- МозгоЧины
- Как сделать «дракона» своими руками
- Как сделать «дракона» своими руками
- Шаг 1: Нам понадобится
- Шаг 2: Проволочный каркас
- Шаг 3: Крылья
- Шаг 4: Лапы
- Шаг 5: Голова и шпатлевание
- Шаг 6: Доработка крыльев
- Шаг 7: Шипы
- Шаг 8: Окрашивание и лакирование
- Создаем робота в домашних условиях
- Введение
- Что нам нужно
- Делаем плату с МК
- Управление двигателями
- Датчики препятствий
- Прошивка робота
- Заключение
- О моём роботе
Сайт про изобретения своими руками
МозгоЧины
Сайт про изобретения своими руками
Как сделать «дракона» своими руками
Как сделать «дракона» своими руками

Доброго дня всем мозгочинам! Если вы знаете таких писателей как Энн Маккефри или Джордж Мартин, и являетесь поклонником их творчества, то определенно вам необходима самоделка этой мозгостатьи — дракон, сидящий на плече!
Собирается эта мозгоподелка всего лишь из проволоки, фольги, скотча и еще кое-какого «мусора». Это мои первые пробы в создании поделок такого рода, но скажу, что сделать подобную эффектную самоделку проще, чем это выглядит на первый взгляд.
Шаг 1: Нам понадобится
оцинкованная проволока разной толщины 16 и 20 (1.6мм и 0.88мм)
алюминиевая фольга
малярный скотч
шпатлевка-наполнитель (например Spackle, Polyfilla)
полимерная глина (к примеру Fimo или Sculpey)
тонкая хлопчатобумажная ткань
белый клей (ПВА)
краски и лак.
Шаг 2: Проволочный каркас
Из более толстой проволоки создаем каркас поделки — основу головы, шеи, туловища и хвоста. На данном этапе за основу головы вполне сойдет простая петля. Из небольших кусочков той же толстой проволоки согнутых в виде галочки «V» создаем передние и задние лапы, кончики которых загибаем петлями (очень полезны для этого острогубцы). Кусочками тонкой проволоки прикручиваем созданные лапы к каркасу туловища, при этом на проволоке не экономим, чтобы лапы держались прочнее. Пожалуй это самый «нудная» часть всей мозгозатеи. Возможно, лучший способ для этого, сначала обмотать тонкую проволоку вокруг одной из лапы, затем продолжить наматывать ее вокруг каркаса, а потом данную процедуру повторить для всех лап.
Как только все лапы будут прочно закреплены, начинаем придавать дракону форму, изгибая для этого лапы и туловище. Если вы хотите, чтобы ваша мозгоподелка сидела у вас на плече, то оставьте для этого достаточное пространство между лапами, и изогните хвост, чтобы он комфортно огибал вашу шею. Понятно, что чем толще проволока, тем она прочнее и лучше держит форму.
Далее начиная с задней части приступаем к созданию собственно тела дракона, и делаем это с помощью скомканной фольги и узкого малярного скотча. Можно непосредственно «наминать» фольгу на каркас, либо формировать из нее «мышцы» и скотчем крепить их к нему. Послойно добавляем фольгу и скотч в нужных местах, пока фигура не сформируется как нужно. Но не заканчиваем лапы, да и не слишком формируем область плеч, так как еще нужно прикрепить крылья.
Шаг 3: Крылья
Крылья проще сделать сначала отдельно, а уже потом прикрепить их к туловищу мозгодракона. Они, как и лапы, цельные. Из куска проволоки сгибаем два верхних «пальца» и предплечья крыльев. Оставшиеся пары «пальцев» делаем согнув посередине два куска проволоки, а затем, так же, как и крепили лапы к туловищу, прикручиваем их тонкой проволокой к верхним «пальцам».
После этого начинаем наматывать на крылья фольгу и скотч. На «пальцах» я обошелся только скотчем (без фольги), чтобы они оставались тонкими. А прежде чем формировать «бицепс» на крыльях не забываем прикрепить к ним небольшие отрезки тонкой проволоки, которыми крылья будут крепиться к туловищу.
