Делаем робота AIBO своими руками
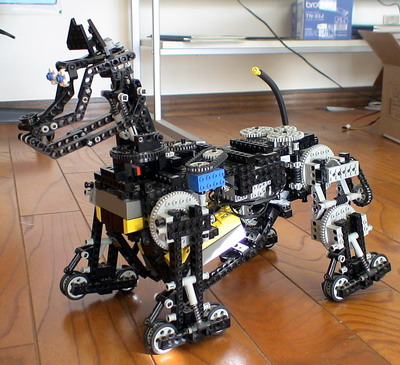 |
Джин Сато (Jin Sato), довольно известный изобретатель в обществе инженеров-роботостроителей, имеющий статус конструктора роботов мирового класса, после продолжительного периода работ, наконец, удостоился возможности представить широкому кругу заинтересованных читателей одну из своих разработок – собаку-робота MIBO. Нужно сказать, что это не первый проект исследователя. На счету Джина уже более 10 гуманоидов, которые он создавал на протяжении 6 лет, т.е. по 2 робота за год. В большинстве случаев ему приходилось самому проходить все этапы разработки роботов — от проектирования чертежей и конструкций, до написания системного программного обеспечения.
По словам автора, он давно мечтал приобрести собаку-робота AIBO от Sony, однако довольно высокая цена устройства никак не позволяла ему этого сделать. Тогда Джин-сан (так называют его друзья) решил создать свою собственную роботизированную собаку из подручных материалов и средств. В данном случае инженер использовал детали детского конструктора LEGO. Оснащенный только пятью двигателями, робот имеет 6 степеней свободы. Он умеет ходить, вилять хвостом, вставать на задние лапы и ложиться на живот. Не знаю, оценят ли скептики по достоинству дизайн устройства, но воплотить в жизнь концепт AIBO автору удалось, хотя и обошелся MIBO Джину на порядок дороже.
Источник
Как сделать робота своими руками: схемы, проекты и подробная инструкция как создать робота (115 фото и видео)
Сегодня в списке детских предпочтений плюшевый медведей и зайцев потеснил новый персонаж – робот. Магазинные полки ломятся от огромного количества разных моделей киборгов, андроидов, трансформеров.

Однако стоят «умные машины» весьма прилично. Поэтому всё больше родителей предпочитают сделать робота из подручных средств своими руками.

Краткое содержимое обзора:
Нюансы создания роботов
Из чего можно сделать робота своими руками? Это зависит от того, кто будет этим заниматься.

Если ребёнок, то его родителям следует предложить ему внимательно просмотреть модели из ненужных коробок, картона, бумаги, спичечных коробков, сигаретных пачек, пластиковых бутылок, съедобной мастики, чтобы выбрать подходящий вариант.

Маме легче создать для ребёнка вязаного или съедобного киборга. А если созданием робота планирует заняться папа, то чадо может рассчитывать на более сложную конструкцию, например, получить высокотехничного андроида.

Бумажный робот
Подготовьте:
- бумагу формата А4;
- ножницы;
- клей.
Также вам потребуется цветной принтер. Создание подобной поделки учит ребёнка быть терпеливым, усидчивым и аккуратным. Ничего сложно в процессе изготовления здесь нет.

Разберём инструкцию, как сделать робота из бумаги своими руками:
- Распечатать цветной шаблон робота. Схему можно отыскать в Интернете.
- Аккуратно вырезать по контуру составные элементы и согнуть их по обозначенным линиям.
- Собрать фигурку. Для этого нужно промазать припуски на каждой заготовке клеем. Склеивать детали желательно начать с головы. Затем ноги, руки, тело. Все углы должны быть прямыми. Припуски нужно спрятать внутрь.
- Добавить декора. Это могут быть вставки из фольги или цветного картона, пластиковые элементы

Вязаный робот Биби
Это ещё один ответ на вопрос, как легко сделать робота своими руками. Такая поделка обязательно понравится вашему ребёнку, ведь это герой известного среди детей мультсериала «Смешарики».

Вязание круглой фигурки не представляет собой ничего сложного. Вам потребуется:
- крючок;
- цветная пряжа;
- наполнитель;
- картон;
- немного проволоки.

Подберите в Интернете понравившуюся схему и приступайте к вязанию. В антенну вставьте проволоку. Так её станет можно загибать.

Картон понадобится при изготовлении ножек. В конце работы не забудьте аккуратно отрезать нитки и заправить их внутрь.
Робот из спичечных коробков
Такая самоделка до неприличия проста в изготовлении, но очень симпатична. Она создаётся из девяти коробков, цветной бумаги и клея.

