Сейчас всё более популярным делается небольшая самодвижущаяся платформа с двумя колёсами, так называемый Сигвей, который изобрёл Дин Камен. Замечая трудности, с которыми сталкивается человек в коляске при восхождении на тротуар, он увидел возможность создать транспортное средство, которое может помочь людям передвигаться без особых усилий. Камен применил на практике свою идею о создании самобалансирующейся платформы. Первая модель была испытана в 2001 году и это было средство передвижения с кнопками на ручке. Она была разработана для людей с ограниченными возможностями и позволяла им самостоятельно передвигаться даже по пересеченной местности. Новая модель стала известна как “Сигвей РТ”, и уже позволяла рулить, наклоняя влево или вправо рычаг. В 2004 году она начала продаваться в Европе и Азии. Цена самых продвинутых современных моделей, например Segway PTi2 — около 5000 долларов. В последнее время китайские и японские компании создают устройства с различными модификациями и новаторской конструкцией. Некоторые даже делают подобные транспортные средства только с одним колесом, но давайте рассмотрим классический Сигвей.
Структурная схема Сигвея
Segway состоит из платформы и двух колес, размещенных поперечно с приводом от двух электромоторов. Сама система стабилизируется сложной электронной схемой, которая управляет двигателями, принимая во внимание не только наклоны водителя, но и состояние транспортного средства, что позволяет ему всегда оставаться в вертикальном стабильном положении. Водитель, стоя на платформе, контролирует скорость просто перемещая ручку вперед или назад, при наклоне вправо или влево — поворот. Плата управления отслеживает сигналы соответствующих датчиков движения и ориентирования (похожие на те, которые позволяют смартфонам менять ориентацию экрана), чтобы помочь бортовому микропроцессору точно ориентировать платформу. Главный секрет segway не столько в электро-механической части, сколько в коде, который учитывает физику движения со значительной математической точностью обработки данных и предсказания поведения.
Сигвей оснащен двумя бесщеточными электромоторами, сделанных с применением сплава неодим-железо-бора, способными развивать мощность до 2 кВт, благодаря литий-полимерному аккумулятору.
Детали для Сигвея
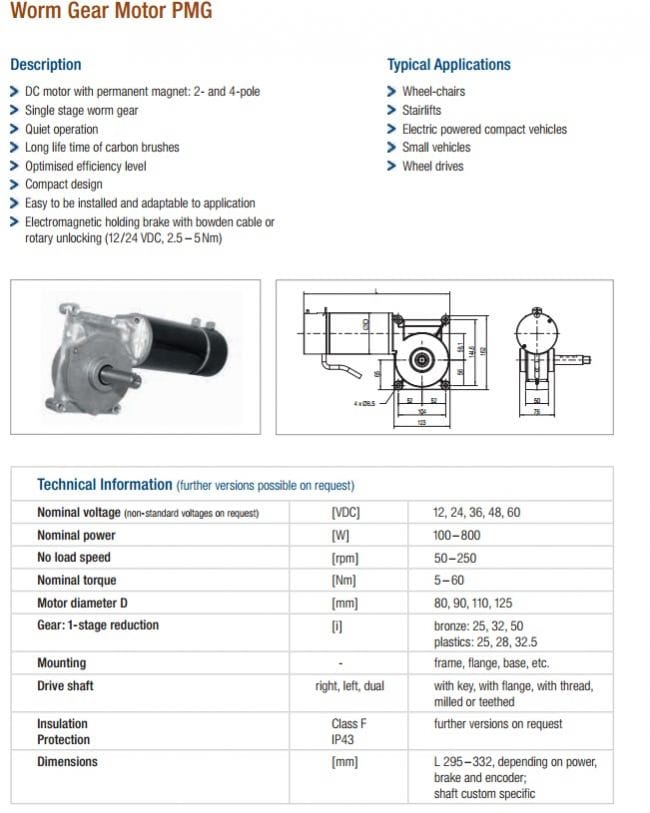
Для создания Сигвея нужно два мотора-редуктора с колесами, аккумулятор, электронная схема, платформа и руль.