Прикручиваем крылья к туловищу мозгоподелки и продолжаем лепить «мясо» на плечах и конечностях все теми же фольгой и скотчем,тем самым еще и укрепляя крылья на туловище. При этом следуйте своей «анатомической» интуиции, ведь кто знает как «функционирует» шестиконечное животное 🙂
Шаг 4: Лапы
Помните о тех петельках, которыми мы обозначили лапы? Вот теперь самое время чтобы сформировать на них «пальцы». Для этого к каждой лапе прикручиваем по две петли из тонкой проволоки и плотно оборачиваем их скотчем. Затем разрезав эти петли посередине у нас получится по 4 пальца на каждой лапе, их нужно выгнуть, подрезать до нужной длины, придать им требуемую форму используя мозгофольгу и мозгоскотч. Если присмотреться, то можно заметить, что кончики таких «пальцев» непокрыты и выступают словно когти. Это позволяет «дракону» цепляться за одежду, словно котенок.
Шаг 5: Голова и шпатлевание
Настал момент заняться головой!
Из полимерной глины делаем своему «дракону» извилистые рожки (конечно, если вы хотите чтобы они были) и «запекаем» их до готовности. А затем «по накатанной» — наворачиваем фольгу, скотч, в нужном месте рожки, пока голова самоделки не станет головой «дракона». Как я полагаю, на такой голове должны иметься надбровные дуги, массивная нижняя челюсть и небольшой подбородок. Для этого скручиваем короткие «свертки» из фольги и крепим их в нужном месте. Желательно иметь несколько картинок с драконами, чтобы иметь представление, как дракон-поделка должен выглядеть в конечном счете.
С намоткой все! Следующее действие обязательно необязательное, но рекомендуемое. Самоделку можно покрыть несколькими слоями шпатлевки-наполнителя, чтобы сделать «дракона» более гладким и скрыть морщинки и складки от скотча. Возможно вы захотите сделать это в течении нескольких дней, каждый раз сосредотачиваясь на какой-то одной детали мозгодракона и давая ей высохнуть. Можно также «прорисовать» шпатлевкой мелкие детали, если вы умеете это делать.
Имейте ввиду, что наложив шпатлевку и дав ей высохнуть, дракон потеряет возможность менять форму, или будет при таком изгибании трескаться, поэтому будьте уверены перед наложением шпатлевки, что его форма вас устраивает.
Шаг 6: Доработка крыльев
Используя ножницы и бумагу вырезаем перепонки крыльев (можно грубо), а затем переносим этот шаблон на тонкую хлопчатобумажную ткань, в качестве которой можно взять старую простыню или образец из магазина тканей, ну или что-то подобное.
После этого пропитываем тканевые перепонки в клее ПВА и драпируем ими крылья мозгоподелки, зажав ее прищепками до полного высыхания клея. Лишнее обрезаем ножницами и придаем окончаниям перепонок нужный вид. Полагаю, что на крыльях драконов должны иметься одно или даже два разрыва.
Шаг 7: Шипы
Как правило, у драконов имеются шипы различных форм, и я даже не предполагаю каково их эволюционное назначение, но они все же имеются. Из полимерной глины лепим шипы разных видов и размеров, а потом запекаем их.
Для того, чтобы прикрепить эти шипы, саморезом «высверливаем» в нужных местах отверстия в наполнителе и скотче, окунаем шипы в клей и вставляем в отверстия.
Шаг 8: Окрашивание и лакирование
В подробности окрашивания мозгодракона я не буду, я не достаточно опытен в этом деле, да и уже есть большое количество руководств по раскрашиванию фигурок. Свою самоделку я покрыл несколькими слоями гипса, чтобы сгладить наполнитель, а затем окрасил бронзовой аэрозольной краской двух оттенков. Живот и шипы покрасил белым акрилом оттенка слоновой кости, я для реалистичности нанес еще сухой щеткой немного черного акрила.
И после того, как покрыл всего мозгодракона несколькими слоями лака-спрея, приклеил ему глаза, в качестве которых выступили стразы.