Коробки нужно обклеить цветной бумагой и сформировать из них фигурку робота. Не забудьте прорисовать лицо фломастером, и прикрепить антенны из спичек.

Мобильный робот
Теперь рассмотрим, как сделать робота в домашних условиях своими руками так, чтобы он отвечал последнему слову техники. Подготовьте:
- провод – 2 шт.;
- моторчик – 1 шт.;
- батарейку AA;
- канцелярские кнопки – 3 шт.;
- пенокартон – 2 куска;
- головные части старых зубных щёток – 3 шт.

Порядок действий:
- Присоедините батарейку к мотору. В качестве промежуточного слоя между ними вставьте кусок пенокартона. Фиксацию проводите при помощи клея.
- Займитесь устройством дестабилизатора. С этой целью наденьте на ось моторчика небольшой кусок пенокартона вытянутой формы и закрепите его на клей. На кончик дестабилизатора приклейте какое-либо украшение. Так вы увеличите амплитуду его движения.
- Снабдите андроида конечностями. Для этого приклейте головки от зубных щёток к нижней стороне моторчика. Роль прослойки отдайте пенокартону.
- Припаяйте отрезки провода к контактам мотора.
- Конец одного из проводов приклейте к одному из концов батарейки.
- Возьмите две бусины и прикрепите их к торцу батарейки. Это будут глаза.
- Запустите робота. Для этого свободный конец провода подсоедините к свободному контакту батарейки и зафиксируйте скотчем. Создание андроида завершено.

Вот мы и рассмотрели самые популярные способы, как сделать робота ребенку своими руками.

Главное, что следует запомнить – в изготовлении подобных поделок нет ничего трудного.
Источник
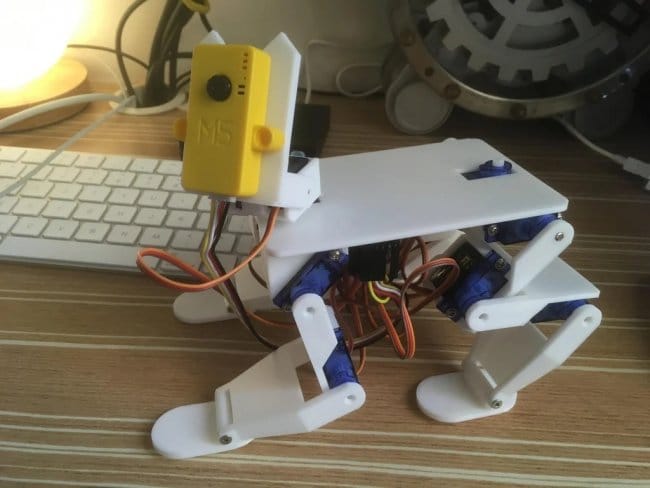
Как сделать робокота


