—> —>Главная » 2013 » Июль » 19 » Z-RoboDog — собака-робот своими руками.
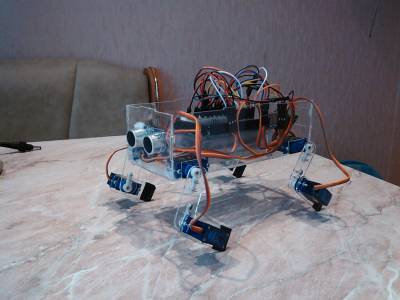
Хочу показать и рассказать о своем первом самодельном роботе Z-RoboDog. Также поделится всеми материалами, чертежами и файлами, используя которые вы сами сможете собрать такую собачку. Данный робот может ходить вперед, и останавливаться перед препятствиями. Возможно в будущем добавлю дополнительные сервоприводы и ступни. Ну, а сейчас выкладываю всё, что сделано в данной версии.
Z-RoboDog — это мой первый эксперимент по созданию роботов. Всё придумывал и делал самостоятельно. В первую очередь проект должен был быть максимально недорогим. Корпус создавал без всяких расчетов и балансировки, основное требование — минимальные габариты. Итак давайте посмотрим как собирается этот робот и что он может.
Что вам понадобиться для сборки Z-RoboDog:
1. Набор деталей корпуса и лап из оргстекла 1.5 мм. 2. Arduino Mega или Uno (используется Mega) — 1 шт. 3. Микро сервопривод (используются TowerPro SG90) — 8 шт. 4. Ультразвуковой дальномер HC-SR04 — 1 шт. 5. Аккумулятор размером 18560, 3.7V (используются TrustFire 2400 mAh) — 2 шт. 6. Держатель батарей размера 18560 (используется переделанный контейнер — упаковка) — 1 шт. 7. Стойка для печатной платы 25 мм. (используется вот такие стойки) — 4 шт. 8. Часть макетной платы. 9. Провода-перемычки. 10. Винт DIN 7985 M2, 8 мм. — 18 шт. 11. Гайка DIN 934 M2 — 18 шт. 12. Шуруповерт или дрель.
Сборка робота Z-RoboDog:
1. Корпус робота изготовлен из прозрачного оргстекла толщиной 1.5 мм. Все детали вырезаны лазером по чертежу сделанном в программе CorelDraw (скачать файл z-robodog_2_4_7_s.cdr).
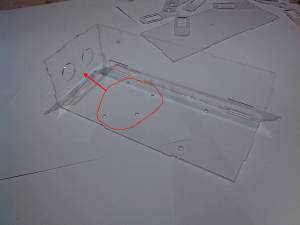
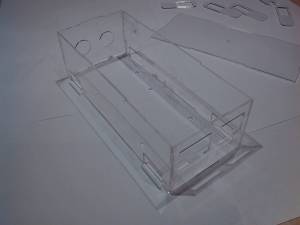
2. Склейте корпус секундным клеем. Прочности склеенного корпуса будет вполне достаточно. При сборке учитывайте положение отверстий на нижней крышке (смотрите на фото), а лучше приложите плату и убедитесь что всё совпадает. Боковые стенки крепите так, чтобы отверстия для проводов находились ближе к задней стенке. Более широкое отверстие на задней стенке предназначено для USB провода, учтите это при сборке.
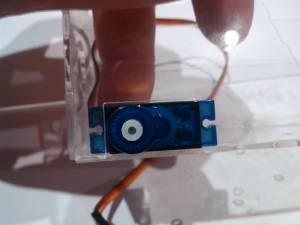
3. Отметьте и просверлите отверстия (сверло 2 мм.). Закрепите сервоприводы в корпусе используя болты и гайки (пункты 10, 11 из списка). Валы передних сервоприводов должны быть ближе к передней стенке. Валы задних сервоприводов ближе к задней стенке.
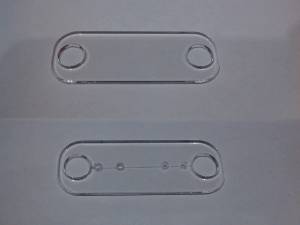
4.1. Соберите лапы. Возьмите верхние части лап (с двумя отверстиями). Разметьте середину детали. Подставив качалку сервоприводов отметьте места крепления шурупами и просверлите отверстия (сверло 1.5 мм). Закрепите качалки так, чтобы шляпки шурупов были со стороны посадочных мест. Качалки закрепите с разных сторон и посадочные места для валов до были в противоположном направлении.
4.2. Отметьте и просверлите отверстия для крепления сервоприводов (сверло 2 мм). Валы закрепленных сервоприводов должны находиться ближе к узкому краю лапы.
4.3. Чтобы лапы не проскальзывали наклейте на них например резину. Но переднюю часть лапы заклеивать не стоит, при шагах собачка может зацепляться и застревать. Я наклеил полосочки липучего коврика из машины.
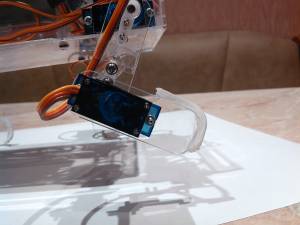
5. Отметьте и просверлите отверстия для крепления ультразвукового дальномера (сверло 2 мм). Установите дальномер, ножки контактов должны быть направлены вверх.
