- Автомагнитолы Teyes
- ВНИМАНИЕ! Подключение устройства требует специальных знаний! Неправильное подключение устройства может привести к поломке автомобиля!
- Lada vesta canbus своими руками
- Vesta Info — Teyes
- Версия 1.0
- Версия 1.1
- Скачать оболочку Vesta Info для версии 1.1
- Проводка CAN на младших комплектациях Lada Vesta
- Настройка CAN-BUS декодера под Lada Vesta
- Доработка магнитолы Android при помощи модуля CAN-BUS
Автомагнитолы Teyes
ВНИМАНИЕ! Подключение устройства требует специальных знаний! Неправильное подключение устройства может привести к поломке автомобиля!
1. Назначение: Передача всех пакетов информации из кан шины автомобиля в андроид MMS, формат принимаемых пакетов по USB — RealDash Can, Lin 01 VolksWagen для RockChip и Other Lada для MMS Teyes (в остальных случаях работа Lin не гарантируется)
новый версии 3_2, 5-ти и 4-x пиновая ответная часть, если установлен 4 пиновый разъем то нет пина GND в остальном совпадает с 5-ти пиновым, Цвет Can Hi — Зеленый, Can Low — белый, остальные цвета могут отличаться — ориентироваться требуется на нумерацию разъема.
3. Vesta Подключение кан шины: Соединить пин в пин Can Low в 17 пин разъема Mini Iso а Can Hi в 20 пин. Проверяйте ответные пины! может быть так, что 17 и 20 пустой! нужно тянуть от приборки или от OBD — цена вопроса 2 провода или провода кан шины 

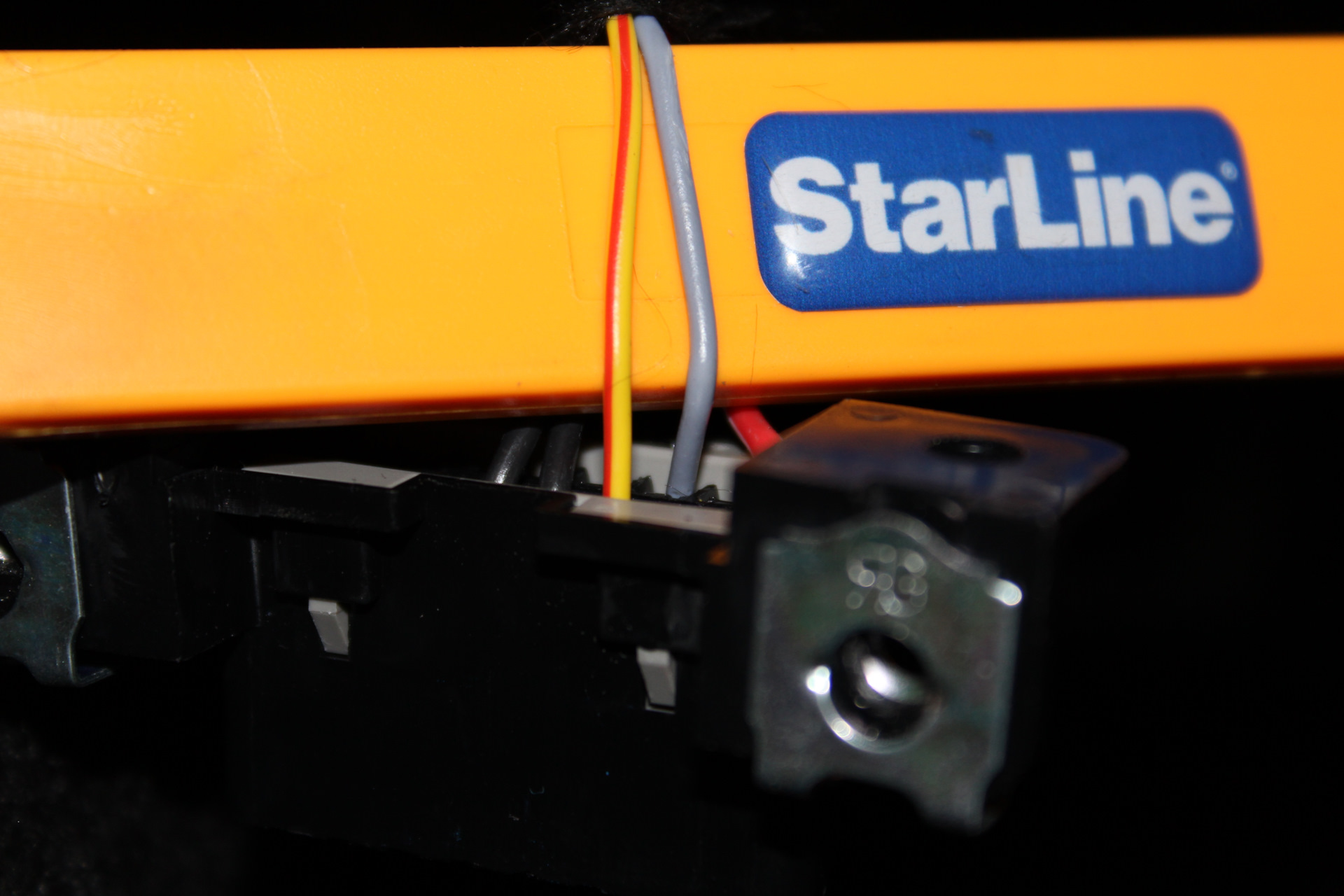
3.1. Teyes и сними совместимые на базе процессора SC9853 или UIS7862: подключаем в С7, также ориентируемся на фото 

3.2. USB подключить в любой свободный порт (Рекомендую в одинарный)
4.1 Teyes 
настройки кан пароль обычно 3368 или 168 выбрать Other или Teyes Lada version 1.0,

также динамические линии включаются из настроек в другом меню (на разных ммс по разному). ! , и в этом же меню статические линии отключить.