Мастер уже давно увлекается фигурами типа Strandbeest, Trotbot, проект с котом это его новое увлечение.
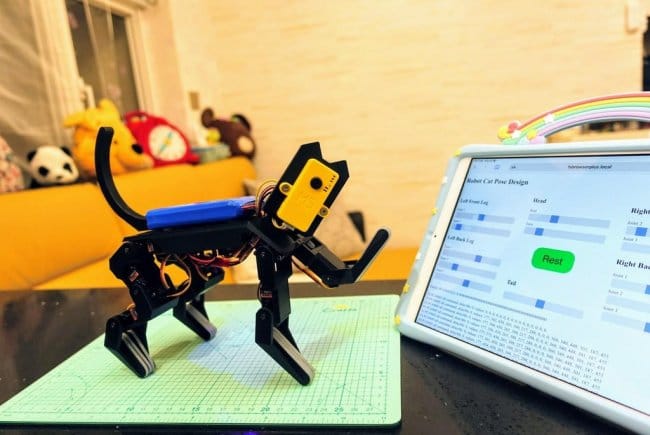
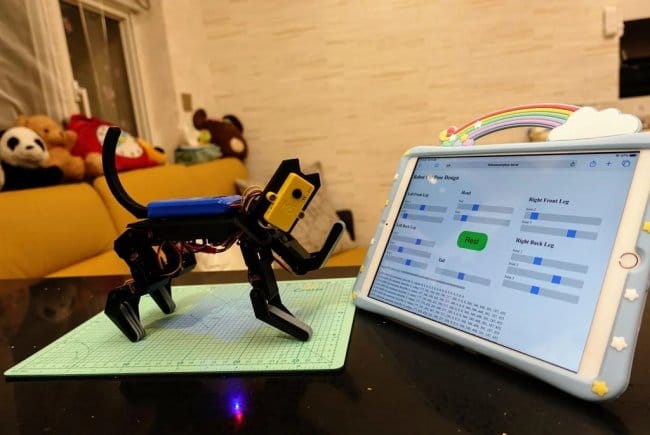
Основная цель проекта — робот должен выглядеть как кошка и вести себя как кошка.
Шаг первый: бионика*
*Бионика — прикладная наука о применении в технических устройствах и системах принципов организации, свойств, функций и структур живой природы, то есть формах живого в природе и их промышленных аналогах.
Чтобы сделать робота, похожего на кошку, нужно сначала изучить кошачий скелет.
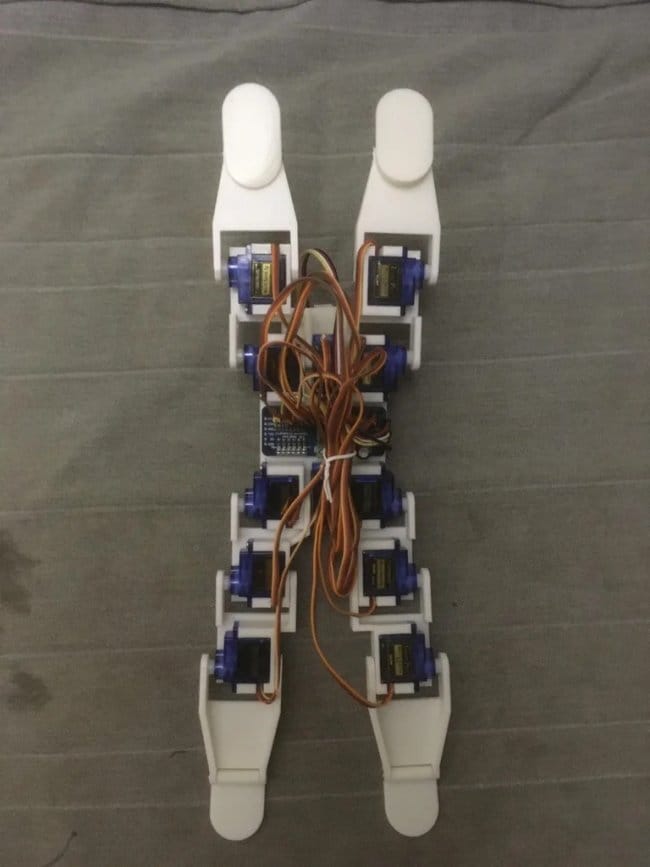
Кошка — дигиград, это означает, что она стоит или ходит на пальцах ног. Таким образом, у кошки есть заметные 3 сустава задних ног, в то время как у человека (плантиград) только 2 сустава. На передних лапах кошки пястные кости относительно короткие. Так что заметно два сустава для передних ног. Таким образом, робот-кошка имеет 2 сустава на передних ногах и 3 сустава на задних ногах, то есть 10 сервоприводов (у большинства других роботов-кошек и собак есть только 2 сустава для задних ног).
В голове и шее тоже должно быть много движущихся частей. В природе кошка наклоняет голову, шею, поворачивает и т.д. И хвост тоже довольно сложный орган в плане движения. Мастер решил не усложнять проект на данном этапе и будет устанавливать один сервопривод в хвост и два в шею.