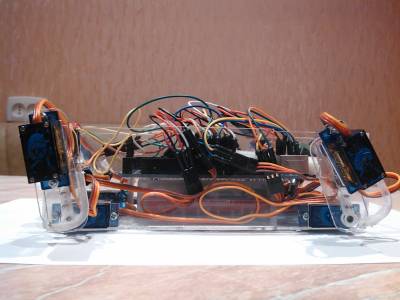
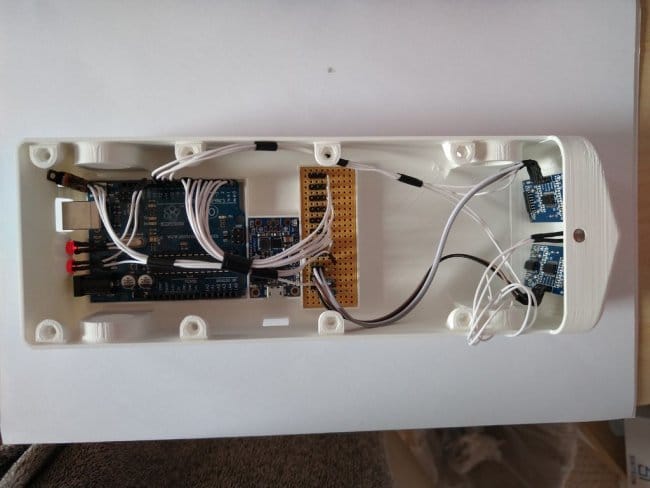
6. Установите держатель батарей так, чтобы в корпусе он располагался по середине. Закрепите плату Arduino и подключите все компоненты. Для разветвления питания использовалась часть макетной платы.
Настройка и запуск робота Z-RoboDog:
На этом этапе вам придется самостоятельно установить лапы, чтобы можно было откалибровать шаги. Основная проблема в качалках, которые крепятся на валы только в определенных положениях. А также сами сервоприводы могут отличаться рабочими градусами.
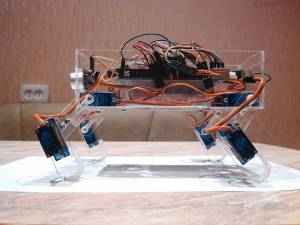
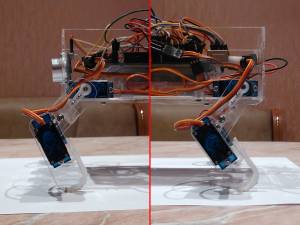
Вот как у моей собачки выглядят лапы в крайних точках углов сервопривода (переменные zs1, zs2, zs3 и т.д). Постарайтесь лапы выставить как на фото. Визуально лапы должны быть в одинаковых положениях.
В основной стойке вы так же сможете выставить лапы. После чего не забудьте прикрутить качалки к валам сервоприводов.
Программная часть Z-RoboDog:
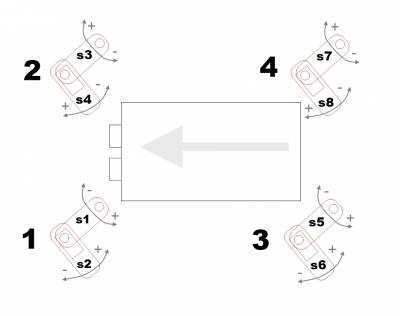
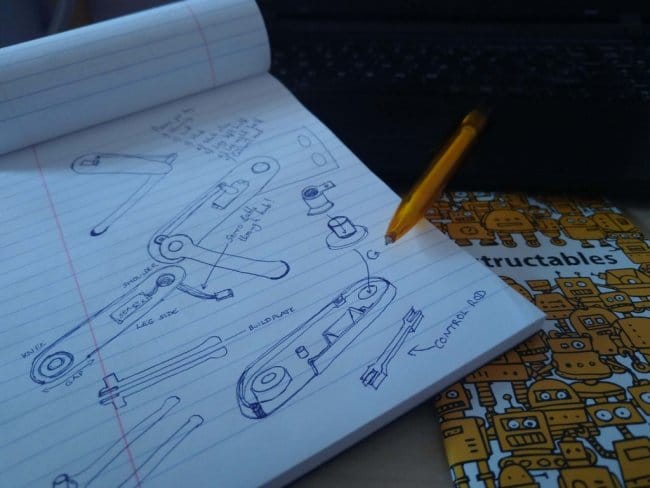
Код очень простой, везде добавлены комментарии. Все движения находятся в массиве, чтобы не запутаться в цифрах я использовал переменные для каждого сервопривода. Например, s1 — сервопривод 1, s2 — сервопривод 2 и так далее. Для упрощения понимания предлагая вам вот такую схему.