4.2 Основная программа общая для всех MMS и автомобилей скачивается из PlayMarket : VestaXR (для xRay, Сандеро, Логан2, Dutster она же, переключение из настроек программы) — наиболее оперативная поддержка клиентов в канале Telegram CMGAISD
Аналоговые входы, срабатывают от 4,5 в до 24в — Работа кнопок — Напряжение есть (Значение 2) или нет (Значение 1) — пакет данных USB ID 191
Key1- PC7 — 0 байт значение 1 или 2 — Омывайка
Key2- PC8 — 1 байт значение 1 или 2 — Газ бензин
Key3- PC9 — 2 байт значение 1 или 2 — противотуманные фары
Пример пакета USB
44 33 22 11 91010000 02 02 02 00 00 00 00 00 — все кнопки нажаты
Источник
Lada vesta canbus своими руками
Обсуждение CANBUS декодер
Другое
Обсуждение»
- Для сравнения устройства с конкурентами и по вопросам выбора устройств обращайтесь в раздел:Выбор и сравнение
- Перед размещением фотографии ознакомьтесь с темойРабота с изображениями на форуме
- Сообщения, не относящиеся к теме обсуждения (оффтоп), удаляются без предупреждения.
Машина: Lada Vesta
Приветствую форумчане. Давно у меня появилась идея создать CANBUS decoder для Lada Vesta под ГУ на базе PX5. Суть в том, что таких устройств для этой машины нет (точнее недавно появилась под ГУ от какого-то производителя и есть еще один, который применяется только для динамических парковочных линий и по достаточно кусачей цене).
Прошу Вас помочь мне в этом деле. На данный момент хочу попробовать только для динамических линий, а далее как пойдет.
Как идет ход моих мыслей:
— на драйве нашел статью по снифферу для CAN.

Как я понял LS CAN мне в этой схеме пока что не нужен. А MS CAN я буду подключать к пинам 6 и 14 раъема OBD (в Весте одна CAN-шина, по факту у меня есть CAN-H и CAN-L, штатно выведенные к ГУ).
BT модуля по идее у меня не будет, вместо этого UART я подключу к ГУ?
