Моторизированная поворотная платформа для сварщика



Приветствую всех любителей помастерить, предлагаю к рассмотрению инструкцию по изготовлению незаменимой вещи для сварщика, это поворотная платформа. Самоделка представляет собой круглую платформу, которая способа вращаться в обе стороны, а еще есть возможность регулировки скорости вращения. Не это не все, платформа способна наклонятся на угол в 90 градусов, то есть, из горизонтального положения платформа может принимать вертикальное положение.
Управлять самоделкой можно при помощи педали, еще есть удобная панель управления с включателями. Само собой, есть и кнопка аварийного отключения стола. Если проект вас заинтересовал, предлагаю изучить его более детально!
Материалы и инструменты, которые использовал автор:
Список материалов:
— листовая сталь;
— кругляк;
— подшипники с обоймами;
— два редукторных мотора;
— цепная передача;
— блок питания нужной мощности (для моторов);
— квадратные трубы;
— колеса для тележек;
— резьбовые стержни, гайки, подшипники;
— кабель, включатели, педаль и пр.
Процесс изготовления самоделки:
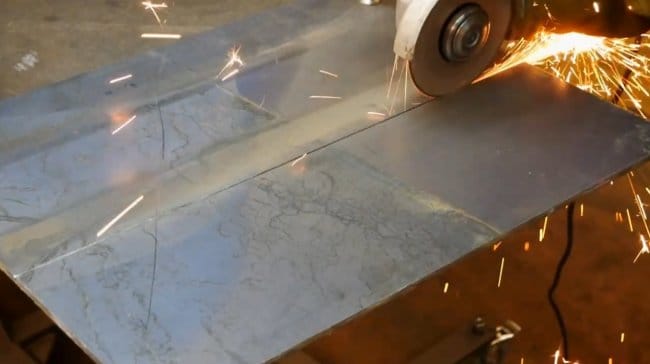
Шаг первый. Изготавливаем поворотный узел
Нарезаем листовую сталь и свариваем из нее короб. К этому коробу привариваем с обеих сторон кругляк, это будут оси, благодаря которым короб будет поворачиваться на угол в 90 градусов.
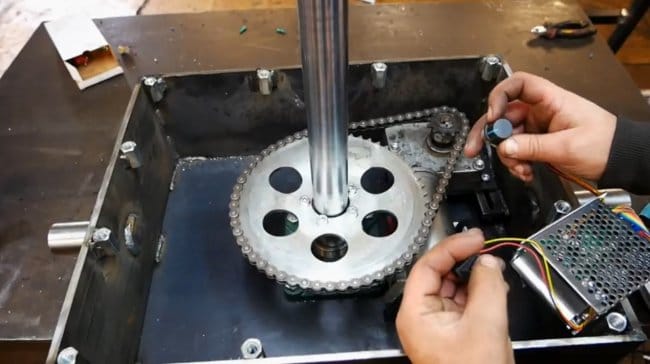
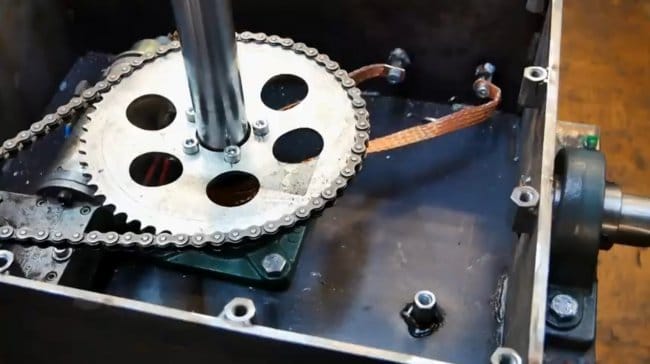
Внутри короба располагается редукторный мотор, именно он будет вращать круглую сварочную платформу. Крутящий момент передается через цепную передачу, она еще сильнее занижает обороты.
Внутри короба автор также расположил блок питания, который будет питать двигатель.
Ось вращается на подшипниках, а для установки крышки к корпусу приварены гайки.






































Шаг пятый. Покраска, сборка и испытания
Красим самоделку и сварочный стол можно собирать. Монтируем панель управления, здесь есть реверс, регулятор скорости вращения платформы, а также переключатель для регулировки угла наклона столешницы. При желании к столику подключается педаль и все управляется ногой.
Само собой, в доступном месте нужно поставить большую удобную кнопку аварийного отключения стола.
Источник
Как сделать вращающуюся платформу для сварочных работ

Когда приходится обварить детали по окружности, для удобства многие мастера используют поворотные столы.
Если нет возможности сделать или купить поворотный сварочный стол, можно изготовить своими руками вращающуюся платформу.
Идея самодельного приспособления принадлежит автору YouTube канала Andrii Pysarenko. Берите себе на заметку.
Какие материалы и запчасти потребуются:
- листовой металл;
- 3-х кулачковый токарный патрон;
- редуктор болгарки.

А в качестве привода вращающейся платформы можно использовать электродрель или аккумуляторный шуруповерт.
Основные этапы работ
Разбираем старую болгарку со сгоревшим двигателем, чтобы отсоединить от нее блок редуктора вместе с содержимым.