На схеме пронумерованы лапы, каждая часть лапы ассоциируется с сервоприводом который её двигает. Также для каждой лапы указаны направления движения, знаки плюс и минус указывают куда будет двигаться лапа при увеличении или уменьшении угла. Исходными углами выбраны углы основной стойки (s1, s2, s3 и т.д.). Например если вам нужно вытянуть 2-ю лапу вы должны увеличить угол s3 и s4, в массиве это будет выглядеть так s3+100,s4+50, s5,s6, s7,s8>. Вот полный скетч. Код писался в силу моих познаний, сообщите если я выбрал не правильный путь реализации. Посмотреть код можно тут Z_RoboDog_v2_4_07_Stabil.ino.txt
Видео проекта Z-RoboDog:
Все видео можно посмотреть тут: плейлист Z-RoboDog
Источник
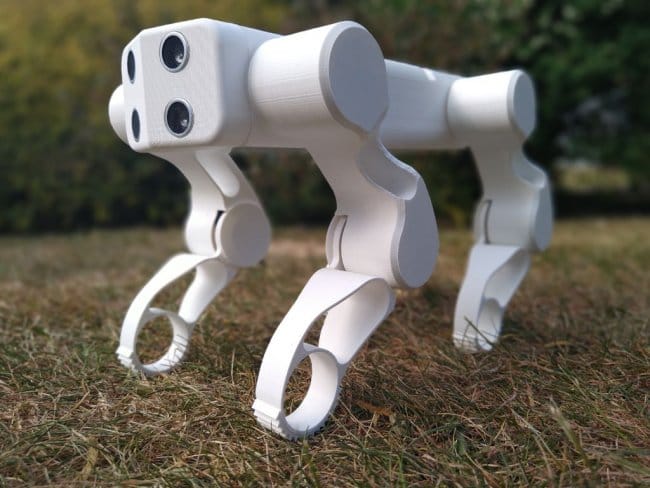
Собака — робот, умеющая выполнять некоторые команды
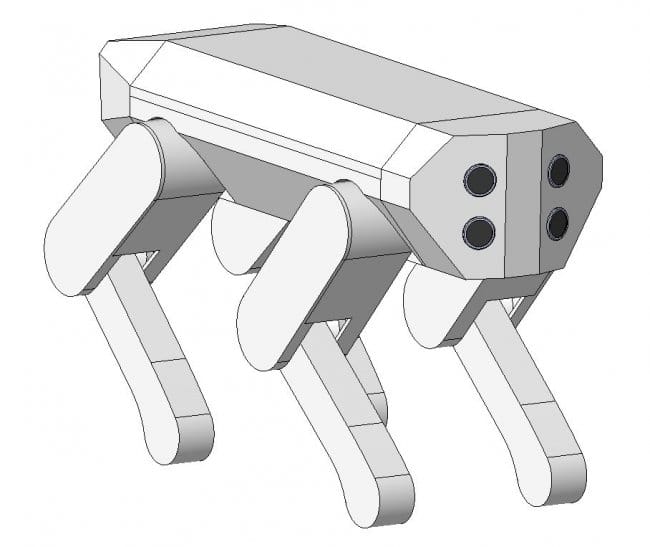
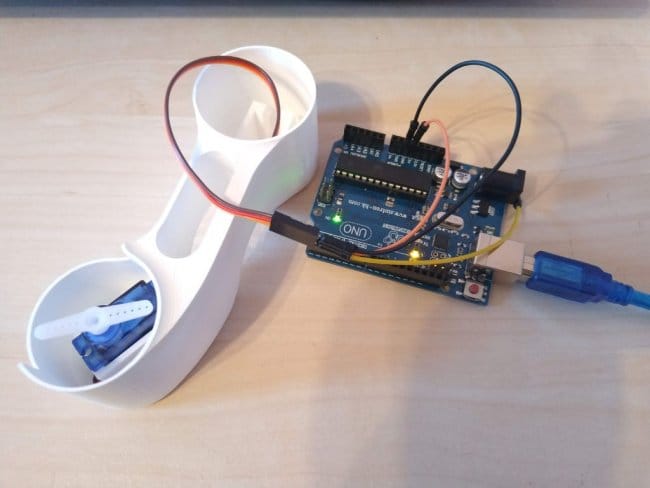
