- Самодельный гравировщик лазерный: как сделать гравер ЧПУ на Ардуино своими руками
- Лазерный модуль с проводами и стеклянной линзой
- Шаг 1
- Шаг 2
- Шаг 3
- Шаг 4
- Шаг 5
- Шаг 6
- Шаг 7
- Шаг 8
- Шаг 9
- Шаг 10
- Шаг 11
- Шаг 12
- Шаг 13
- Шаг 14
- Шаг 15
- Шаг 16
- Шаг 17
- Шаг 18
- Шаг 19
- Шаг 20
- Шаг 21
- Шаг 22
- Шаг 23
- Шаг 24
- Шаг 25
- Шаг 26
- Самостоятельное проектирование и сборка лазерного гравера больших размеров
Самодельный гравировщик лазерный: как сделать гравер ЧПУ на Ардуино своими руками
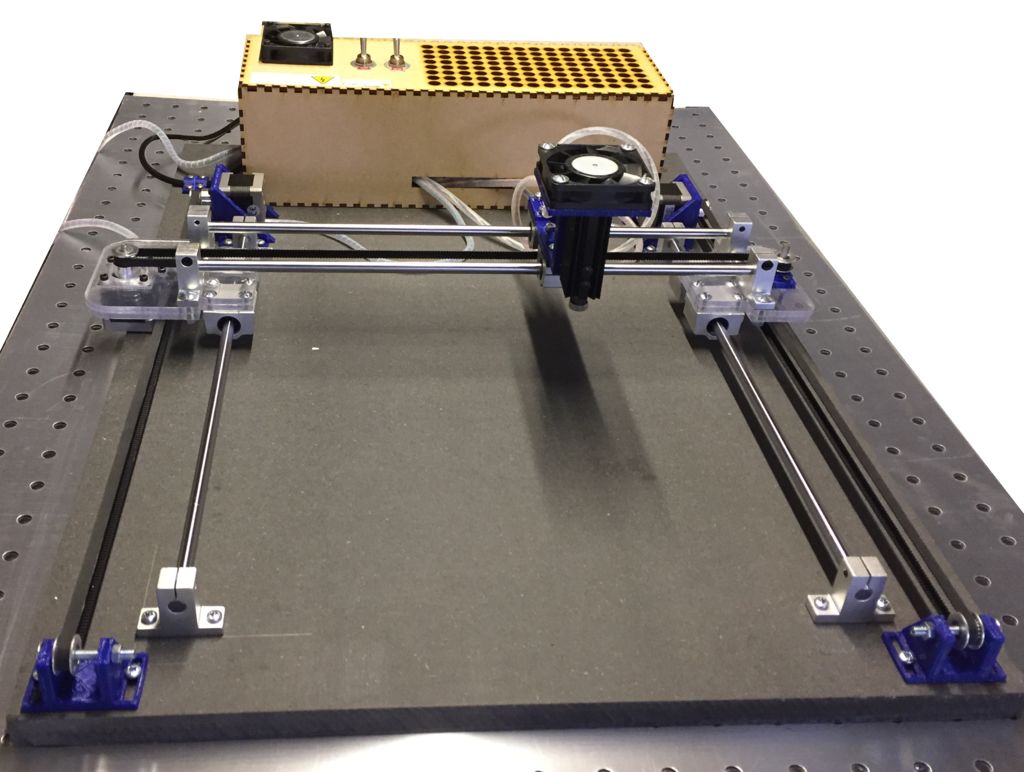
Я видел в сети много самодельных лазерных граверов и инструкций по их сборке, и захотел собрать свою собственную версию.
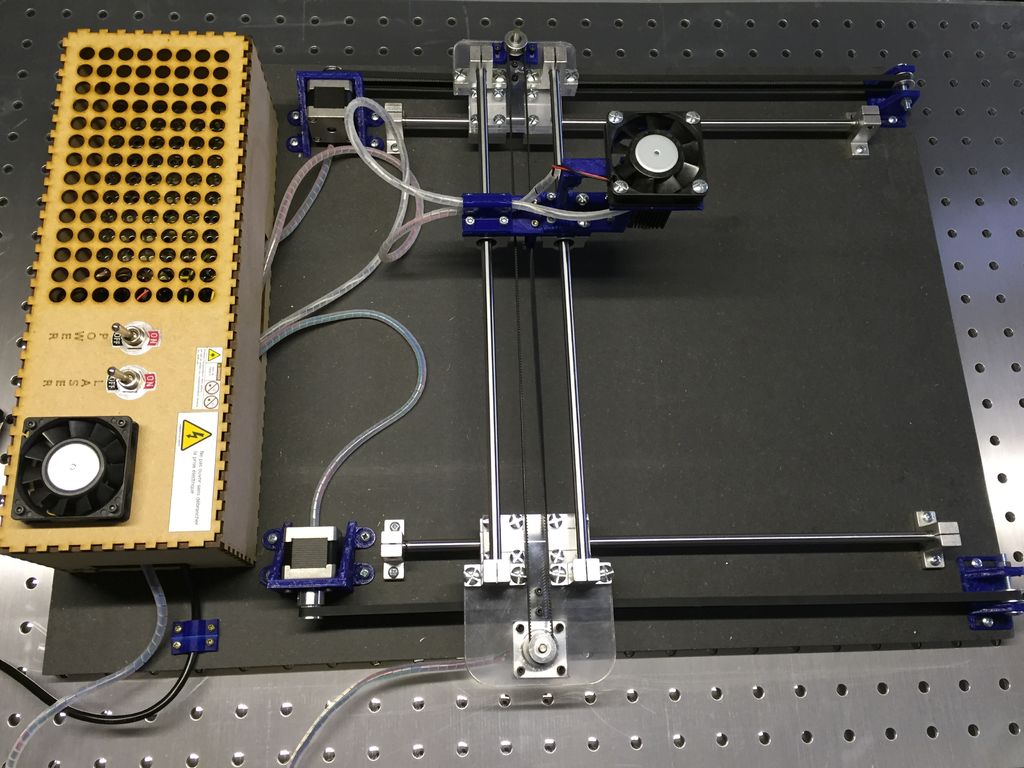
После многочисленных попыток, у меня получился лазерный гравер на Ардуино своими руками, надежный и приятный в использовании.
Максимальная мощность – 3 Вт, но обычно я работаю на 2 Вт, чтобы поберечь лазерный диод. Честно говоря, разница между 2 и 3 Вт практически не заметна.
Лазерный модуль с проводами и стеклянной линзой
В этой статье я покажу, что можно собрать, обходясь минимумом материалов и практически не тратясь.
Думаю, вы уже знакомы с GRBL (программа открытого проекта для Arduino, предназначенная для фрезерных — граверных станков и лазерных станков), с редактором Inkscape и с тем, как создавать файлы Gcode.
Я не буду подробно расписывать электронику, в этой статье не будет всеобъемлющей информации, возможно, в будущем я раскрою какие-то моменты более подробно — я вполне допускаю, что дал недостаточно информации, чтобы собрать гравировщик ЧПУ легко с первого раза.
- STL-файлы, готовые для распечатки
- GRBL-программу для моей конфигурации
- плагин лазерного гравировщика, который я использую для Inkscape
- файл с подсчетом стоимости деталей. Почти все их можно заказать на Aliexpress
- файлы EAGLE для создания модуля с мосфет-диодом для индикации включения-выключения гравировщика
Для печати плат рекомендую сервис OSH Park.
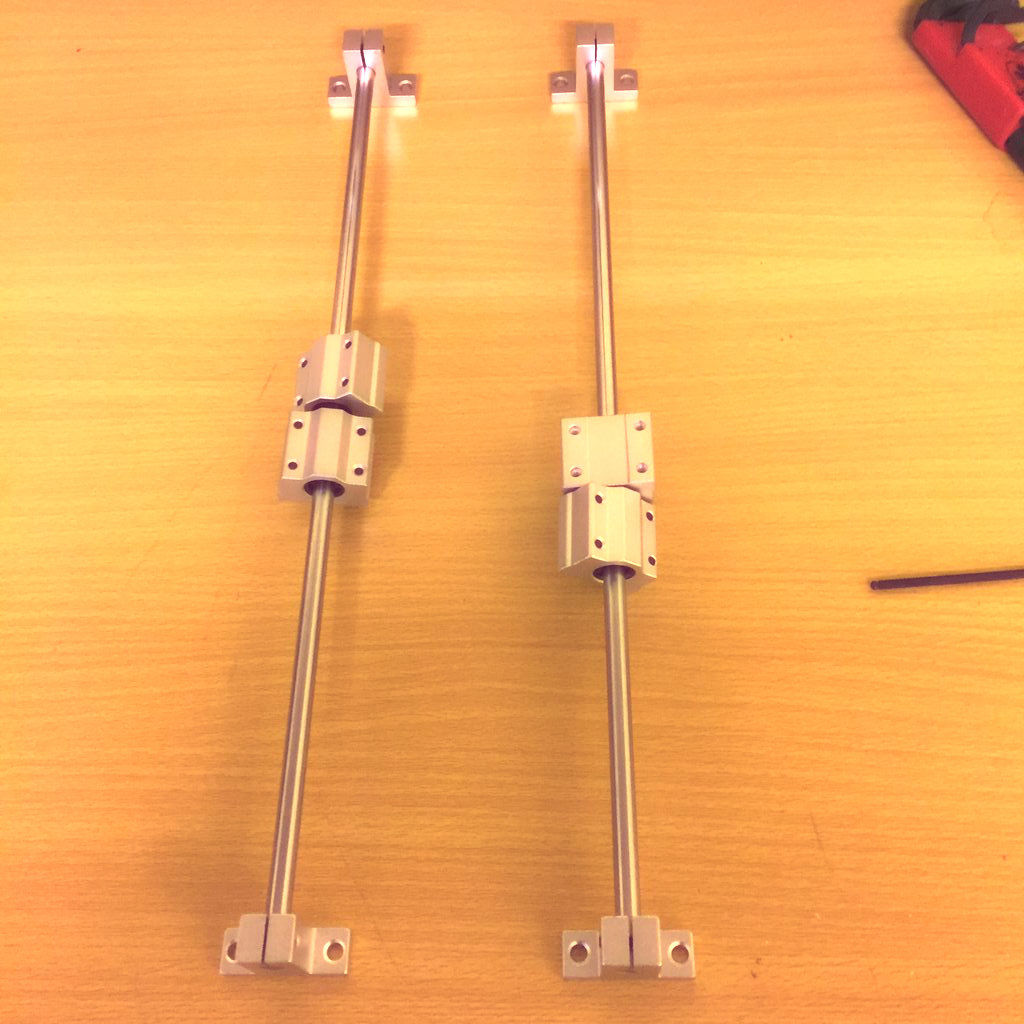
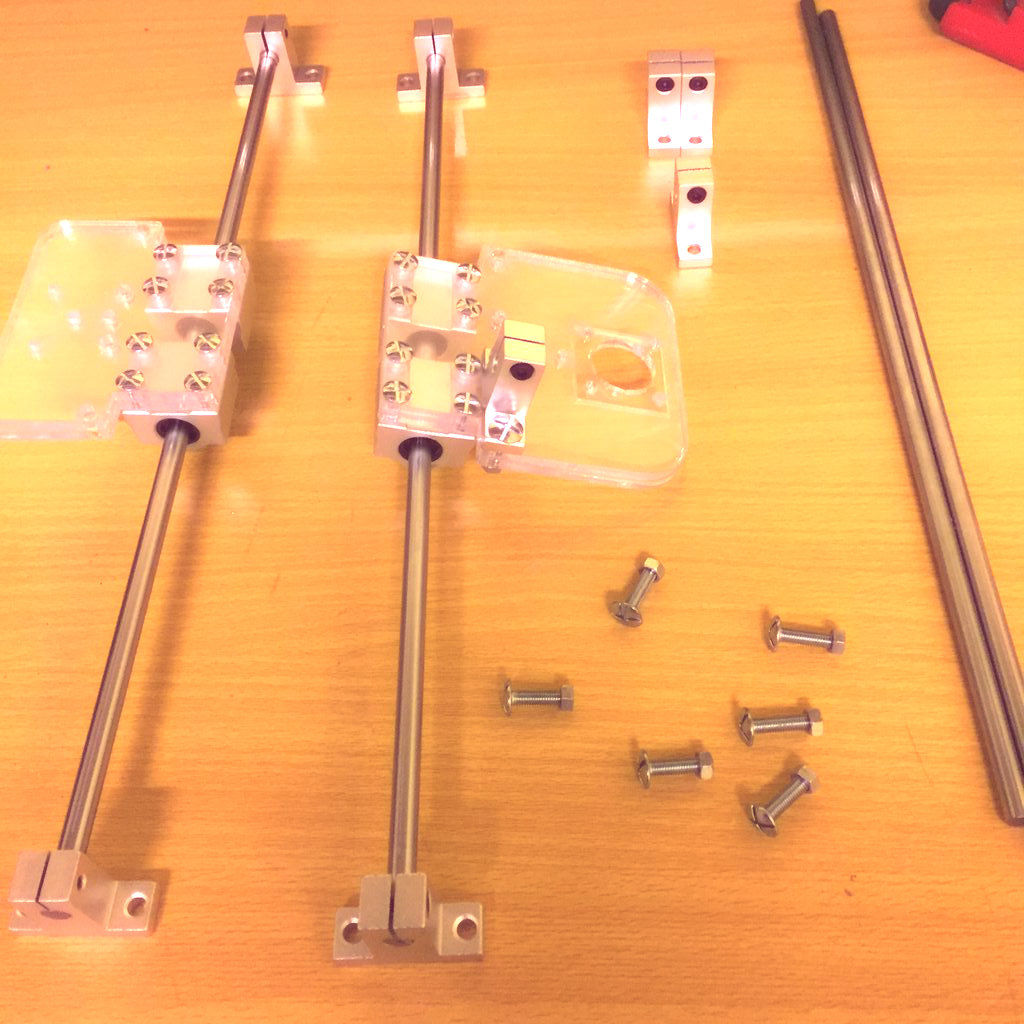
Шаг 1

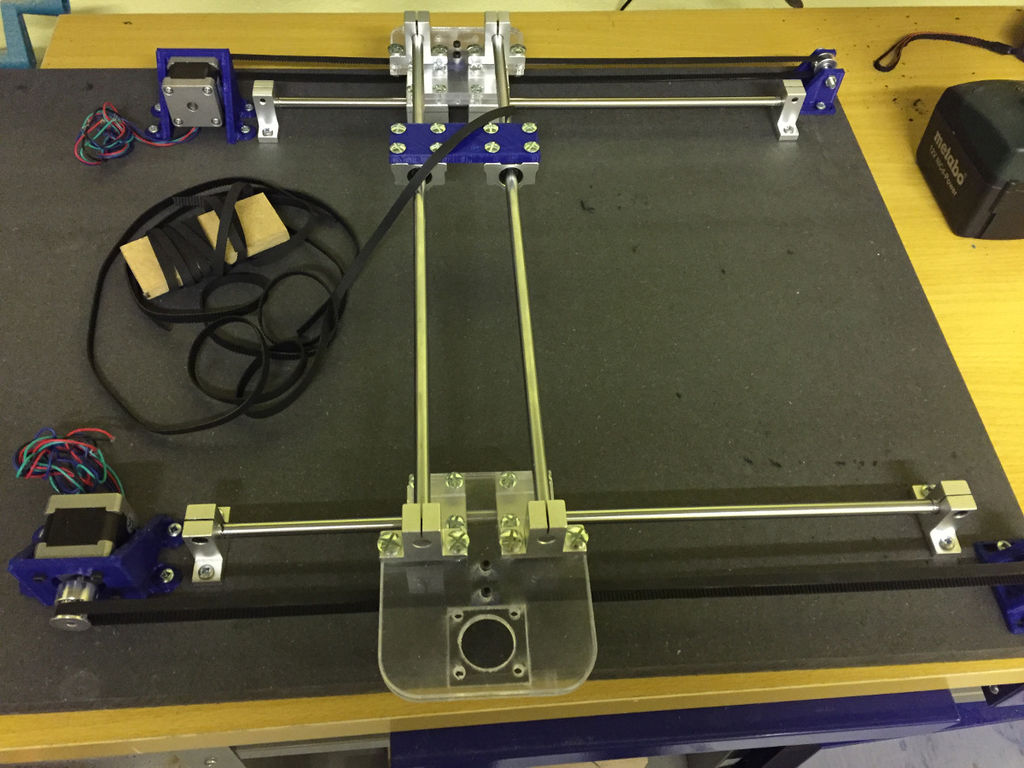
Берем два линейных вала и четыре суппорта для них.