При необходимости надо будет заменить смазку внутри редуктора.
Далее для работы нам потребуется листовой металл.
Отрезаем заготовки подходящего размера, затем свариваем из них станину, к которой будет крепиться редукторный блок УШМ.

На следующем этапе вырезаем из листового металла круг, сверлим в нем отверстия, и крепим токарный 3-х кулачковый патрон.
К нижней части диска крепится зажимная гайка от болгарки.
Детали из листового металла необходимо зачистить и покрасить. После этого устанавливаем токарный патрон на вал редуктора болгарки.


Приводной вал редуктора зажимаем в патроне дрели или шуруповерта. Дополнительно из металла надо сделать простенький зажим-струбцину для фиксации кнопки.

Обратите внимание: чем сильнее будет зажиматься струбцина, тем быстрее будет вращаться платформа.
Если у вас есть предложения по доработке или улучшению конструкции, обязательно поделитесь своим мнением в комментариях.
Видео по теме
Подробно о том, как самостоятельно изготовить и собрать вращающуюся платформу для выполнения сварочных работ, вы можете посмотреть в авторском видеоролике ниже. Спасибо за внимание.
Источник
Поворотная платформа с дистанционным управлением для смартфона

Поворотная платформа с дистанционным управлением служит для того, чтобы иметь возможность записывать или снимать любое событие на смартфон под нужным углом. По сути это небольшой слайдер для фото/видеосъемки.
Для его сборки нужны следующие
Шаг второй: Ардуино и макетная плата
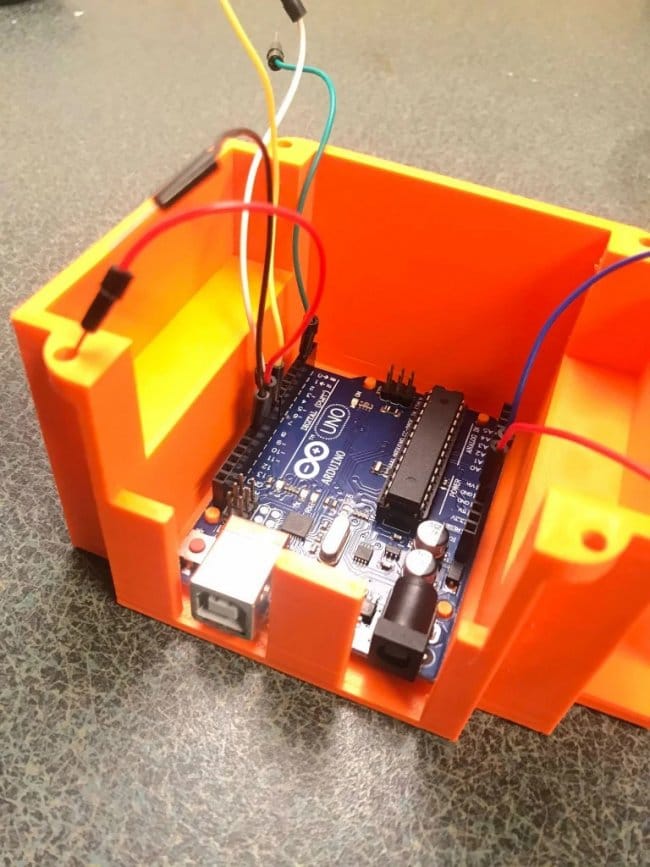
После печати деталей мастер устанавливает внутрь корпуса Ардуино. Внутри корпуса есть защелки, и плата надежно будет ими удерживаться.
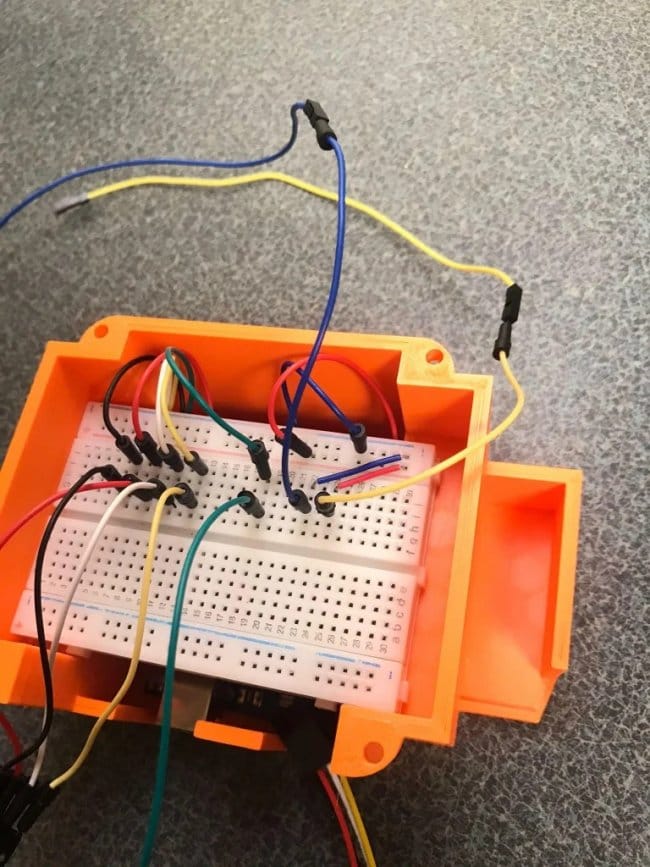
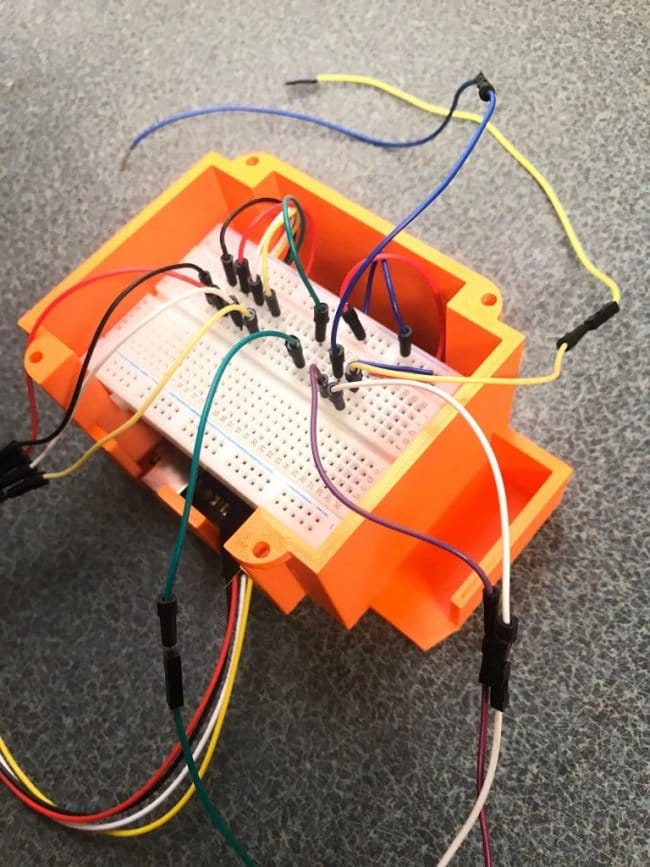
Дальше нужно установить перемычки на Ардуино. Устанавливаем красную перемычку к порту 5 В, синюю к минусу. Затем устанавливаем по порядку: 8, 9, 10, 11, 2 Arduino — желтый, белый, красный, черный, зеленый контакты.
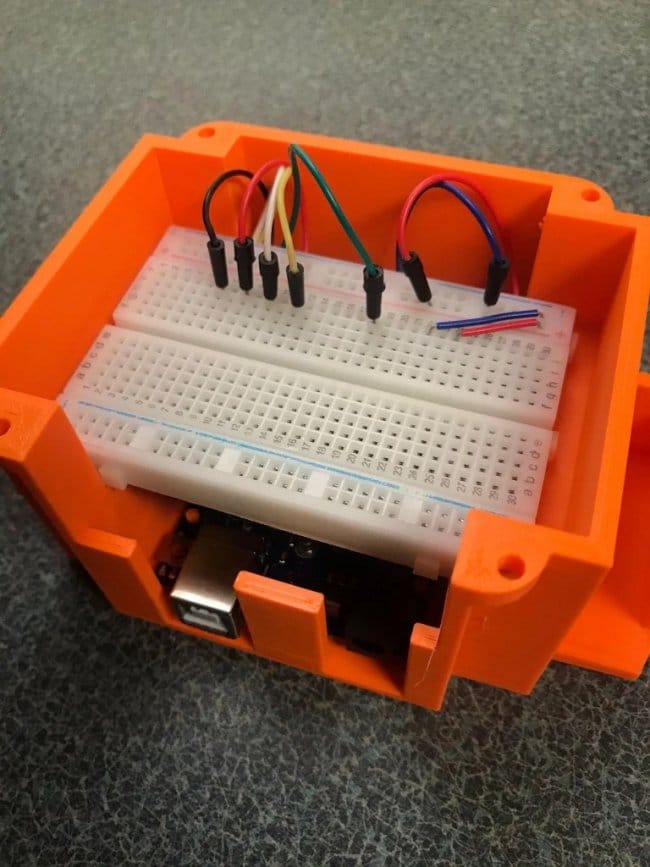
Как только контакты будут подключены к модулю Arduino, устанавливаем 30-рядную макетную плату прямо над Arduino. Подключаем красный контакт 5V к положительной (вертикальной) шине макетной платы, а синий контакт к минусу.
Затем подключаем зеленую, желтую, белую, красную и черную перемычки к контактам макета с правильным расстоянием между каждым контактом для правильной разводки.
Наконец, с помощью перемычек соединяем вертикальную и горизонтальную положительные шины. Так же соединяем шины минусовые.
