Как сделать робота (боевую турель)

Кто занимается робототехникой, конечно, хочет сделать робота своими руками. Но далеко не у всех, особенно у начинающих, хватает знаний для создания робота самостоятельно. И сразу возникает вопрос: как сделать робота, если очень хочется?
Для создания робота, помимо идеи, понадобятся различные по сложности радиокомпоненты. Также не обойтись без шасси для будущего робота и различных механических частей. Конечно, всё будет зависеть от размаха вашего проекта. Но без механики вряд ли вам обойтись.
Возможно, кто-то предпочитает использовать готовый конструктор для создания различных роботов. К примеру, «Lego». В данном конструкторе имеется всё необходимое для создания роботов различной сложности, но такой конструктор не из дешёвых. Да и согласитесь, куда приятнее созерцать свое творение, если оно было изготовлено самостоятельно от «А» до «Я», от набросков на листе бумаги до полного его воплощения в задуманных масштабах.
Для таких творческих людей, не боящихся поработать своими руками совместно со своим ребенком сделать робота, а также для детских радиокружков была разработана модель «Турель». Конечно, это не робот, но на основе моего проекта можно создать различные увлекательные роботизированные устройства. Тем более, что всё выполнено из бюджетных материалов.
Сборка поворотного шасси
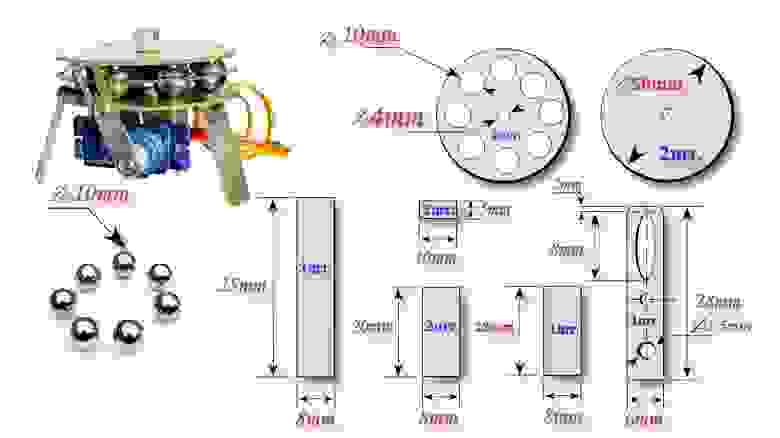
Поворотное шасси для турели выполняется из двухстороннего фольгированного текстолита, как и большинство комплектующих для данной самоделки. Данный материал очень лёгкий и простой в обработке и имеет достаточную прочность. При помощи ножниц по металлу можно вырезать любую подходящую деталь.
Круговое вращение орудия в данном проекте не требуется, так как нужен небольшой сектор обстрела. Соответственно, для данной задачи подошёл бюджетный сервопривод SG90.
Шасси должно удерживать на месте турель при выстреле и не дать ей перевернуться, так как при испытании данной модели отдача орудия от выстрела оказалась достаточно большой.
Для поворотного шасси я применил самодельный упорный подшипник. Таким образом, шасси получилось поворотным, и благодаря весу металлических шариков являлось достаточно устойчивым, хотя при выстреле турель всё-таки слегка перемещается. Пришлось даже уменьшить немного силу выстрела.
Сборка орудия или пушки
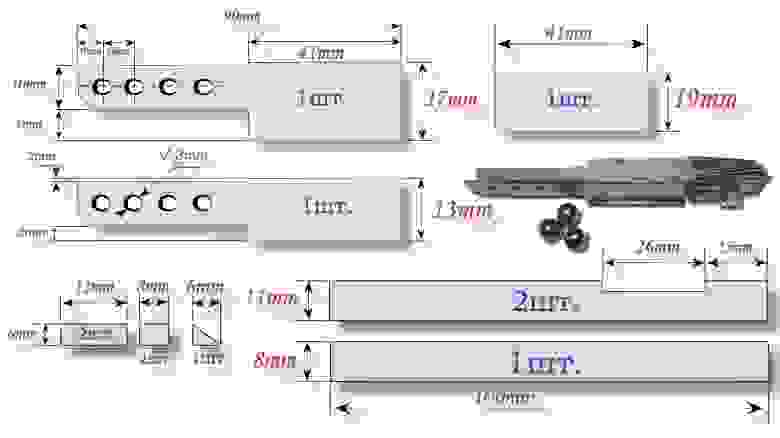
С пушкой для турели пришлось повозиться. Из многочисленных опробованных конструктивных вариантов я выбрал данный вариант (рис. 1). В таком исполнении в ствол легко можно было загрузить металлические шарики диаметром 8 мм, так как конструкция пушки была весьма крепкой. Чтобы шарик не катался по стволу и его положение было четко зафиксированным, в стволе были сделаны сквозные отверстия.
Установка орудия на поворотное шасси и механизм взвода и спуска орудия