Шаг 2

- Закрепляем валы в двух суппортах
- Берем четыре закрытых линейных подшипника в корпусе
Шаг 3
Надеваем на валы по два подшипника и закрепляем валы в оставшихся двух суппортах
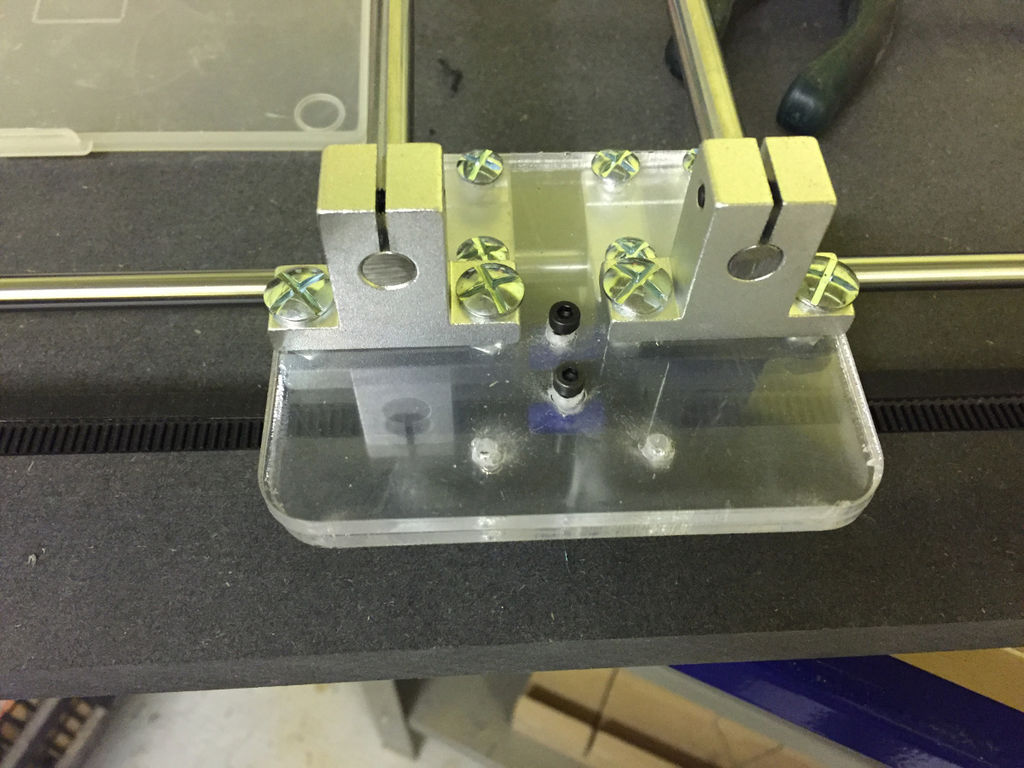
Шаг 4
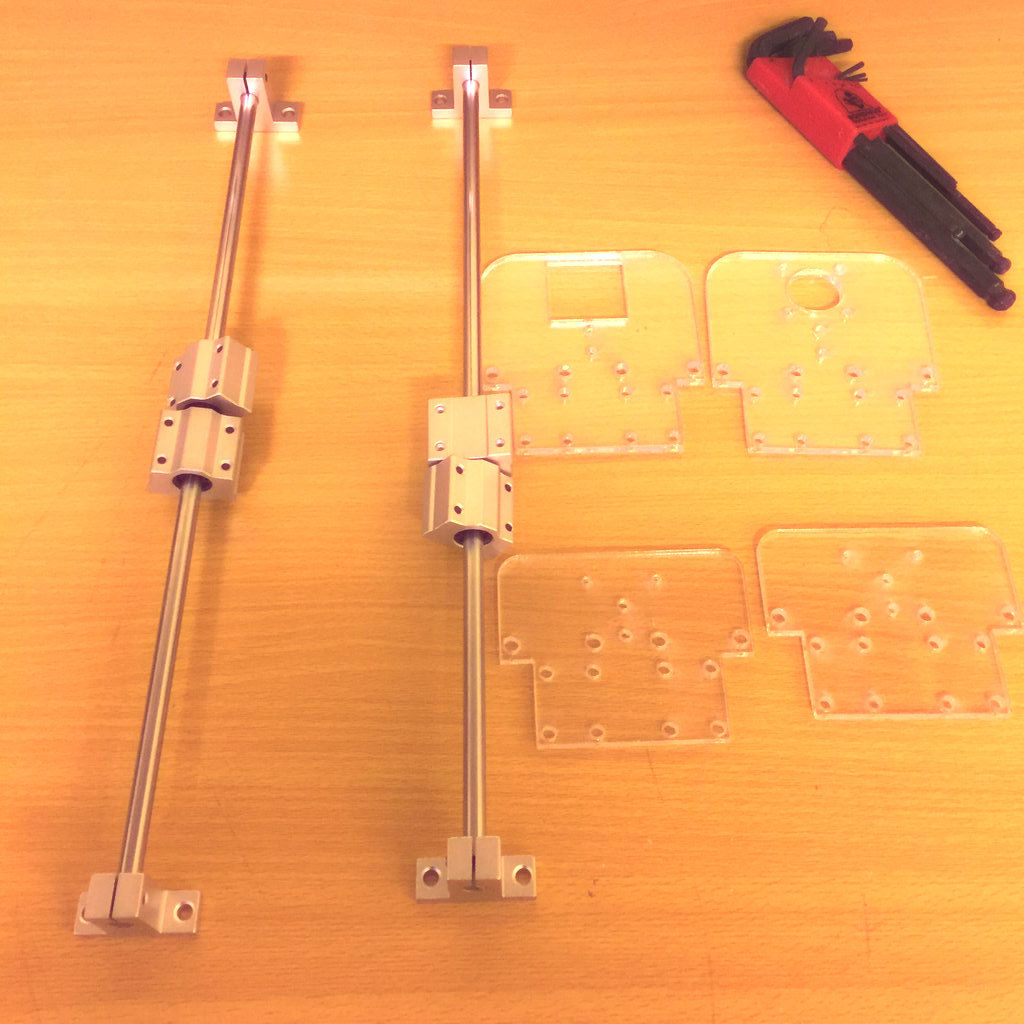
Подготавливаем пластины для лазерного резака (держатели каретки).
Шаг 5
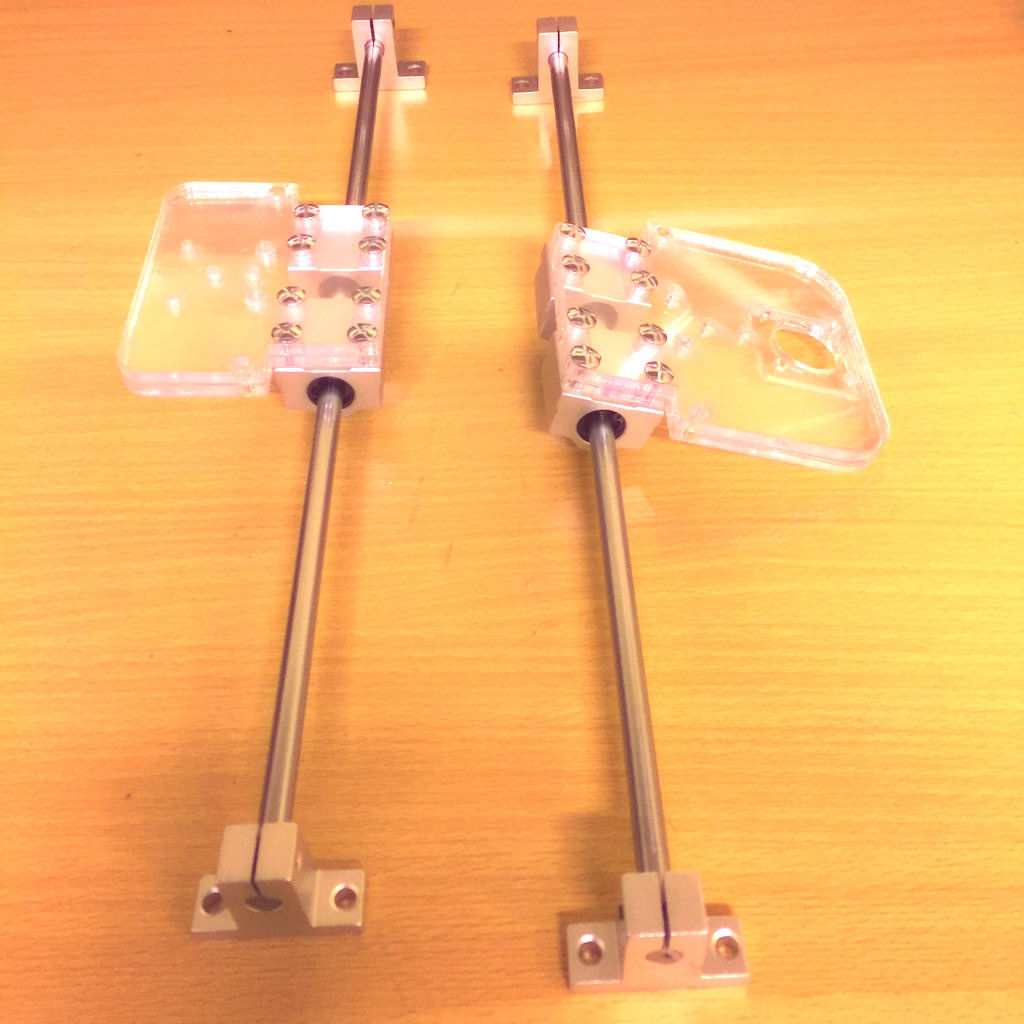
Закрепляем пластины на подшипники.
Используем винты М4 16мм.
Шаг 6

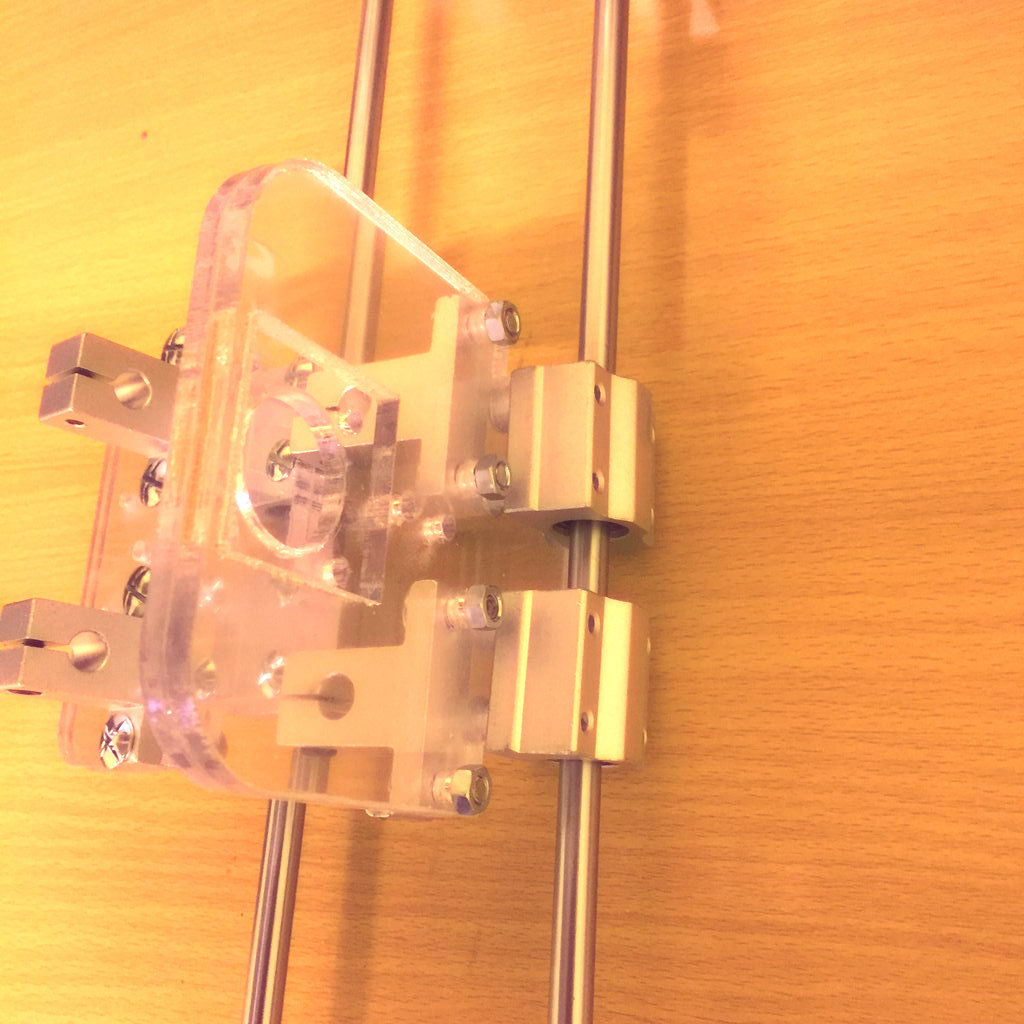
Берем еще два линейных вала, суппорты к ним, винты М5 20 мм с гайками.
Монтируем суппорты на держатели каретки.
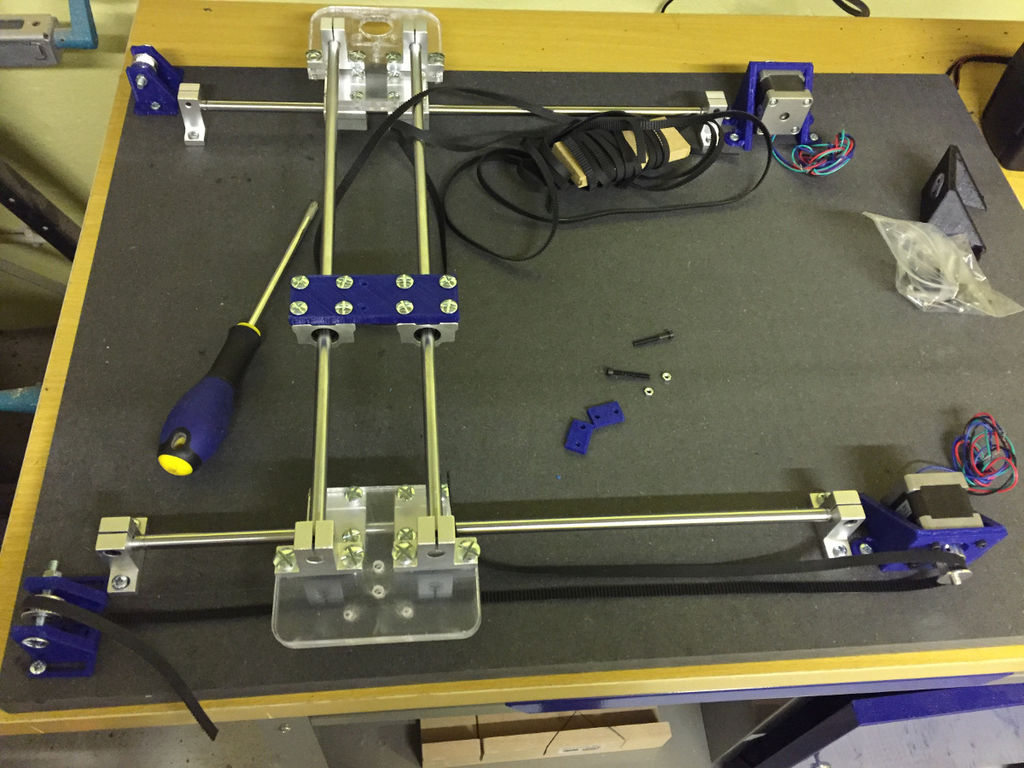
Шаг 7
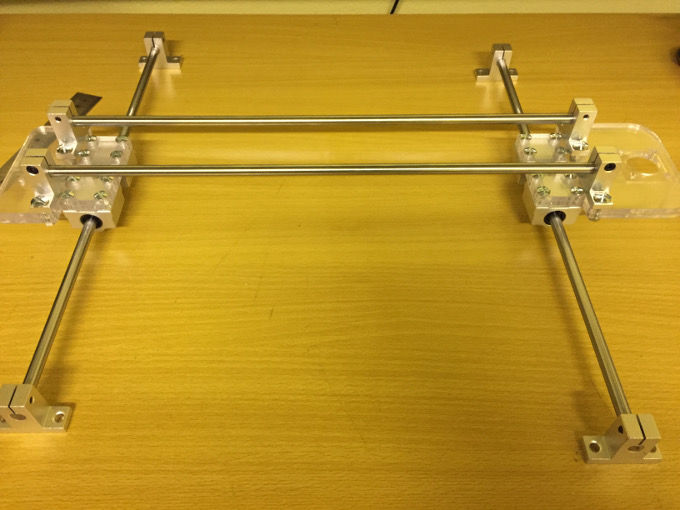
Монтируем линейные валы в суппорты на держателях, это ось Х, и проверяем ход подшипников по нижним валам, это ось Y.