Питание можно сделать, а можно по идее запитаться от USB ГУ?
И еще вопрос — возможно ли сделать прошивку микроконтроллера через ГУ, чтобы не выводить лишних проводов и каждый раз не разбирать? Апк написать возможно смогу, если это возможно.
Один форумчанин согласился предоставить мне несколько команд. Пока что я ограничусь углом поворота руля:
Открытый на данный момент вопрос — в каком виде нужно передать информацию по UART в ГУ или где можно запросить эту информацию.
Исходный код MTCCanbus по ссылке
Добавляю код из поста на драйве. Буду пытаться переписать под считывание только нужной информации (пока только угол поворота угла. Кто поможет переписать, буду благодарен. Код буду обновлять по мере правки.
#include
/* ASTRA-H sniffer
* Uses STM32duino with Phono patch. Must add 33 and 95 CAN speeds
*/
// Instanciation of CAN interface
HardwareCAN canBus(CAN1_BASE);
CanMsg msg ;
CanMsg *r_msg;
CAN_STATUS Stat ;
void CANSetup(CAN_GPIO_MAP remap, CAN_SPEED speed)
<
// Initialize CAN module
canBus.map(remap); // This setting is already wired in the Olimexino-STM32 board
Stat = canBus.begin(speed, CAN_MODE_NORMAL);
canBus.filter(0, 0, 0);
canBus.set_irq_mode(); // Use irq mode (recommended), so the handling of incoming messages
// will be performed at ease in a task or in the loop. The software fifo is 16 cells long,
// allowing at least 15 ms before processing the fifo is needed at 125 kbps
Stat = canBus.status();
if (Stat != CAN_OK)
Serial1.print(«Initialization failed»);
>
CAN_TX_MBX CANsend(CanMsg *pmsg) // Should be moved to the library?!
<
CAN_TX_MBX mbx;
do
<
mbx = canBus.send(pmsg) ;
#ifdef USE_MULTITASK
vTaskDelay( 1 ) ; // Infinite loops are not multitasking-friendly
#endif
>
while(mbx == CAN_TX_NO_MBX) ; // Waiting outbound frames will eventually be sent, unless there is a CAN bus failure.
return mbx ;
>
// Send message
// Prepare and send a frame containing some value
void SendCANmessage(long byte dlength=8, byte d0=0x00, byte d1=0x00, byte d2=0x00, byte d3=0x00, byte d4=0x00, byte d5=0x00, byte d6=0x00, byte d7=0x00)
<
// Initialize the message structure
// A CAN structure includes the following fields:
msg.IDE = CAN_ID_STD; // Indicates a standard identifier ; CAN_ID_EXT would mean this frame uses an extended identifier
msg.RTR = CAN_RTR_DATA; // Indicated this is a data frame, as opposed to a remote frame (would then be CAN_RTR_REMOTE)
msg.ID = id ; // Identifier of the frame : 0-2047 (0-0x3ff) for standard idenfiers; 0-0x1fffffff for extended identifiers
msg.DLC = dlength; // Number of data bytes to follow
// Prepare frame : send something
msg.Data[0] = d0 ;
msg.Data[1] = d1 ;
msg.Data[2] = d2 ;
msg.Data[3] = d3 ;
msg.Data[4] = d4 ;
msg.Data[5] = d5 ;
msg.Data[6] = d6 ;
msg.Data[7] = d7 ;
CANsend(&msg) ; // Send this frame
>
#define PC13ON 0
#define PC13OFF 1
#define DELAY 250
/* global variables */
void setup()
