой датчик расстояния, чтобы избежать препятствий в воздухе. Это особенности самодельного беспилотника.
Шаг 1: Основные свойства

Дрон работает почти полностью автоматически, вам не нужно управлять им, потому что он следует за вашим телефоном, который обычно находится всегда с вами, ультразвуковой датчик помогает обходить деревья, здания и другие препятствия, а GPS выдает очень точные данные о местоположении, но давайте посмотрим, что мы имеем в итоге:
— Аккумулятор 1000 мАч, хватает на 16-18 минут непрерывного полета;
— ультразвуковой датчик, чтобы избежать препятствий в воздухе;
— Модуль Bluetooth для получения данных с телефона;
— Микроконтроллер на основе Arduino;
— встроенный гироскоп;
— регулируемая максимальная высота (5 м);
— при низком заряде батареи, дрон автоматически падает на телефон; (желательно держать телефон в руках)
— затраты на постройку дрона около 100 долларов;
— можно запрограммировать на что угодно;
— с помощью GPS можно отправить беспилотник по любым координатам;
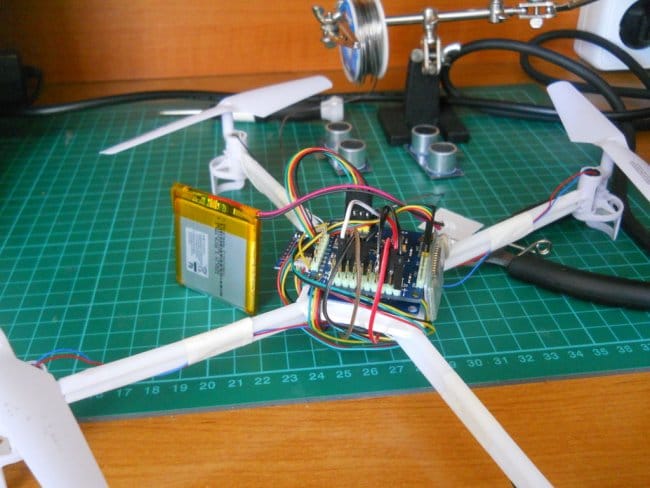
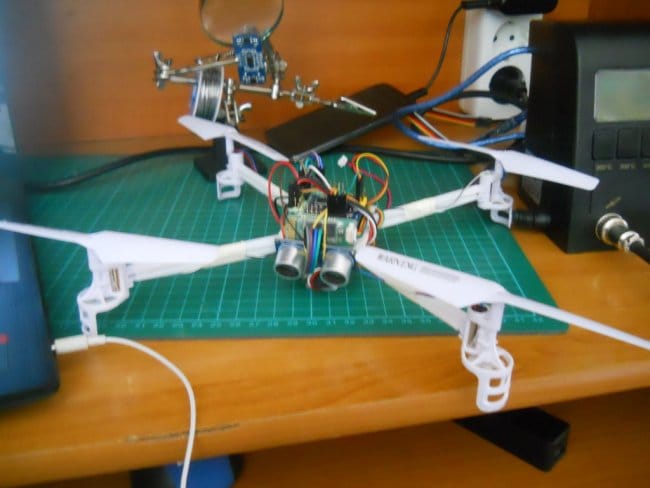
— дизайн в стиле квадрокоптера;
— оборудован 2-мегапиксельной видеокамерой 720p HQ;
— весит 109 г;




— Паяльник;
— Клей-пистолет;
— резец;
— Кусачки;
— Супер клей;
— Двухсторонняя клейкая лента;
— Резинки;
— MultiWii 32kB Flight Conroller;
— Модуль последовательного GPS;
— Серийный I2C конвертер;
— Модуль Bluetooth;
— Ультразвуковой датчик;
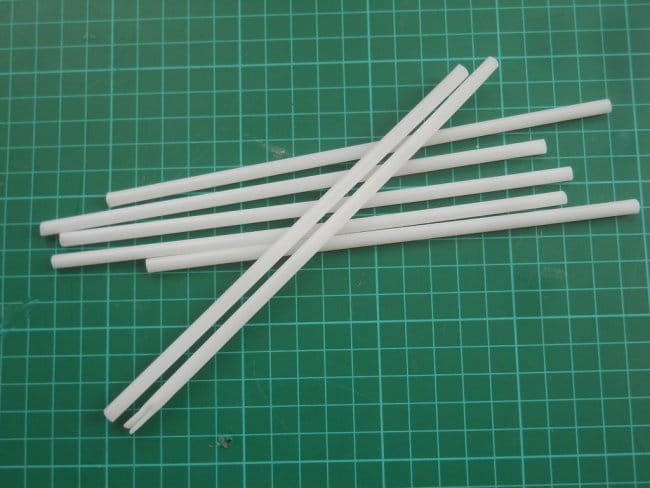
— Кусок жесткой пластмассы;
— Соломинки из кафе;
— зубчатая передача;
— Двигатели;
— Пропеллеры;
— Винты;
— L293D Motor Driver (это был неудачный выбор драйвера, будет исправлено во второй версии);
— 1000 мАч литий-ионный аккумулятор;
Шаг 3: Сборка пропеллеров
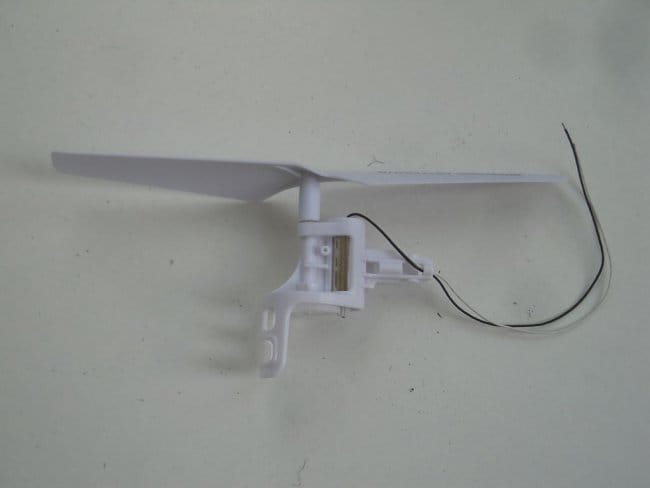

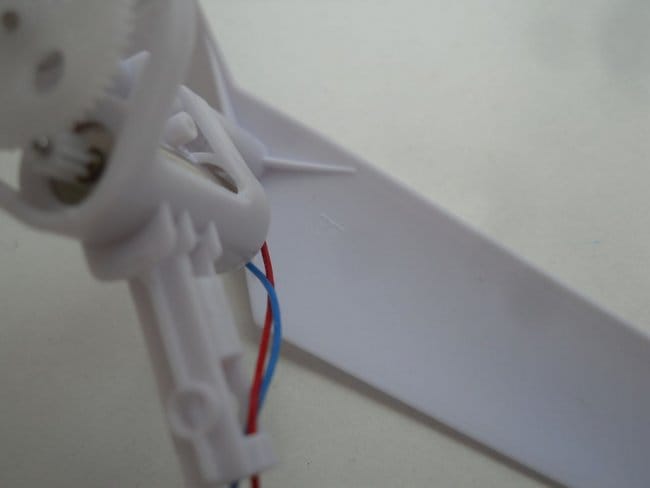

Мастер купил эти пропеллеры с моторами на Алиэкспресс, они являются запасными частями для дрона Syma S5X, но они оказались полезными и для данной самоделки.
Шаг 4: Принципиальная схема
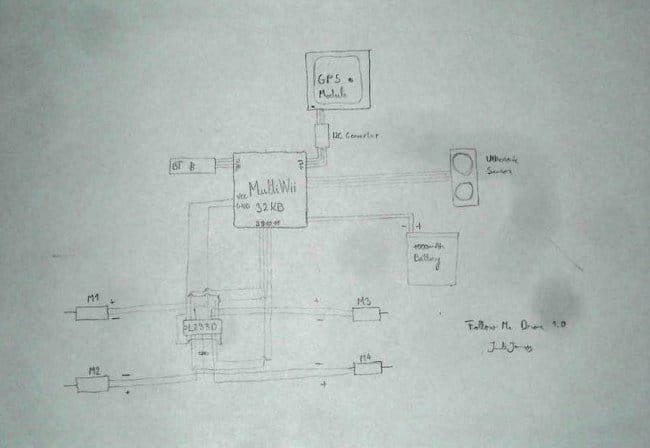
Всегда смотрите на схему во время работы и будьте осторожны со связями.
Шаг 5: Пайка двигателей к драйверу управления