Мощность двигателя недорогих моделей примерно 250W, что обеспечивает скорость до 15 км/ч, с относительно низким потреблением тока. Напрямую крутить колеса не могут, потому что высокое число оборотов этих моторов не позволяют получить нужную тягу. Аналогично тому, что происходит, когда вы используете передач вашего велосипеда: за счет увеличения передаточного отношения потеряется скорость, но увеличится усилие, прикладываемое к педали.
Платформа расположена ниже оси моторов. Батарея, вес которой достаточно высок, также находятся под подножкой в симметричном положении, что гарантирует даже без водителя на борту Сигвей остается в вертикальном положении. Кроме того, внутренняя механическая стабильность поможет узлу электронной стабилизации, которая полностью активна, когда водитель присутствует. Присутствие человека на платформе поднимает центр тяжести выше оси колеса, что делает систему нестабильной — это уже будет компенсировать плате электроники.
В принципе, такую вещь можно сделать и самому, купив нужный блок электроники на китайском сайте (они есть в продаже). Монтаж всех частей осуществляется винтами и гайками (не шурупы). Особое внимание должно быть уделено надлежащему натяжению цепи. Крепление батарей осуществляется через U-образные хомуты с небольшими резиновыми прокладками, чтобы обеспечить нужное давление. Рекомендуется добавлять двухсторонний скотч между батареей и платформой, так чтоб не было проскальзывания. Контрольная панель должна быть вставлена между двумя батареями и крепится специальными распорками.
Рычаг управления может быть, а может и нет — ведь сейчас популярны модели сигвеев и без него (минисигвей). В общем вещь интересная и не очень дорогая, так как по информации от знакомых — закупочная оптовая цена в Китае всего 100 долларов.
Maestro — 23.09.2016 — Прочитали: 5621
УЛУЧШЕНИЕ ФОНАРИКА С ЗУ ОТ 220V
Классический фонарик со встроенным зарядным устройством можно неплохо улучшить, добавив пару микросхем и 18650 АКБ.
Высококачественный усилитель для электрогитары — полное руководство по сборке и настройке схемы на JFET и LM386.
Усилитель мощности звука с двойной термостабилизацией — теория работы схемы и практическое тестирование.
Источник
Сайт про изобретения своими руками
МозгоЧины
Сайт про изобретения своими руками
Сегвей своими руками
Сегвей своими руками
Привет всем мозгочинам! В моем новом мозгопроекте я буду создавать своими руками самобалансирующееся транспортное средство или «Сегвей». Для данного проекта нужны базовые знания в электронике и умение работать вручную. Все механические компоненты можно приобрести в сети Интернет или в местном магазине.
СЕГВЕЙ состоит из платформы, на которой стоят в вертикальном положении, и двух боковых электродвигателей, приводимых в действие с помощью аккумуляторов. Алгоритм контроллера управления обеспечивает устойчивое положение. Перемещение сегвея контролируется водителем путем наклона его туловища, и ручкой для выбора направления движения влево/вправо. Поэтому вам понадобятся дополнительные компоненты, такие как контроллер, привод двигателя и датчик ускорения/гироскоп. Механическая конструкция изготовлена из дерева, поскольку оно имеет легкий вес, электрически изолировано и легко поддается обработке. Теперь приступим к изготовлению сегвея!