Подготовьте два закрытых подшипника, 8 винтов М4 16 мм и каретку, напечатанную на 3Д принтере.
Разберите ось Х, наденьте на линейные валы подшипники и каретку, и закрепите суппорты снова.
Шаг 8
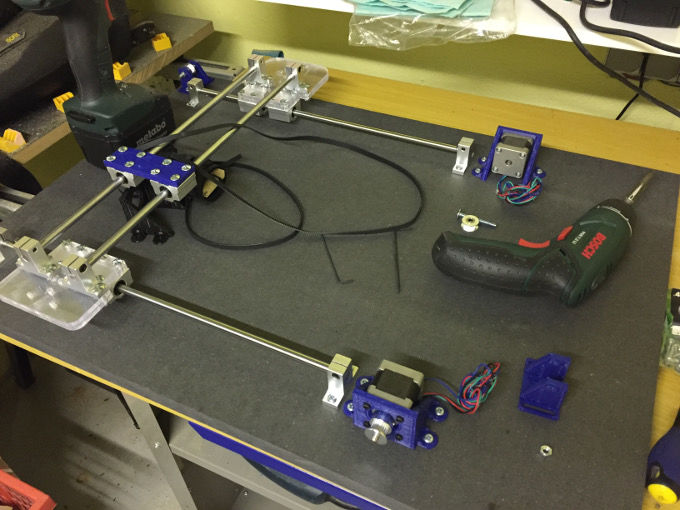
Теперь монтируем конструкцию на деревянную плиту. Движения должны быть точными и уверенными.
К этому этапу, к сожалению, не сделано фотографий.
Шаг 9
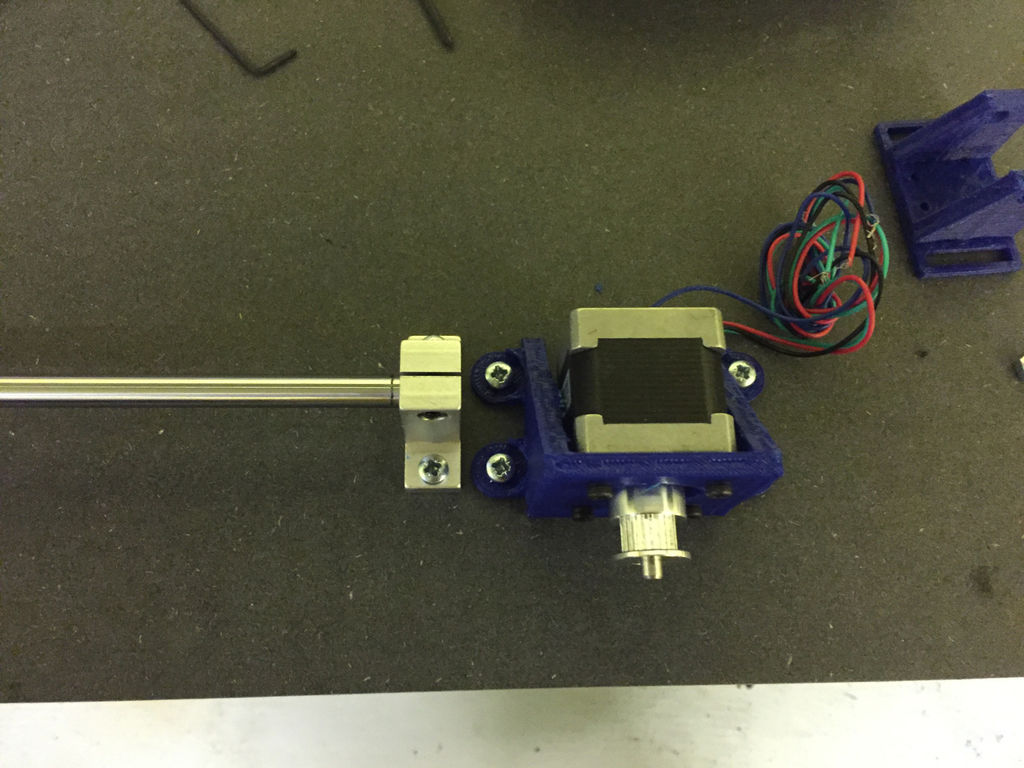
Закрепляем два электродвигателя на оси Y креплениями, напечатанными на 3Д-принтере.
Для этого используйте винты М3 10мм.
Закрутите винты, убедившись, что они выставлены ровно.
Шаг 10
Ременная передача оси Y

Соберите натяжные механизмы и привинтите их на платформу (для этого возьмите винты 5 мм с гайками).
Шаг 11
Подготовьте крепления ремней и винты М3 25 мм.
Закрепляя ремни на оси Y будьте терпеливы, это достаточно сложная работа.
Шаг 12
Устанавливаем двигатель на ось Х
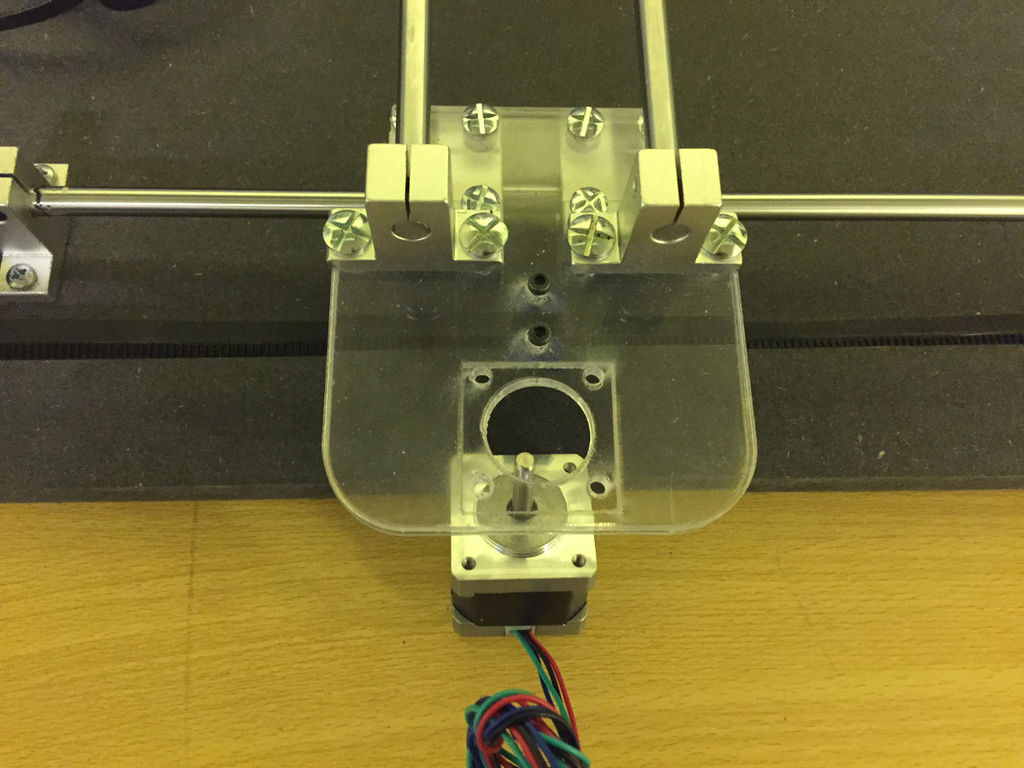
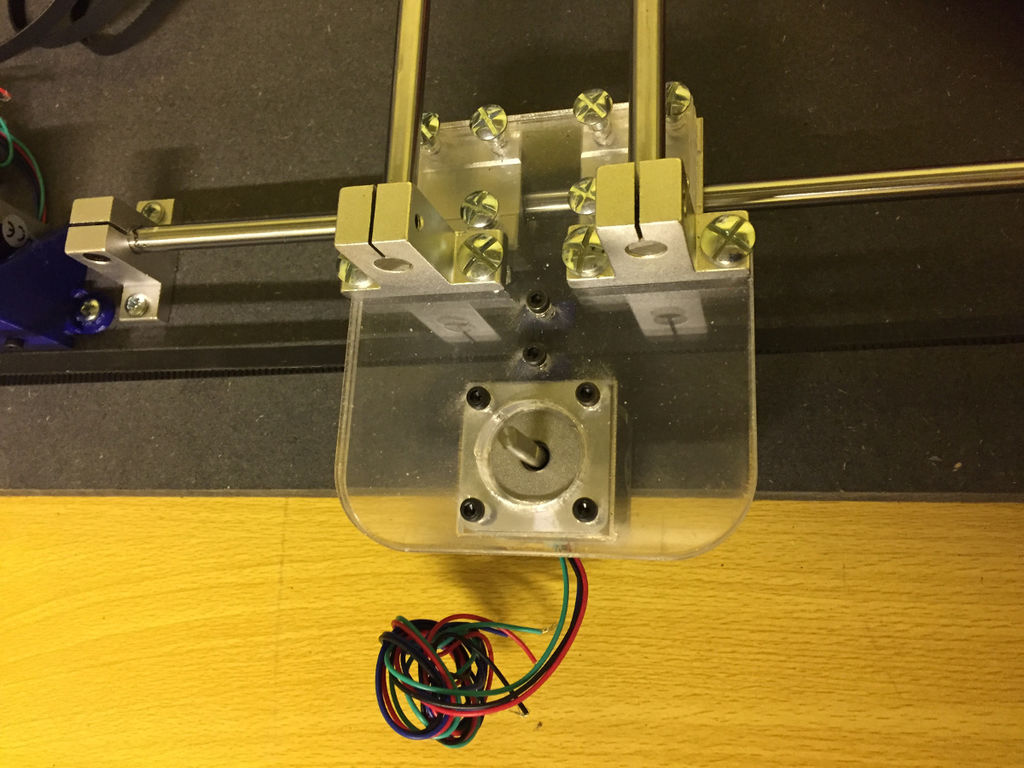
Вообще, это можно было сделать и раньше.
В нашем случае делаем следующее:
- немного раскрутите винты, чтобы приподнять каретку
- под кареткой установите двигатель
- привинтите его винтами М3
Шаг 13
Ременная передача на оси Х
В отверстие детали, напечатанной на 3Д-принтере, вставьте винт М4, пластик достаточно мягкий для этого.
Наденьте шкив на винт М4 и закрепите натяжной механизм на приборе.
К этому этапу снова не сделано фотографий.
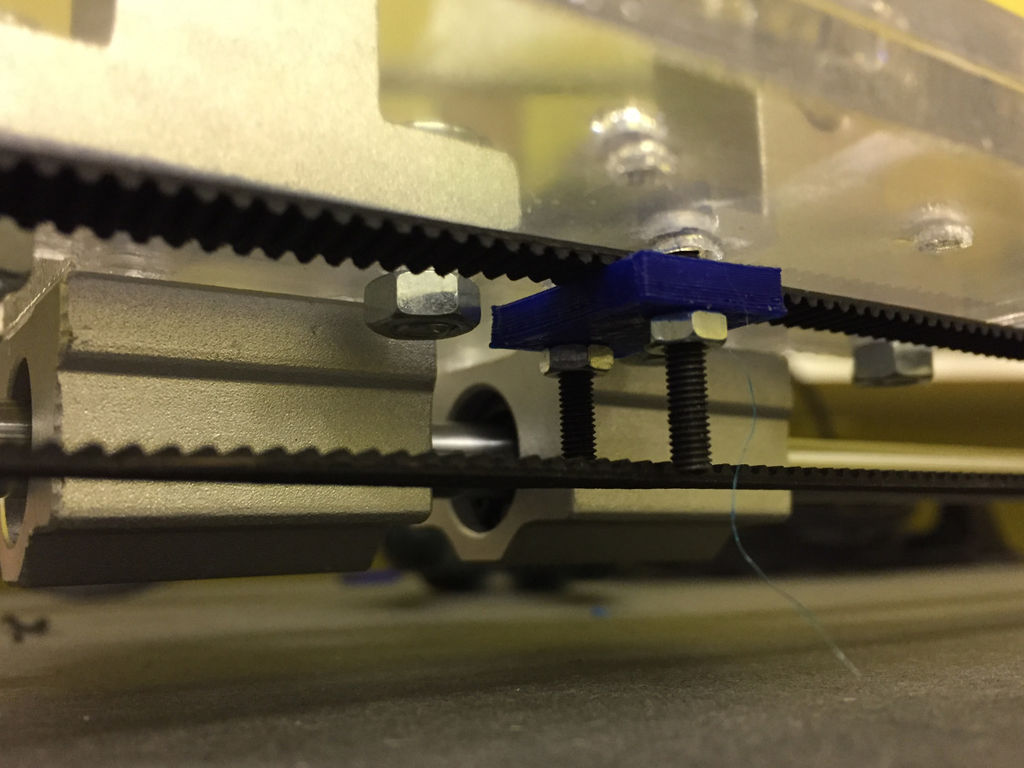
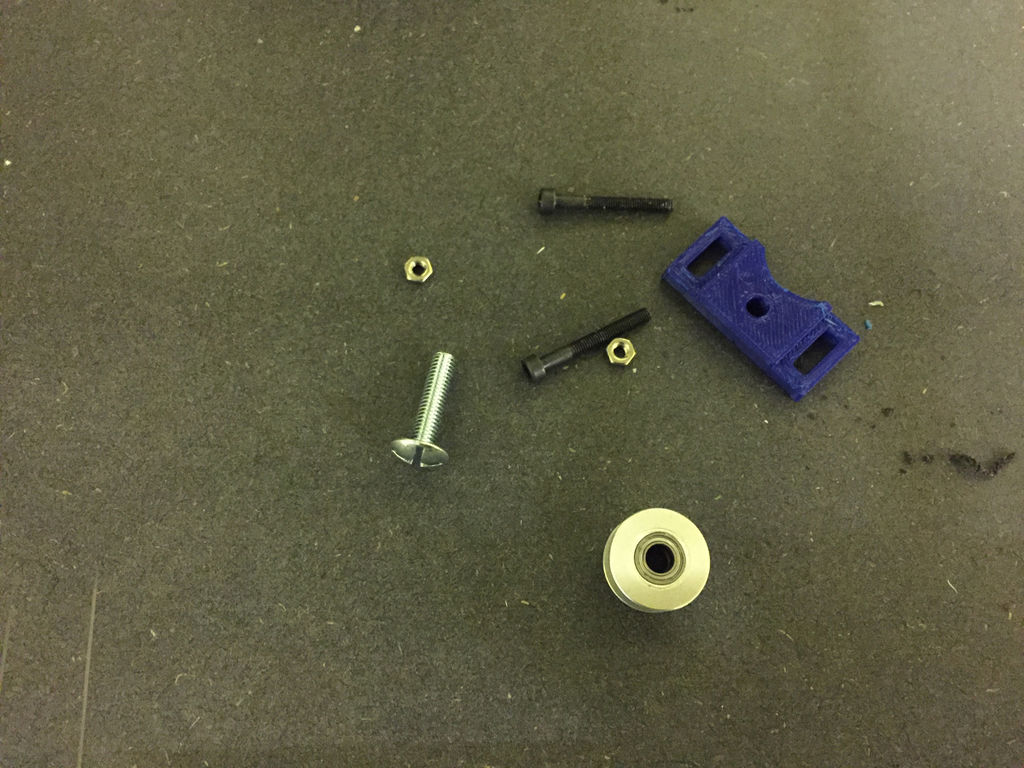
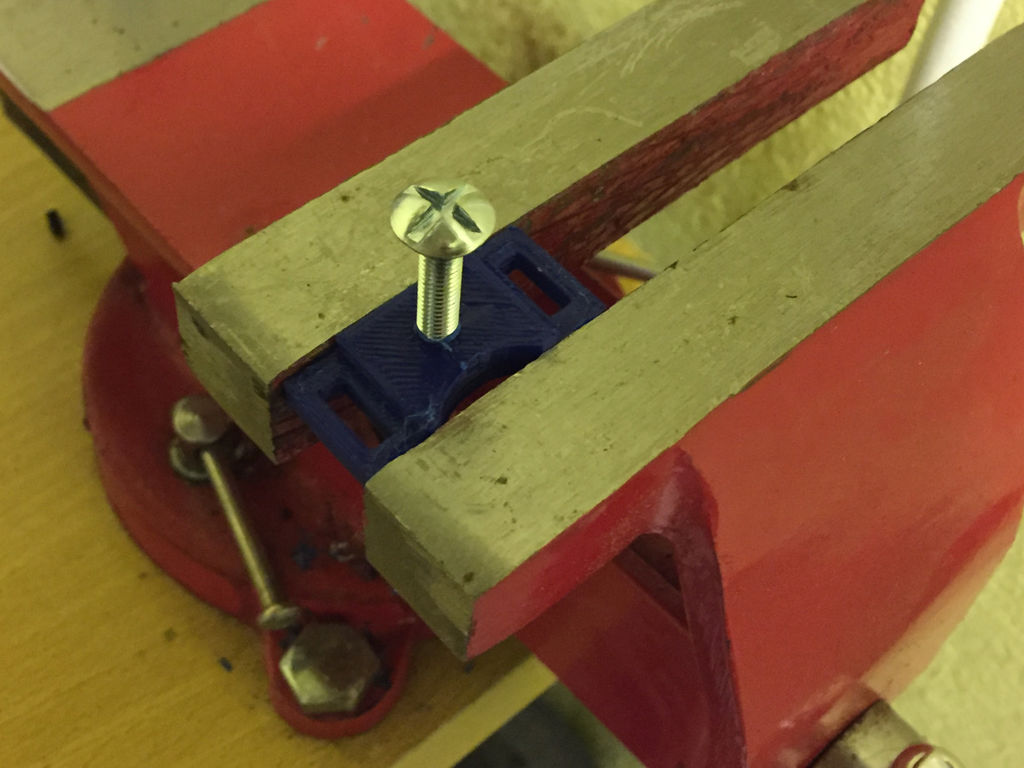
Шаг 14
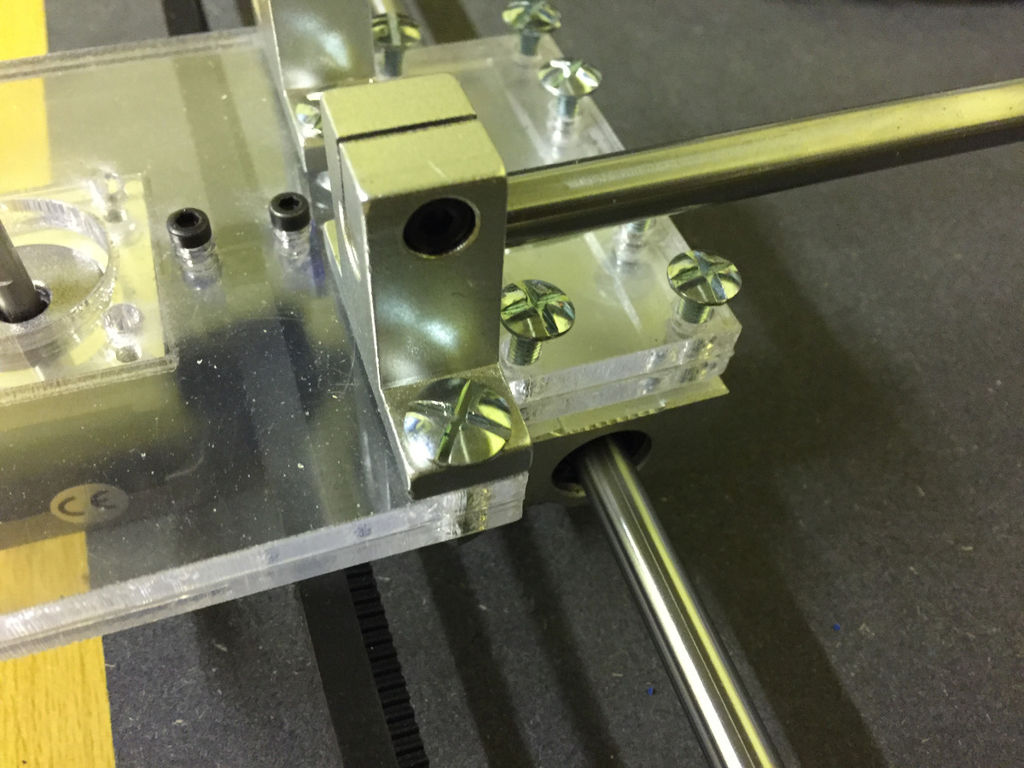
Держатели ремня на оси Х



- Подготовьте составные части для держателя ремня.