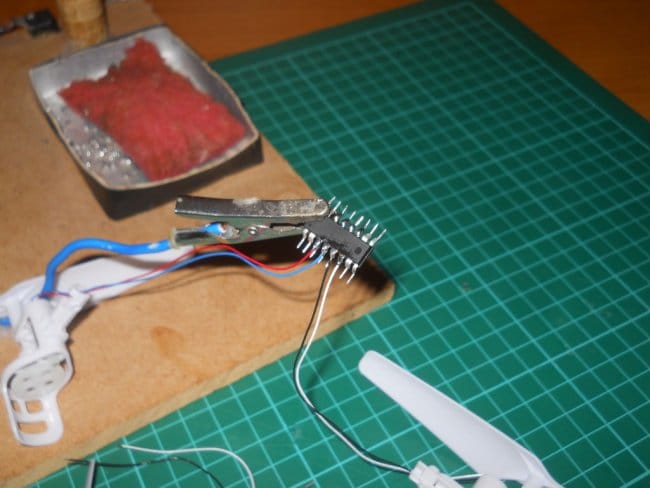

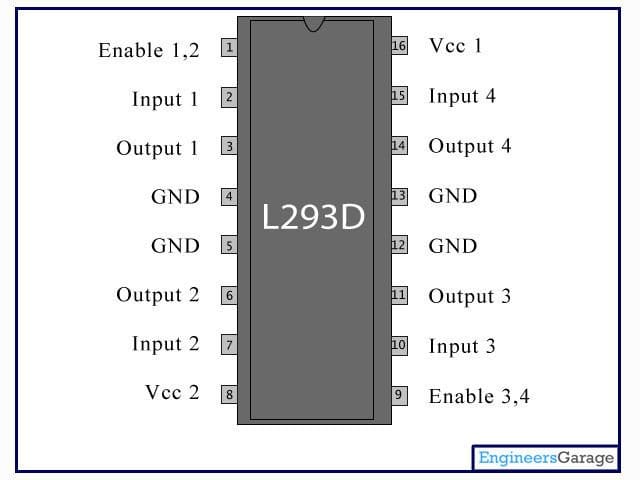
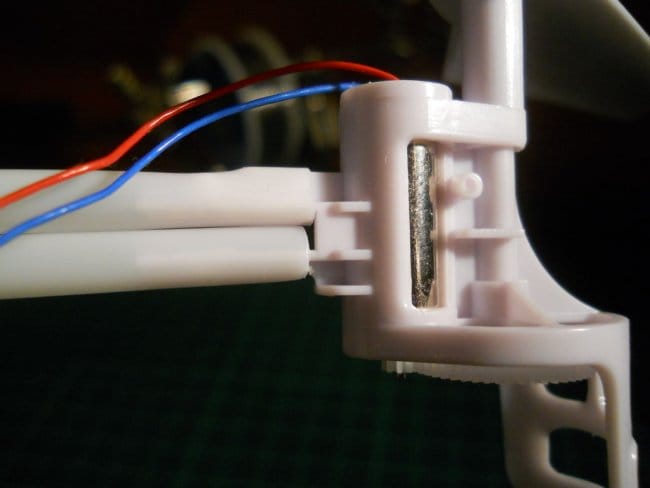
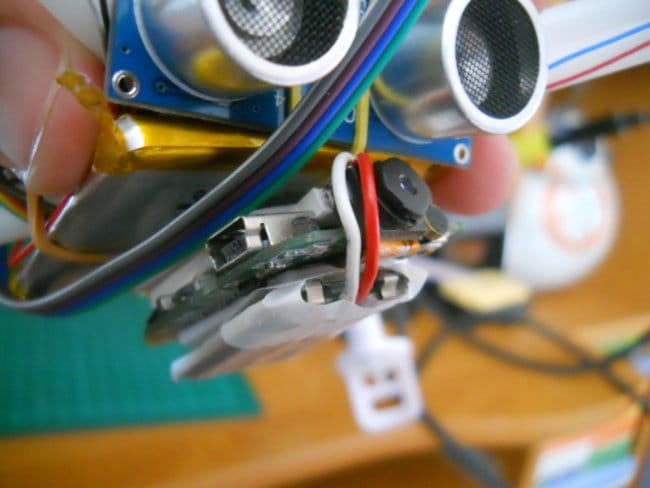
Теперь вам нужно спаять все кабели от двигателей до ИС драйвера двигателя L293D. Посмотрите на картинки, они говорят гораздо больше. Вы должны подключить черный и синий провода к заземлению и положительные провода к выходам 1-4. L293D может управлять этими двигателями, но мастер рекомендует использовать силовые транзисторы, потому что этот чип не может работать со всеми четырьмя двигателями при высокой мощности (более 2 А).