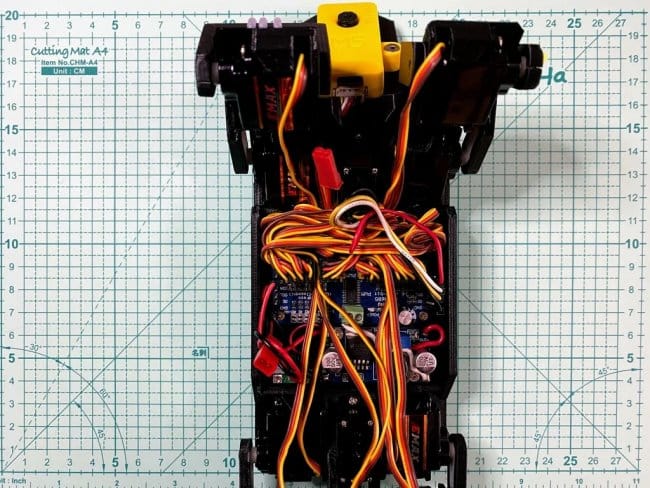
Шаг третий: электроника
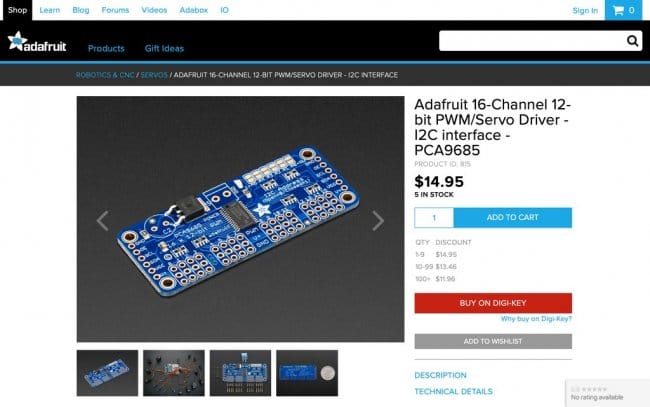
По моему предыдущему опыту, сервоприводы с прямым приводом с MCU GPIO — не лучший выбор. Гораздо стабильней установить отдельную плату драйвера.
В данном проекте мастер использует плату драйвера PCA9685.
ESP32 имеет связанный пример под названием FSBrowser. Это простой веб-сервер, на котором размещаются исходные веб-файлы, скопированные в SPIFFS. У него есть простой веб-редактор для изменения источника через Wi-Fi, а также простой API для чтения значений GPIO.
Мастер расширил его возможности:
Добавлен API сервоплаты PCA9685.
Добавлен сервер WebSocket
Добавлена веб-страница дизайна позы робота-кота.
Шаг четвертый: код
Загрузите и установите Arduino IDE:
https://www.arduino.cc/en/main/software
Следуйте инструкциям по установке, чтобы добавить ESP32:
arduino-esp32
Загрузите FSBrowserPlus: («Clone or Download» -> «Download ZIP»)
FSBrowserPlus
Загрузите последние библиотеки arduinoWebSockets: («Clone or Download» -> «Download ZIP»)
arduinoWebSockets
Импортируйте библиотеки в Arduino IDE. («Sketch» Menu -> «Include Library» -> «Add .ZIP Library» -> select downloaded ZIP file)