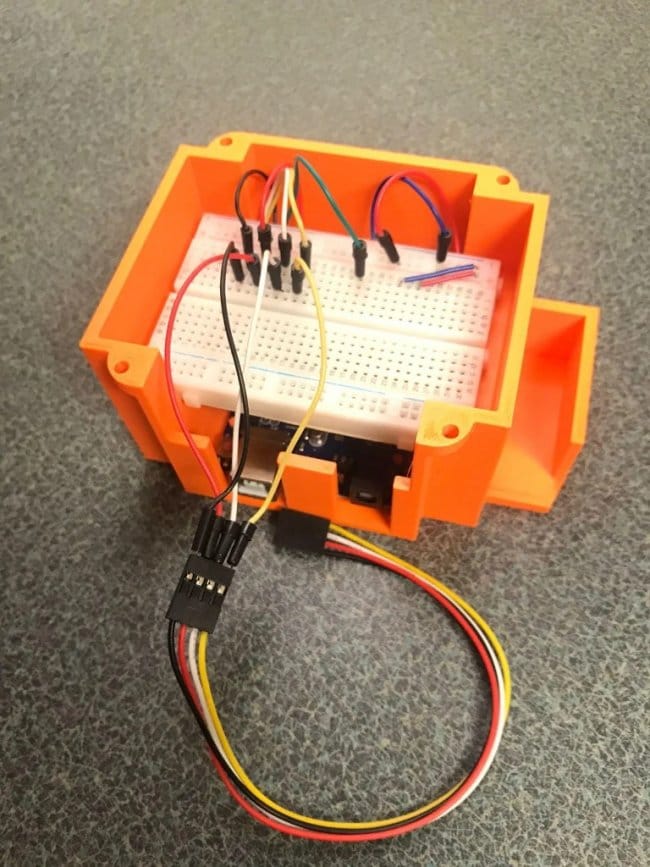
Теперь, используя еще 4 перемычки (желтую, белую, красную и черную), подключаем их их к одной и той же горизонтальной шине на макетной плате, чтобы цвета совпадали с ранее подключенными перемычками. К перемычкам подключаем разъем (так же по цветам).
Подключаем зеленую перемычку на одну шину с ранее установленной зеленой перемычки.
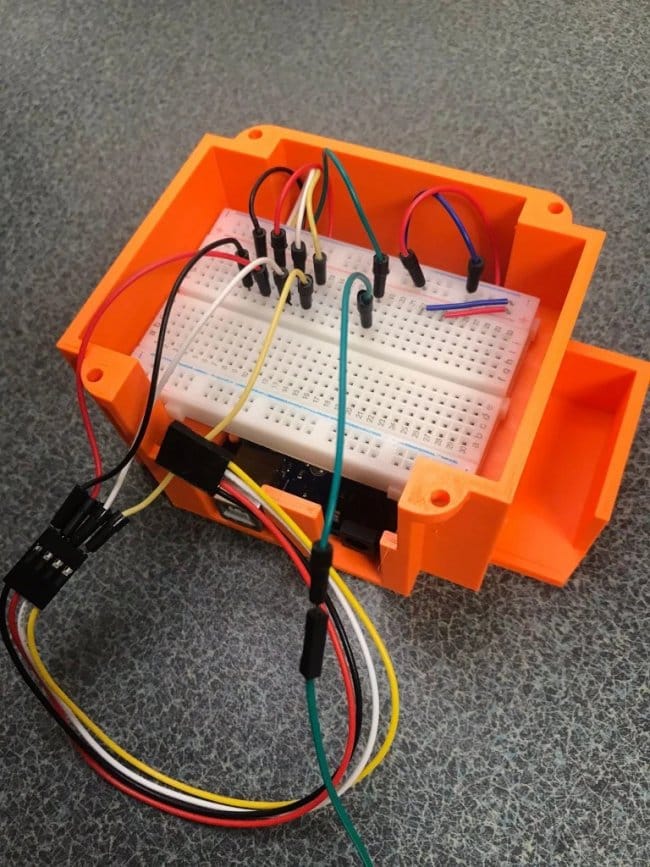
Дальше нам нужны еще четыре перемычки. Мастер использовал синие, желтые, белые и фиолетовые перемычки. Устанавливает их как на фото.
Последнее что нужно сделать в этом шаге — это установить перемычки 5В к белой и желтой перемычкам, минус к синей и фиолетовой.