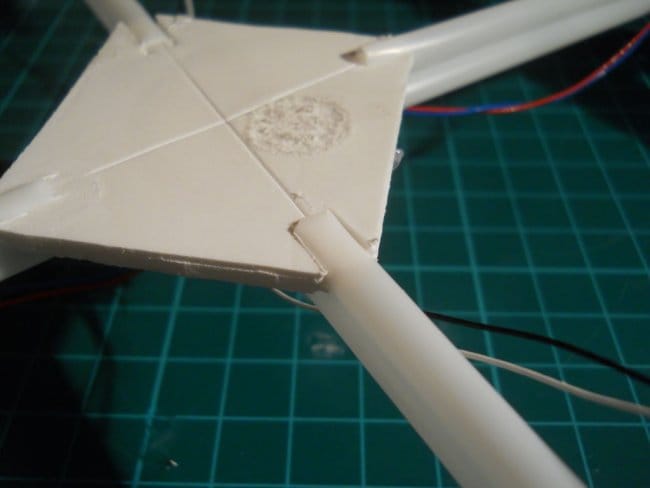
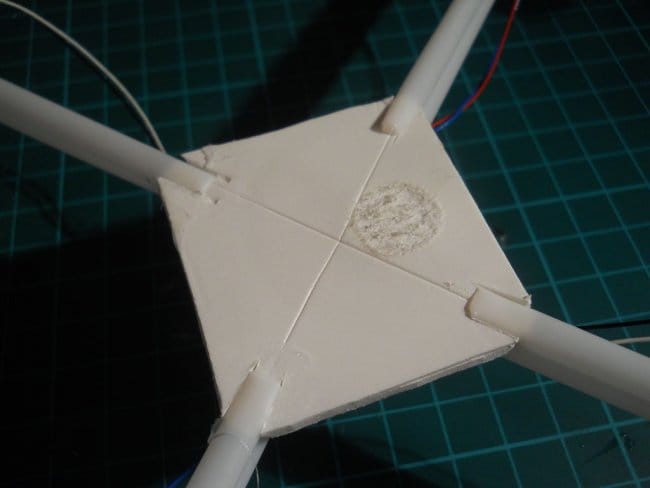
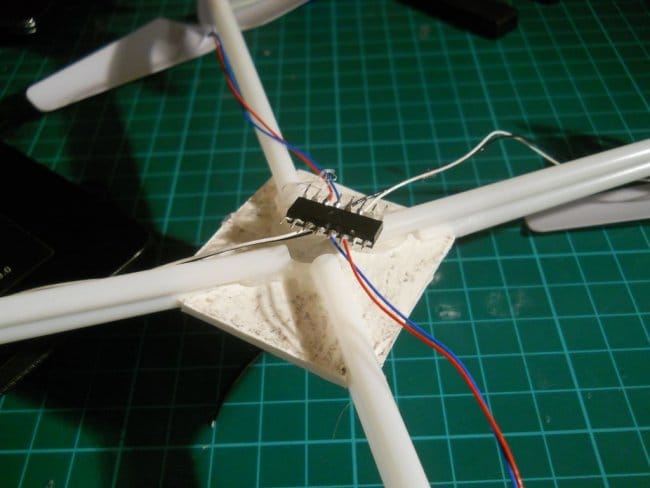
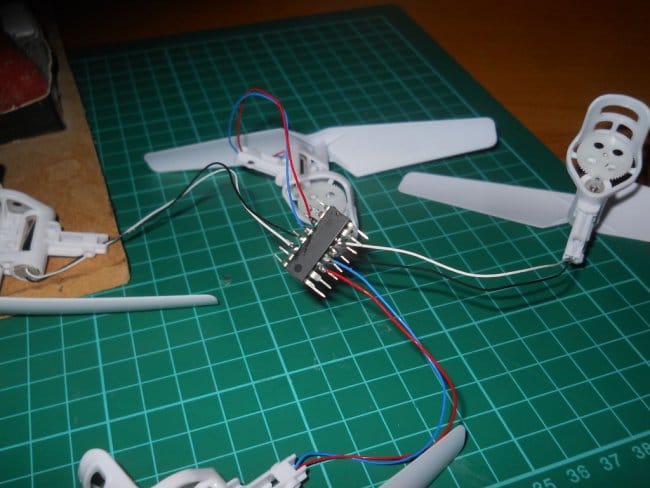
Пожалуйста, обратите внимание на вторую картинку, на которой показано, как оборудовать пропеллеры. Используйте крепкие трубочки-соломинки из кафе и кусок пластмассы для сборки рамы. Используйте немного горячего клея и супер клея для всех четырех винтов, затем проверьте соединения. Очень важно, чтобы пропеллеры находились на одинаковом расстоянии друг от друга.
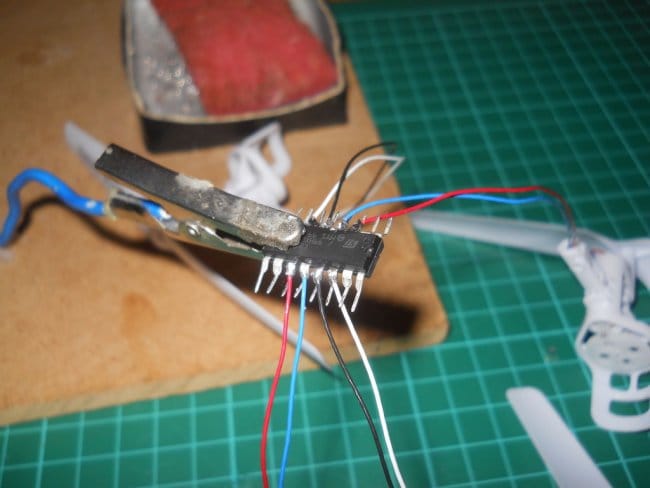
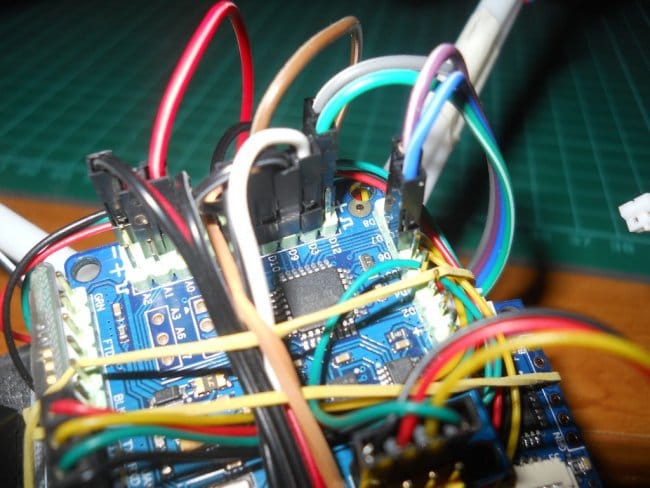
Шаг 7: Добавление проводов к драйверу L293D