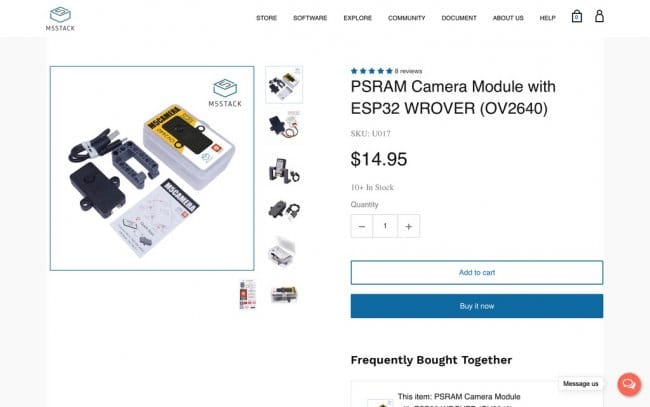
Подключите модуль камеры M5Stack с помощью USB-кабеля.
Откройте Arduino IDE
Открыть FSBrowserPlus
Измените ssid и пароль на свои собственные учетные данные точки доступа WiFi
Нажмите кнопку «Загрузить» в Arduino IDE.
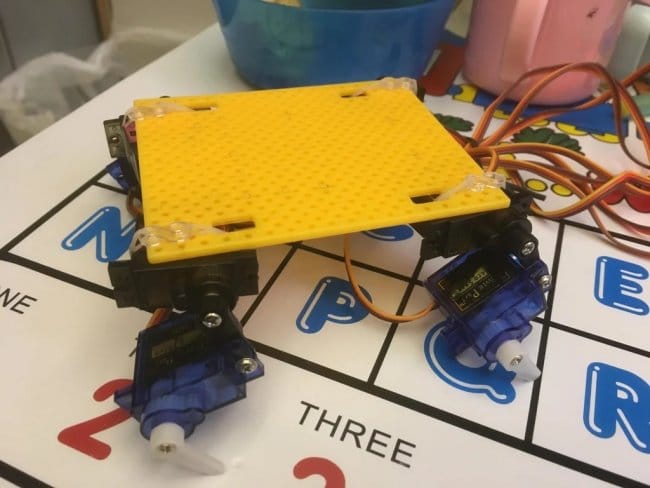
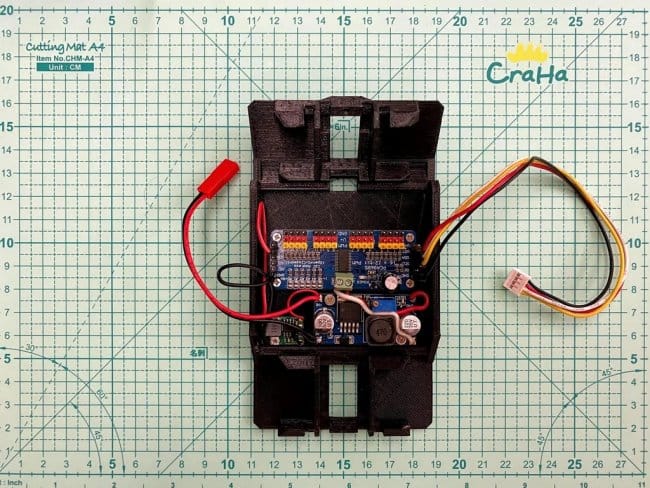
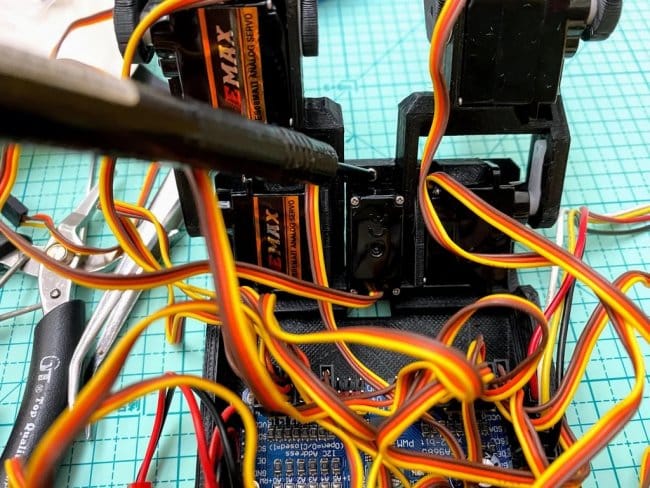
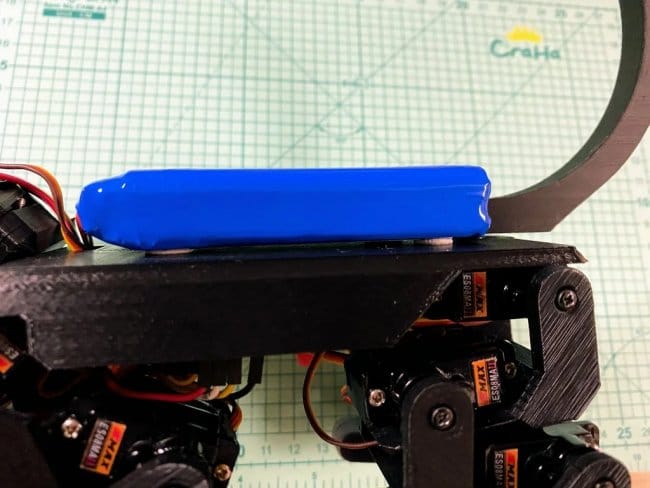
Шаг пятый: сборка
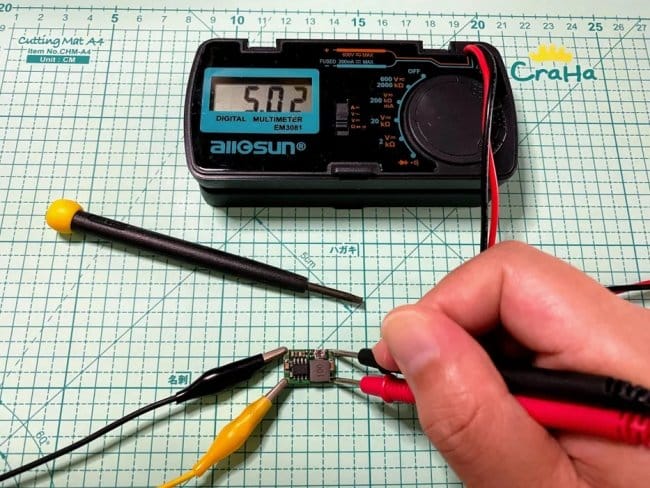
Дальше мастер производит монтаж электроники.
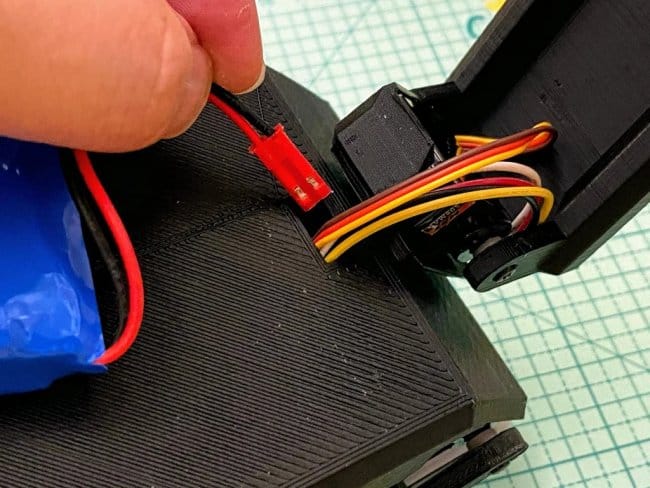
Штекер Lipo Battery
Вывод + ve — вход регулятора постоянного тока 5 В + вывод ve
Регулятор постоянного тока 6В INPUT + ve pin
-ve контакт— ВХОД регулятора 5 В постоянного тока -ve контакт
Регулятор 6V DC INPUT -ve pin
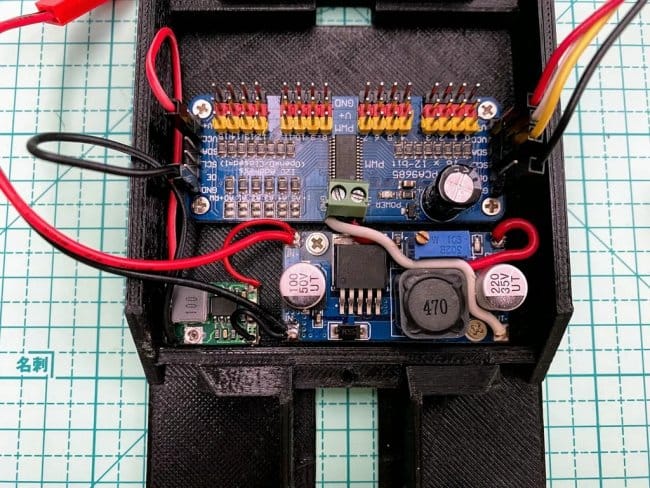
Плата сервопривода PCA9685
Вывод GND — Вывод регулятора 5V DC -ve
ВЫХОД регулятора постоянного тока 6 В — вывод
провод черный контактный
разъем SCL -> разъем желтого кабеля Grove
разъем SDA -> разъем белого цвета кабеля Grove
Вывод VCC -> ВЫХОД регулятора постоянного тока 5 В + вывод ve
Кабель Grove красный контакт
Вывод V + -> Регулятор постоянного тока 6 В ВЫХОД + вывод ve