<
pinMode(PC13, OUTPUT); // LED
digitalWrite(PC13, PC13ON);
Serial1.begin(115200);
Serial1.println(«Hello World!»);
Serial1.println(«Starting Astra-H sniffer v01 program»);
for (bool flag=0;flag==0;)
<
Serial1.print(«trying MS CAN. «);
CANSetup(CAN_GPIO_PB8_PB9,CAN_SPEED_95);
canBus.free();canBus.free();canBus.free();canBus.free();canBus.free();canBus.free();canBus.free(); // make sure receive buffer is empty
delay(200); // wait for receiving something
if ( ( r_msg = canBus.recv() ) != NULL )
<
Serial1.println(» OK!»);
flag=1;
>
else
<
Serial1.println(» FAILED!»);
delay(500);
Serial1.print(«trying LS(SW) CAN. «);
CANSetup(CAN_GPIO_PB8_PB9,CAN_SPEED_33);
canBus.free();canBus.free();canBus.free();canBus.free();canBus.free();canBus.free();canBus.free(); // make sure receive buffer is empty
delay(200); // wait for receiving something
if ( ( r_msg = canBus.recv() ) != NULL )
<
Serial1.println(» OK!»);
flag=1;
>
else
<
Serial1.println(» FAILED!»);
delay(500);
>
>
>
Serial1.println(«Time (ms) ; ID ; Length ; B0 ; B1 ; B2 ; B3 ; B4 ; B5 ; B6 ; B7 «);
digitalWrite(PC13, PC13OFF);
>
void loop()
<
while ( ( r_msg = canBus.recv() ) != NULL )
<
digitalWrite(PC13, PC13ON); // LED shows that recieved data is being printed out
Serial1.print(millis());
Serial1.print(«; «);
Serial1.print(r_msg->ID, HEX);
Serial1.print(«; «);
Serial1.print(r_msg->DLC);
Serial1.print(«; «);
Serial1.print(r_msg->Data[0], HEX);
Serial1.print(«; «);
Serial1.print(r_msg->Data[1], HEX);
Serial1.print(«; «);
Serial1.print(r_msg->Data[2], HEX);
Serial1.print(«; «);
Serial1.print(r_msg->Data[3], HEX);
Serial1.print(«; «);
Serial1.print(r_msg->Data[4], HEX);
Serial1.print(«; «);
Serial1.print(r_msg->Data[5], HEX);
Serial1.print(«; «);
Serial1.print(r_msg->Data[6], HEX);
Serial1.print(«; «);
Serial1.println(r_msg->Data[7], HEX);
digitalWrite(PC13, PC13OFF);
canBus.free();
> // close while
> // close void loop
Сообщение отредактировал Demacr — 15.08.19, 01:03
Источник
Vesta Info — Teyes
Популярность седана российского производителя не могла пройти мимо именитого китайского разработчика магнитол. Да и про любовь наших соотечественников к всяческой кастомизации и тот факт, что штатная MMC весты работает на древнем Windows CE китайские инженера совсем не забыли. И потому на свет появилась отдельная оболочка для работы с CAN-BUS декодером автомобиля Lada Vesta.
Будьте внимательны! На автомобиле Lada Vesta проводка CAN выведена к магнитоле только на максимальных комплектациях. На всех остальных придется самостоятельно прокладывать проводку от блока ВСМ до магнитолы.
Но появилась не сразу — существует две версии коробочки.
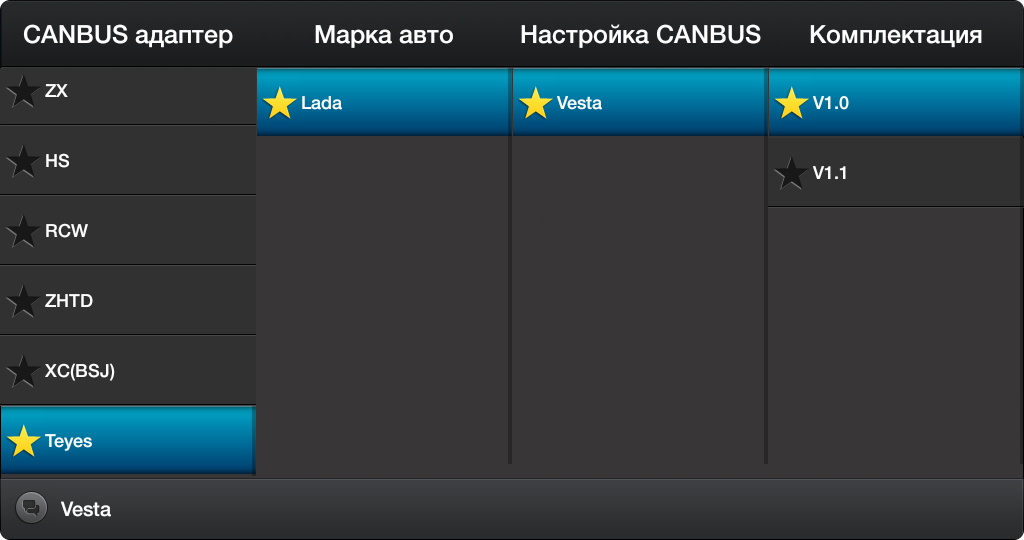
Версия 1.0
Первая — 1.0 — работает как и декодеры на любых других совместимых с Teyes автомобилях. На ней вся программная реализация работы с CAN-шиной сводится к отображению всплывающего окошка снизу.