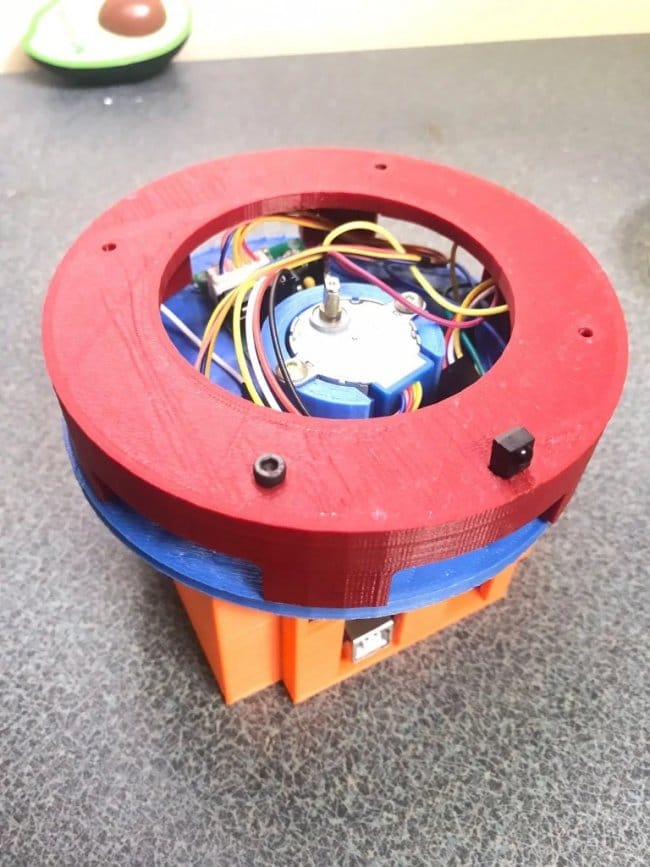
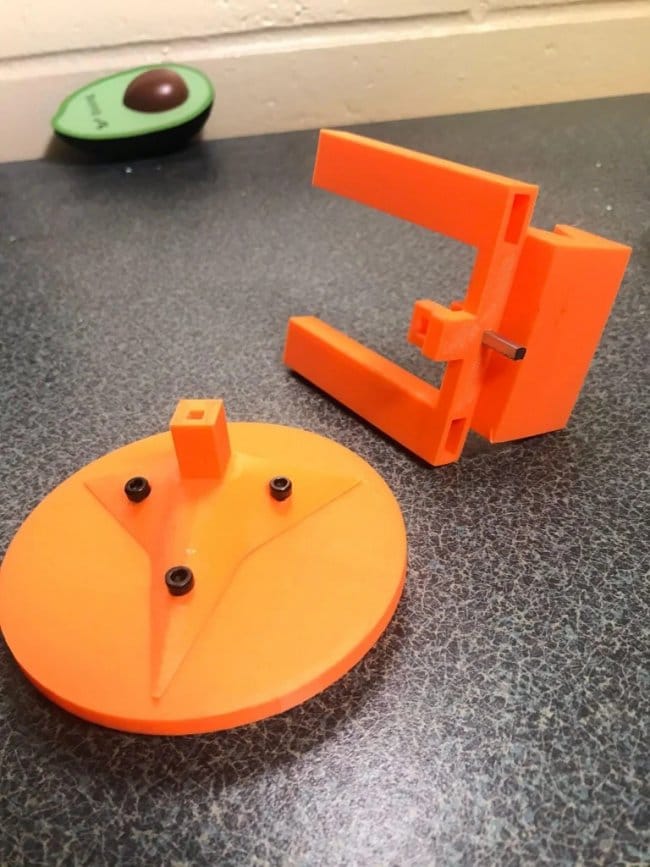
Шаг третий: шаговый двигатель
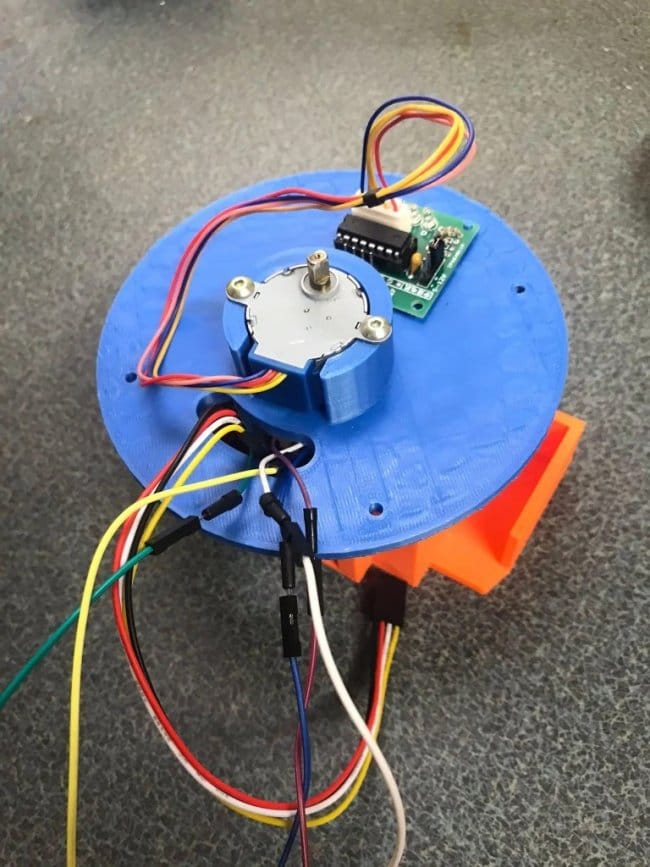
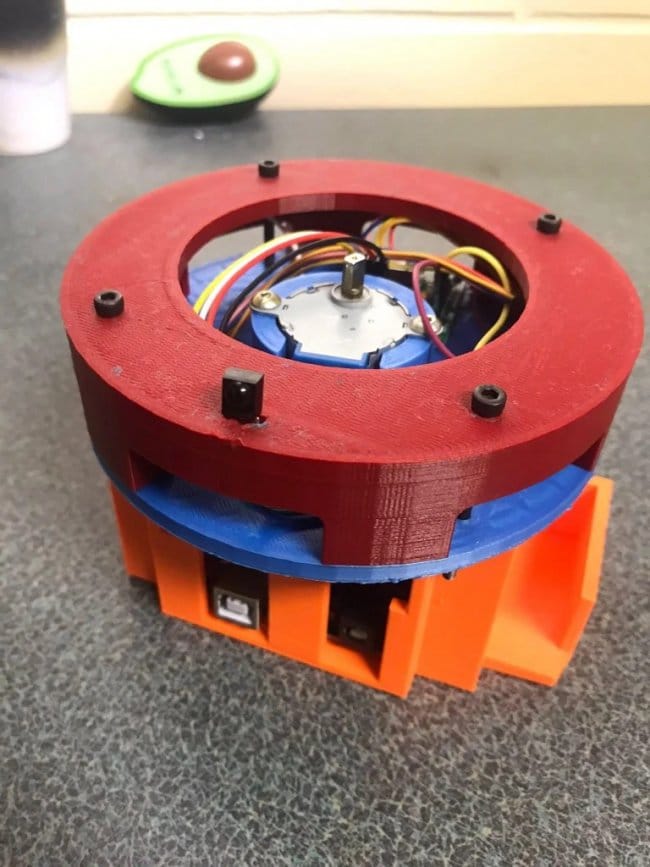
Следующий шаг — это установка шагового двигателя. Шаговый двигатель устанавливается в слот в напечатанной дискообразной детали. Затем фиксируется двумя винтами. Прикручивает плату драйвера шагового двигателя. Подключает провода, идущие от шагового двигателя к плате шагового двигателя, как показано на фотографии.