Шаг шестой: положение сервопривода и подключение
Программа FSBrowserPlus устанавливает все сервоприводы в среднее положение диапазона поворота. Перед установкой сервоприводов лучше подключить сервоприводы к плате драйвера, подключить разъем Grove к модулю камеры M5Stack и подключить батарею, чтобы установить все положения сервоприводов в среднее положение.
Ниже список сервоприводов ос схемой подключения.
Порт 0: соединение левой передней ноги 1
Порт 1: шарнир левой передней ноги 2
Порт 2: сустав 1 левой задней ноги
Порт 3: сустав левой задней ноги 2
Порт 4: сустав левой задней ноги 3
Порт 5: поворот головы
Порт 6: наклон головы
Порт 7: не подключен
Порт 8: не подключен
Порт 9: не подключен
Порт 10: Хвост
Порт 11: сустав правой задней ноги 3
Порт 12: сустав правой задней ноги 2
Порт 13: сустав правой задней ноги 1
Порт 14: сустав правой передней ноги 2
Порт 15: сустав правой передней ноги 1
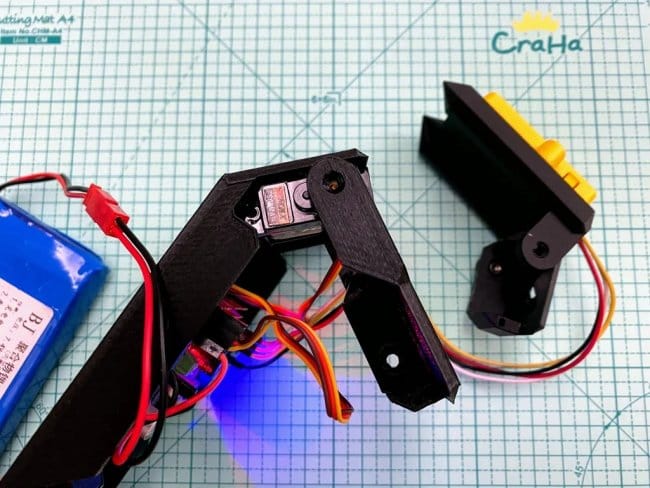
Шаг седьмой: сборка
Чтобы лапы не скользили и не разъезжались нужно установить на ни резинки.