Припаяйте провода к оставшимся контактам микросхемы. Это поможет подключить контакты Arduino к входам / выходам. Теперь пришло время построить схему.
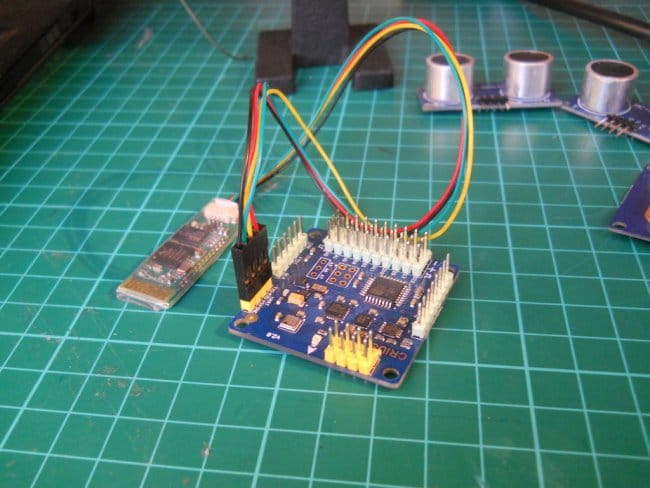
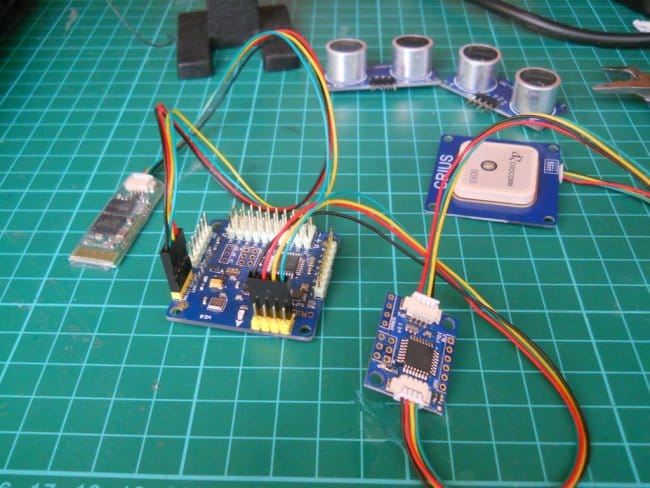
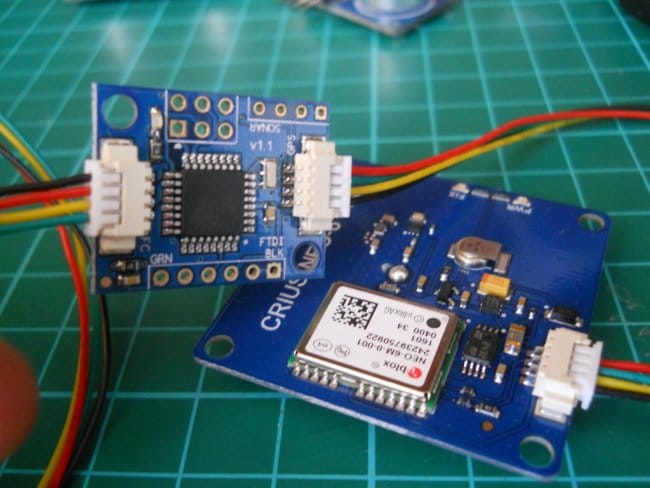
Все модули включены в комплект контроллера полета, который мастер заказывал заранее, так что просто нужно соединить их вместе. Bluetooth идет к последовательному порту, сначала GPS в преобразователе I2C, затем в порту I2C. Теперь данную схему можно установить на свой дрон.
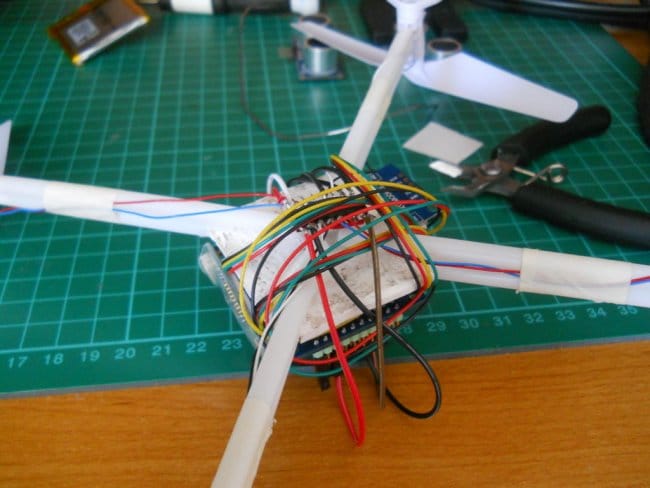
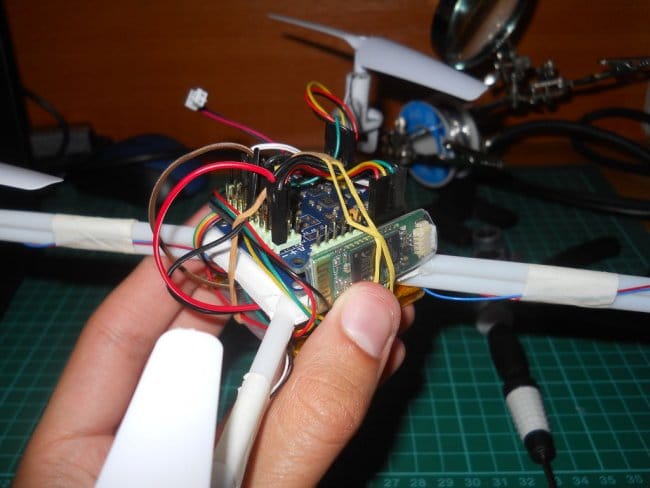
Шаг 9: Крепление электрической цепи к раме


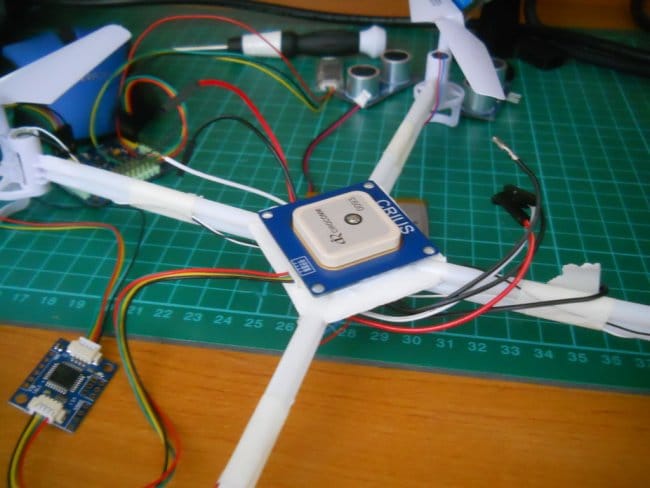
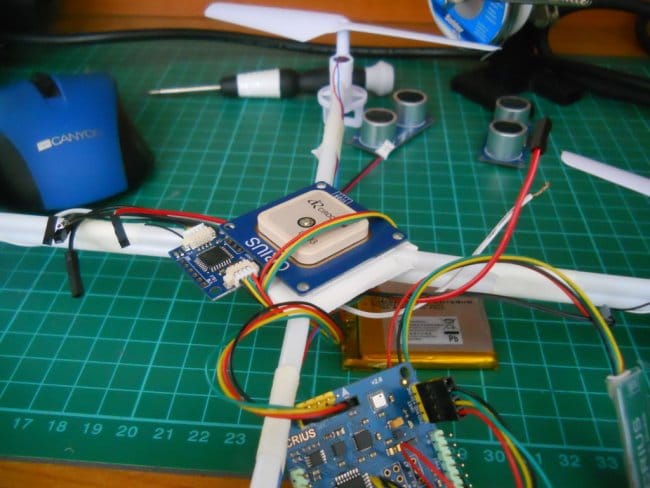

Используйте двустороннюю ленту и сначала добавьте GPS. Эта губчатая лента удерживает все на месте, поэтому приклейте каждый модуль один за другим на пластиковую деталь. По окончанию следует подключить контакты привода двигателей к MultiWii.
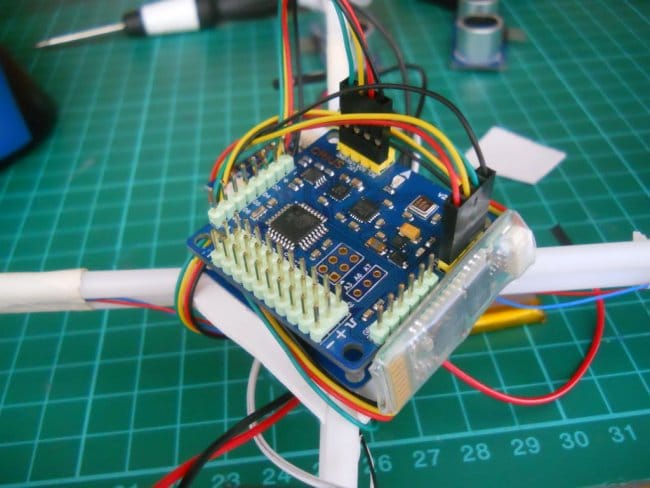
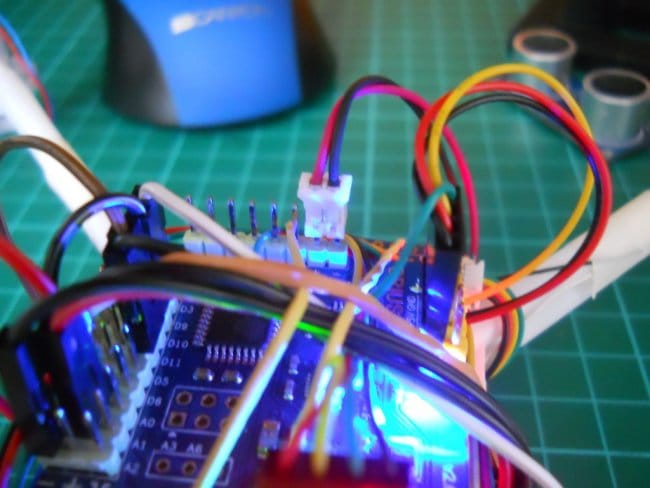
Шаг 10: Соединение двух цепей