Шаг 1: Основные характеристики проекта
В настоящем проекте требуется изготовить устройство со следующими характеристиками:
— Достаточная мощность и устойчивость для езды по улице, и даже по гравийной дорожке; — 1 час непрерывной работы — Общая стоимость до 500€ евро — Возможность беспроводного управления — Запись данных на SD-карту для выявления поломок
Шаг 2: Проектирование системы
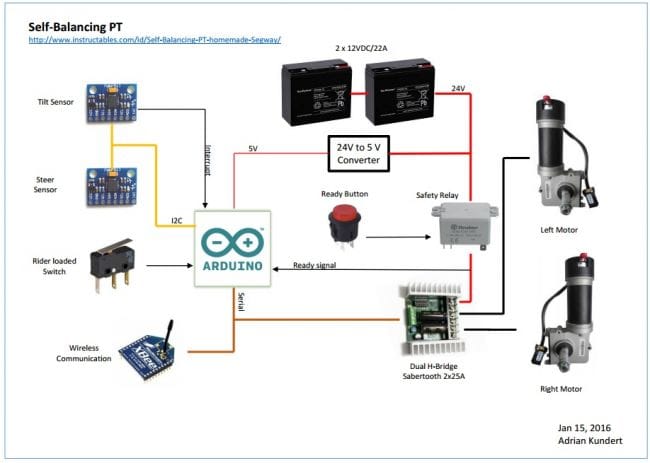
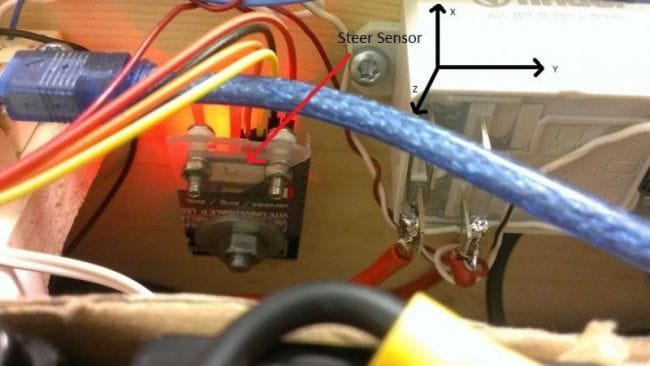
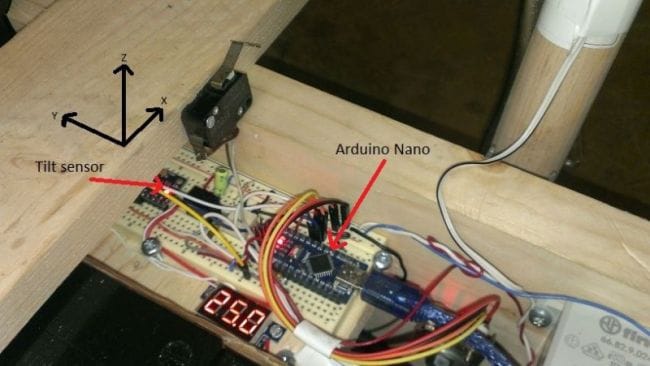
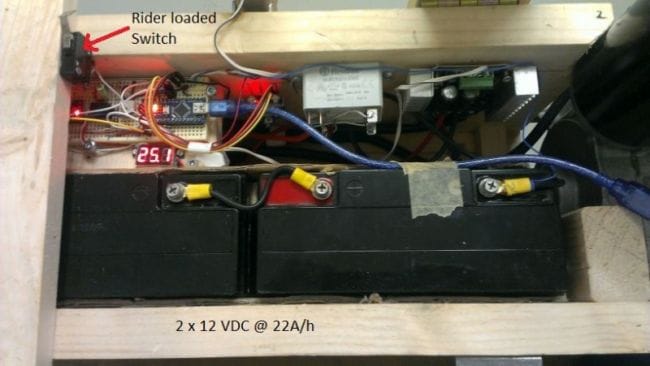
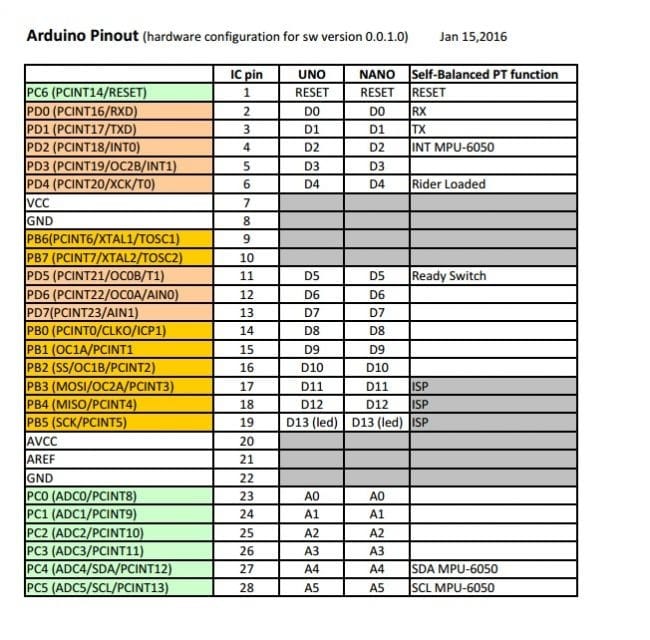
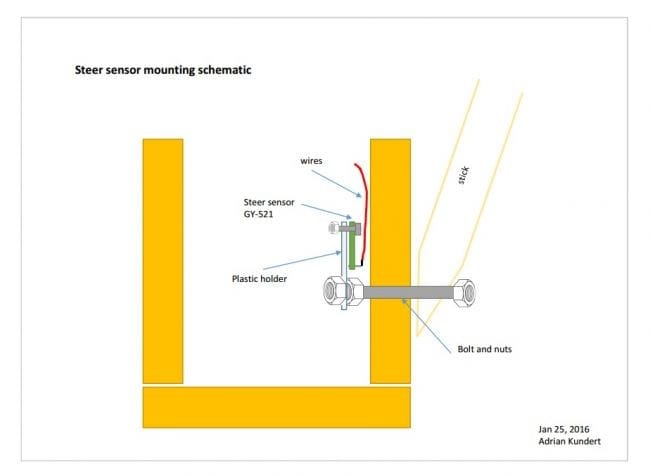
На прилагаемой диаграмме показана электрическая схема сегвея и привода двигателя. В качестве микроконтроллера Arduino можно выбрать Uno, Nano или ATmega 328 как отдельный чип. Аккумуляторы подключены последовательно, чтобы получить напряжение 24 В, необходимое для питания сдвоенной мостовой схемы управления для двигателей. Питание подается, пока водитель удерживает нажатой кнопку «ready». Для аварийного останова отпустите данную кнопку. При этом снимается питание с двигателей. Arduino использует последовательную связь в «пакетном» режиме на скорости 38 400 бод с мостовой схемой управления и беспроводным модулем XBee. Параметры наклона и управления измеряются с помощью датчика ускорения/гироскопа InvenSense MPU-6050 на модуле “GY-521”, располагаемого на 2 отдельных платах расширения. Связь с микроконтроллером Arduino происходит по шине I2C. Датчик наклона (адрес 0x68) запрограммирован на выполнение опроса каждые 20 мс и обеспечивает прерывание микроконтроллера Arduino. Второй датчик (адрес 0x69) «подтянут» к Arduino. Концевой выключатель нагрузки определяет, когда водитель становится на платформу, чтобы активировать алгоритм балансировки СЕГВЕЯ.