Затем протягивает провода от макетной платы в отверстие в диске.
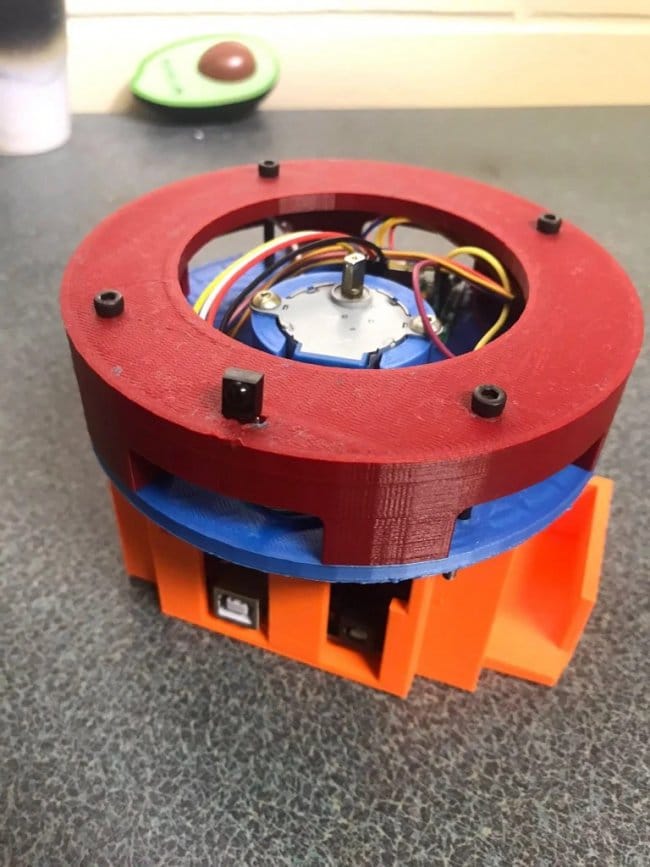
Дальше нужно все подключить.
4-х контактный разъем подключается к плате драйвера. Так же к плате подключаются желтый и коричневый провода. Желтый к «+», коричневый к «-«.

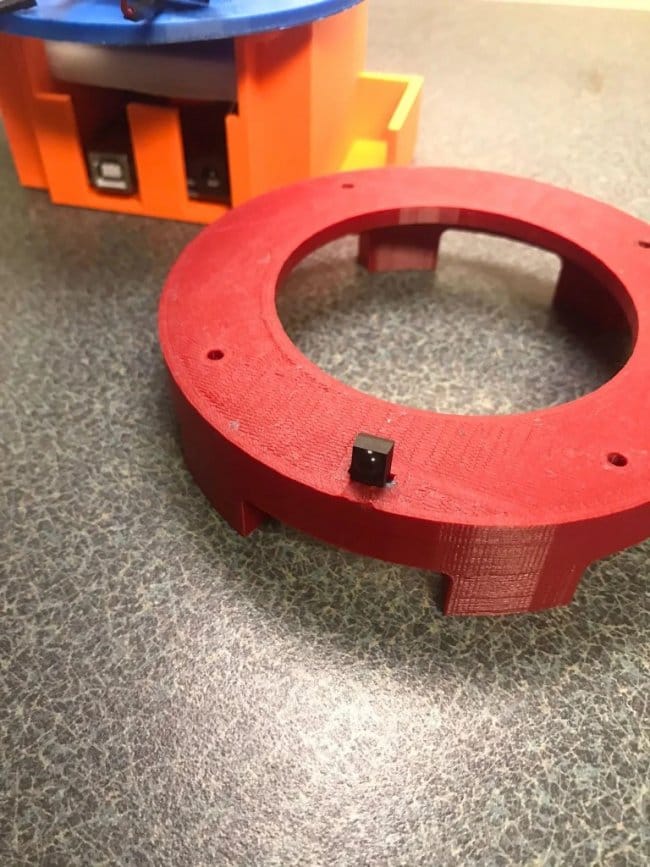
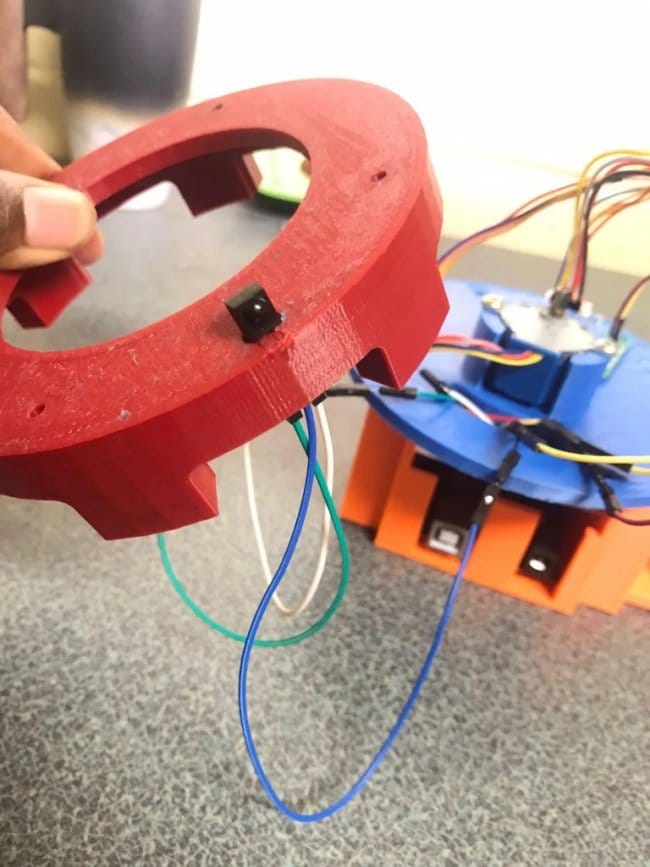
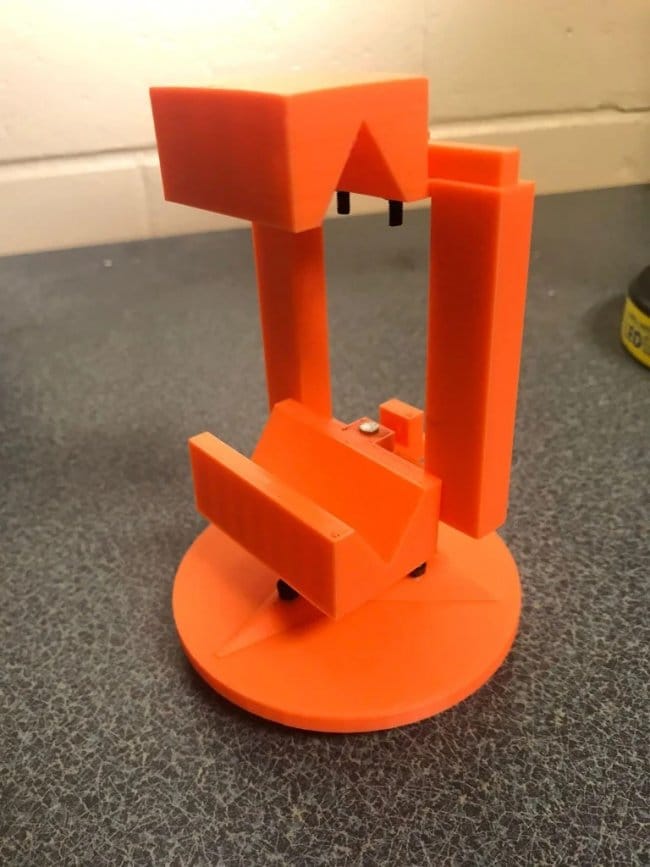
Шаг четвертый: установка ИК-датчика
Теперь нужно установить деталь красного цвета и на ней же крепится ИК-датчик. На плоской верхней части детали есть прямоугольная прорезь, специально для датчика.
Датчик устанавливается «лицом» наружу. При таком расположении левый контакт предназначен для сигнала, средний контакт подключается к минусу, а правый к источнику питания 5 В.
После подключения датчика, устанавливаем красную деталь сверху синей и прикручиваем к корпусу винтами.