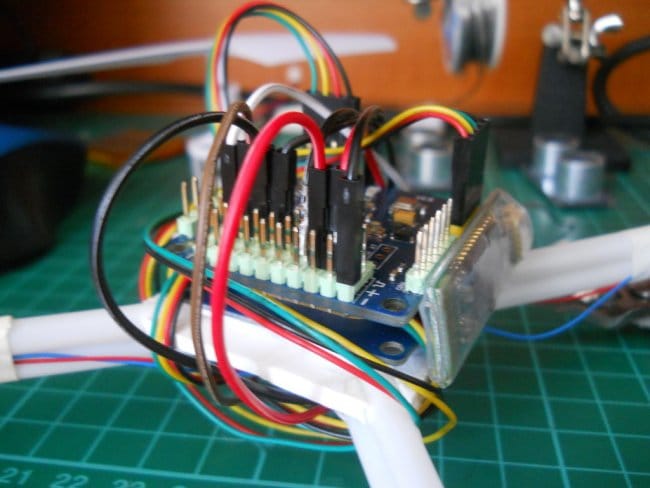
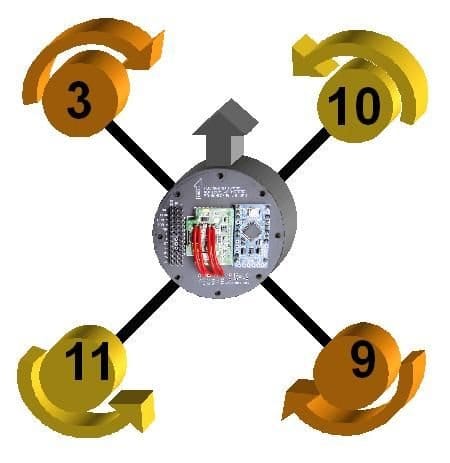
Входные контакты поступают на D3, D9, D10, D11, остальные должны быть подключены к контактам VCC + и GND.



Мастер использовал несколько резиновых лент, чтобы прикрепить батарею к дрону. Держится довольно крепко.
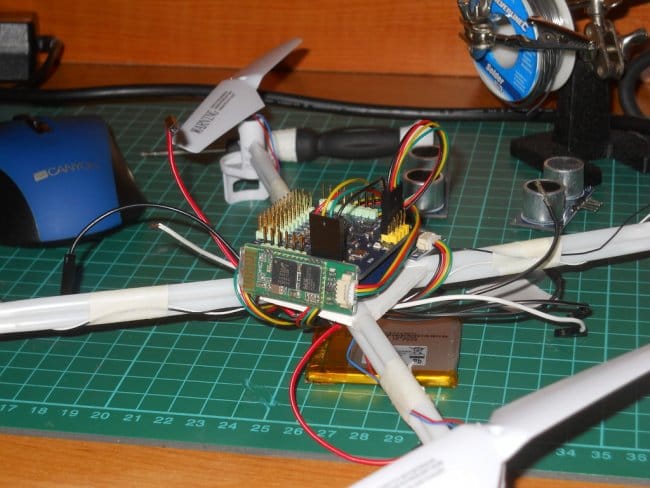
Шаг 12: Ультразвуковой датчик

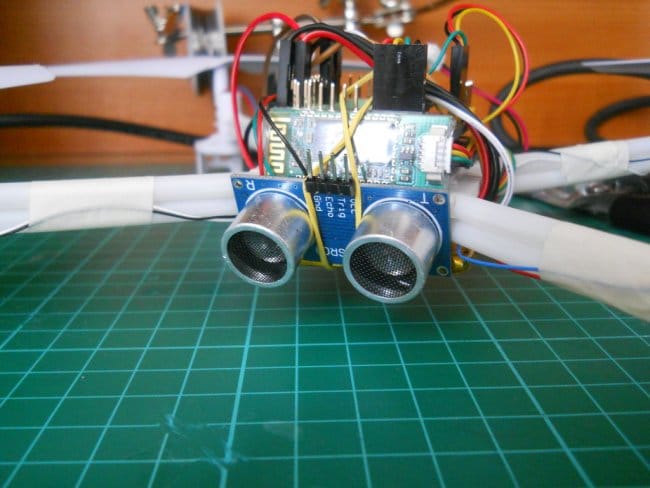
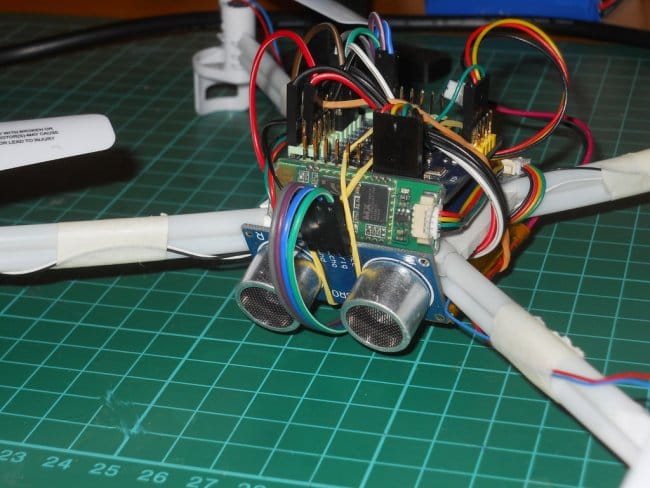
Датчик гидролокатора закреплен на дроне резиновой лентой и подключен к контактам D7 и D6 контроллера MultiWii.
Шаг 13: Программирование чипа
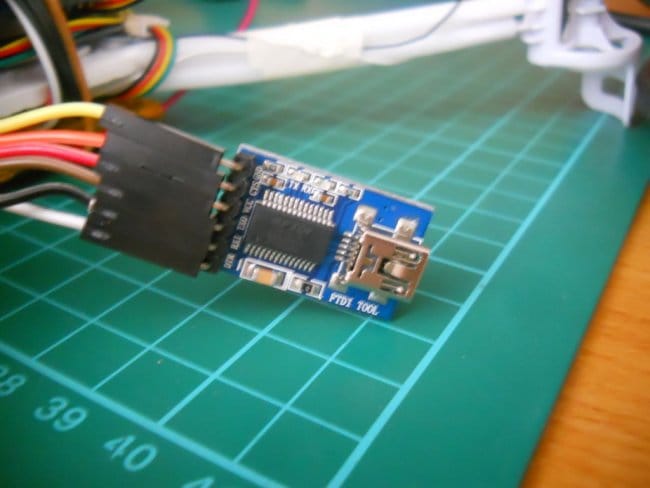
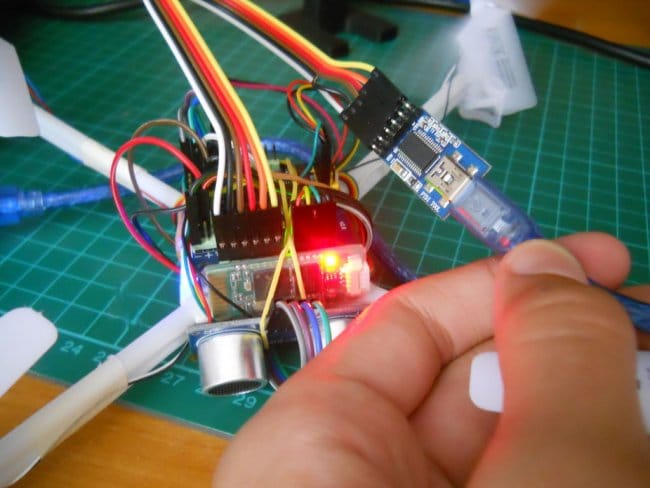
Вы должны использовать модуль Serial FTDI для программирования чипа. В комплект чипа входит модуль программатора.
Шаг 14: Программное обеспечение
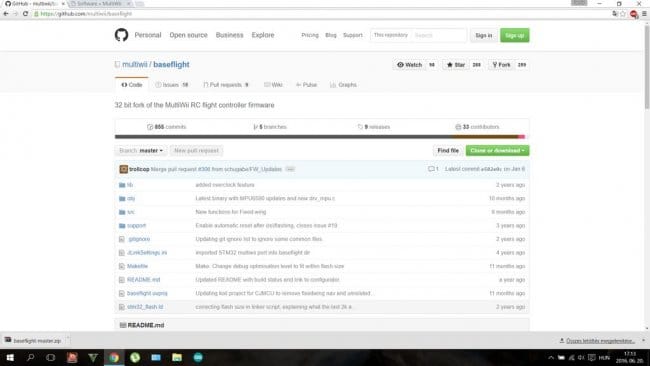
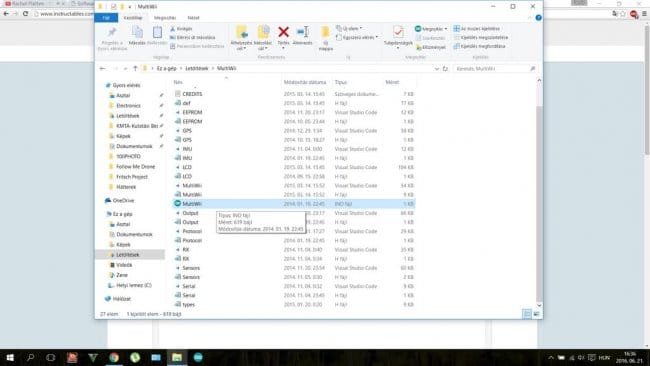