- Вставьте винты М3 в отверстия деталей, как показано на картинке.
- В оставшиеся 2 отверстия также вставьте винты (фото следующего шага).
- Установите держатели ремней на место.
Шаг 15


Шаг 16
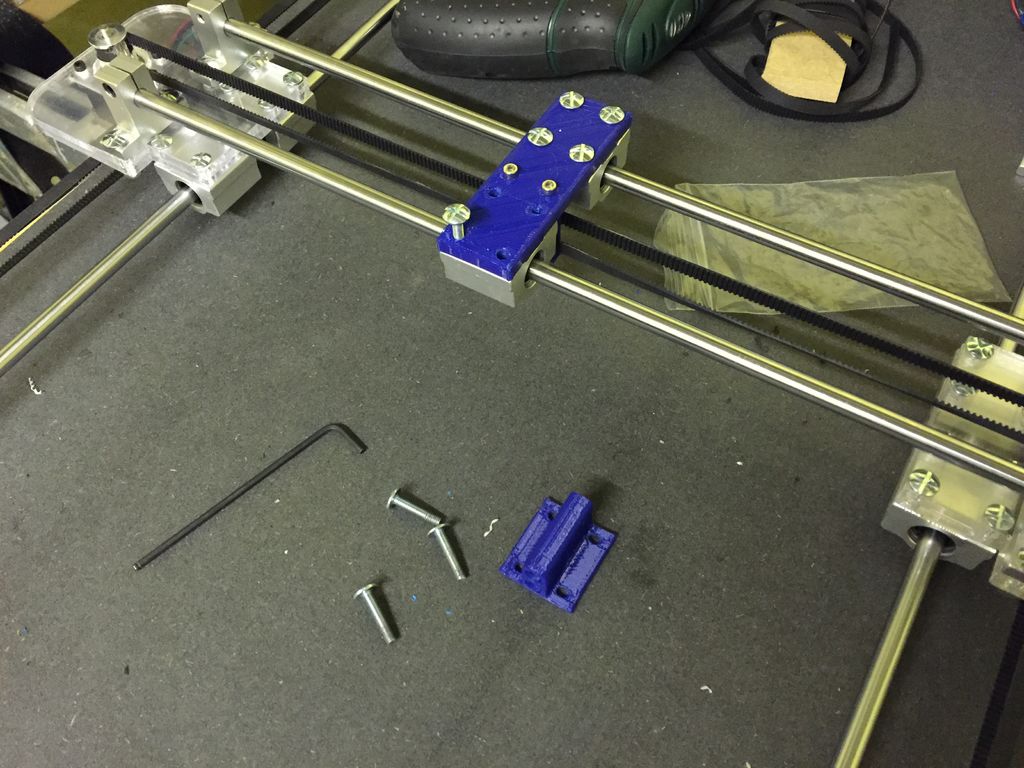

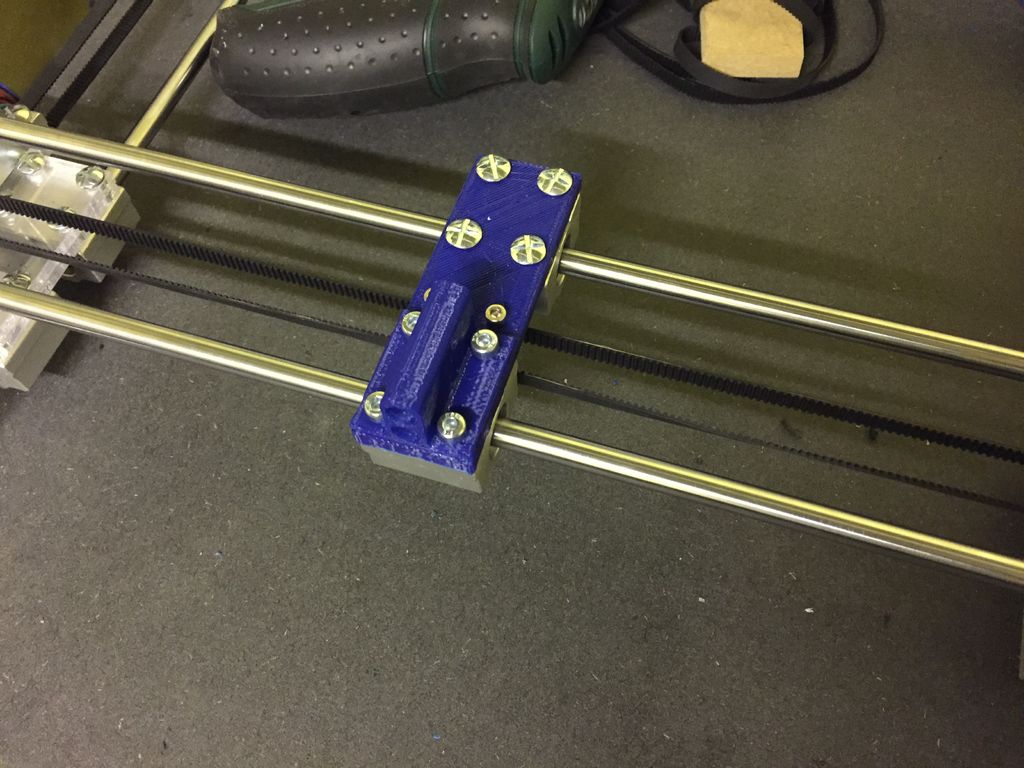
Установите держатель шнура.
Шаг 17
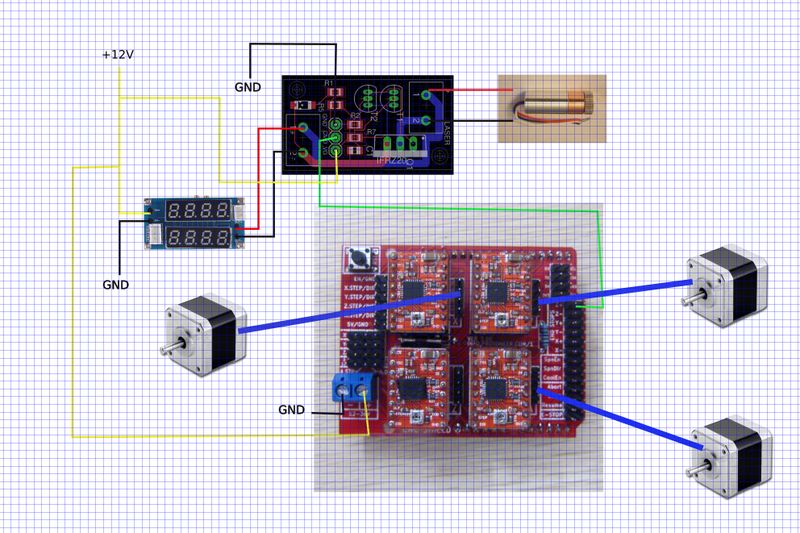
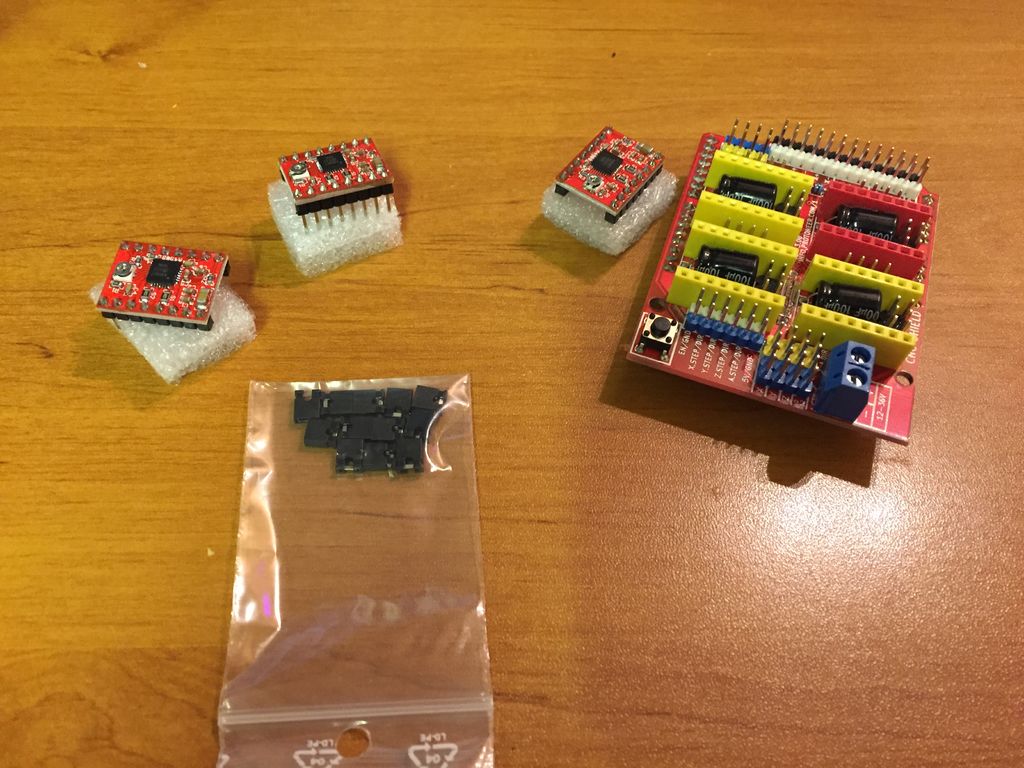
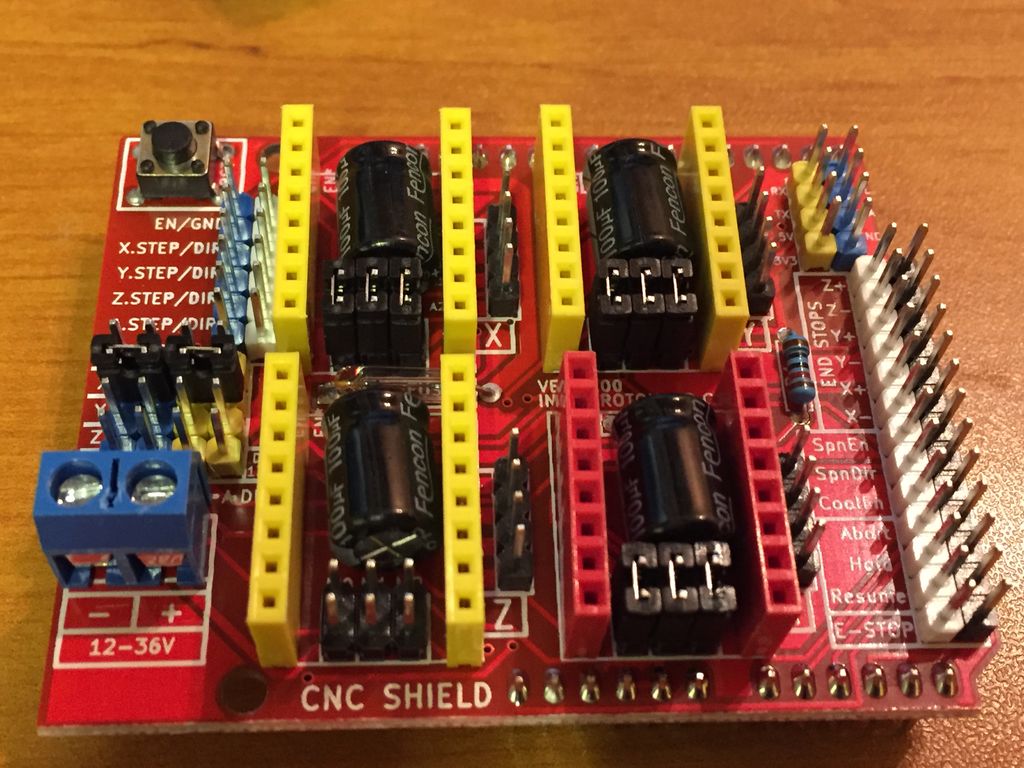
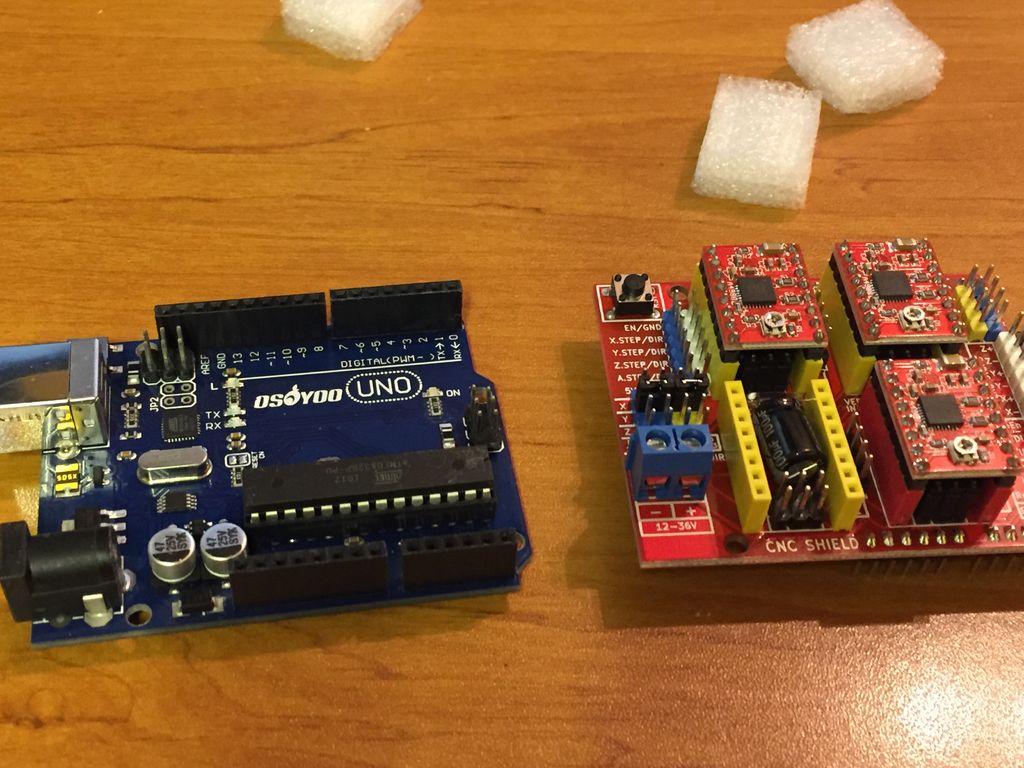
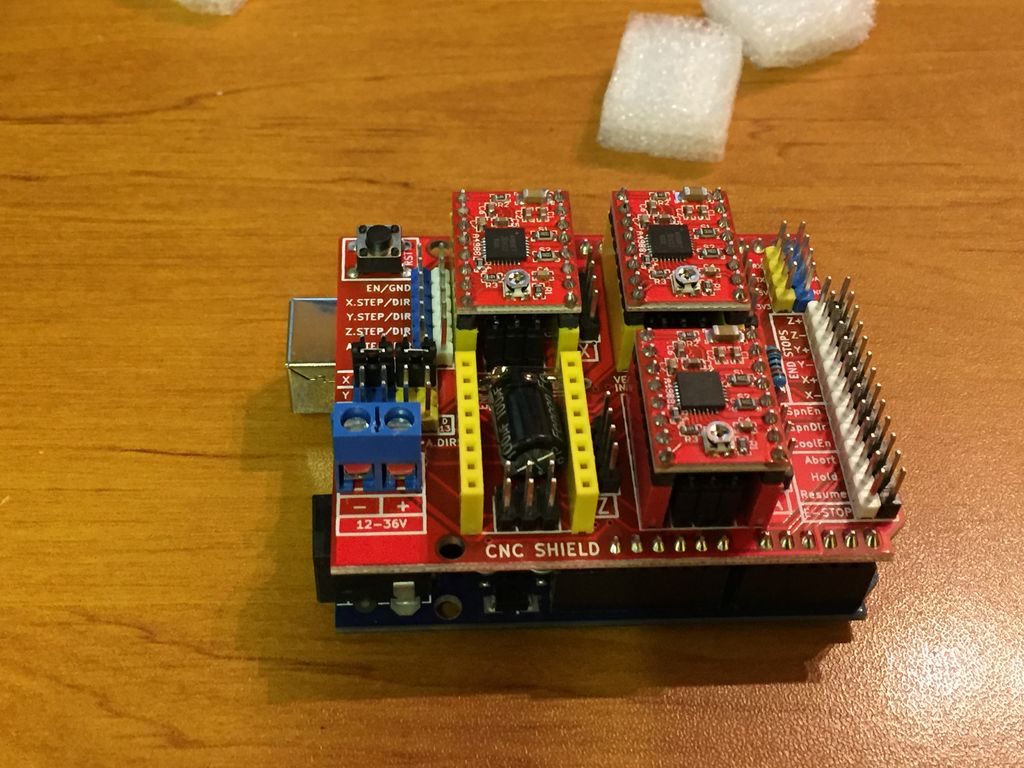