Версия 1.1
Вторая — 1.1 — версия, которой китайцы нам как бы демонстрируют особую озабоченность российским рынком, выпуская отдельную реализацию CAN-модуля с персональной для него программной оболочкой.
Наглядную разницу можно увидеть на картинке:

Скачать оболочку Vesta Info для версии 1.1
Установка оболочки производится по аналогии с любым другим приложением для ОС Android. Скачиваем файл lada_vesta_1.1.apk на USB-флешку или же сразу на магнитолу путем открытия данного сайта. Затем идем в меню всех приложений:
И находим файловый менеджер:
Открываем программу под названием Файлы. Находим с её помощью заранее скачанный файл lada_vesta_1.1.apk и нажатием по нему производим установку.
Если всё сделано правильно, в меню приложений появится Vesta Info. Открываем и убеждаемся в работоспособности. Удачи!
Проводка CAN на младших комплектациях Lada Vesta
Есть три способа подключиться к CAN-шине автомобиля в случаях, когда она не выведена на магнитолу.
 Диагностический разъем ODB2
Диагностический разъем ODB2- Черный разъем блока BCM
- Разъем к приборной панели автомобиля
 Диагностический разъем ODB2
Диагностический разъем ODB2 Черный разъем блока BCM
Черный разъем блока BCM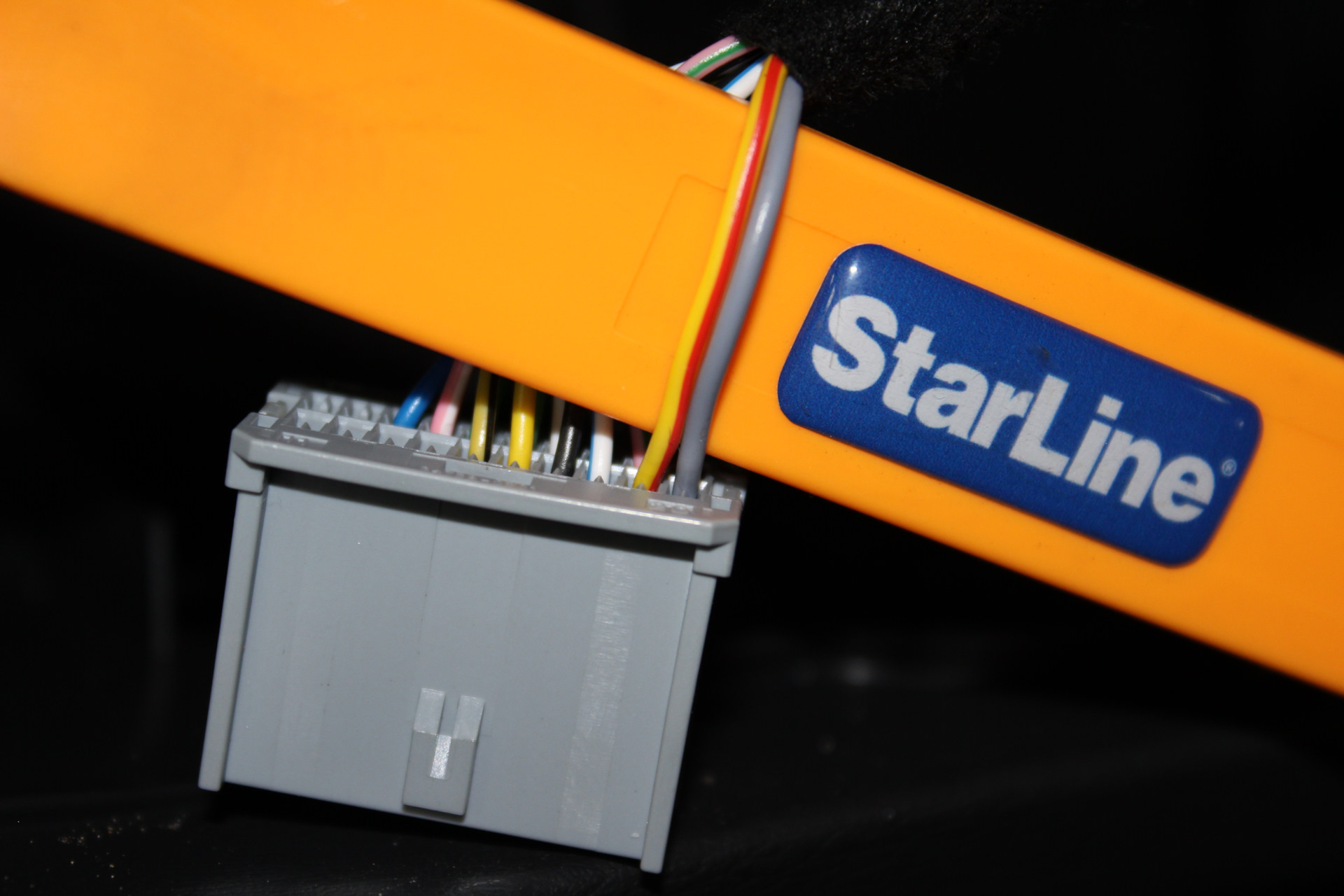 Разъем к приборной панели автомобиля
Разъем к приборной панели автомобиляРаспиновка подключения для каждого из них:
Далее дело за малым. Найти соответствующие выхода на колодке от магнитолы Teyes и простым “врезанием” подключить её к шине автомобиля.
Настройка CAN-BUS декодера под Lada Vesta
Перед настройками не забываем обновить программное обеспечение для работы с CAN-BUS коробочками на магнитолах Teyes.
Для версии 1.0 выставляем такие настройки:
Ну а для версии 1.1, соответственно, следующие:
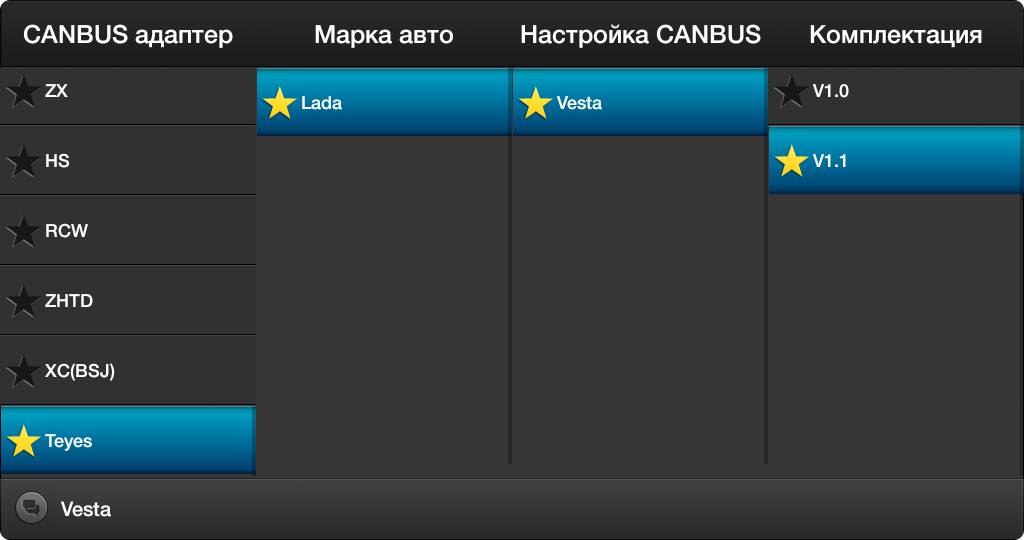
О том, как изменять настройки CAN-BUS адаптеров на магнитолах Teyes, а так же про настройку кнопок руля можно прочитать в данной инструкции.