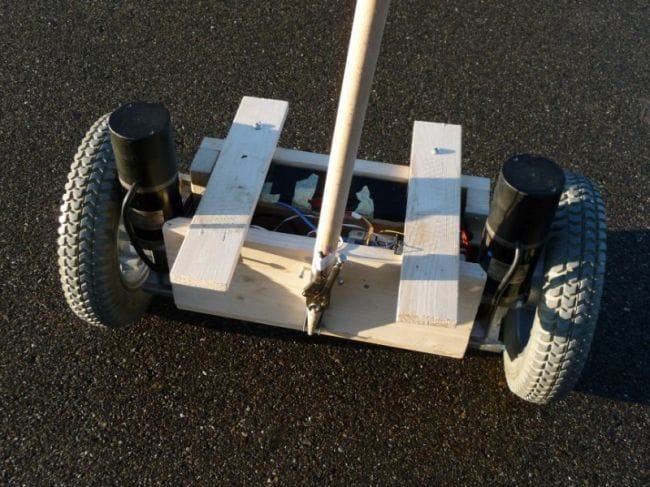
Шаг 3: Конструкция каркаса
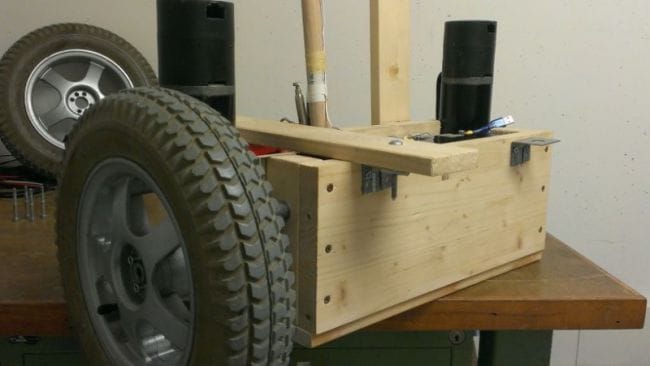
Колеса и двигатели с зубчатой передачей прикрепляются винтами на трех деревянных деталях, собранных в U-образной форме. Ручка представляет собой деревянную палку, удерживаемую болтом в передней деревянной детали. Важно, чтобы распределение веса СЕГВЕЯ происходило равномерно при вертикальном положении, которое является положением проезда. Поэтому необходимо учесть тяжелые компоненты, такие как аккумуляторы. В противном случае алгоритм балансировки может быть затруднительным.
В нашем случае аккумуляторы располагаются в задней части деревянной коробки для компенсации веса двигателя, располагаемого в центре. В промежутке между ними располагаются остальные электронные компоненты. К ручке изолентой прикреплена нажимная кнопка готовности движения “rider ready”.
Шаг 4: Электрическая схема
Проводка в деревянной коробке расположена в соответствии со схемой. Подключите выводы микроконтроллера Arduino к датчикам, мостовой схеме управления и двигателям в соответствии с представленной таблицей.
Датчик наклона установлен горизонтально вдоль оси х, а датчик управления вертикально вдоль оси у.
Шаг 5: Тестирование и настройка
Примите во внимание, что двигатели должны иметь достаточную мощность. Проверьте устройство в широкой и безопасной зоне, чтобы избежать получения травм или повреждений. Рекомендуется надевать защитные щитки и шлем.
Выполните пошаговую процедуру. Начните с программирования микроконтроллера Arduino (загрузите исходный код), далее проверьте связь с датчиками и мостовой схемой управления.
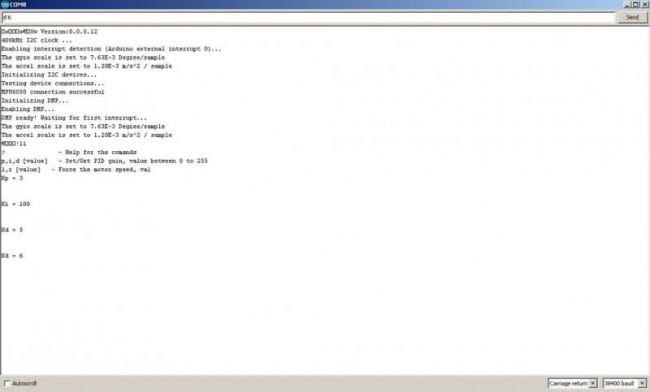
Arduino Terminal может использоваться для отладки программного кода и проверки работоспособности. Например, нужно настроить усиление ПИД-регулятора, поскольку оно зависит от механических и электрических параметров двигателя.