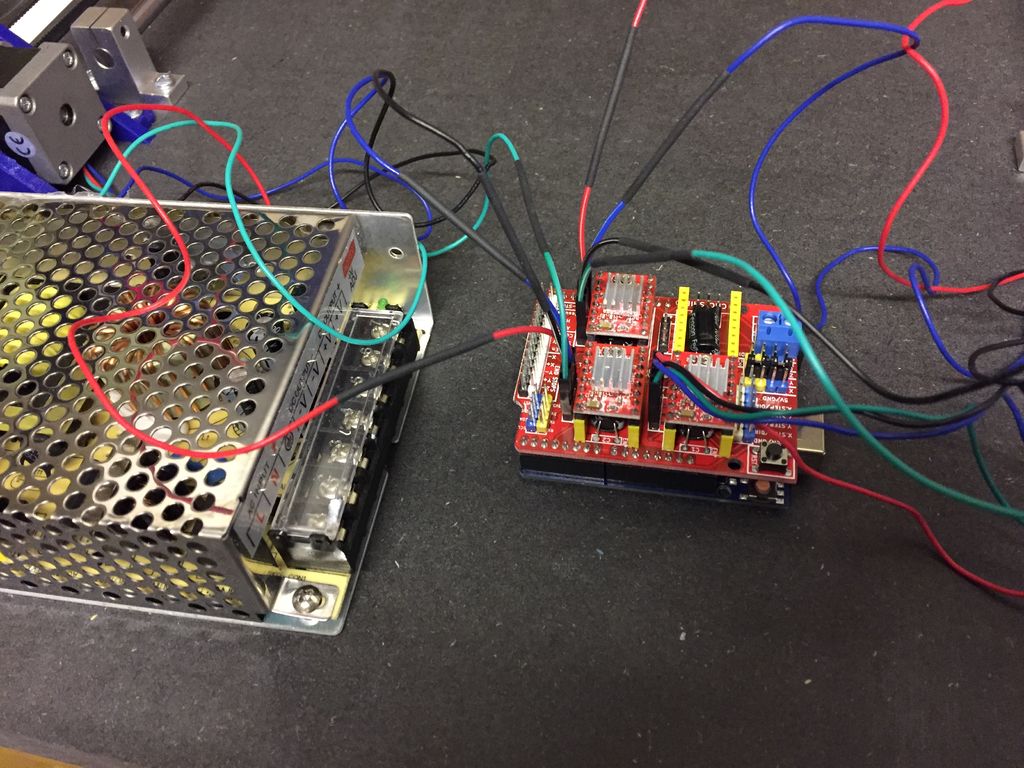
- 3 привода электродвигателя
- шилд CNC
- 11 перемычек (обычно идут в комплекте с шилдом)
- Плата Arduino
- установите перемычки так, как это показано на фотографии 2. Это позволит установить двигатели на микрошаг 16 и клонировать ось Y на А.
- подключите приводы к плате Arduino.
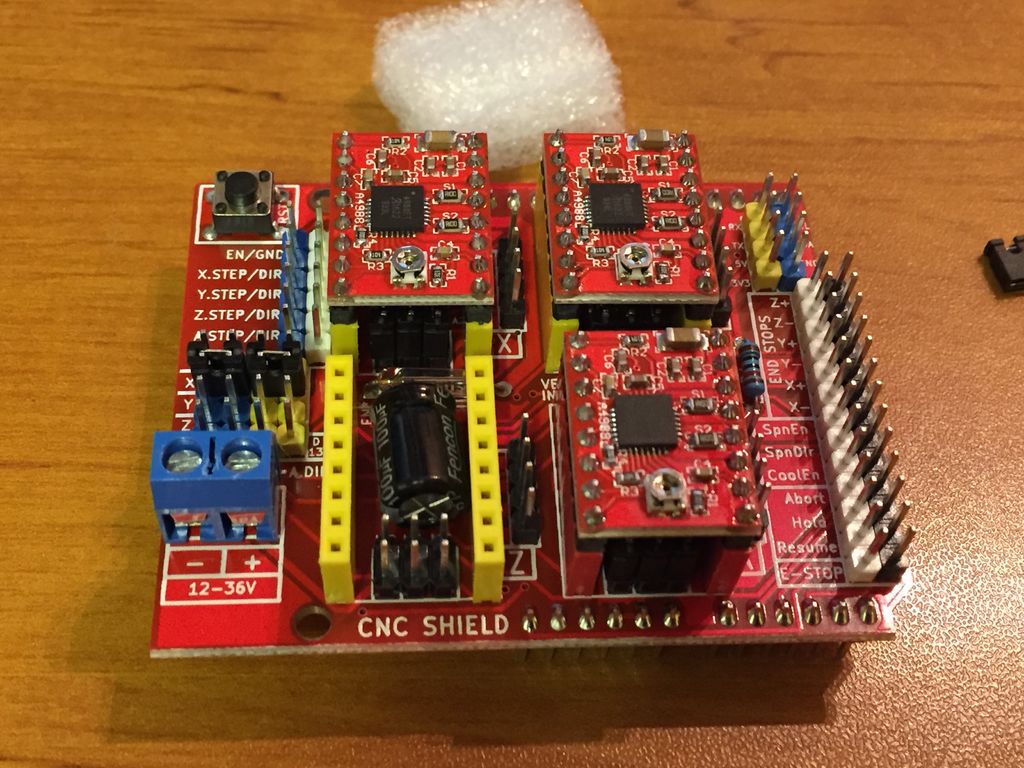
Шаг 18
Электроника: теплоотвод шагового двигателя
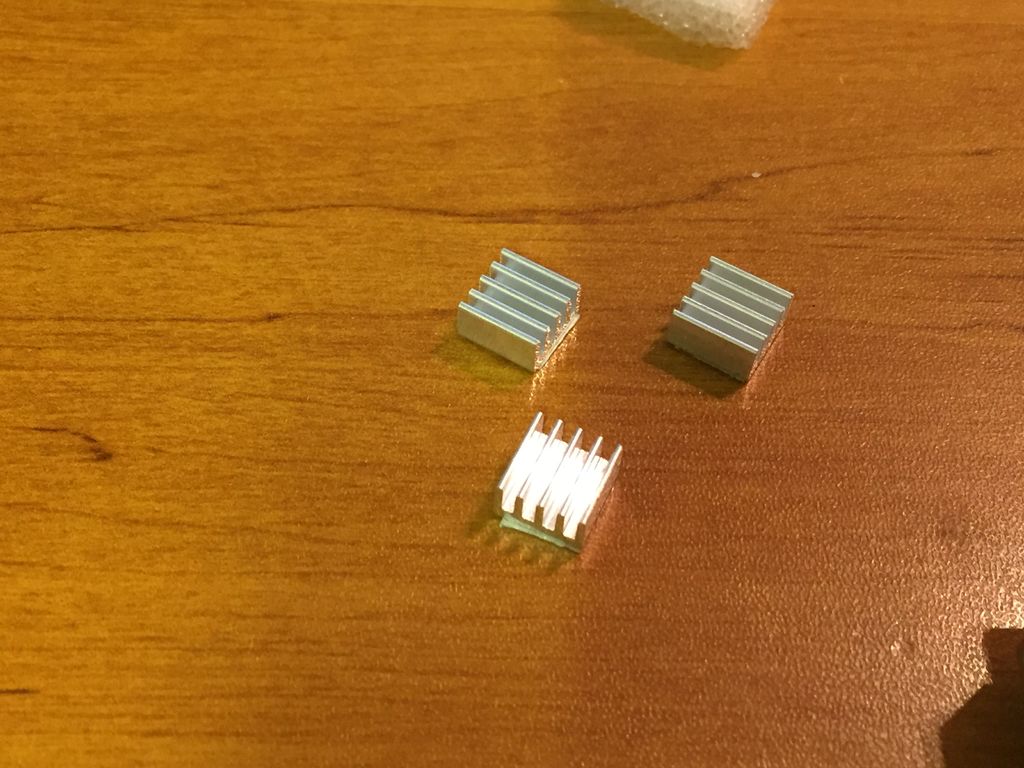
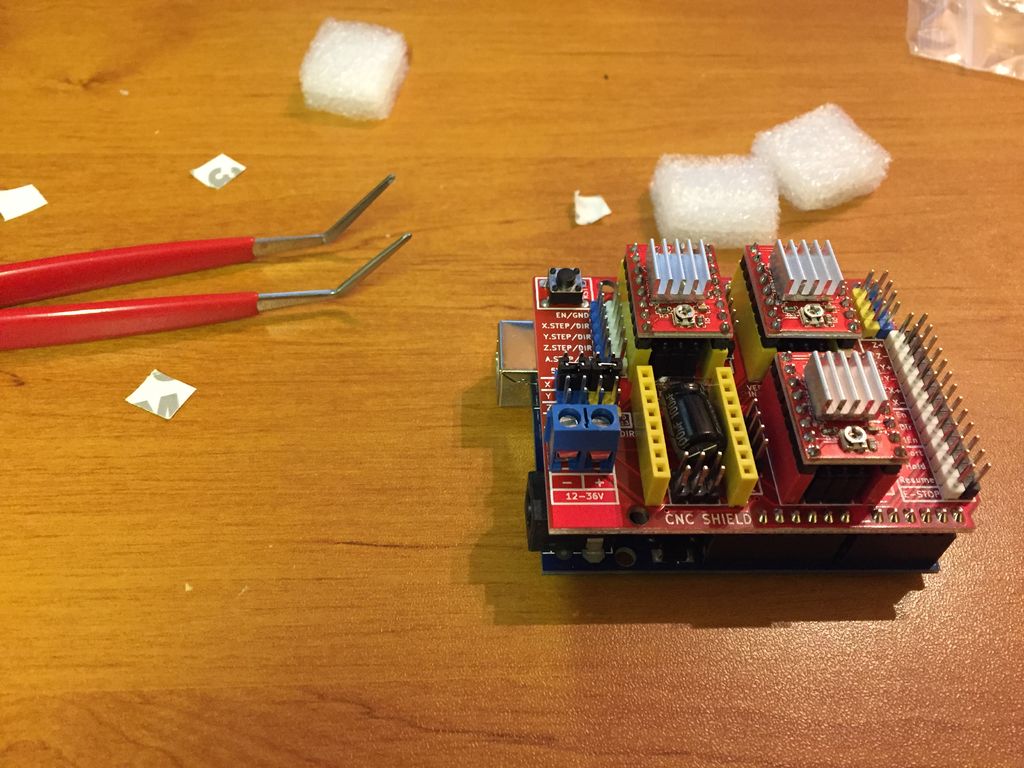
Вам нужен радиатор, без него двигатель будет пропускать шаги.