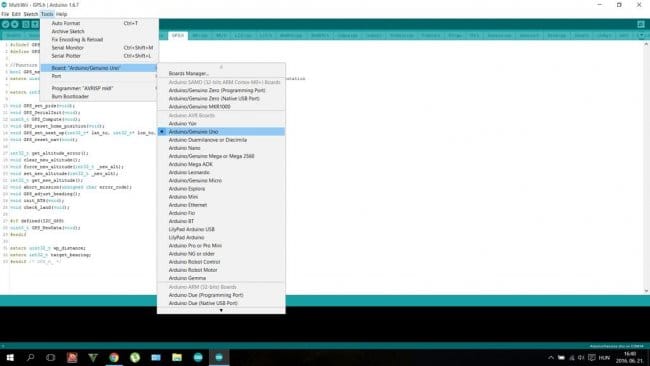
Мастер не знает, загружено ли программное обеспечение на чип или нет, но здесь он объясняет, что делать. Сначала загрузите официальную библиотеку MultiWii на свой компьютер. Извлеките файл .zip, затем откройте файл MultiWii.ino. Выберите «Arduino / Genuino UNO» и загрузите его на свой чип. Теперь ваш микроконтроллер имеет все предустановленные функции. Гироскоп, свет, Bluetooth и даже маленький ЖК-дисплей (который не используется в этом проекте) работает с загруженным кодом. Но этот код можно использовать только для проверки работоспособности модулей. Попробуйте наклонить дрон, и вы увидите, что моторы будут вращаться из-за гиросенсора. Нам следует изменить код контроллера, чтобы дрон следовал за телефоном.
Если вы можете запрограммировать Arduino или следовать инструкциям мастера, то сможете создать свой собственный дрон, который будет следовать за вами повсюду.
GitHub — ссылка на программное обеспечение
Шаг 15: Изменение кода
Мастеру пришлось изменить код датчиков и контроллера, который давал подсказки для ATMega328, но теперь модуль Bluetooth выдает три GPS-координаты, и в зависимости от них движется дрон.
Шаг 16: Приложение для телефона
Мастер использовал приложение SensoDuino, которое можно загрузить из плей маркет гугла. Подключитесь к дрону через Bluetooth и включите GPS TX и регистрацию данных. После этого приложение телефона готово.
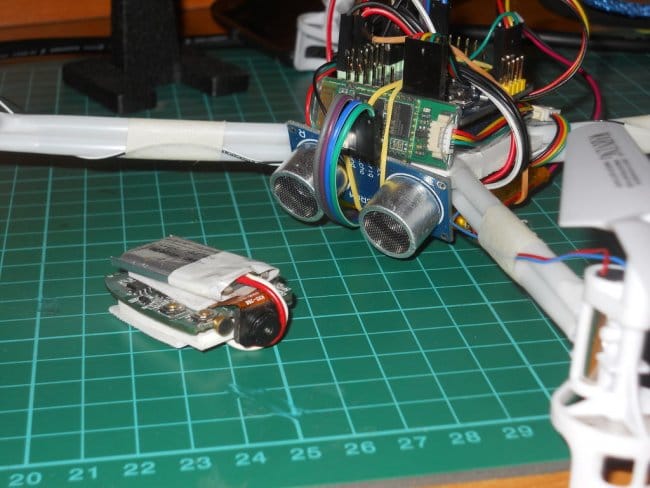
В качестве камеры использована дешевая китайская камера. Эта камера использовалась во многих проектах мастера и всегда показывала отличные результаты. Весит она всего 15 г и может снимать хорошее видео.
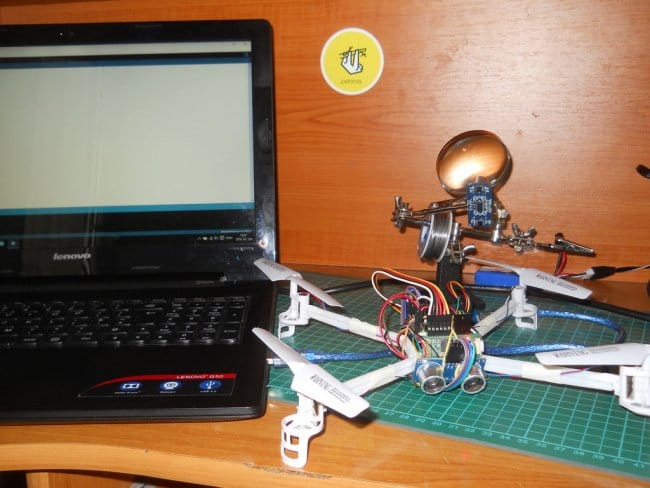
Шаг 18: Тестирование .



Расстояние соединения составило около 8 м, что более чем достаточно для такого беспилотника, как этот.
Источник
Беспилотник своими руками

Hubsan Spy Hawk — готовая модель беспилотника В нашем журнале мы неоднократно писали об устройствах, вобравших в себя все передовые достижения современных коммуникационных и вычислительных технологий, — беспилотных летательных аппаратах. Однако создание беспилотников — прерогатива не только государств, обладающих мощным военно-промышленным комплексом. В последние годы электронные комплектующие для авиамоделизма стали очень доступными. Чтобы собрать планер [. ]