Усиление настраивается по данной процедуре: 1. Параметр Kp предназначен для балансировки. Увеличивайте Kp, пока балансировка станет нестабильной, Ki и Kp остаются 0. Незначительно снизьте Kp для получения устойчивого состояния. 2. Параметр Ki предназначен для ускорения/снижения ускорения при наклоне. Увеличьте Ki для получения правильного ускорения, чтобы избежать падения при наклоне вперед, Kp остается 0. Теперь балансировка должна стать стабильной. 3. Параметр Kd используется для компенсации включения и возврата к устойчивому положению.
В программе Terminal, вы можете выполнять различные команды «?». ? – Помощь при выборе команд p,i,d [целочисленное значение] — Установите/Получите усиление ПИД-регулятора, значение от 0 до 255 r [целочисленное значение] – принудительное увеличение скорости двигателя, значение от -127 до 127 v – версия программного обеспечения С помощью команды «p» вы получаете доступ к параметру Kp. Команда «p 10» позволяет установить Kp до значения 10.
После подачи питания на Arduino выполняется инициализация датчиков и переход в состояние ожидания. При нажатии нажимной кнопки происходит передача управляющего сигнала в контроллер СЕГВЕЯ, находящегося в вертикальном положении, который готов для активации двигателей для перемещения вперед или назад в зависимости от первоначального положения. С этого момента кнопку нужно держать нажатой постоянно, в противном случае двигатели выключатся, и контроллер перейдет в состояние ожидания. После достижения вертикального положения, контроллер ожидает сигнал концевого выключателя нагрузки “Водитель на месте”, который обычно нажимают ногой, когда водитель находится на платформе. После этого запускается алгоритм балансировки и происходит активация двигателей вперед или назад для того, чтобы остаться в вертикальном положении. Наклон вперед создает поступательное движение вперед и наоборот. Нахождение в наклоненном положении приводит к ускорению движения. Наклон в противоположном направлении приводит к снижению скорости. Для перемещения влево и вправо используйте ручку.
Шаг 6: Демо
Смотрите ниже видео готового устройства и спасибо за внимание!
Источник
Segway (гироскутер) своими руками
В этой статье будет рассмотрено создание самобалансирующегося средства передвижения или просто «Сегвей». Практически все материалы для создания данного устройства легкодоступны.
Само устройство представляет из себя платформу на которой стоит водитель. Путем наклона туловища осуществляется управление двумя электрическими двигателями посредством цепи схем и микроконтроллеров, отвечающих за балансировку.
-Беспроводной модуль управления XBee. -микроконтроллер Arduino -аккумуляторы -датчик InvenSense MPU-6050 на модуле “GY-521”, -деревянные бруски -кнопка -два колеса и прочее, указанное в статье и на фотографиях.
Шаг первый: Определение требуемых характеристик и проектирование системы.
При создании этого устройства автор старался, чтобы оно укладывалась в такие параметры как: -проходимость и мощность, необходимая для свободного перемещения даже по гравию -аккумуляторы достаточной емкостью, чтобы обеспечить как минимум один час беспрерывной работы устройства -обеспечить возможность беспроводного управления, а так же фиксирование данных о работе устройства на SD-карту для выявления и устранения неисправностей.
Кроме того желательно, чтобы затраты на создание подобного устройства были меньше чем заказ оригинального внедорожного гироскутера.
Согласно приведенной ниже диаграмме, вы можете увидеть схему электрической цепи самобалансирующегося транспортного средства.
Выбор микроконтроллера для управления системами Сегвея разнообразен, автор система Arduino наиболее предпочтительна из-за своих ценовых категорий. Подойдут такие контроллеры как Arduino Uno, Arduino Nano или можно взять ATmega 328 для использования в качестве отдельного чипа.
Чтобы запитать сдвоенную мостовую схему управления двигателей необходимо напряжение питания в 24 В, этого напряжения легко достигнуть путем последовательного подключения 12 В автомобильных аккумуляторов.