Эпическая поделка готова, надеюсь было интересно!
Источник
Создаем робота в домашних условиях
Наверняка, насмотревшись фильмов про роботов, тебе не раз хотелось построить своего боевого товарища, но ты не знал с чего начать. Конечно, у тебя не получится построить двуногого терминатора, но мы и не стремимся к этому. Собрать простого робота может любой, кто умеет правильно держать паяльник в руках и для этого не нужно глубоких знаний, хотя они и не помешают. Любительское роботостроение мало чем отличается от схемотехники, только гораздо интереснее, потому что тут так же затронуты такие области, как механика и программирование. Все компоненты легкодоступны и стоят не так уж и дорого. Так что прогресс не стоит на месте, и мы будем его использовать в свою пользу.
Введение
Итак. Что же такое робот? В большинстве случаев это автоматическое устройство, которое реагирует на какие-либо действия окружающей среды. Роботы могут управляться человеком или выполнять заранее запрограммированные действия. Обычно на роботе располагают разнообразные датчики (расстояния, угла поворота, ускорения), видеокамеры, манипуляторы. Электронная часть робота состоит из микроконтроллера (МК) – микросхема, в которую заключён процессор, тактовый генератор, различная периферия, оперативная и постоянная память. В мире существует огромное количество разнообразных микроконтроллеров для разных областей применения и на их основе можно собирать мощных роботов. Для любительских построек широкое применение нашли микроконтроллеры AVR. Они, на сегодняшний день, самые доступные и в интернете можно найти много примеров на основе этих МК. Чтобы работать с микроконтроллерами тебе нужно уметь программировать на ассемблере или на Cи и иметь начальные знания в цифровой и аналоговой электронике. В нашем проекте мы будем использовать Cи. Программирование для МК мало чем отличается от программирования на компьютере, синтаксис языка такой же, большинство функций практически ничем не отличаются, а новые довольно легко освоить и ими удобно пользоваться.
Что нам нужно
Для начала наш робот будет уметь просто объезжать препятствия, то есть повторять нормальное поведение большинства животных в природе. Всё что нам потребуется для постройки такого робота можно будет найти в радиотехнических магазинах. Решим, как наш робот будет передвигаться. Самым удачным я считаю гусеницы, которые применяются в танках, это наиболее удобное решение, потому что гусеницы имеют большую проходимость, чем колёса машины и ими удобнее управлять (для поворота достаточно вращать гусеницы в разные стороны). Поэтому тебе понадобится любой игрушечный танк, у которого гусеницы вращаются независимо друг от друга, такой можно купить в любом магазине игрушек по разумной цене. От этого танка тебе понадобится только платформа с гусеницами и моторы с редукторами, остальное ты можешь смело открутить и выкинуть. Так же нам потребуется микроконтроллер, мой выбор пал на ATmega16 – у него достаточно портов для подключения датчиков и периферии и вообще он довольно удобный. Ещё тебе потребуется закупить немного радиодеталей, паяльник, мультиметр.