Источник
Доработка магнитолы Android при помощи модуля CAN-BUS

Многие владельцы Lada Vesta и Lada XRAY отказались от штатного головного устройства в пользу магнитолы на Android. Если Ваша магнитола имеет процессор RockChip (PX3/5/6) или SC9853 ( Teyes ) , тогда не упустите возможность установить модуль CanBus3. Это устройство позволит расширить функциональность вашей мультимедийной системы. Аналогичное устройство выпустили и для Lada Granta.

Описание. Адаптер CANBUS2 подключается к CAN шине автомобиля и связывает её с магнитолой на Android (используя приложение VestaXR). Это позволяет выводить на ее экран множество полезной информации.
- Отображение параметров: скорости, оборотов, температуры двигателя, температуры снаружи, среднего расхода, общего пробега, напряжения в сети, количество израсходованного топлива, остаток пути на топливе, данных климатической системы (для авто с климатом), включенного ручника, низкого заряда, низкого давления масла, непристегнутого ремня пассажира и водителя, неисправности AirBag;
- Траектория парковки (Динамические парковочные линии);
- Отображение ошибок в ЭБУ, с расшифровкой, возможность удаления ошибки;
- Эмуляция местоположения на основе данных блока ГЛОНАСС, при отсутствии антенны GPS;
- Предупреждение при превышении температуры двигателя (больше 105 градусов);
- Автоматическое затемнение экрана при включении ближнего света;
- Список запчастей для Весты. Более 400 позиций;
- Перечень реле и предохранителей в автомобиле с картинками;
- Просмотр сигналов в CAN шине;
- Сохранение сигналов CAN шины в формате CanHacker для дальнейшего анализа;
- Отправка запросов в CAN шину;
- Функция Trip;
- Функция дневной Trip (индикация суточного пробега);
- Индикация дверей, капота и багажника;
- Цветовая индикация изменения сигнала на вкладке Тест при анализе сигналов;
- Отображение работы вентилятора двигателя;
- Отображение работы кондиционера для машин без климат-контроля;
- Система TPMS, предупреждение о спущенном колесе;
- Отображение температуры двигателя в статусбаре;
- Отображение числа ошибок ЭБУ в статусбаре;
- Отображение остатка топлива в статусбаре;
- Иконка датчика омывайки (если он установлен);
- Отображение мгновенного расхода топлива;
- Индикация работы поворотников;
- Включение вентилятора по заданной температуре двигателя;
- Включение сигнальной лампы на панели приборов при обнаружении любой ошибки;
- Отображение даты продажи автомобиля от дилера;
- Отображение VIN автомобиля;
- Ручная проверка ошибок;
- Сброс ЭБУ с инициализацией;
- Устранение ошибок;
- и многое другое.









Есть возможность менять параменты в ЭБУ:
- отключение и включение системы помощи при подъёме в горку HSA
- отключение и включение звукового сигнала при штатной сигнализации
- отключение и включение помощи ПТФ при повороте
- отключение и включение заднего дворника при движении задним ходом
- настройка климатических зон
Подробней в презентации: Чтобы скачать файлы нужно авторизироваться на сайте
Разработкой и продажей модуля CANBUS занимается питерская компания CMGAISD, которая отправляет адаптер в регионы и предоставляет гарантию на товар.
Источник