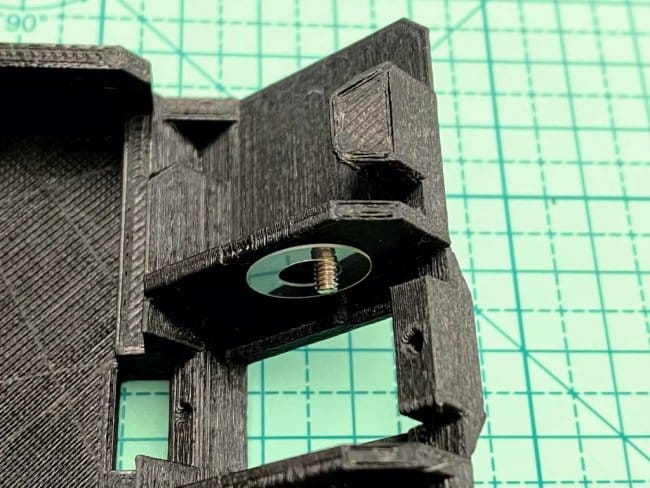

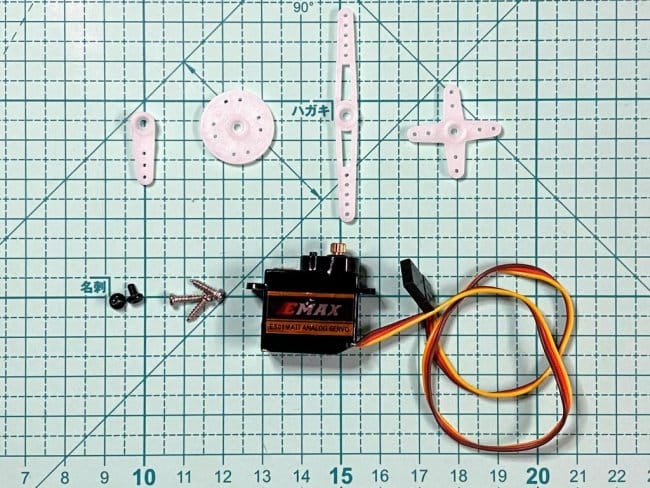
В комплект сервопривода входит несколько типов нейлоновых рычагов. Нужно установить самый короткий нейлоновый рычаг на сервоприводы, кроме сервопривода отвечающего за поворот головы.
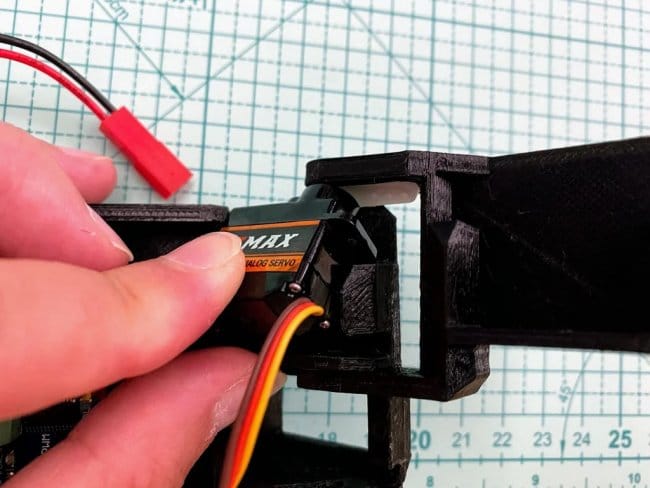
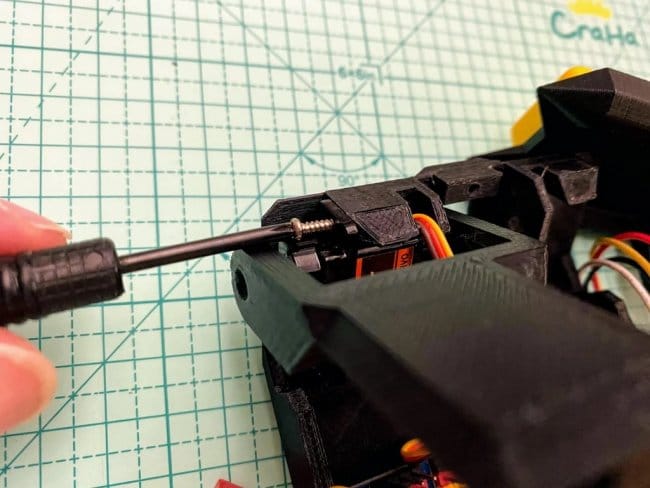
Дальше установить сервопривод в шарнир.
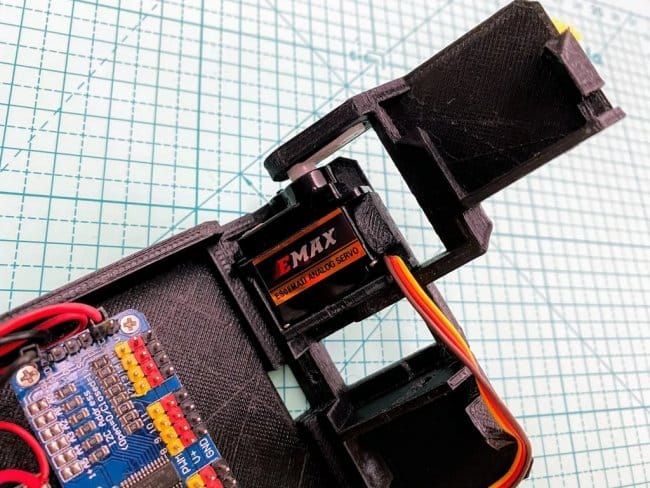
Подключите аккумулятор, чтобы убедиться, что положение сервопривода находится в середине диапазона поворота. Затем закрутите 2 крепежных винта с обеих сторон. Закрутите черный винт вместе с шарниром.