Из этой статьи мы с вами узнаем, как сделать маленького четвероногого робособаку используя 3D-печатные детали. Он спроектирован компактным, простым и недорогим в сборке. В проекте использует Arduino Uno в качестве микроконтроллера. К этой статье мастер прилагает 3D-модели, программы Arduino и инструкции, необходимые для того, чтобы повторить этот проект для себя.
Давайте посмотрим небольшое видео.
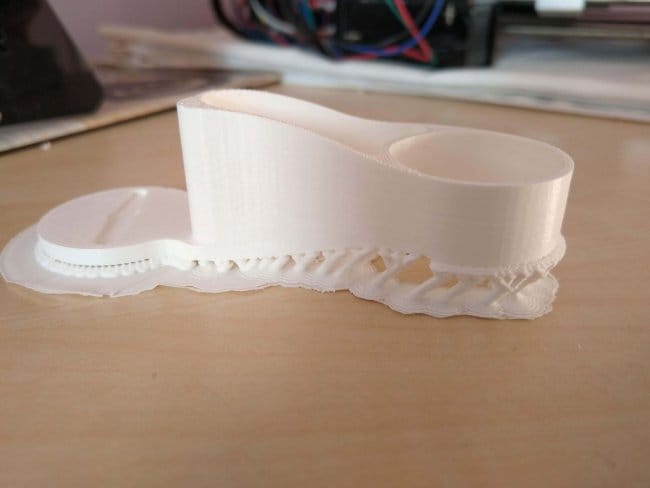
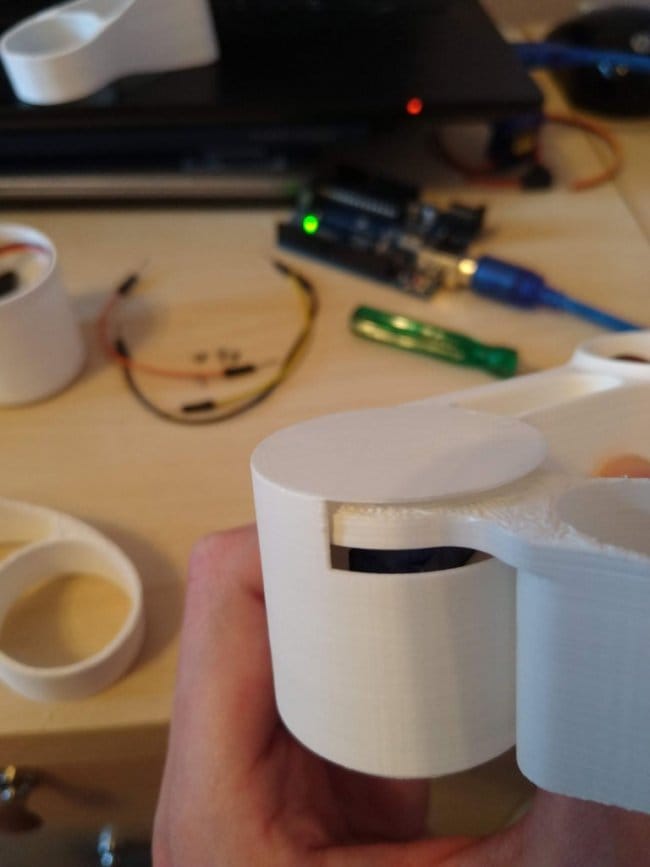
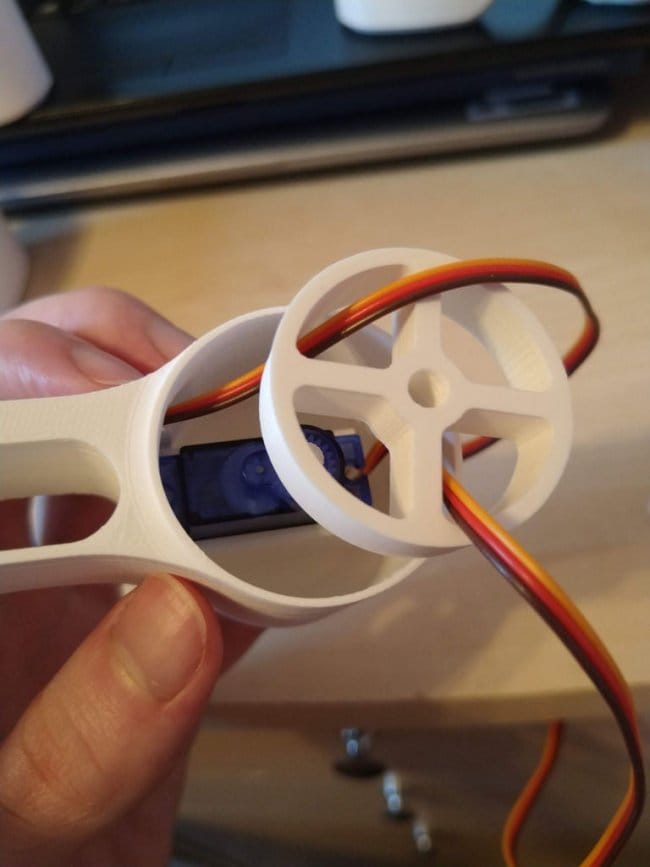
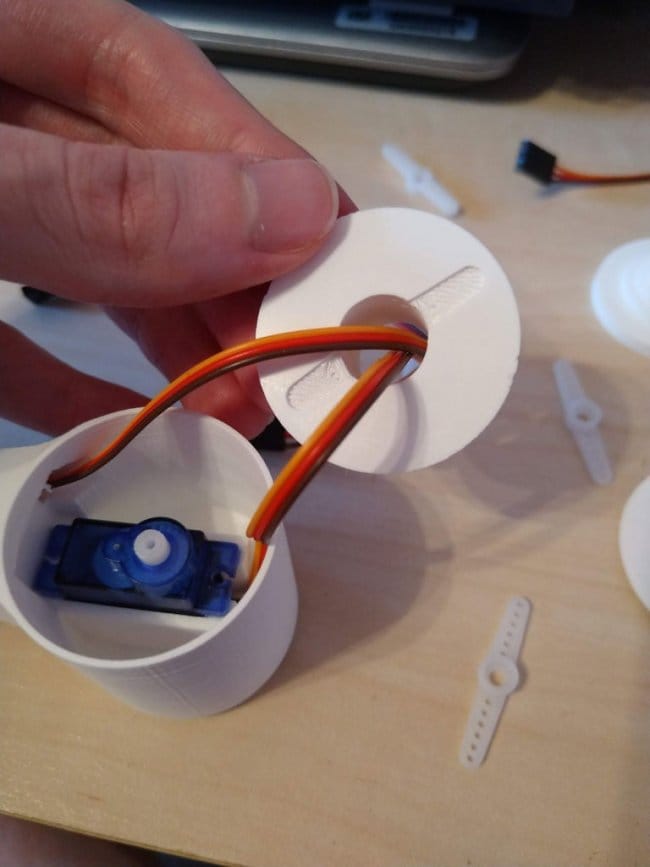
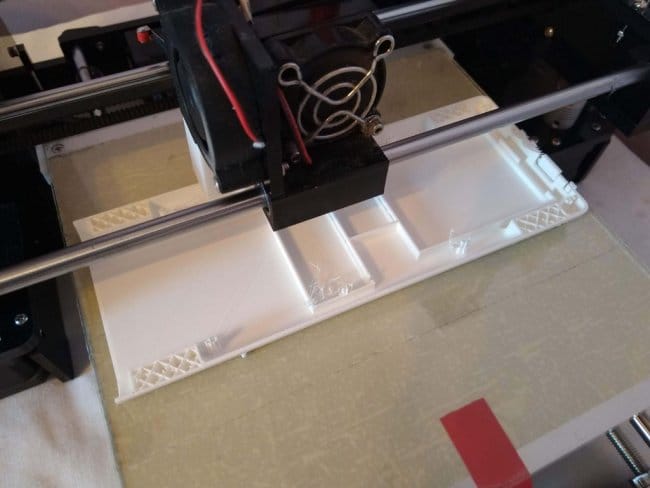
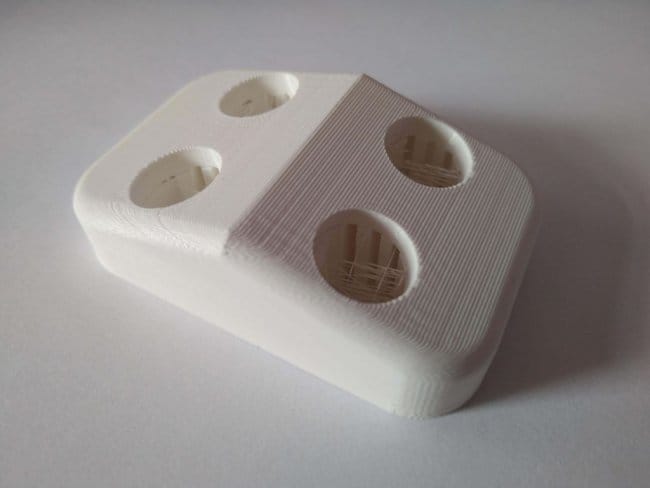
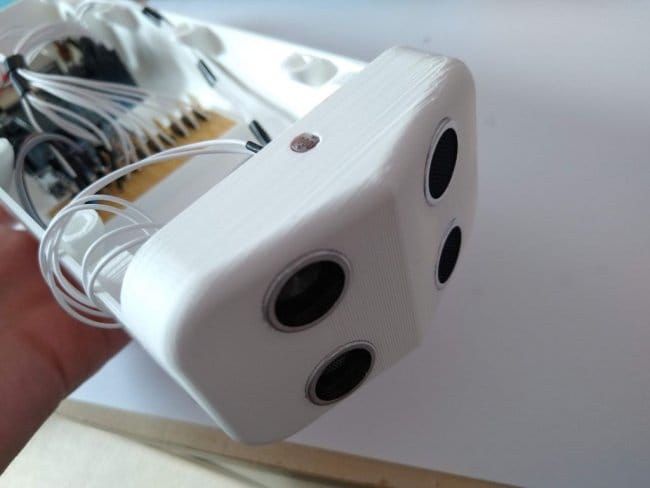
Шаг первый: дизайн, файлы для печати Есть несколько технологий, которые нужно будет использовать, чтобы сделать этого робота. Встроенные электрические кабели. В каждой ноге робота используют два серводвигателя, один в колене и один в бедре. Мастер хотел скрыть всю электрическую проводку, поэтому в части «бедро» он решил попробовать установить серво кабель внутрь детали. Внутри детали скрыт небольшой канал, достаточно большой для кабеля. В соответствующий момент печати