Система построена так, что питание на двигатели подается, только пока нажата кнопка старта, поэтому для быстрой остановки достаточно просто ее отпустить. При этом платформа Arduino должна поддерживать последовательную связь, как с мостовой схемой управления двигателей, так и с беспроводным модулем управления.
За счет датчика InvenSense MPU-6050 на модуле “GY-521”, обрабатывающего ускорение и несущего в себе функции гироскопа, измеряются параметры наклона. Датчик был расположен на двух отдельных платах расширения. По шине l2c поддерживается связь с микроконтроллером Arduino. Причем датчик наклона с адресом 0x68 был запрограммирован таким образом, чтобы выполнять опрос каждый 20 мс и обеспечивать прерывание микроконтроллера Arduino. Другой датчик имеет адрес 0x69 и он подтянут прямо к Arduino.
Когда пользователь встает на платформу скутера, срабатывает концевой выключатель нагрузки, который и активирует режим алгоритма для балансировки Сегвея.
Шаг второй: Создание корпуса гироскутера и установка основных элементов.
После определения основной концепции схемы работы гироскутера, автор приступил к непосредственной сборке его корпуса и установке основных деталей. В качестве основного материала послужили деревянные доски и бруски. Дерево мало весит, что положительно отразится на длительности заряда аккумуляторов, кроме того древесина легко обрабатывается и является изолятором. Из этих досок был сделан короб, в который будут устанавливаться аккумуляторы, двигатели и микросхемы. Таким образом, получилась U-образная деревянная деталь, на которую за счет болтов крепятся колеса и двигатели.
Передача мощности двигателей на колеса будет идти за счет зубчатой передачи. Во время укладки основных компонентов в корпус Сегвея очень важно проследить, чтобы вес распределялся равномерно при приведении Сегвея в рабочее вертикальное положение. Поэтому если не учесть распределение веса от тяжелых аккумуляторов, то работа балансировки устройства будет затруднена.
В данном случае автор расположил аккумуляторы сзади, так, что компенсировать вес двигателя, который находится в центре корпуса устройства. Электронные составляющие устройства были уложены в место между двигателем и аккумуляторами. Для последующего тестирования так же была прикреплена временная кнопка старта на ручке Сегвея.
Шаг третий: Электрическая схема.
Шаг четвертый: Тестирование и настройка устройства.
После проведения предыдущих этапов, автор получил модель Сегвея для тестирования.
При проведении тестирования важно принять во внимание такие факторы как безопасность зоны тестирования, а так же защитная экипировка в виде защитных щитков и шлема для водителя.
Начать тестирование Сегвея автор решил с загрузки кода на микроконтроллер и проверки его связи со схемами управления и датчиками.
Для проверки работоспособности кода, а так же возможного поиска проблем для их последующей отладки отлично походит Arduino Terminal . Важно правильно настроить усиление ПИД-регулятора, которое будет зависеть от параметров используемого двигателя.
После проведения настройки регулятора на контроллер подается питание, и датчики переходят в состояние ожидания. Затем нажимается кнопка старта, и включаются двигатели. Путем наклона Сегвея водитель управляет движением за счет работы алгоритма балансировки.
На видео ниже показана работа собранного устройства гироскутера:







 Классический фонарик со встроенным зарядным устройством можно неплохо улучшить, добавив пару микросхем и 18650 АКБ.
Классический фонарик со встроенным зарядным устройством можно неплохо улучшить, добавив пару микросхем и 18650 АКБ. Высококачественный усилитель для электрогитары — полное руководство по сборке и настройке схемы на JFET и LM386.
Высококачественный усилитель для электрогитары — полное руководство по сборке и настройке схемы на JFET и LM386. Усилитель мощности звука с двойной термостабилизацией — теория работы схемы и практическое тестирование.
Усилитель мощности звука с двойной термостабилизацией — теория работы схемы и практическое тестирование.