Повторите шаги установки шарнира и сервопривода для всех 10 суставов ног.
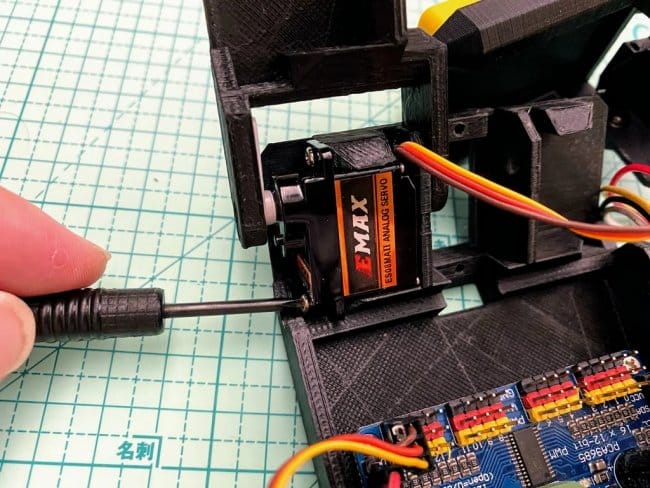
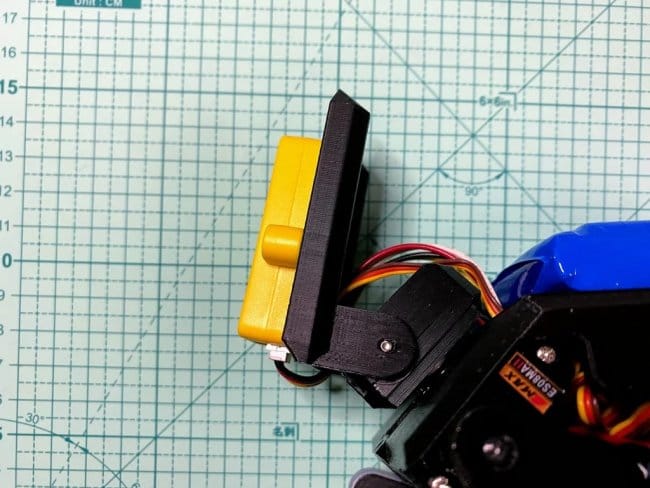
Сервопривод поворота головы может быть установлен как сверху, так и снизу, в зависимости от того, хотите ли мы иметь шею длиннее или короче.
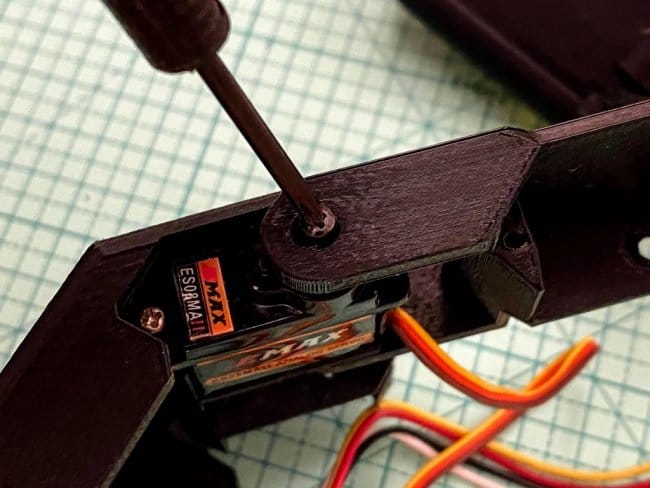
Метод установки сервопривода наклона головы такой же, как и для суставов ног. Затем устанавливаем модуль камеры M5Stack с помощью двух винтов M4 12 мм.
Сервопривод хвоста должен быть установлен с нижней стороны и зафиксирован винтом M2 8 мм.






Источник