мастер приостановил работу принтера, проложил кабель через канал и возобновил печать. Еще через несколько минут канал был закрыт, а серво кабель скрыт внутри детали.
Поддержка для сложных деталей в Meshmixer. Это часть программного обеспечения, может быть очень полезна для создания опор для деталей со сложной формой.
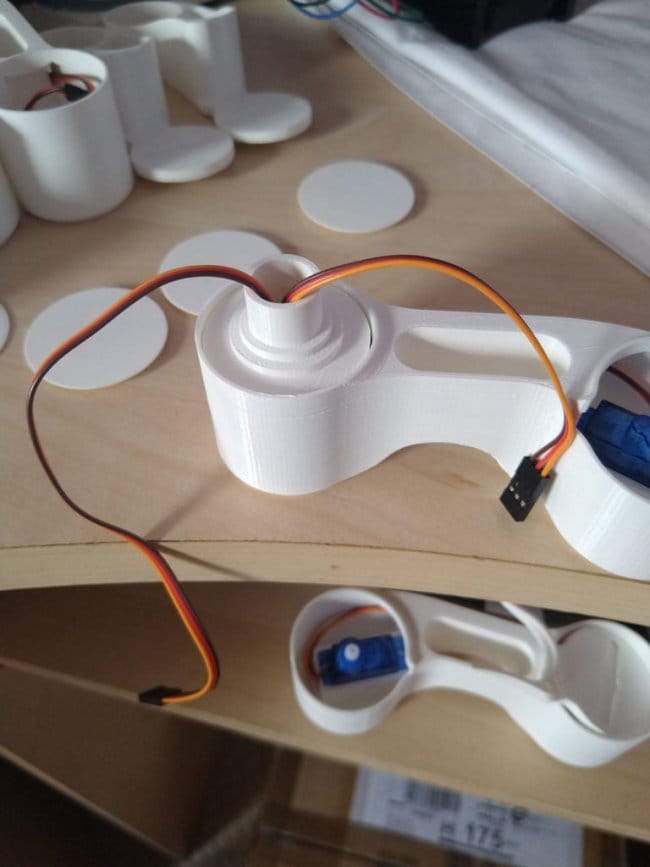
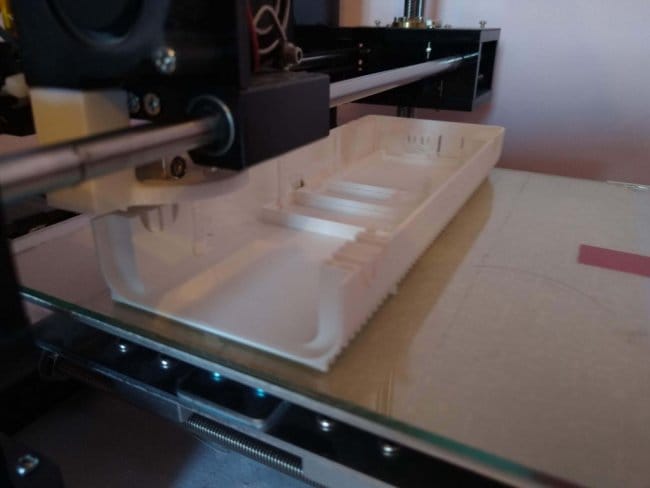
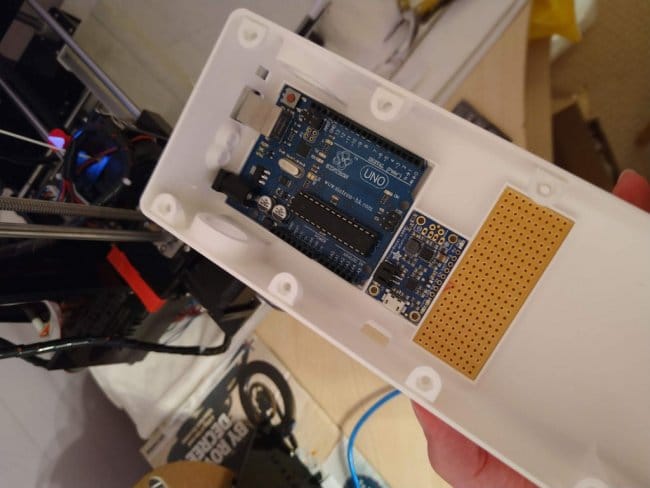
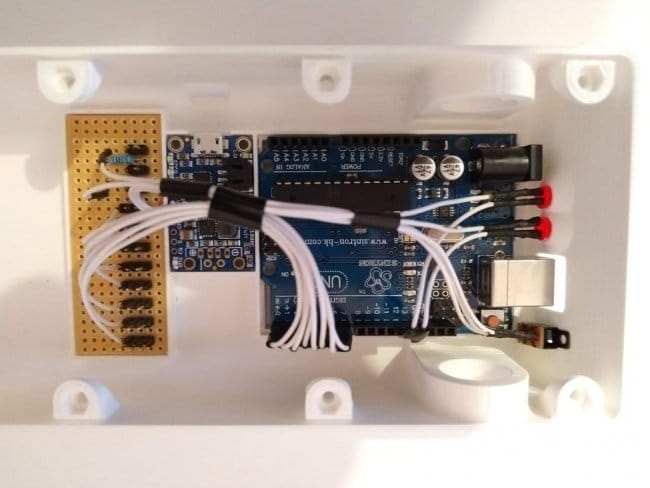
Детали с фрикционным креплением. Некоторые детали в этой сборке не склеены, а просто рассчитаны на плотное соединение между печатными деталями. Мастер будет использовать эту технику для надежной и безопасной установки электроники в корпусе, а также для возможности их снятия при необходимости.
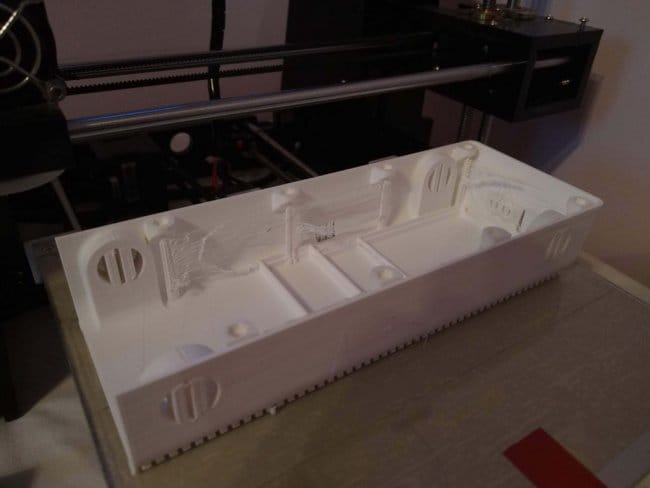
Шестигранные гайки Крышка корпуса закрывает весь отсек электроники и удерживается с помощью 8 болтов M2,5. Гайки для них вставляются в шестиугольные полости в корпусе и удерживаются на месте с помощью суперклея.
Файлы для печати мастер расположил по этому адресу . Файлы находятся в формате .step, а не .stl. Мастер сделал это на той случай, если пользователям придётся менять файл в соответствии с особенностями своего 3D-принтера (.stl не редактируются).
Шаг второй: печать Meshmixer. Первые два изображения показывают опоры, которые мастер использовал при печати частей «бедра» и «колена». Третье изображение показывает настройки Overhang, которые я использовал в Meshmixer для создания этих опор. Настройки разные и мастер приложил фотографии.
Когда вы откроете программу Meshmixer, нажмите Import и выберите файл .stl нужной вам части. Затем выберите Edit на панели задач слева и Transform. Измените ориентацию вашего файла на нужную, и нажмите Accept. Затем выберите «Align» и «Accept». Теперь выберите Analysis на панели задач и Overhangs. Измените настройки как на фото. Нажмите Generate Support, затем Done. Теперь все, что вам нужно сделать, это Файл — Экспорт, и выбрать, где сохранить ваш новый файл .stl.