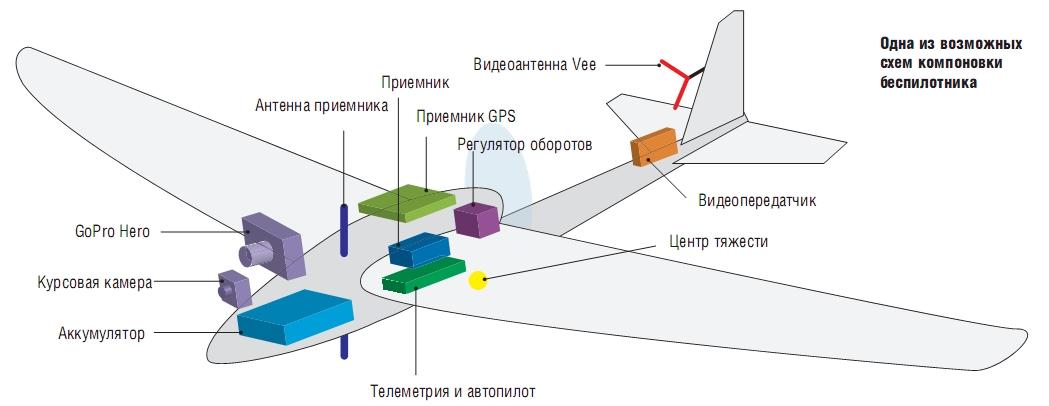
 Hubsan Spy Hawk — готовая модель беспилотника В нашем журнале мы неоднократно писали об устройствах, вобравших в себя все передовые достижения современных коммуникационных и вычислительных технологий, — беспилотных летательных аппаратах. Однако создание беспилотников — прерогатива не только государств, обладающих мощным военно-промышленным комплексом. В последние годы электронные комплектующие для авиамоделизма стали очень доступными. Чтобы собрать планер и оснастить его электронной «начинкой» с не самыми плохими характеристиками, требуется потратить меньше денег, чем стоит новый iPhone. В этой статье мы укажем отправные точки для создания беспилотного самолета, управляемого от первого лица с помощью установленной на нем камеры. В отличие от популярных сегодня вертолетов-квадрокоптеров такой аппарат может дольше держаться в воздухе и нести большую полезную нагрузку. Кроме камеры, служащей для контроля и управления, в подобный самолет можно установить высококачественную видеокамеру наподобие GoPro HD Hero и снимать впечатляющее видео высокого разрешения из-под облаков. Мы расскажем о том, где купить необходимое оборудование и как собрать модель, избежав подводных камней. Также вы узнаете, где можно приобрести готовые, не требующие сборки модели.
Hubsan Spy Hawk — готовая модель беспилотника В нашем журнале мы неоднократно писали об устройствах, вобравших в себя все передовые достижения современных коммуникационных и вычислительных технологий, — беспилотных летательных аппаратах. Однако создание беспилотников — прерогатива не только государств, обладающих мощным военно-промышленным комплексом. В последние годы электронные комплектующие для авиамоделизма стали очень доступными. Чтобы собрать планер и оснастить его электронной «начинкой» с не самыми плохими характеристиками, требуется потратить меньше денег, чем стоит новый iPhone. В этой статье мы укажем отправные точки для создания беспилотного самолета, управляемого от первого лица с помощью установленной на нем камеры. В отличие от популярных сегодня вертолетов-квадрокоптеров такой аппарат может дольше держаться в воздухе и нести большую полезную нагрузку. Кроме камеры, служащей для контроля и управления, в подобный самолет можно установить высококачественную видеокамеру наподобие GoPro HD Hero и снимать впечатляющее видео высокого разрешения из-под облаков. Мы расскажем о том, где купить необходимое оборудование и как собрать модель, избежав подводных камней. Также вы узнаете, где можно приобрести готовые, не требующие сборки модели.
Выбор самолета
При посещении реальных магазинов или сайтов, продающих радиоуправляемые модели, глаза разбегаются от разнообразия. Поэтому в первую очередь надо определиться с назначением вашего самолета. Если есть желание поставить на него камеру и летать «от первого лица», то безальтернативный выбор — электрические модели. Электрический привод дает меньше вибраций, чем бензиновый, и проще в обслуживании. Его можно собирать дома, «на коленке», не боясь испачкаться.
Помимо этого, если вы собираетесь летать далеко, высоко и, главное, долго (до одного часа), то вам однозначно нужен планер или его подобие. Если же хочется модель побыстрее и поманевренней, то выбирать нужно самолет с меньшей площадью крыла и, возможно, с бесхвостой аэродинамической схемой. Для длительных полетов с управлением через камеру винт должен располагаться сзади, а не спереди самолета. Таким образом, при съемке он не будет мелькать в кадре. К тому же при жесткой посадке вся винтомоторная группа останется цела.
Традиционные материалы для планера носят названия EPO или EPP. Первый — это некое подобие пенопласта, который не разъедается суперклеем и имеет большую жесткость, а второй — вспененный полиэтилен — обеспечивает общую легкость и жесткость модели. Преимущество этих материалов также в том, что они ремонтопригодны. Направление радиоуправляемого авиамоделизма, в котором полеты контролируются с помощью установленной на самолете камеры, называется FPV. Расшифровывается эта аббревиатура как First Person View, а переводится как «вид от первого лица». Самолеты класса FPV — это не красивые копии, а подчиненные своей задаче планеры, на который не ставят даже шасси. Каждый грамм веса здесь на счету, так как важно установить достаточно тяжелый емкий аккумулятор. Запуск таких самолетов производится с руки, а посадка — просто на фюзеляж.
Управление
Необходимый элемент для того, чтобы, сидя в кресле на земле, летать над облаками, — система управления. Она состоит из двух компонентов: пульта управления и приемника. Пульт — это передатчик управляющих сигналов.
Сегодня существует множество брендов этих устройств, различающихся по числу каналов и используемым частотам. Для простоты мы возьмем самый новый и распространенный на частоте 2,4 ГГц.
Что касается каналов, то каждый из них отвечает за определенное действие: газ, руль высоты, руль направления, управление сервоприводами камеры и т. д. Пульт покупается один раз и на много лет вперед, поэтому стоит задуматься о том, чтобы каналов было побольше — по крайней мере, не меньше шести.
Пульт управления — это одна из самых дорогих частей всего нашего беспилотного комплекса. Среди компаний-производителей наиболее популярны Futaba, JR и Spektrum. Есть, впрочем, и те, кто покупает китайские пульты (например, Turnigy) за 2000 рублей и вполне удовлетворены ими. Мы использовали семиканальный пульт Futaba. К каждому пульту необходимо устройство, которое принимает с него сигнал и отдает его на органы управления самолета, вертолета и т. д., то есть приемник. Он или идет в комплекте с пультом, или приобретается отдельно. Китайские приемники вполне неплохи, при этом стоят они раза в три меньше брендовых.
Радиус действия пультов на частоте 2,4 ГГц составляет в среднем километр. Это примерная дальность, при которой самолет еще различим невооруженным глазом.
Сборка
Налетавшись в авиасимуляторе и имея в шкафу пульт, приемник и самолет, можно начать сборку. Самое сложное, что, возможно, придется освоить, — это паяльник. Он потребуется часто, однако на первом этапе, скорее всего, нужно будет только перепаять разъемы — ради уменьшения веса самолета.
Итак, у вас есть пульт-передатчик, приемник и самолет. Для того чтобы управлять плоскостями самолета, необходимы сервоприводы. О том, какие именно подойдут для вашего самолета, вы можете спросить в магазине или узнать в специальных разделах на веб-сайте. Сервоприводы подсоединяются к приемнику.
Еще вам необходимы бесколлекторный двигатель и регулятор оборотов к нему. Именно регулятор отвечает за то, с какой скоростью будут крутиться лопасти винта, когда вы будете двигать рычажком. К регулятору же подключается аккумулятор. Кроме того, через него подается питание на приемник, а затем через приемник попадает на сервоприводы.
Собранную конструкцию необходимо сначала проверить на столе, не вставляя в самолет. Если все крутится и работает, можно помещать в модель. Аккумулятор — деталь, которая будет постоянно выниматься и меняться, так что к его установке необходимо подойти тщательно. Еще раз проверьте все детали, а также центровку. Расположение центра тяжести указано в инструкции к самолету. Это важный момент, и пренебрегать им нельзя.
Подсказка: центровка, немного сдвинутая вперед от обозначенной, поначалу даже поможет в пилотировании. После отцентровки и еще одной проверки всех систем можно провести пробный полет. Если все в порядке, самолет не сломался, не улетел в лес или речку, а цел и работоспособен, то можно задумываться о видеооборудовании.