Шаг 19
Электроника: паяем коннекторы к проводам двигателей
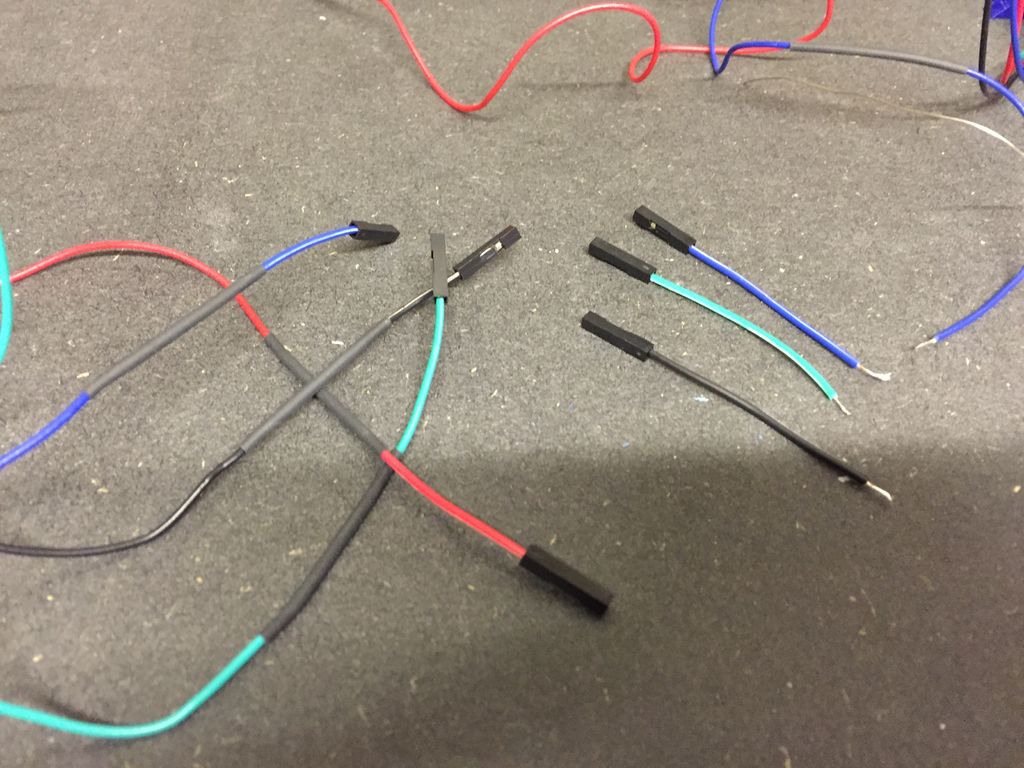
Можно купить готовые коннекторы и соединить двигатели с шилдом CNC, но нужно будет ждать доставку и это не так просто.
Я предпочитаю купить готовые коннекторы мама-мама, разрезать их на две части и спаять с шилдом…
Шаг 20
Электроника: пробный запуск
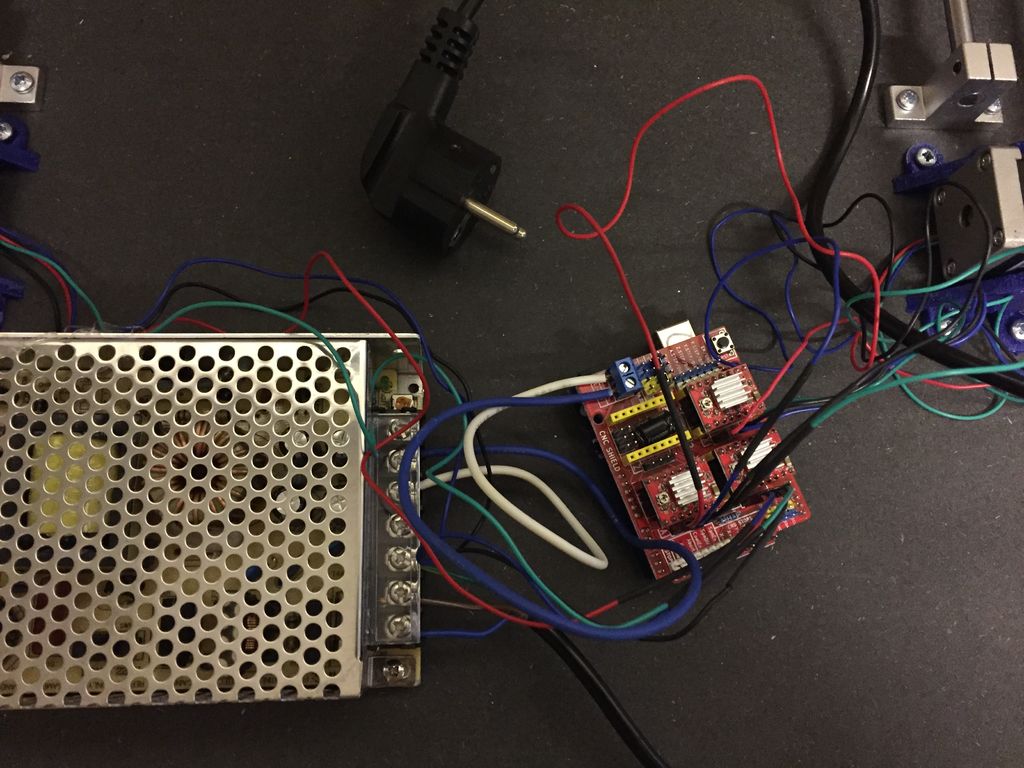
Пришло время провести испытание:
- подключите двигатели к шилду CNC
- включите питание
- загрузите GRBL на Arduino и заставьте механизм двигаться
Если механизм работает, пора приступать к следующему шагу.
Шаг 21
Устанавливаем крепление лазера
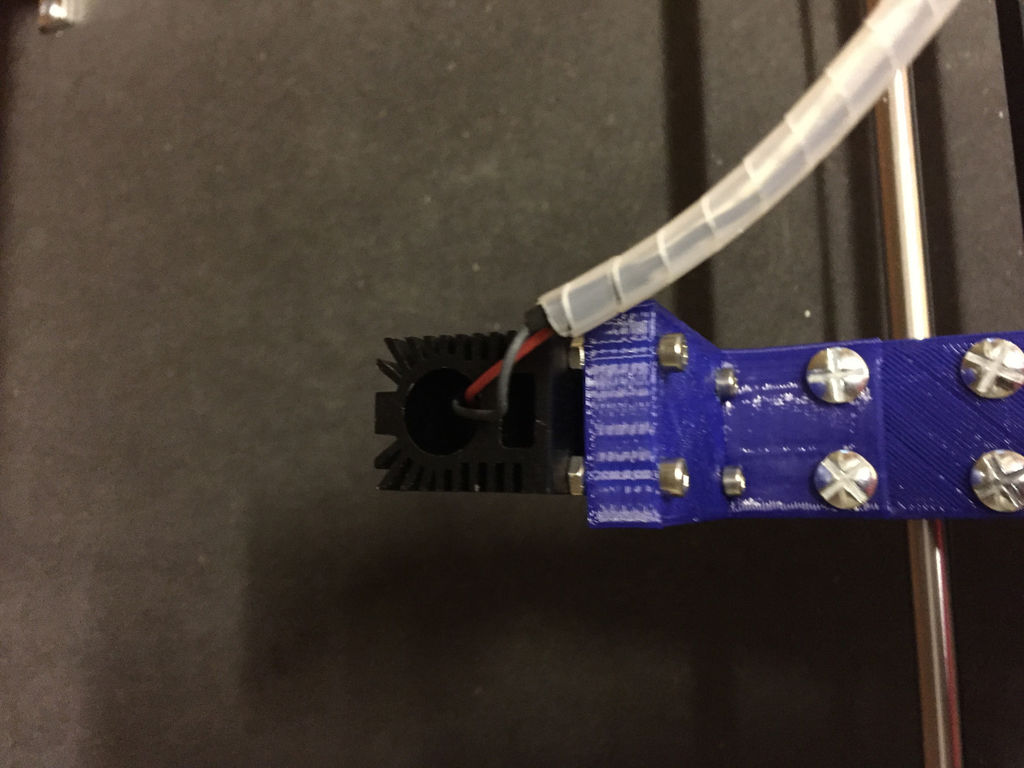
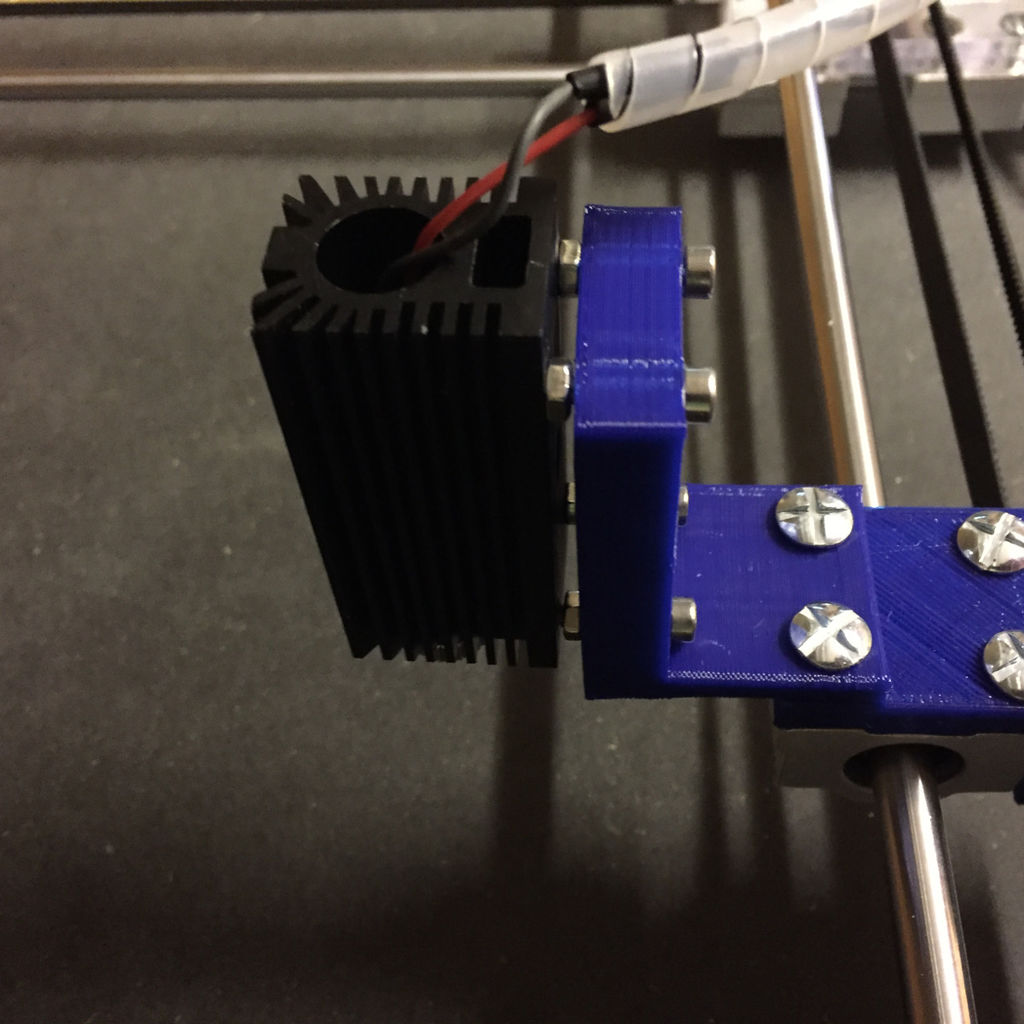
- напечатанное на 3Д-принтере крепление для лазера
- 4 винта М3 с гайками
- радиатор
- лазерный модуль
Радиатор не должен соприкасаться с креплением лазера, так как оно пластиковое, а радиатор сильно нагревается.
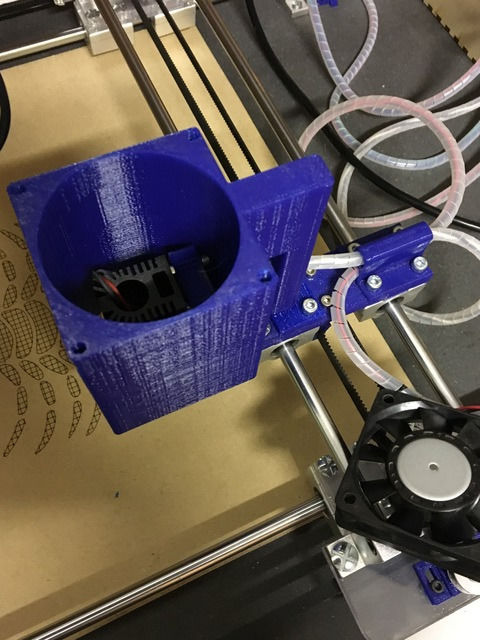
Шаг 22
Устанавливаем крепление вентилятора
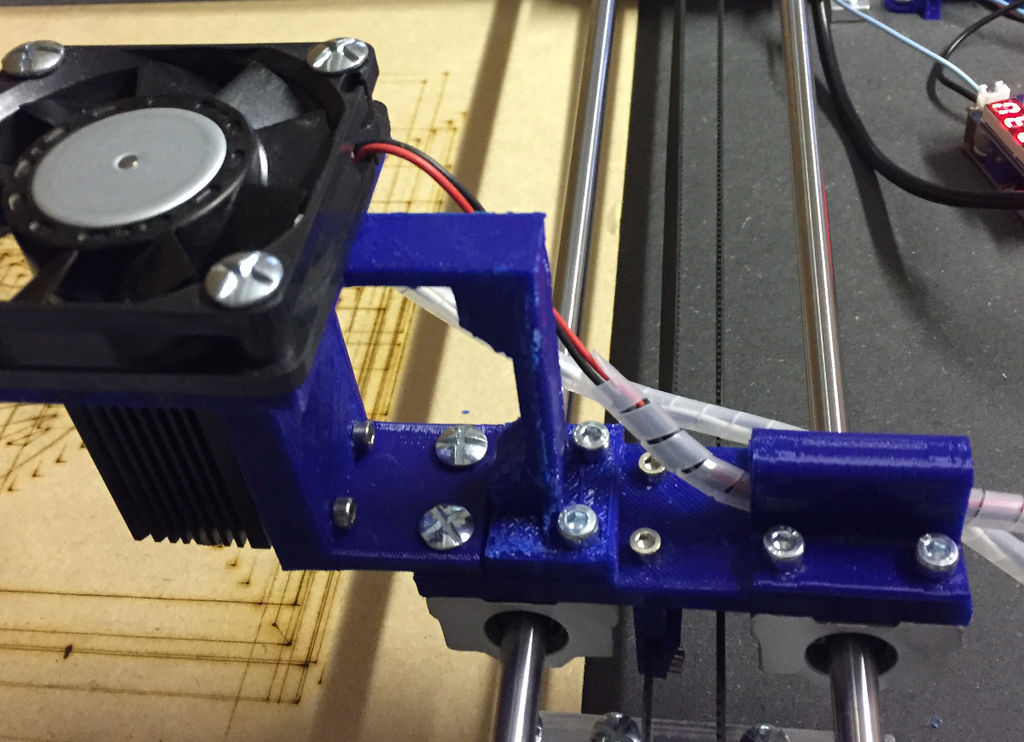
- напечатанное на 3Д-принтере крепление вентилятора
- 4 винта М4
- вентилятор
Теперь сделайте следующее:
- просверлите 4 отверстия в креплении
- вставьте винты в отверстия
- закрепите вентилятор
Шаг 23
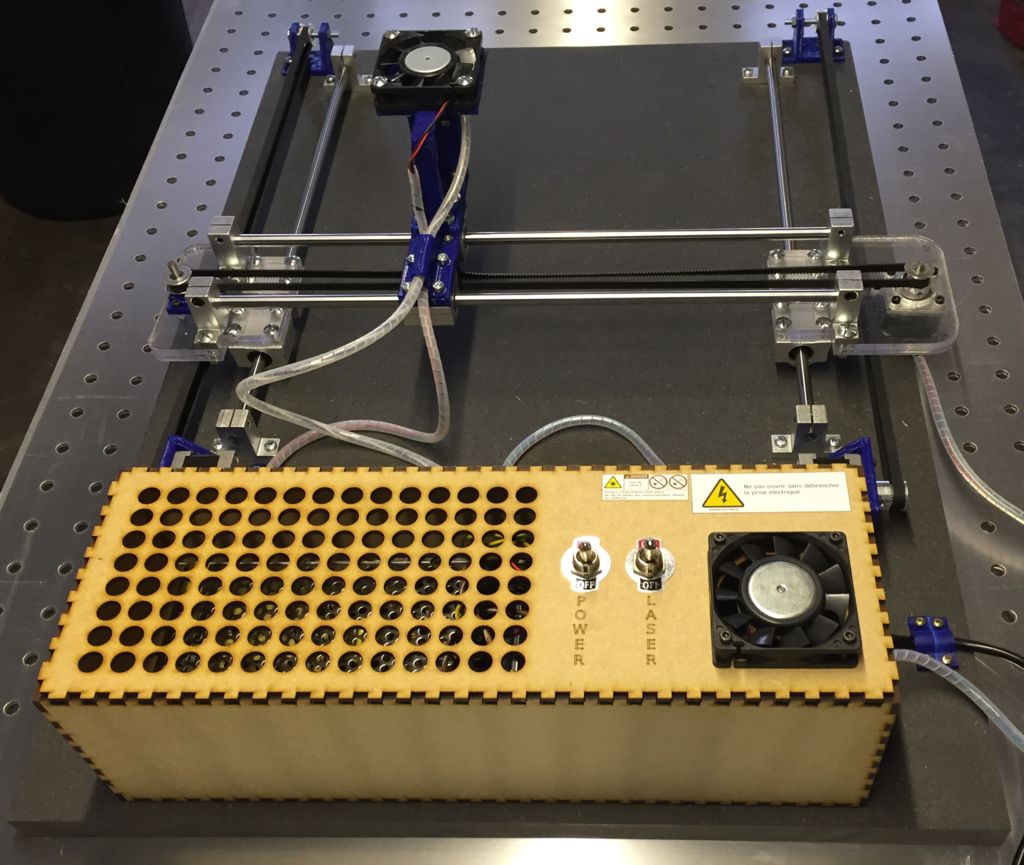
Корпус с прорезями, сделанными лазером, я сделал с помощью он-лайн программы MakerCase.