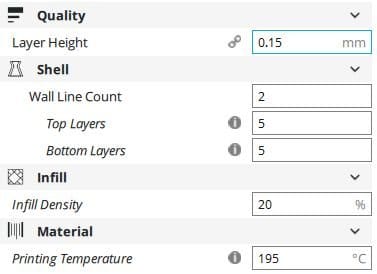
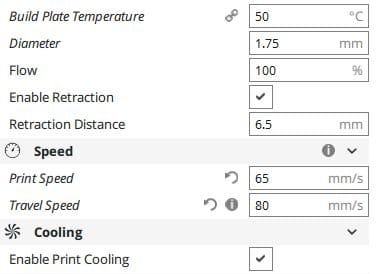
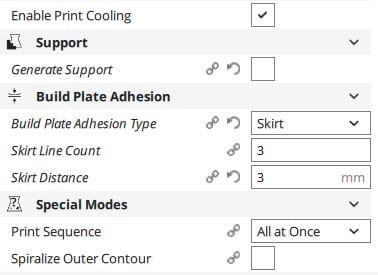
Cura. Мастер использует программу Cura для создания своих файлов печати. Он добавил несколько скриншотов настроек печати, которые я использовал для всех деталей. Чтобы добиться максимум качества, он печатал очень медленно.
Для таких деталей, как суставы ног, я напечатал несколько их вариантов, немного меняя зазор между сопрягаемыми деталями. Нужно было добиться плотной посадки и свободного хода сочлененных деталей.
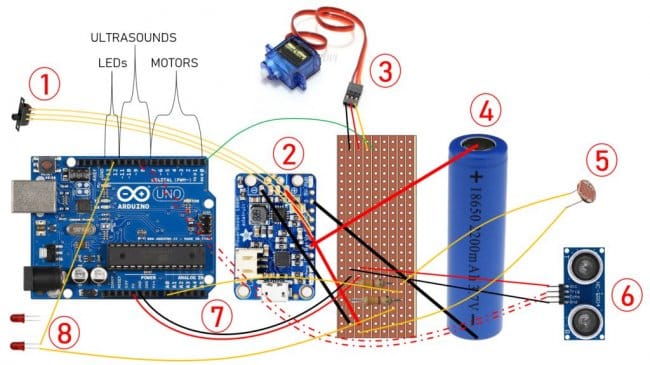
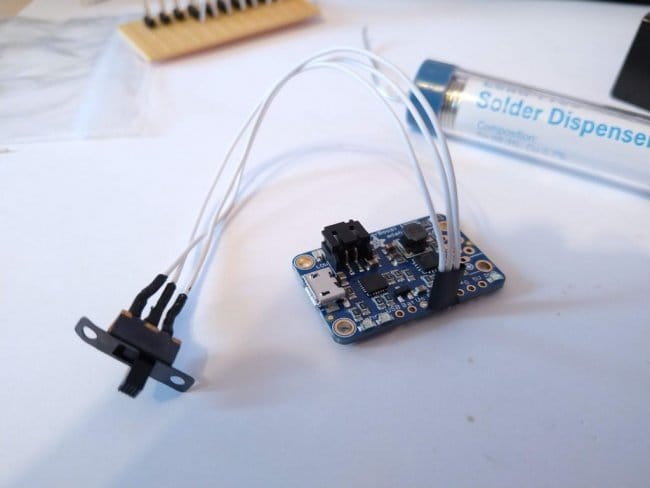
Шаг четвертый: электрическая схема 1.Ползунковый переключатель SPDT подключается к контактам VS, EN и GND Powerboost. 2.Как подключить Powerboost 1000C можно ознакомится по этой ссылке.
3.Серводвигатель на схеме показан только один, но все они подключаются аналогично. Один провод +5В, один минус, и один сигнальный.
4.Батарея 18560 — подключена к Powerboost 1000C, как показано на эскизе.
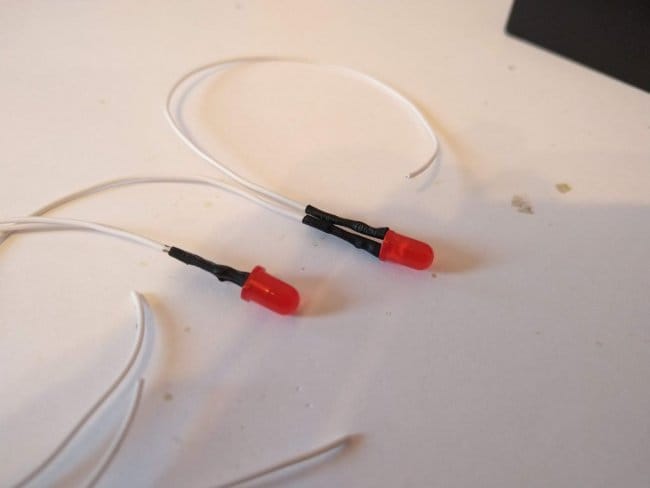
5.Фоторезистор подключается через резистор 10 кОм на шину заземления. Этот провод идет к одному из аналоговых портов на Arduino. Другой провод LDR подключается к шине + 5V на плате.
6.HC-SR04 Ультразвуковых датчиков два, но на семе присутствует один. Этот тип датчика имеет 4 контакта. Контакты Vcc и Gnd датчика подключаются к + 5 В и заземляющим шинам платы. Контакты Trig и Echo подключаются к двум контактам Arduino Digital I / O, как показано на рисунке. Такое же расположение используется и для второго датчика.
7.Питание Arduino. Arduino получает питание 5В.
8.Питание светодиодов идет от цифрового вывода Ардуно. Вторая ножка подключается к заземляющему проводу. Мастер запитал Arduino таким образом, потому что Powerboost 1000C выдает 5 В, и у него не было подходящей альтернативы. Использование контакта 5 В таким способом — единственный способ запустить Arduino на 5 В без использования порта USB. USB-разъем мастер оставил для загрузки кода.