Видеооборудование
Видеотехника, которая доступна в свободной продаже в отечественных и зарубежных магазинах, различается по мощности и частоте. Возможны следующие диапазоны частот: 900 МГц, 1,2 ГГц, 2,4 ГГц и 5,8 ГГц. Важно понимать, что частота видеотракта не должна совпадать с частотой управления, то есть в нашем случае вариант 2,4 ГГц можно исключить. В связи с доступностью оборудования хорошим выбором будет частота 1,2 ГГц.
После выбора частоты необходимо определиться с мощностью. Для этого параметра возможны варианты от 10 мВт до 2 Вт. Чаще всего используется 600–1000 мВт. Отметим, что мощность в 100 мВт не даст почти двукратного прироста дальности по сравнению с 600, а лишь на 20% и только на стандартных антеннах типа «штырь». Как правило, магазины предлагают среднюю мощность в 800 мВт.
Кроме того, нужны камера и антенны, а также питание. Камеру — простую маленькую черную коробочку с объективом — можно найти в магазине товаров для видеонаблюдения. У этого компонента есть несколько важных для вас параметров. Первый из них — рабочий вольтаж. Желательно использовать 12 В, как и для всего остального оборудования. Следующий параметр — количество ТВ-линий. Выбирать надо устройство с разрешением от 540 линий или выше — верхней границей может быть 700.
Очень важный момент — качество сигнала (и для видео, и для управления). Оно зависит в большей степени не от мощности передатчика, а от антенн. На самолете поставьте Vee-антенну, а на земле — направленную. Последняя даст огромный прирост в дистанции по прямой, однако направив такую модель себе за спину, вы потеряете сигнал. Также нужно понять, на чем смотреть передаваемую с самолета картинку. Для начала можно вывести провод с видеоприемника на простой телевизор — подойдет самое дешевое автомобильное ТВ-устройство, работающее от 12 В.
Собранную конструкцию опять проверьте на столе. Если на дисплее есть картинка, монтируйте камеру с передатчиком и аккумулятором на самолет, а приемник, телевизор, антенну и аккумулятор, например, на фотоштатив.
Важно: нельзя включать передатчик (и пульт управления, и видеопередатчик) без антенны — в таком случае все оборудование сгорит.
 Модель на заднем плане изготовлена из пеноплата EPO, и ее очень сложно разбить. Skywalker в центре выполнен из EPP
Модель на заднем плане изготовлена из пеноплата EPO, и ее очень сложно разбить. Skywalker в центре выполнен из EPP  На фотоштативе закреплены направленная антенна, телевизор, конвертер видеосигнала, передатчик для очков и аккумуляторы
На фотоштативе закреплены направленная антенна, телевизор, конвертер видеосигнала, передатчик для очков и аккумуляторы
Телеметрия
Телеметрия — важный элемент для полетов «по камере». Она позволяет выводить на экран множество полезных параметров, таких как заряд аккумулятора, потребляемый ток, высота полета, расстояние до точки старта, направление на точку старта, GPS-координаты, крен, тангаж, режим полета и другие, в зависимости от сложности OSD (On Screen Display). В последнее время появилось много простых решений, причем OSD комбинируется с автопилотом, который в случае обрыва связи из-за выхода за зону приема или просто по нажатию на кнопку вернет самолет в точку старта. Стоимость автопилотов начинается от 4500 рублей, что не так уж много, учитывая общую стоимость оборудования, — потерять самолет целиком обойдется намного дороже. Кроме того, автопилот предоставляет систему стабилизации полета, позволяющую расслабиться и получать удовольствие от созерцания окрестностей, не боясь порывов ветра или собственных ошибок пилотирования.
 Fat Shark — одна из популярных моделей очков с беспроводной передачей изображения и трекером положения головы
Fat Shark — одна из популярных моделей очков с беспроводной передачей изображения и трекером положения головы
Увеличение дальности полета
Есть два пути увеличения дальности — так называемая LRS (Long Range System — система дальнего действия) и усилитель самого пульта.
Система дальнего действия: Обычная частота LRS — 433 МГц. Данная система подключается к тренерскому разъему пульта управления. По сути, это еще один передатчик, на который с вашего пульта через кабель поступают сигналы, затем передающиеся на идущий в комплекте приемник с частой 433 МГц.
Усилитель пульта: подключается вместо штатной антенны. Он не потребует дополнительных приемников — можно использовать те, которые имеются.
Дополнительное оснащение
Картинку с OSD можно транслировать в видеоочки. Модели марки Fat Shark, стоимость которых начинается от 11 000 рублей, даже умеют отслеживать движение головы и управлять камерой на самолете. Конечно же, необходимо соблюдать технику безопасности, избегать «залетаний» за спину и стараться не летать там, где есть хоть малейшие сомнения в «национальной безопасности». Лучше всего производить полеты на открытой местности за городом.
Готовые модели
Если вам хочется побыстрее подняться в небо, то можно купить готовую модель для полетов с использованием камеры. Правда, возможностей у таких летательных аппаратов меньше.
AR.Drone 2  Квадракоптеры — летательные аппараты с четырьмя роторами — из-за своей простой конструкции часто используются в любительском моделировании. Они могут зависать на месте, что делает их подходящими для видеосъемки с высоты. Один из интересных образцов квадрокоптеров можно купить по цене около 13 000 рублей. AR.Drone 2.0 может управляться со смартфонов или планшетов. Время его полета составляет 15 минут, а дальность ограничена сигналом Wi-Fi.
Квадракоптеры — летательные аппараты с четырьмя роторами — из-за своей простой конструкции часто используются в любительском моделировании. Они могут зависать на месте, что делает их подходящими для видеосъемки с высоты. Один из интересных образцов квадрокоптеров можно купить по цене около 13 000 рублей. AR.Drone 2.0 может управляться со смартфонов или планшетов. Время его полета составляет 15 минут, а дальность ограничена сигналом Wi-Fi.
Сайт: ardrone2.parrot.com Hubsan Spy Hawk  Комплектов готовых моделей с управлением по принципу FPV существует множество. Один из них — Hubsan Spy Hawk. В наборе, который можно купить по цене около 12 000 рублей, имеется четырехканальный передатчик с дисплеем, позволяющий управлять моделью на расстоянии до 400 м. Модель оснащена камерой с разрешением пять мегапикселей. Сайт: hubsan.com
Комплектов готовых моделей с управлением по принципу FPV существует множество. Один из них — Hubsan Spy Hawk. В наборе, который можно купить по цене около 12 000 рублей, имеется четырехканальный передатчик с дисплеем, позволяющий управлять моделью на расстоянии до 400 м. Модель оснащена камерой с разрешением пять мегапикселей. Сайт: hubsan.com
Покупка комплектующих
Удобнее и дешевле покупать оборудование в интернет-магазинах. Заказы присылают по почте, а время ожидания составляет в среднем месяц. Мы перечислили только самые популярные марки и бренды. Разнообразного оборудования очень много, как и комбинаций сборки. Каждый может собирать конструкцию, опираясь на свой и чужой опыт.
Аппаратура управления: Futaba, JR, Spektrum Модели самолетов FPV: Bixler, Skywalker Видеооборудование: приемник-передатчик и камера, направленная антенна, телевизор Телеметрия: Надо сказать, что данный элемент при всех своих плюсах не всегда надежен и иногда отказывает. Для начала можно порекомендовать Storm cyclop, FY31AP или LRS 433. Имеет смысл присмотреться к их аналогам на следующих сайтах.
Источник