Делаем плату с МК
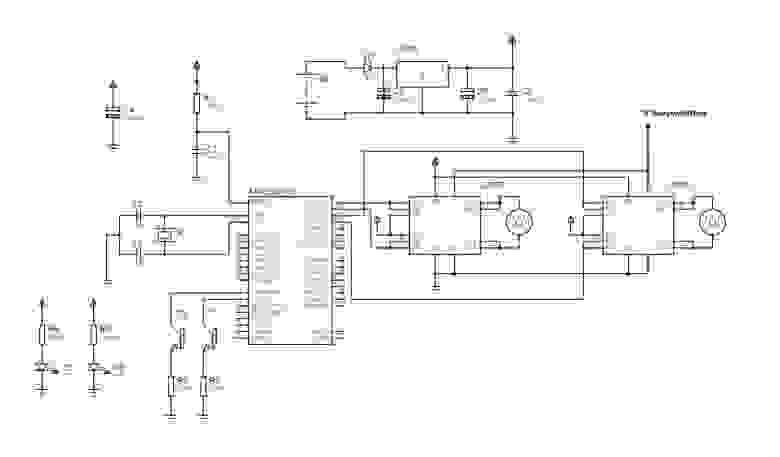
Схема робота
В нашем случае микроконтроллер будет выполнять функции мозга, но начнём мы не с него, а с питания мозга робота. Правильное питание – залог здоровья, поэтому мы начнём с того, как правильно кормить нашего робота, потому что на этом обычно ошибаются начинающие роботостроители. А для того, чтобы наш робот работал нормально нужно использовать стабилизатор напряжения. Я предпочитаю микросхему L7805 – она предназначена, чтобы на выходе выдавать стабильное напряжение 5В, которое и нужно нашему микроконтроллеру. Но из-за того, что падение напряжения на этой микросхеме составляет порядка 2,5В к нему нужно подавать минимум 7,5В. Вместе с этим стабилизатором используются электролитические конденсаторы, чтобы сгладить пульсации напряжения и в цепь обязательно включают диод, для защиты от переполюсовки.
Теперь мы можем заняться нашим микроконтроллером. Корпус у МК — DIP (так удобнее паять) и имеет сорок выводов. На борту имеется АЦП, ШИМ, USART и много другого, что мы пока использовать не будем. Рассмотрим несколько важных узлов. Вывод RESET (9-ая нога МК) подтянут резистором R1 к «плюсу» источника питания – это нужно делать обязательно! Иначе твой МК может непреднамеренно сбрасываться или, проще говоря – глючить. Так же желательной мерой, но не обязательной является подключение RESET’а через керамический конденсатор C1 к «земле». На схеме ты так же можешь увидеть электролит на 1000 мкФ, он спасает от провалов напряжения при работе двигателей, что тоже благоприятно скажется на работе микроконтроллера. Кварцевый резонатор X1 и конденсаторы C2, C3 нужно располагать как можно ближе к выводам XTAL1 и XTAL2.
О том, как прошивать МК, я рассказывать не буду, так как об этом можно прочитать в интернете. Писать программу мы будем на Cи, в качестве среды программирования я выбрал CodeVisionAVR. Это довольно удобная среда и полезна новичкам, потому что имеет встроенный мастер создания кода.

Плата моего робота
Управление двигателями
Не менее важным компонентом в нашем роботе является драйвер двигателей, который облегчает нам задачу в управлении им. Никогда и ни в коем случае нельзя подключать двигатели напрямую к МК! Вообще мощными нагрузками нельзя управлять с микроконтроллера напрямую, иначе он сгорит. Пользуйтесь ключевыми транзисторами. Для нашего случая есть специальная микросхема – L293D. В подобных несложных проектах всегда старайтесь использовать именно эту микросхему с индексом «D», так как она имеет встроенные диоды для защиты от перегрузок. Этой микросхемой очень легко управлять и её просто достать в радиотехнических магазинах. Она выпускается в двух корпусах DIP и SOIC. Мы будем использовать в корпусе DIP из-за удобства монтажа на плате. L293D имеет раздельное питание двигателей и логики. Поэтому саму микросхему мы будем питать от стабилизатора (вход VSS), а двигатели напрямую от аккумуляторов (вход VS). L293D выдерживает нагрузку 600 мА на каждый канал, а этих каналов у неё два, то есть к одной микросхеме можно подключить два двигателя. Но, чтобы перестраховаться, мы объединим каналы, и тогда потребуется по одной микре на каждый двигатель. Отсюда следует, что L293D сможет выдержать 1.2 А. Чтобы этого добиться нужно объединить ноги микры, как показано на схеме. Микросхема работает следующим образом: когда на IN1 и IN2 подаётся логический «0», а на IN3 и IN4 логическая единица, то двигатель вращается в одну сторону, а если инвертировать сигналы – подать логический ноль, тогда двигатель начнёт вращаться в другую сторону. Выводы EN1 и EN2 отвечают за включение каждого канала. Их мы соединяем и подключаем к «плюсу» питания от стабилизатора. Так как микросхема греется во время работы, а установка радиаторов проблематична на этот тип корпуса, то отвод тепла обеспечивается ногами GND — их лучше распаивать на широкой контактной площадке. Вот и всё, что на первое время тебе нужно знать о драйверах двигателей.