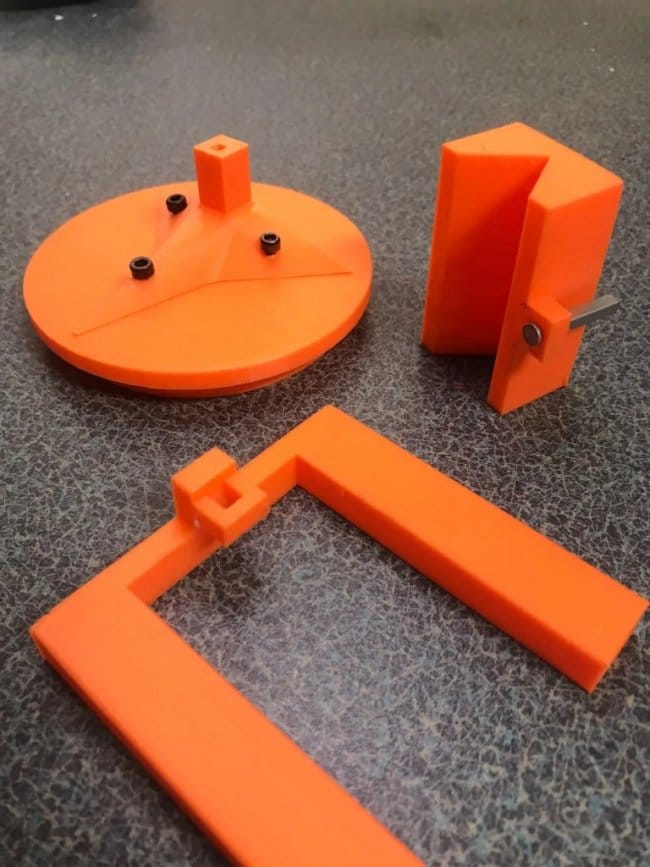

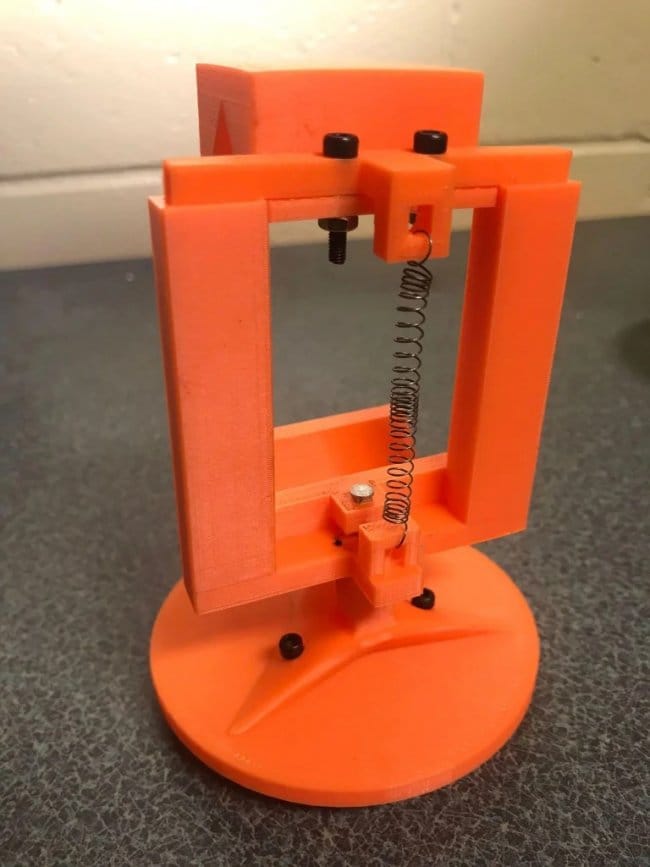
На этом этапе зажим и скоба зажима — это две последние детали, которые необходимо напечатать на 3D-принтере.
Чтобы скрепить две детали вместе, используем 2 оставшихся винта с шестигранной головкой M3x16 мм и 2 оставшихся шестигранных гайки M3x2,5 мм.
Затем эта деталь вставляется в полые направляющие стойки. И наконец, нужно надеть пружину.



Шаг седьмой: код
Прилагаемый код довольно прост и понятен. В файле Functions.ino содержится информация о том, как шаговый двигатель перемещается пошагово.
Другой файл arduino содержит весь код, необходимый для управления шаговым двигателем. Во-первых, необходимо загрузить файл заголовка шагового двигателя и файл заголовка IR Remote (версия 3.1.0).
Код включает в себя определенный список почти всех возможных ИК-сигналов, которые пульт ДУ может отправлять на ИК-датчик.
Functions.ino
RemoteControlledPhoneStand.ino
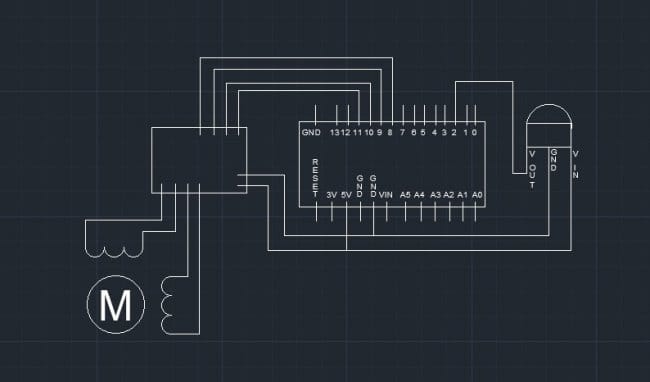
Шаг восьмой: принципиальная схема
Схема устройства несложная.
ИК-датчик (расположенный справа от схемы) подключен к контакту 2, 5V и заземлению Arduino. Этот датчик получает сигнал и отправляет его на Arduino, где он будет декодирован.
Шаговый двигатель подключен к плате шагового двигателя через четырехконтактный разъем, который управляет катушками в шаговом двигателе. Плата шагового двигателя также подключается к плате Arduino через контакты 5V и минус — в дополнение к подключению к плате Arduino через контакты 8, 9, 10 и 11.
Источник