Шаг 24




Шаг 25
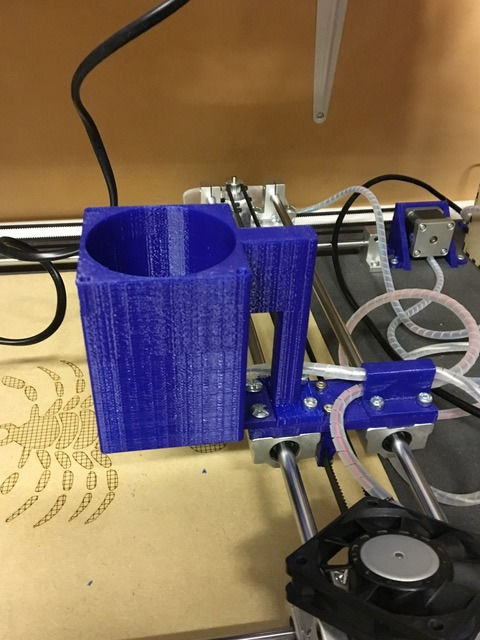

Я доработал крепление вентилятора для лучшего охлаждения, файл STL приложен. Просто напечатайте крепление на 3Д-принтере и замените им старое крепление.
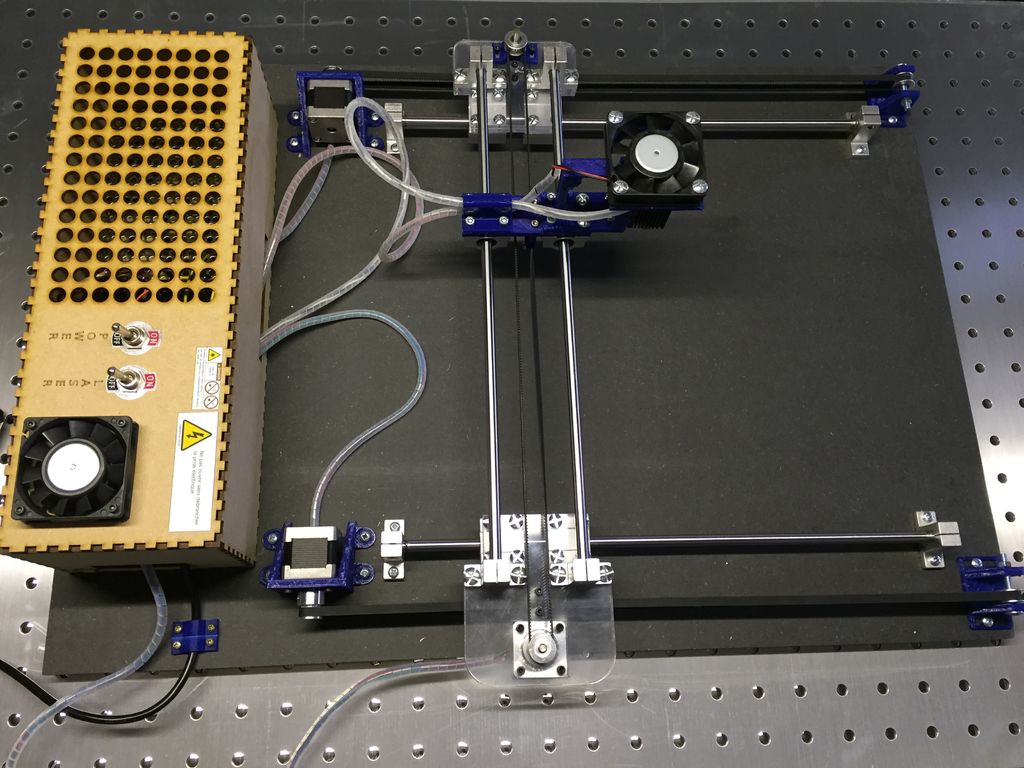
Шаг 26
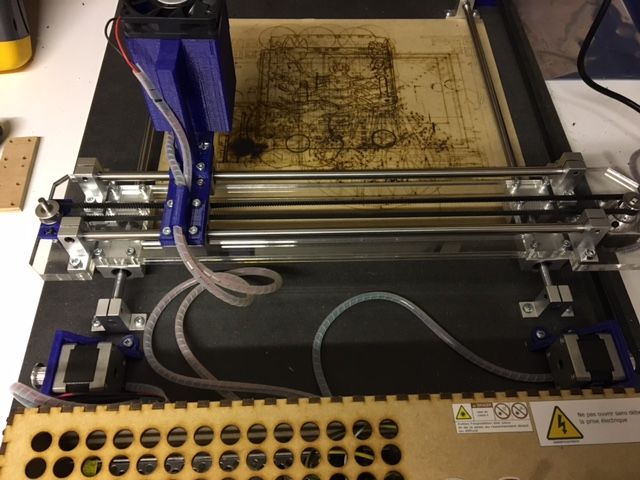
Я усилил ось Y, чтобы увеличить точность на ней. Также я заметил, что ось Х получилась более точной, и не могу найти этому причину.
Усиление не очень работает, но после него для нормальной работы по оси Y хватает одного мотора, поэтому левый мотор я снял.
Новое испытание показало, что после изменений работа по оси Y стала такой же точной, как и по оси Х.
Рекомендую такую доработку.

Рассказываю как сделать какую-либо вещь с пошаговыми фото и видео инструкциями.
Источник
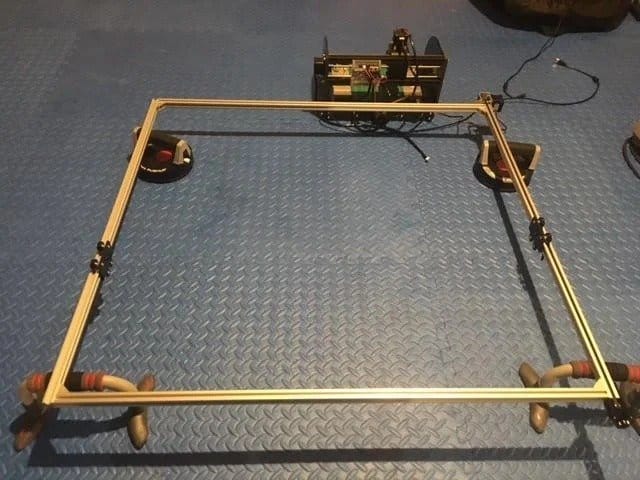
Самостоятельное проектирование и сборка лазерного гравера больших размеров
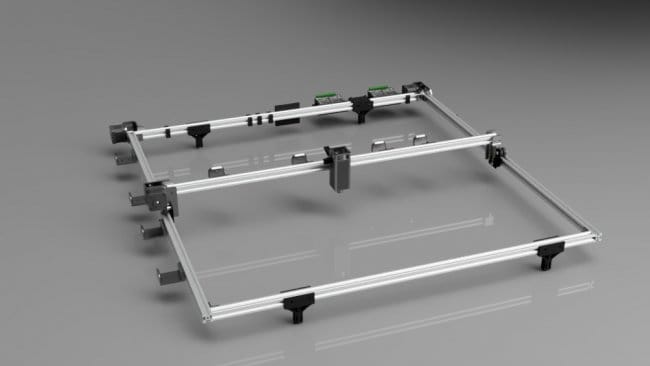
Благодаря этой статье, мы с вами научимся не только изготавливать большой и легкий лазерный гравер мощностью 7,5 Вт, но и научимся работать в программе Autodesk Fusion 360.
Этот станок с ЧПУ, позволяет кроить большие листы ткани для изготовления одежды, резать фанеру до 0,7 см толщиной, резать винил, выжигать маски на печатных платах.
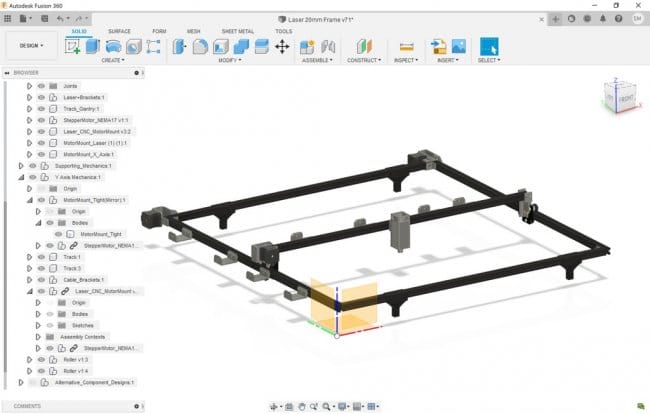
Шаг первый: о Autodesk Fusion 360
Autodesk Fusion 360 — это программа, объединяющая в себе множество функций. 3D-моделирование, дизайн, расчет и наглядный пример работы механизмов, проектирование, моделирование, инженерный анализ, организация производства, все это можно реализовать с помощью этой программы.
Для начала работы с программой нужно перейти на сайт Autodesk.com и загрузите программу. Затем создать учетную запись.
Шаг второй: базовая механическая сборка — импорт из McMaster-Carr
Чтобы сразу перейти к этому дизайну, можно загрузить авторский файл Autodesk Fusion 360 здесь . С его помощью можно экспортировать и печатать 3D-детали.
Чтобы научиться проектировать, давайте сделаем базовую вставку компонентов. Начнем с проектирования корпуса станка для лазерной гравировки.
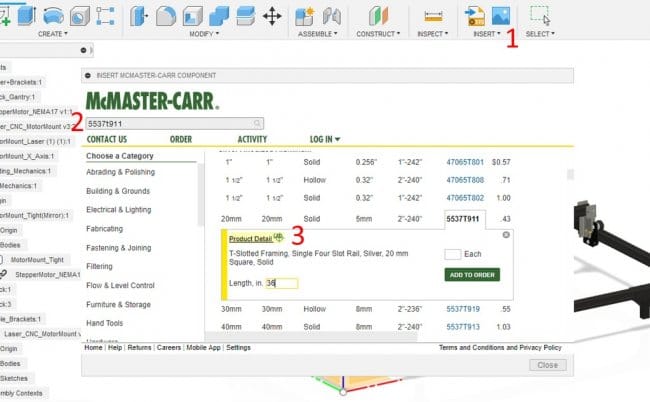
Кликаем: Вставить -> Компонент McMaster-Carr.
Вводим: 5537t911 в строку поиска.
Кликаем значок сведений о продукте.
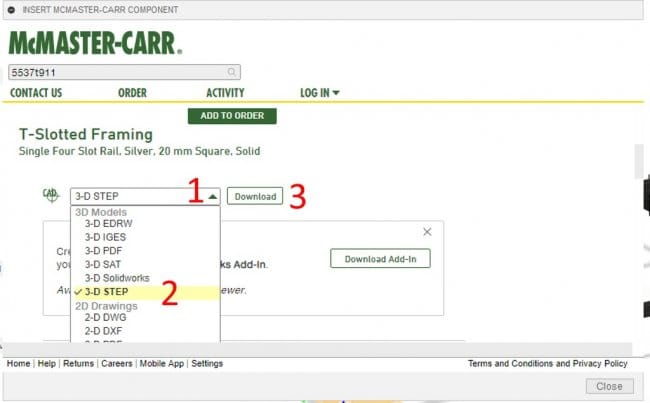
Прокручиваем страницу чтобы найти загруженную 3D-модель CAD. Теперь у пользователя есть Т-образная дорожка. Повторяем процесс для McMaster-Carr № 5537T935, чтобы получить угловые кронштейны.
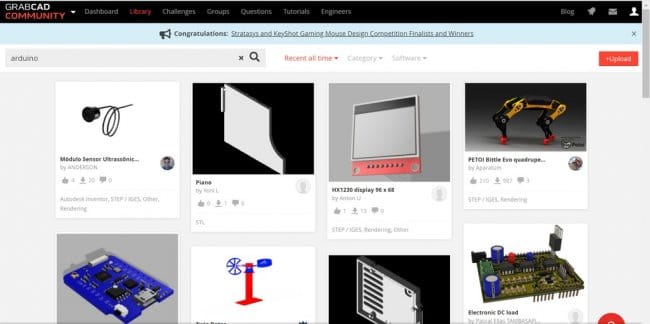
Шаг третий: базовая механическая сборка — импорт с GrabCad.com
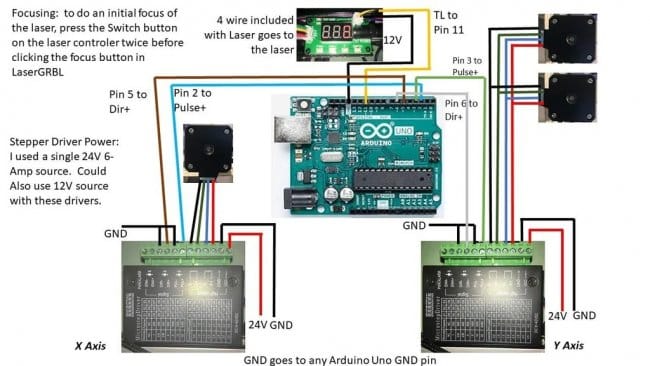
GrabCad.com — это сообщество, которое делиться своими 3D-проектами. В большинстве случаев многие устройства уже смоделированы, например, Arduino и шаговые двигатели. Так что, если их нет в каталоге McMaster-Carr, скорее всего, их можно найти на GrabCad.com.
Работа в GrabCad.com следующая:
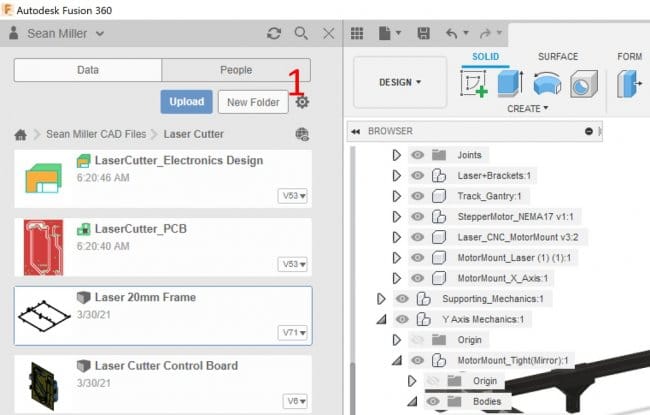
Сначала нужно создать новую папку с именем Prefabs в Autodesk Fusion 360.
Перейти на GrabCad.com и найти интересующий объект, например, шаговый двигатель Nema 17.
Загрузить файлы на свой локальный диск и разархивировать их.
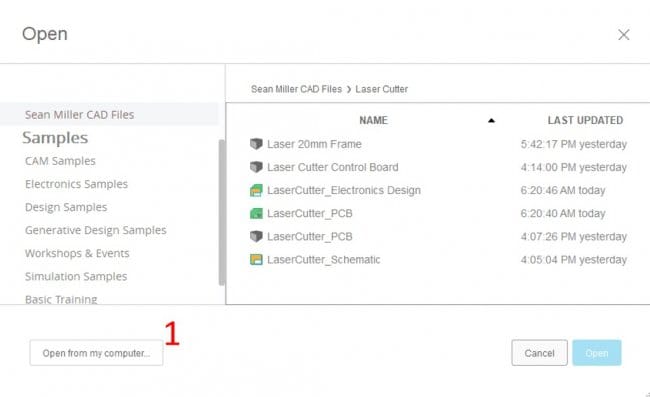
В Autodesk Fusion 360 выберите «Файл» -> «Открыть» -> «Открыть с моего компьютера» и найти распакованный файл.