Датчики препятствий
Чтобы наш робот мог ориентироваться и не врезался во всё, мы установим на него два инфракрасных датчика. Самый простейший датчик состоит из ик-диода, который излучает в инфракрасном спектре и фототранзистор, который будет принимать сигнал с ик-диода. Принцип такой: когда перед датчиком нет преграды, то ик-лучи не попадают на фототранзистор и он не открывается. Если перед датчиком препятствие, тогда лучи от него отражаются и попадают на транзистор – он открывается и начинает течь ток. Недостаток таких датчиков в том, что они могут по-разному реагировать на различные поверхности и не защищены от помех — от посторонних сигналов других устройств датчик, случайно, может сработать. От помех может защитить модулирование сигнала, но пока мы этим заморачиватся не будем. Для начала, и этого хватит.
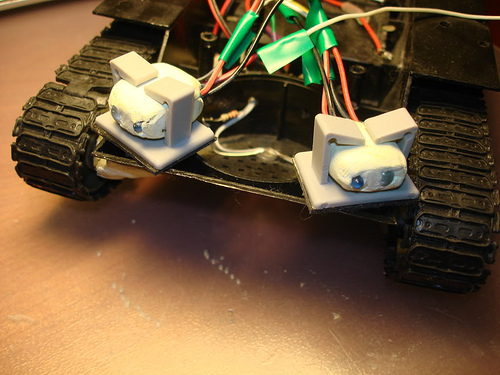
Первый вариант датчиков моего робота
Прошивка робота
Чтобы оживить робота, для него нужно написать прошивку, то есть программу, которая бы снимала показания с датчиков и управляла двигателями. Моя программа наиболее проста, она не содержит сложных конструкций и всем будет понятна. Следующие две строки подключают заголовочные файлы для нашего микроконтроллера и команды для формирования задержек:
Следующие строки условные, потому что значения PORTC зависят от того, как ты подключил драйвер двигателей к своему микроконтроллеру:
PORTC.0 = 1;
PORTC.1 = 0;
PORTC.2 = 1;
PORTC.3 = 0;
Значение 0xFF означает, что на выходе будет лог. «1», а 0x00 – лог. «0».
Следующей конструкцией мы проверяем, есть ли перед роботом препятствие и с какой оно стороны:
Если на фототранзистор попадает свет от ик-диода, то на ноге микроконтроллера устанавливается лог. «0» и робот начинает движение назад, чтобы отъехать от препятствия, потом разворачивается, чтобы снова не столкнуться с преградой и затем опять едет вперёд. Так как у нас два датчика, то мы проверяем наличие преграды два раза – справа и слева и потому можем узнать с какой стороны препятствие. Команда «delay_ms(1000)» указывает на то, что пройдёт одна секунда, прежде чем начнёт выполняться следующая команда.
Заключение
Я рассмотрел большинство аспектов, которые помогут тебе собрать твоего первого робота. Но на этом робототехника не заканчивается. Если ты соберёшь этого робота, то у тебя появится куча возможностей для его расширения. Можно усовершенствовать алгоритм робота, как например, что делать, если препятствие не с какой-то стороны, а прямо перед роботом. Так же не помешает установить энкодер – простое устройство, которое поможет точно располагать и знать расположение твоего робота в пространстве. Для наглядности возможна установка цветного или монохромного дисплея, который может показывать полезную информацию – уровень заряда аккумулятора, расстояние до препятствия, различную отладочную информацию. Не помешает и усовершенствование датчиков – установка TSOP (это ик-приёмники, которые воспринимают сигнал только определённой частоты) вместо обычных фототранзисторов. Помимо инфракрасных датчиков существуют ультразвуковые, стоят подороже, и тоже не лишены недостатков, но в последнее время набирают популярность у роботостроителей. Для того, чтобы робот мог реагировать на звук, было бы неплохо установить микрофоны с усилителем. Но по-настоящему интересным, я считаю, установка камеры и программирование на её основе машинного зрения. Есть набор специальных библиотек OpenCV, с помощью которых можно запрограммировать распознавание лиц, движения по цветным маякам и много всего интересного. Всё зависит только от твоей фантазии и умений.