Установив на поворотном шасси орудие, я начал процесс сборки взводящего механизма. Осуществить данную цель мне помог сервопривод SG90. Усилия сервопривода достаточно, чтобы натянуть пружины. Как только ударная часть оказывалась в позиции, срабатывала защёлка, которая и удерживала ствол во взведённом состоянии. В таком положении взводящий рычаг сервопривода, размещённый в нижней части ствола, просто мешал осуществить выстрел.
Для реализации выстрела я применил простой и надежный способ. Как только защёлка зафиксировала ствол (рис. 1), сервопривод должен возвращаться в исходное состояние. В определённый момент своего пути сервопривод нажимал на спусковой механизм и одновременно сбрасывал защёлку, удерживающую ударную часть. При этом производился выстрел.
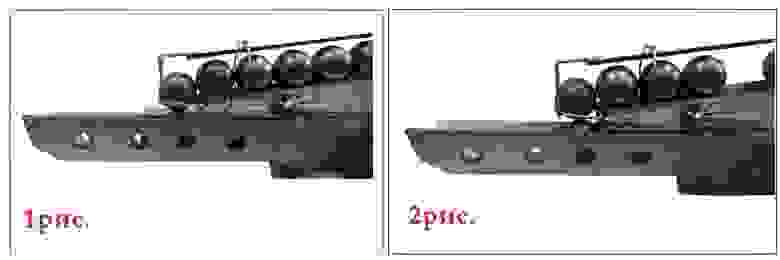
Магазин рассчитан на 12 металлических шариков, взятых из подшипника, хотя можно запросто стрелять крупными бусинками. Чтобы упростить подачу шариков в ствол, я расположил магазин под небольшим углом. Загрузка ствола шариками осуществлялась под собственным весом, они просто скатывались туда, куда нужно.Начальное положение ударника перекрывает подачу металлических шариков (рис. 1). Как только ударник уходит, верхний шарик падает.
Но возникла проблема: при падении металлический шар начинал катиться. Чтобы ее решить, я сделал боковые отверстия в стволе. Они удерживают положение шарика, не давая ему перемещаться (рис. 2).
Применяемая электроника


Для радиоуправления роботизированной турели я применил плату, разработанную ранее для проекта «Осадная катапульта»
Учитывая, что вряд ли кто-то будет повторять радиоджойстик, изготовленный мною, так как он достаточно сложен, представляю вариант значительно более простой в исполнении, хотя разводку на печатной плате оставил под радиомодуль.
Как вы видите из принципиальной схемы, джойстик достаточно простой и состоит из трех тактовых кнопок, подключенных к микроконтроллеру. Две тактовые кнопки осуществляют поворот турели вправо либо влево. Оставшаяся тактовая кнопка даёт команду на выстрел. Те, кто имеют определенные знания в программировании микроконтроллеров, могут написать свою версию программы для микроконтроллера.
К примеру, оснастив устройство датчиком расстояния, можно реализовать автоматический огонь, как только будет обнаружен объект на заданном расстоянии. Поскольку данную самоделку я разрабатывал как базовую модель для детского радиокружка, то соответственно комплектация и сложность изделия также могут меняться.
Источник
Как сделать турель своими руками
- Автоматическая турель на Raspberry Pi.
- Главная
- Проекты роботов
- Земля
- Автоматическая турель на Raspberry Pi.