Arduino не должен питаться одновременно от Powerboost 1000C и быть подключен к компьютеру. Перед подключением Arduino к компьютеру для загрузки программы убедитесь, что Powerboost 1000C выключен, и для дополнительной защиты лучше всего отсоединить кабели, идущие к контактам 5V и Ground Arduino.
Шаг шестой: код Написание кода было непростой задачей. Мастер установил изделие на коробку и меняя настройки кода добивался нужных движений. Для имитации собачей походки мастер просмотрел несколько видео в замедленном воспроизведении.
Собака при ходьбе всегда имеет 3 точки контакта с землей, при этом одна лапа отрывается от земли одновременно с другой лапой, опускающейся на землю. Более быстрый темп поднимает две лапы от земли сразу. Мастер запрограммировал 5 подпрограмм движения. В коде используются несколько функций, например, «трюк с лапой» и «шаг вперед». Ультразвуковые датчики постоянно сканируют окружающее пространство и останавливают собаку при препятствии.
В будущем мастер планирует установить оба датчика под углом 15 градусов к центру, чтобы собака могла решить, в какую сторону повернуть, если обнаружит препятствие.
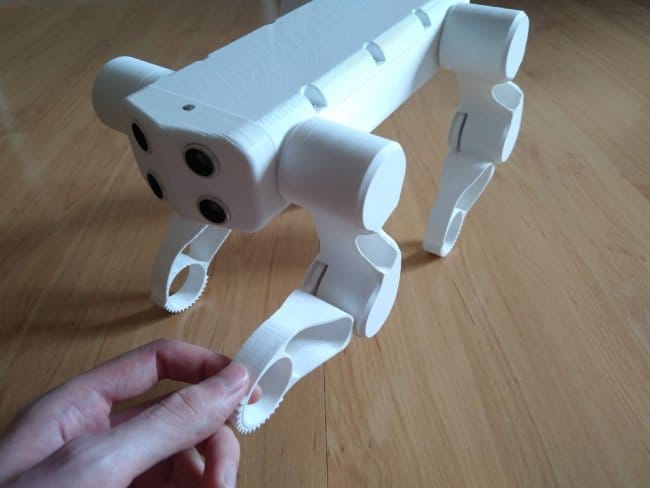
Фоторезистор на голове собаки — это простой способ взаимодействия с человеком. Если закрыть фоторезистор в течении 3 секунд, то пес подаст лапу.
Шаг седьмой: развитие проекта После изготовления робота мастер решил сделать второго учтя недостатки. Серводвигатели, которые мастер использует в этом проекте, низкого качества — имитация сервоприводов TowerPro SG90 с пластиковыми шестернями. Такие двигатели имеют большой люфт. Мастер будет устанавливать серводвигатели более высокого качества с металлическими деталями
На ноги планируется установить резиновые протекторы.
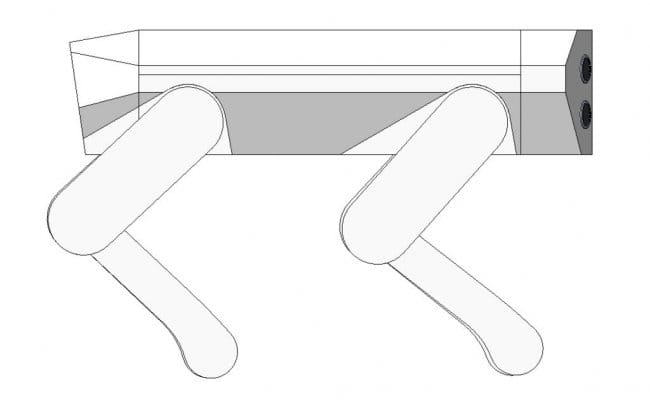
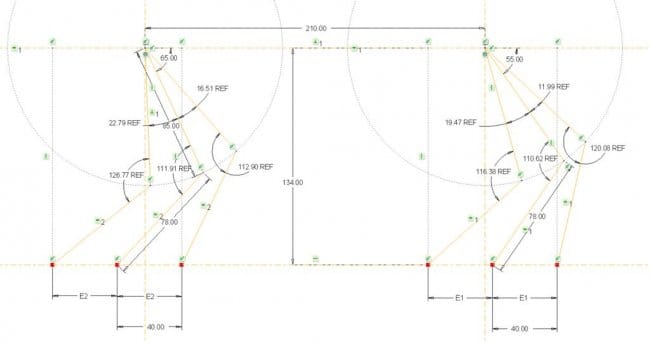
Ширина между ступнями в первоначальном дизайне минимальна. Для улучшения баланса нужно немного увеличить расстояние между ногами, например, изменив наружные части. Кроме того, ножки в настоящее время имеют ширину 15 мм (около 0,6 дюйма) каждая, но если они будут около 25 мм, то устройство будет более устойчива.
-Выбор этой силовой Powerboost 1000C платы в роботе был основан на том, что было в наличии. Максимальный ток, который он может обеспечить при 5 В, составляет около 2 А. Один 9-граммовый сервопривод может потреблять до 0,5 А или даже больше при максимальном крутящем моменте, поэтому очевидно, что 2 А недостаточно для работы всех двигателей на полной мощности. В будущем мастер планирует подобрать и установить другой модуль.
Люфт или «провисание» — это потерянное движение в механизме, вызванное зазорами и чрезмерно большими механическими допусками. Мастер собирается уменьшить зазоры.