Список компонентов:
Код прошивки:
Тип МК : ATmega16
Тактовая частота : 16,000000 MHz
Если у тебя частота кварца другая, то это нужно указать в настройках среды:
Project -> Configure -> Закладка «C Compiler»
*****************************************************/
void main(void)
<
//Настраиваем порты на вход
//Через эти порты мы получаем сигналы от датчиков
DDRB=0x00;
//Включаем подтягивающие резисторы
PORTB=0xFF;
//Настраиваем порты на выход
//Через эти порты мы управляем двигателями
DDRC=0xFF;
//Главный цикл программы. Здесь мы считываем значения с датчиков
//и управляем двигателями
while (1)
<
//Едем вперёд
PORTC.0 = 1;
PORTC.1 = 0;
PORTC.2 = 1;
PORTC.3 = 0;
if (!(PINB & (1
О моём роботе
В данный момент мой робот практически завершён. 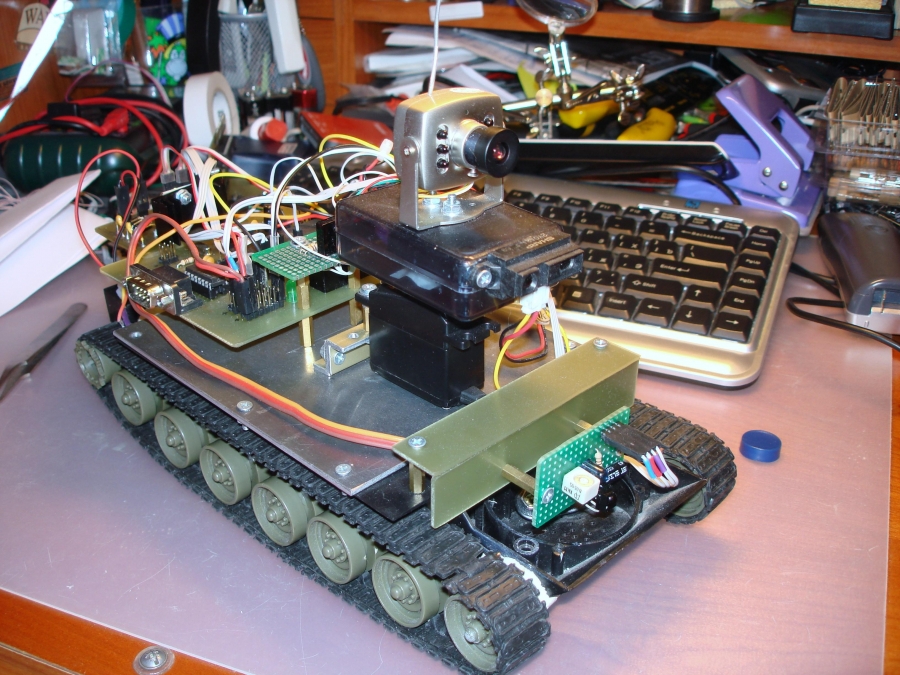
На нём установлена беспроводная камера, датчик расстояния (и камера и этот датчик установлены на поворотной башне), датчик препятствия, энкодер, приёмник сигналов с пульта и интерфейс RS-232 для соединения с компьютером. Работает в двух режимах: автономном и ручном (принимает сигналы управления с пульта ДУ), камера также может включаться/выключаться дистанционно или самим роботом для экономии заряда батарей. Пишу прошивку для охраны квартиры (передача изображения на компьютер, обнаружение движений, объезд помещения).
По пожеланиям выкладываю видео:
UPD. Перезалил фотографии и сделал небольшие поправки в тексте.
Статья была опубликована мною в журнале «Хакер» за август 2009 года.
Источник