Автоматическая турель на Raspberry Pi.
Страйк больная турель “Nerf gun” отслеживающая движение, с двумя типами управления: автономным и ручным, работающий на Raspberry Pi.
Используемые части.
Используемый список деталей выглядит следующим образом:
Детали для 3D принтера:
История
У каждого из нас есть дорогие вещи которые нуждаются в защите, но мы не можем быть одновременно везде. К счастью, используя программное обеспечение для распознавания изображений и обнаружения движения, мы можем создаватьавтоматические турели, которыем смогут защитить наши самые ценные вещи даже в наше отсутствие. Будь то эти надоедливые животные, которые разрушают Ваш сад или члены Вашей семьи, портящие ваши вещи, Вы можете создать свою собственную защитную турель для защиты от них.
В этом проекте мы построим умную Страйкбольную турель (или «Nerf Gun») с возможностью отслеживания движения реализованном на Raspberry Pi 3. Турель полностью автономна, когда обнаруживает движение она вращается и начинает вести огонь. Существует также интерактивный режим, чтобы Вы могли управлять турелью вручную с клавиатуры. Мы использовали пневматическое оружие для этого проекта, но вы можете легко изменить эту сборку, чтобы вместо этого использовать Nerf. Этот проект небольшой, легкий и полностью работает от батареек.
Мы создали два отдельных режима работы: Интерактивное и Обнаружение движения. Интерактивный позволяет удаленно управлять турелью и транслировать видео в реальном времени. Обнаружение движения использует openCV и компьютерное зрение для отслеживания движущихся целей перед камерой.
Поскольку это устройство запускает поражающие элементы, при работе с турелью, пожалуйста, используйте необходимые меры предосторожности (очки для защиты глаз).
Просмотрите данное видео с детальным описанием как построить проект.
Шаг 1: Создание Основания
Для начала Вам потребуется лист МДФ, на нём Вам нужно с помощью карандаша начертить 2 круга диаметром 22 см и далее вырезать их используя ручную пилу или электрический лобзик.


В кружках из МДФ, Вам необходимо найти центр и пометить его карандашом. Мотор будет монтироваться в центр одного круга, так же мы будем использовать деталь напечатанную на 3д принтере которая будет монтироваться в центр второго круга.
Для изготовления отверстий под крепления мотора, Вам необходимо взять кусочек бумаги и прислонить к мотору со стороны креплений, продырявив бумагу валом от двигателя. Используйте карандаш, чтобы проткнуть бумагу в местах креплений. Эта бумага может использоваться как шаблон для нанесения местоположений отверстий на круге из МДФ. Цент этого шаблона нужно приложит к центру одного из кругов МДФ, и просверлить дрелью 4 отверстия по шаблону для крепежа используя сверло 3 мм. По центру просверлите отверстие используя сверло 6 мм.




Используйте 4 винта М3 и четыре шайбы, для установки шагового двигателя в МДФ круг, хорошо затяните их с помощью отвертки. Приложите напечатанную деталь на 3д принтере к центру второго круга, отметьте карандашом 3 отверстия под крепление. С помощью отвертки или шуроповерта, вкрутите 3 винта #8, закрепив тем самым напечатанную деталь на круге. Далее Вам нужно круг с двигателем приложить сверху на круг с напечатанной деталью, что бы вал двигателя встал в центр детали.
Источник