После импорта файла обязательно нужно сохранить его в папке PreFabs.
После сохранения можно просто перетащить его в свои будущие проекты. Обновление этого главного файла также обновит все связанные файлы дизайна.
Дополнительные элементы, которые мастер использовал в этой сборке и загруженные из GrabCad.com:
Stepper Motor
Laser
Arduino uno
Autodesk Fusion 360 позволяет проектировать и моделировать функции проекта, а также совершенствовать его форму. Сделать это можно с помощью рабочей области Render.
В рабочей области Render можно визуализировать проект с помощью фотореалистичного освещения и шейдеров. Для этого нужно кликнуть рабочую область Render и с помощью опций настроить визуализацию.
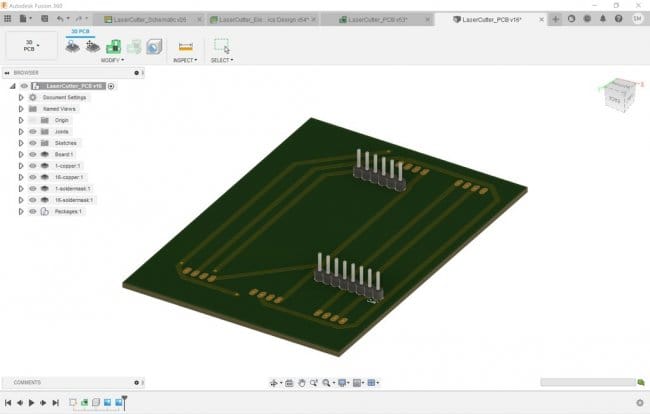
Шаг шестой: проектирование и изготовление печатной платы
Еще одно замечательное применение Autodesk Fusion 360 — проектирование печатных плат. Рабочий процесс проектирования органично вписывается в физический проект, позволяя создавать идеальные корпуса.
Чтобы спроектировать плату нужно выполнить следующие действия:
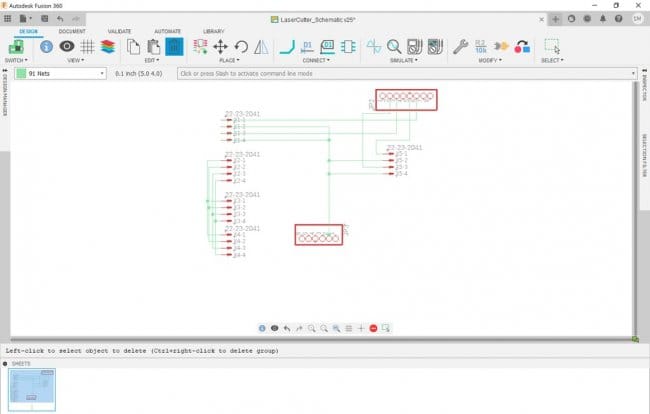
1) Добавьте несколько заголовков в схему и соедините их вместе.
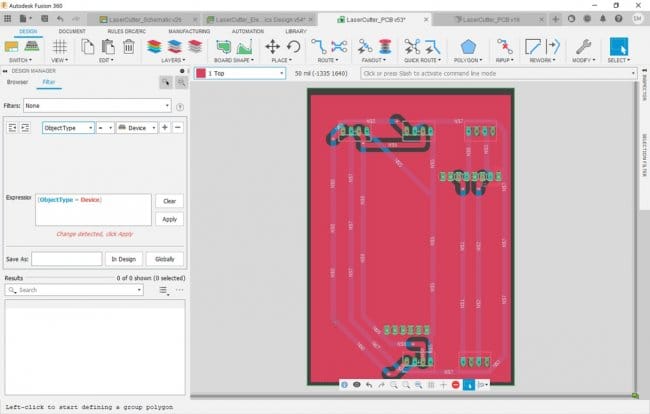
2) Разместите заголовки на 2D-макете платы.
3) Переключитесь на 3D-вид, чтобы увидеть, как он выглядит, и перетащите его в основной файл проекта, чтобы можно было спроектировать для платы корпус.
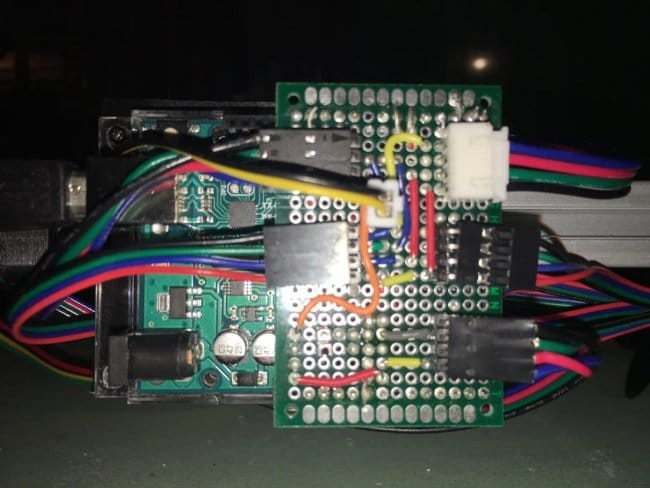
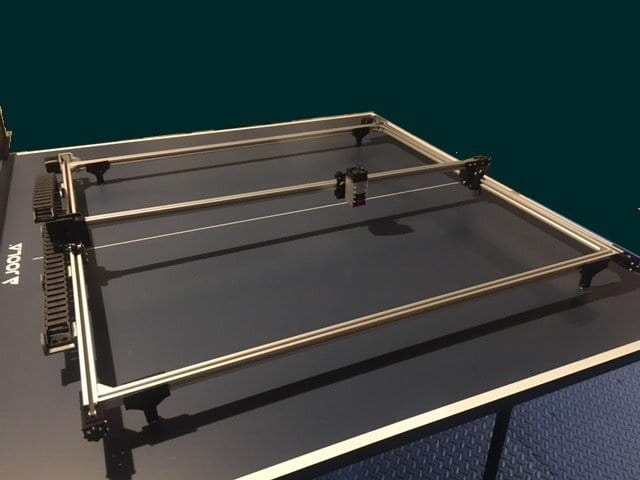
Шаг восьмой: сборка станка
Сборка очень простая, понадобится пара гаечных ключей и примерно один час времени.
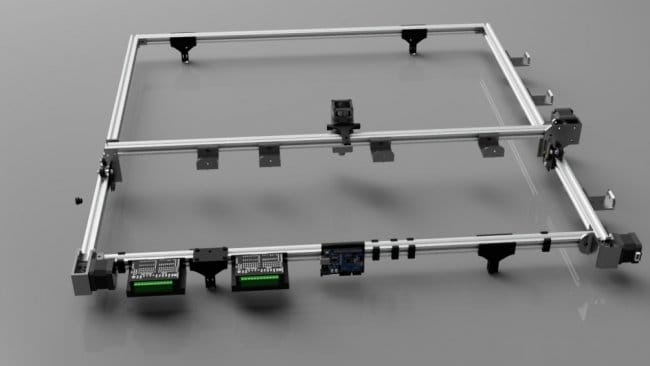
Первая фотография в этом шаге — частично собранная рама. Пока печатались детали мастер провел тест двигателей, подключив электронику с другого станка.
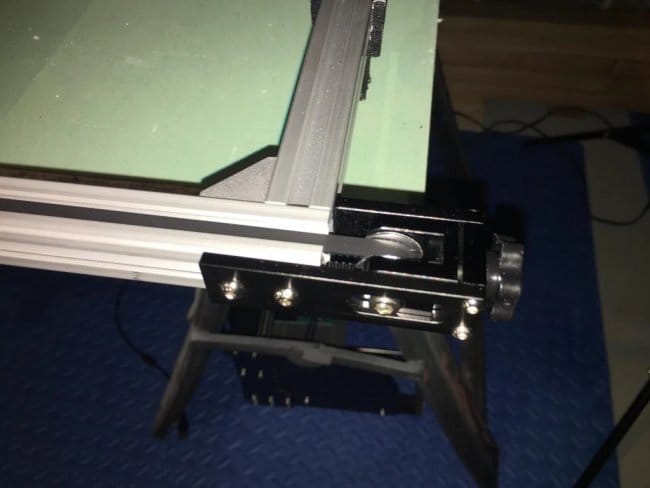
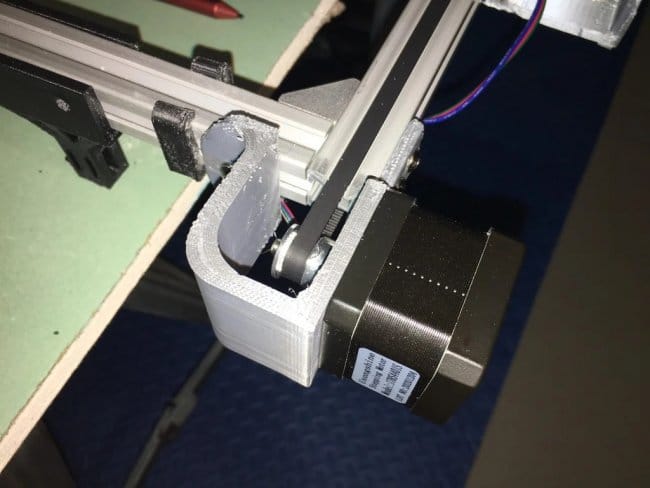
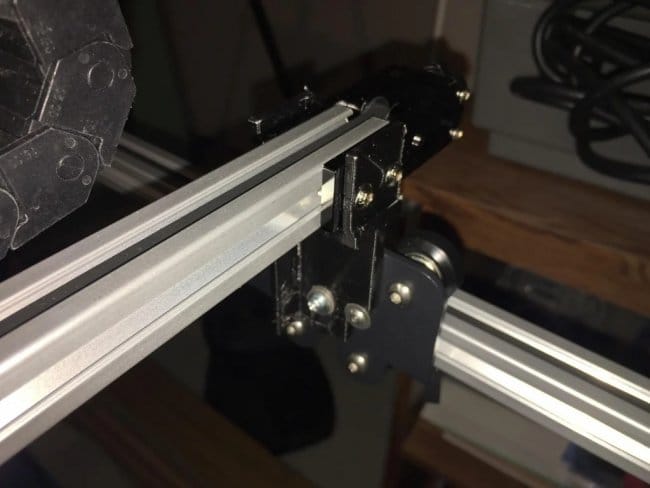
Остальные изображения показывают процесс сборки.
Компоненты просто монтируются с помощью крепежа T-Slot.




Шаг девятый: настройка
После сборки нужно сделать ряд настроек.
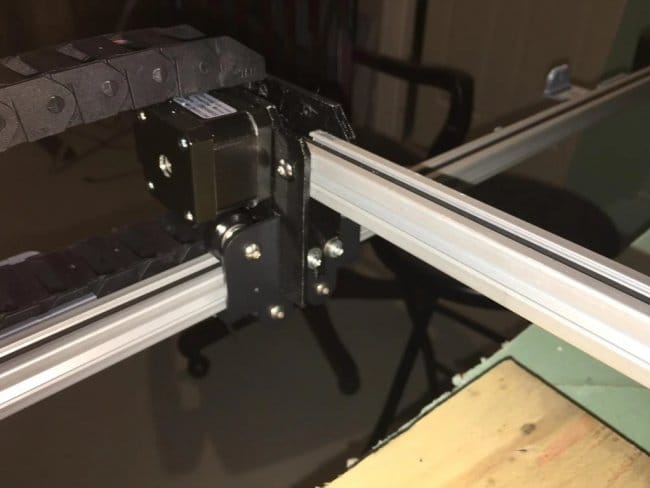
Выравнивание оси.
Эта процедура необходима для обеспечения совмещения левого и правого рельсов оси Y. Нужно просто взять рулетку и измерив, расстояние от края станка, выровнять обе стороны.
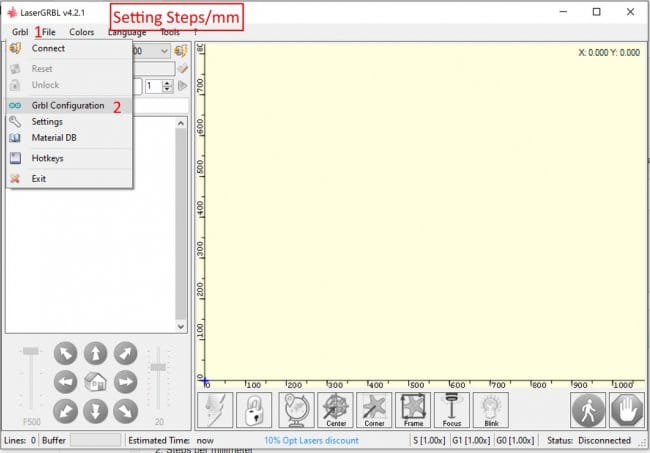
Шаг на миллиметр.
По умолчанию прошивка Arduino будет иметь 250 шагов / мм, как установлено LaserGRBL и это не совпадает с реальной механикой станка.
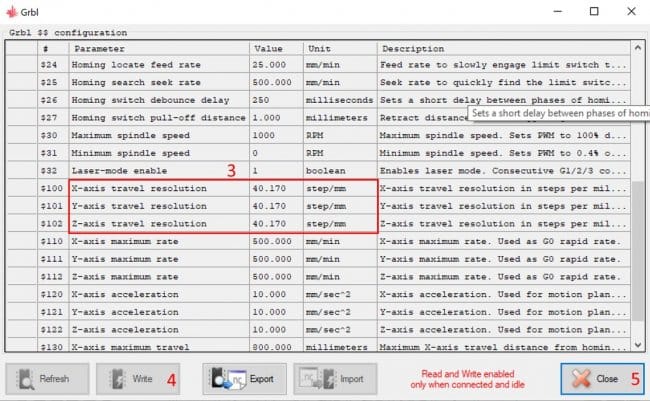
Исходя из 5-миллиметровых тяг с шагом ремня ГРМ 2 мм, используемых в этой конструкции, шаг / мм необходимо установить на 40,170. Мастер получил эти цифры опытным путем. Прожег 50-миллиметровую линию, измерил ее истинное значение, а затем получил коэффициент расхождения. Чтобы изменить значение в LaserGRBL, кликните меню Grbl -> Grbl Configuration.
Лазерная фокусировка.
Дальше нужно отрегулировать лазер. В передней части лазера есть небольшое колесо, которое поворачивается в ту или иную сторону, чтобы отрегулировать его фокус.
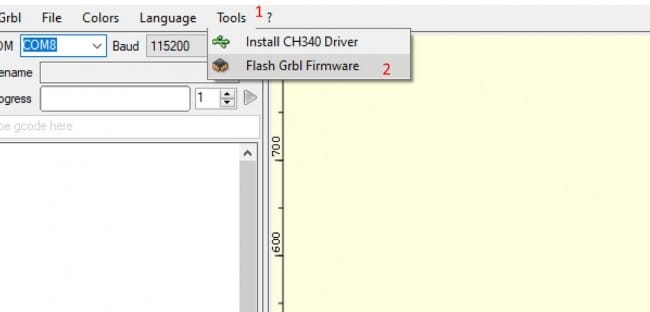
Шаг десятый: работа в GRBL
Мастер использует LaserGRBL в качестве управляющего программного обеспечения для ЧПУ. Это программное обеспечение совместимо с Arduino UNO. Также, для генерации g-код можно использовать Autodesk Fusion 360. Программа очень удобна для новичков. Удобное и информативное меню с всплывающими подсказками. Чистые и точные линии для трассировки и резки. Можно связать операции травления и резки в одной программе и т.д.
Для работы в Autodesk Fusion 360:
Откройте новый файл и создайте эскиз
Добавьте текст
Нажмите кнопку Manufacture Workspace.
Щелкните пункт меню Fabrication.
Выберите Cutting.
Установите ваш инструмент на Laser и выберите Etching.
Выберите профили для травления.
Смоделируйте процесс с помощью Actions -> Simulate.
Нажмите Actions—>Post Process, чтобы сгенерировать G-код.
Откройте LaserGRBL и выберите File -> Open.
Этот процесс можно посмотреть на видео.
Источник